Far-field approximations for multi-timescale microswimmers near a boundary
Pith reviewed 2026-06-27 11:58 UTC · model grok-4.3
The pith
Incorporating time dependence and higher-order singularities into far-field models of microswimmers near boundaries reveals hovering states absent from simpler force-dipole models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We demonstrate that the inclusion of time-dependence into these higher order models significantly expands the reachable parameter space, in particular by increasing its dimensionality. In these extended dynamics, we observe three distinct behaviours: crashing, escaping and hovering. Notably, hovering states are absent from the dynamics predicted by the simplest models, but are observed in more complex models.
What carries the argument
Multiscale analysis incorporating time-dependent higher-order flow singularities to extend the force-dipole far-field model.
If this is right
- The parameter space for swimmer dynamics gains an extra dimension from time dependence.
- Three behaviors become possible: crashing into the boundary, escaping away from it, and hovering at constant distance.
- Hovering requires the inclusion of both higher-order singularities and time dependence.
- The model remains applicable closer to the boundary than the basic dipole version.
Where Pith is reading between the lines
- Real microswimmers with periodic propulsion might achieve stable hovering near walls in ways missed by averaged models.
- The multiscale method could extend to other problems involving oscillating swimmers in confined fluid flows.
- Observations of hovering in experiments would support using higher-order terms over simple dipoles.
Load-bearing premise
The far-field approximation stays valid near the boundary even when higher-order singularities are added, and the separation between fast oscillation and slow swimming timescales holds.
What would settle it
Numerical simulation or physical experiment of an oscillating microswimmer near a wall showing hovering at the distance predicted by the higher-order time-dependent model but not by the time-independent dipole model.
Figures











read the original abstract
Hydrodynamic interactions with boundaries can significantly affect the trajectories of microscale swimmers. In simple swimmer models, a common assumption is that swimmer shape remains constant, essentially averaging over the rapid oscillations in geometry and associated fluid flows that often are the source of propulsion. Previous work in minimal force-dipole models has shown how the inclusion of time-dependent swimmer changes can lead to a fundamentally wider class of behaviours than for their classic (implicitly averaged) counterparts. However, since force dipole models correspond to the leading-order term in the far-field description of the swimmer-induced flow, they break down as the swimmer approaches a boundary and predictions can become qualitatively inaccurate. Here, we extend the minimal force-dipole model by incorporating higher order flow singularities, systematically accounting for rapid oscillations in shape and singularity strength through a multiscale analysis. We demonstrate that the inclusion of time-dependence into these higher order models significantly expands the reachable parameter space, in particular by increasing its dimensionality. In these extended dynamics, we observe three distinct behaviours: crashing, escaping and hovering. Notably, hovering states are absent from the dynamics predicted by the simplest models, but are observed in more complex models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends minimal force-dipole models of microswimmers near a no-slip boundary by systematically incorporating higher-order singularities (quadrupole and beyond) whose strengths vary with the swimmer's rapid shape oscillations. A multiscale asymptotic analysis separates fast and slow timescales to derive reduced ODEs governing the slow evolution of height and orientation. The resulting dynamics exhibit three regimes—crashing, escaping, and hovering—with hovering states appearing only when the higher-order terms are retained, thereby expanding the reachable parameter space relative to leading-order models.
Significance. If the far-field construction remains quantitatively reliable, the work supplies a concrete, higher-dimensional reduced model that predicts qualitatively new stable behaviors (hovering) absent from dipole-only approximations. This could serve as a practical bridge between minimal models and full boundary-integral simulations for microswimmer navigation near surfaces.
major comments (2)
- [§2] §2 and the asymptotic construction: the reduced ODEs for height and orientation are derived under the assumption that the swimmer-boundary distance remains ≫ swimmer radius even after inclusion of higher singularities; no explicit error bound, validity criterion, or matched near-field asymptotics is supplied to justify that the hovering fixed points lie inside the regime where the far-field truncation is accurate.
- [Results section (hovering states)] The central claim that hovering states are absent from simplest models but present in higher-order ones rests on the quantitative accuracy of the multiscale reduction near the boundary; without a direct comparison to full Stokes solutions or an a-posteriori check of the neglected near-field contributions, it is unclear whether the new states survive in the true hydrodynamics.
minor comments (2)
- [§2] Notation for the time-dependent singularity strengths is introduced without a clear table or appendix listing the explicit expressions for each multipole coefficient as functions of the fast phase.
- [Figures] Figure captions for the phase portraits should explicitly state the parameter values used and whether the trajectories are obtained from the reduced ODEs or from direct simulation.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The comments highlight important points about the regime of validity of the far-field model. We respond to each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [§2] §2 and the asymptotic construction: the reduced ODEs for height and orientation are derived under the assumption that the swimmer-boundary distance remains ≫ swimmer radius even after inclusion of higher singularities; no explicit error bound, validity criterion, or matched near-field asymptotics is supplied to justify that the hovering fixed points lie inside the regime where the far-field truncation is accurate.
Authors: We agree that the manuscript does not supply explicit a-posteriori error bounds or matched near-field asymptotics. The derivation in §2 relies on the standard far-field ordering h ≫ a, and the reported hovering equilibria satisfy this ordering for the parameter values examined. We will revise §2 to include a brief discussion of the expected truncation error (based on the relative magnitude of the retained quadrupole and higher terms) and a simple numerical check confirming that the hovering fixed points remain outside the near-field region for the plotted trajectories. revision: yes
-
Referee: [Results section (hovering states)] The central claim that hovering states are absent from simplest models but present in higher-order ones rests on the quantitative accuracy of the multiscale reduction near the boundary; without a direct comparison to full Stokes solutions or an a-posteriori check of the neglected near-field contributions, it is unclear whether the new states survive in the true hydrodynamics.
Authors: The manuscript presents a systematic far-field reduction; the central claim is therefore that, within this reduced model, inclusion of time-dependent higher-order singularities qualitatively enlarges the phase space to include stable hovering states absent from the dipole truncation. We do not assert that the hovering states are quantitatively accurate for the full Stokes problem at small h. We will add an explicit caveat in the Results section noting the far-field limitation and that direct validation against boundary-integral simulations lies outside the present scope. revision: partial
Circularity Check
No circularity: derivation uses standard asymptotic expansions independent of outputs
full rationale
The paper constructs its multiscale far-field model via systematic inclusion of higher-order singularities and time-dependent strengths, starting from the known breakdown of the leading dipole near boundaries. This yields extended ODEs whose solutions exhibit new behaviors such as hovering; these outcomes are not presupposed in the construction or obtained by fitting parameters to the target dynamics. Prior force-dipole literature is cited for context and differentiation rather than as a load-bearing uniqueness theorem or ansatz that forces the present results. No self-definitional steps, renamed empirical patterns, or predictions that reduce to fitted inputs appear in the derivation chain.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
(19a), independent of the value ofhor the system parameters
Existence of trivial steady states We note dθ/dt= 0 forθ=nπ,n∈Zin Eq. (19a), independent of the value ofhor the system parameters. We therefore refer to the steady states withθ= 0, πastrivial, corresponding to the swimmer facing away from and towards the boundary, respectively. Without loss of generality, we only consider s <0 as we can map to s >0 by shi...
-
[2]
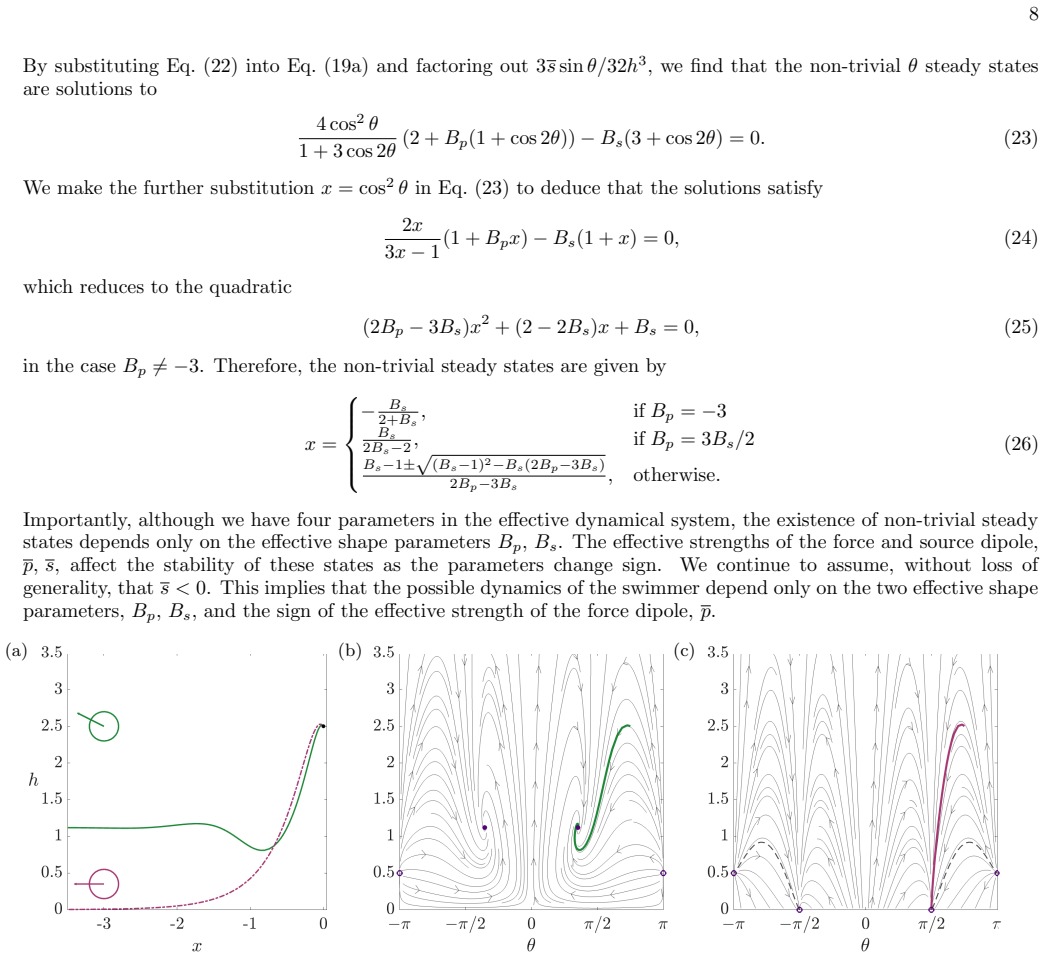
(19b) yields the steady height as a function ofθ h= 2scosθ p(1 + 3 cos 2θ).(22) 8 By substituting Eq
Existence of non-trivial steady states To find the remaining steady states, which we refer to asnon-trivialsteady states, we note that seeking dh/dt= 0 in Eq. (19b) yields the steady height as a function ofθ h= 2scosθ p(1 + 3 cos 2θ).(22) 8 By substituting Eq. (22) into Eq. (19a) and factoring out 3 ssinθ/32h 3, we find that the non-trivialθsteady states ...
-
[3]
(27a) for all values ofhand system parameters, and continue to refer toθ= 0, πas trivial
Existence of trivial steady states We again find that dθ/dt= 0 forθ=nπ,n∈Zin Eq. (27a) for all values ofhand system parameters, and continue to refer toθ= 0, πas trivial. We assume q >0 as we can map to q <0 by shifting byθbyπ. Substitutingθ= 0,±π into Eq. (27b) the trivial steady states are θ= 0, h= q p andθ=π, h=− q p .(28) We find that the eigenvalues ...
-
[4]
Existence of non-trivial steady states To find the remaining, non-trivial, steady states we proceed as before and seek solutions to dh/dt= 0 in Eq. (27b). The steady height as a function ofθat fixed points is h=− 2qcosθ p(1 + 3 cosθ) (1−3 cos 2θ).(30) We substitute Eq. (30) into Eq. (27a) and factor out 3qsinθ/32h 4 (the roots of which correspond to the t...
-
[5]
(19a) does not depend on the swimming speed, we have the same trivial steady statesθ= 0, θ=πas Section III B
Trivial steady states As theθequation Eq. (19a) does not depend on the swimming speed, we have the same trivial steady statesθ= 0, θ=πas Section III B. Now, however, the corresponding heights are solutions to cubic polynomials: 4uh3 + 2ph− s= 0,(40a) −4uh 3 + 2ph+ s= 0,(40b) forθ= 0 andθ=π, respectively. Forh >0 in the domain, we find three cases: no solu...
-
[6]
However, theh equation Eq
Non-trivial steady states For the remaining, non-trivial, steady states, we seek the steady values ofhas a function ofθ. However, theh equation Eq. (39) corresponds to solving the cubic equation 8ucosθh 3 + p(1 + 3 cos 2θ)h−2 scosθ= 0.(41) Instead of seeking solutions directly, we factor out 3 sinθ/32h 4 from theθequation Eq. (19a) and write h= Bss 2pcosθ...
-
[7]
Klapper and J
I. Klapper and J. Dockery, Mathematical description of microbial biofilms, SIAM Rev.52, 221 (2010)
2010
-
[8]
S. B. Guttenplan and D. B. Kearns, regulation of flagellar motility during biofilm formation, FEMS Microbiol. Rev.37, 849 (2013)
2013
-
[9]
Suarez and A
S. Suarez and A. A. Pacey, Sperm transport in the female reproductive tract, Hum. Reprod. Update12, 23 (2006)
2006
-
[10]
Elgeti, U
J. Elgeti, U. B. Kaupp, and G. Gompper, Hydrodynamics of sperm cells near surfaces, Biophys. J.99, 1018 (2010)
2010
-
[11]
Rothschild, Non-random distribution of bull spermatozoa in a drop of sperm suspension, Nature198, 1221 (1963)
1963
-
[12]
P. D. Frymier, R. M. Ford, H. C. Berg, and P. T. Cummings, Three-dimensional tracking of motile bacteria near a solid planar surface., PNAS92, 6195 (1995)
1995
-
[13]
Bianchi, F
S. Bianchi, F. Saglimbeni, G. Frangipane, D. Dell’Arciprete, and R. Di Leonardo, 3D dynamics of bacteria wall entrapment at a water–air interface, Soft Matter15, 3397 (2019)
2019
-
[14]
Berg and L
H. Berg and L. Turner, Chemotaxis of bacteria in glass capillary arrays. Escherichia coli, motility, microchannel plate, and light scattering, Biophys. J.58, 919 (1990)
1990
-
[15]
A. P. Berke, L. Turner, H. C. Berg, and E. Lauga, Hydrodynamic attraction of swimming microorganisms by surfaces, Phys. Rev. Lett.101, 038102 (2008)
2008
-
[16]
Di Leonardo, D
R. Di Leonardo, D. Dell’Arciprete, L. Angelani, and V. Iebba, Swimming with an image, Phys. Rev. Lett.106, 038101 (2011)
2011
-
[17]
Kantsler, J
V. Kantsler, J. Dunkel, M. Polin, and R. E. Goldstein, Ciliary contact interactions dominate surface scattering of swimming eukaryotes, PNAS110, 1187 (2013)
2013
-
[18]
S. Bianchi, F. Saglimbeni, and R. Di Leonardo, Holographic imaging reveals the mechanism of wall entrapment in swimming bacteria, Phys. Rev. X7, 10.1103/physrevx.7.011010 (2017)
-
[19]
S. E. Spagnolie and E. Lauga, Hydrodynamics of self-propulsion near a boundary: predictions and accuracy of far-field approximations, J. Fluid Mech.700, 105 (2012)
2012
-
[20]
Elgeti and G
J. Elgeti and G. Gompper, Microswimmers near surfaces, Eur. Phys. J. Spec. Top.225, 2333 (2016)
2016
-
[21]
E. F. Yeo, B. J. Walker, P. Pearce, and M. P. Dalwadi, A shear-induced limit on bacterial surface adhesion in fluid flow, PNAS123, e2516069123 (2026)
2026
-
[22]
Lauga, W
E. Lauga, W. R. DiLuzio, G. M. Whitesides, and H. A. Stone, Swimming in circles: motion of bacteria near solid boundaries, Biophys. J.90, 400 (2006)
2006
-
[23]
Or and R
Y. Or and R. M. Murray, Dynamics and stability of a class of low reynolds number swimmers near a wall, Phys. Rev. E: Stat. Nonlinear Soft Matter Phys.79, 045302 (2009)
2009
-
[24]
H. Shum, E. A. Gaffney, and D. J. Smith, Modelling bacterial behaviour close to a no-slip plane boundary: the influence of bacterial geometry, Proc. R. Soc. A466, 1725 (2010)
2010
-
[25]
Giacch´ e, T
D. Giacch´ e, T. Ishikawa, and T. Yamaguchi, Hydrodynamic entrapment of bacteria swimming near a solid surface, Phys. Rev. E82, 056309 (2010)
2010
-
[26]
Manabe, T
J. Manabe, T. Omori, and T. Ishikawa, Shape matters: entrapment of a model ciliate at interfaces, J. Fluid Mech.892, A15 (2020)
2020
-
[27]
Lauga,The fluid dynamics of cell motility, Cambridge Texts in Applied Mathematics (Cambridge University Press, 2020)
E. Lauga,The fluid dynamics of cell motility, Cambridge Texts in Applied Mathematics (Cambridge University Press, 2020)
2020
-
[28]
Drescher, R
K. Drescher, R. E. Goldstein, N. Michel, M. Polin, and I. Tuval, Direct Measurement of the Flow Field around Swimming Microorganisms, Phys. Rev. Lett.105, 168101 (2010). 23
2010
-
[29]
Drescher, J
K. Drescher, J. Dunkel, L. H. Cisneros, S. Ganguly, and R. E. Goldstein, Fluid dynamics and noise in bacterial cell–cell and cell–surface scattering, PNAS108, 10940 (2011)
2011
-
[30]
Ishimoto and E
K. Ishimoto and E. A. Gaffney, Squirmer dynamics near a boundary, Phys. Rev. E88, 062702 (2013)
2013
-
[31]
D. J. Smith, E. A. Gaffney, J. R. Blake, and J. C. Kirkman-Brown, Human sperm accumulation near surfaces: a simulation study, J. Fluid Mech.621, 289 (2009)
2009
-
[32]
P. H. Htet, D. Das, and E. Lauga, Hydrodynamic hovering of swimming bacteria above surfaces, Phys. Rev. Res.6, L032070 (2024)
2024
-
[33]
B. J. Walker, K. Ishimoto, C. Moreau, E. A. Gaffney, and M. P. Dalwadi, Emergent rheotaxis of shape-changing swimmers in Poiseuille flow, J. Fluid Mech.944, R2 (2022)
2022
-
[34]
Omori, K
T. Omori, K. Kikuchi, M. Schmitz, M. Pavlovic, C.-H. Chuang, and T. Ishikawa, Rheotaxis and migration of an unsteady microswimmer, J. Fluid Mech.930, A30 (2022)
2022
-
[35]
B. J. Walker, K. Ishimoto, E. A. Gaffney, C. Moreau, and M. P. Dalwadi, Effects of rapid yawing on simple swimmer models and planar Jeffery’s orbits, Phys. Rev. Fluids7, 023101 (2022)
2022
-
[36]
E. A. Gaffney, M. P. Dalwadi, C. Moreau, K. Ishimoto, and B. J. Walker, Canonical orbits for rapidly deforming planar microswimmers in shear flow, Phys. Rev. Fluids7, L022101 (2022)
2022
-
[37]
M. P. Dalwadi, C. Moreau, E. A. Gaffney, K. Ishimoto, and B. J. Walker, Generalised Jeffery’s equations for rapidly spinning particles. Part 1. Spheroids, J. Fluid Mech.979, A1 (2024)
2024
-
[38]
M. P. Dalwadi, C. Moreau, E. A. Gaffney, B. J. Walker, and K. Ishimoto, Generalised Jeffery’s equations for rapidly spinning particles. Part 2. Helicoidal objects with chirality, J. Fluid Mech.979, A2 (2024)
2024
-
[39]
M. P. Dalwadi, Rapidly yawing spheroids in viscous shear flow: emergent loss of symmetry, J. Fluid Mech.1009, A27 (2025)
2025
-
[40]
B. J. Walker, K. Ishimoto, and E. A. Gaffney, Systematic parameterizations of minimal models of microswimming, Phys. Rev. Fluids8, 034102 (2023)
2023
-
[41]
M. H. Holmes,Introduction to perturbation methods, Vol. 20 (Springer Science & Business Media, 2012)
2012
-
[42]
C. M. Bender and S. A. Orszag,Advanced mathematical methods for scientists and engineers I(New York, NY, 1999)
1999
-
[43]
A. T. Chwang and T. Y.-T. Wu, Hydromechanics of low-Reynolds-number flow. Part 2. Singularity method for Stokes flows, J. Fluid Mech.67, 787 (1975)
1975
-
[44]
Kim and S
S. Kim and S. J. Karrila,Microhydrodynamics: principles and selected applications(Butterworth-Heinemann, 2013)
2013
-
[45]
F. P. Bretherton, The motion of rigid particles in a shear flow at low Reynolds number, J. Fluid Mech.14, 284 (1962)
1962
-
[46]
G. B. Jeffery, The motion of ellipsoidal particles immersed in a viscous fluid, Proc. R. Soc. Lond. A102, 161 (1922)
1922
-
[47]
J. S. Guasto, K. A. Johnson, and J. P. Gollub, Oscillatory flows induced by microorganisms swimming in two dimensions, Phys. Rev. Lett.105, 168102 (2010)
2010
-
[48]
Ishimoto, H
K. Ishimoto, H. Gadˆ elha, E. A. Gaffney, D. J. Smith, and J. Kirkman-Brown, Coarse-graining the fluid flow around a human sperm, Phys. Rev. Lett.118, 124501 (2017)
2017
-
[49]
S. F. Schoeller and E. E. Keaveny, From flagellar undulations to collective motion: predicting the dynamics of sperm suspensions, Journal of The Royal Society Interface15, 20170834 (2018)
2018
-
[50]
L. F. Shampine and M. W. Reichelt, The matlab ode suite (1997), https://doi.org/10.1137/S1064827594276424
-
[51]
Golestanian, J
R. Golestanian, J. M. Yeomans, and N. Uchida, Hydrodynamic synchronization at low Reynolds number, Soft Matter7, 3074 (2011)
2011
-
[52]
Elgeti and G
J. Elgeti and G. Gompper, Emergence of metachronal waves in cilia arrays, PNAS110, 4470 (2013)
2013
-
[53]
Friedrich, Hydrodynamic synchronization of flagellar oscillators, Eur
B. Friedrich, Hydrodynamic synchronization of flagellar oscillators, Eur. Phys. J. Spec. Top.225, 2353 (2016)
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.