Tunable Snapping and Rigid Foldability in the Mars Origami Pattern
Pith reviewed 2026-06-27 07:52 UTC · model grok-4.3
The pith
The Mars origami tessellation is not rigidly foldable because folding-speed ratios cannot propagate consistently across neighboring units.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
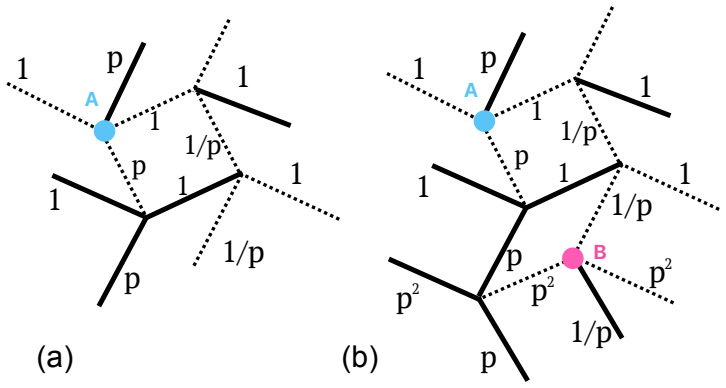
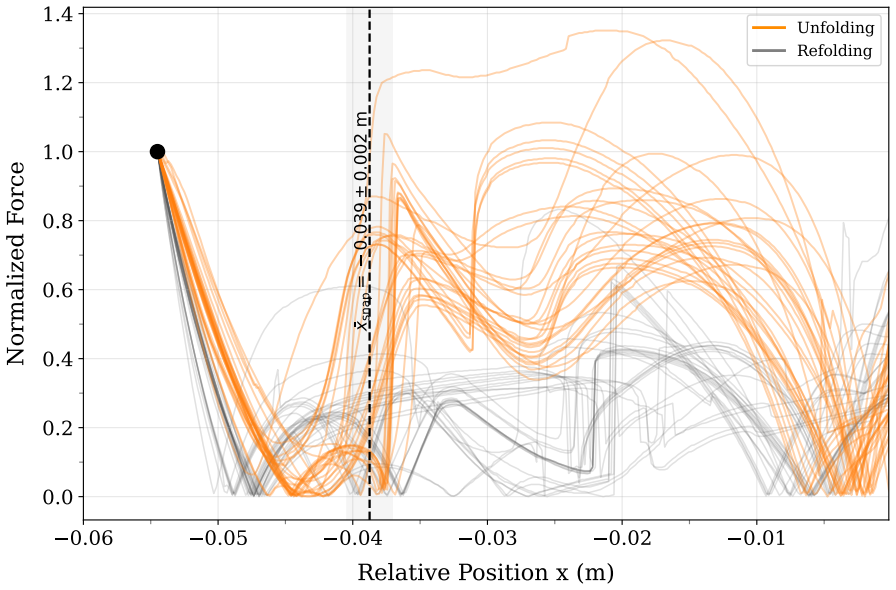
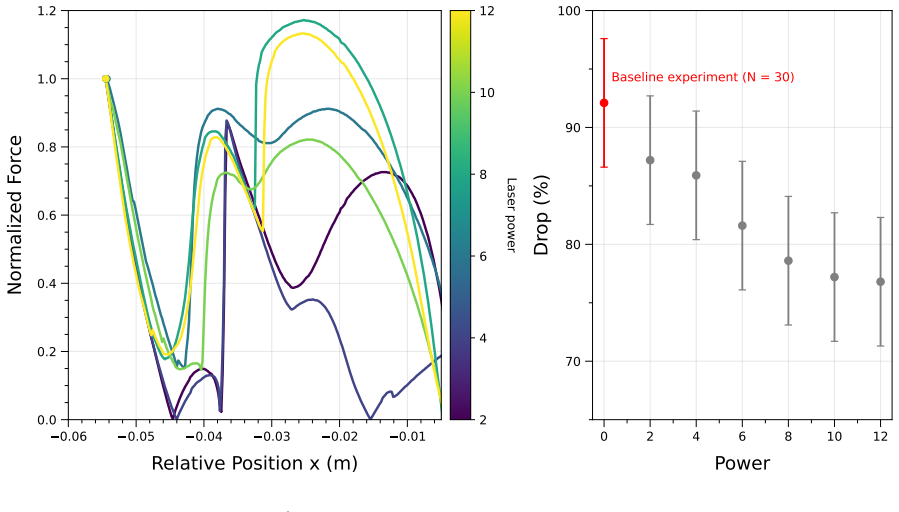
The Mars tessellation, a degree-4 vertex origami pattern composed of alternating square and rhombic faces, is not rigidly foldable because the folding-speed ratios required for vertex compatibility cannot be propagated consistently across neighboring units. This geometric incompatibility forces the facets to bend during folding, giving rise to a reproducible snap-through discontinuity in the force-displacement curve with a mean force drop of about 92.6 +/- 5.5 percent, marking a transition between metastable states. Laser scoring of additional diagonal creases, guided by strain-field simulations, enables continuous tuning of the snap magnitude.
What carries the argument
The Mars tessellation pattern and the inconsistent propagation of folding-speed ratios at its degree-4 vertices.
If this is right
- Geometric frustration in non-rigidly foldable origami patterns can be used to program multistability in thin-sheet metamaterials.
- Strain-field simulations can guide the placement of extra creases to adjust the magnitude of snap-through instabilities.
- The force drop of roughly 93 percent corresponds to a switch between distinct metastable configurations during folding.
Where Pith is reading between the lines
- Similar degree-4 origami patterns that also lack consistent ratio propagation should exhibit comparable snapping behavior.
- Repeating the experiments in materials with very different viscoelastic properties would test whether the snap depends only on geometry.
- The tunable snap could be applied in deployable devices that require a controlled, large change in stiffness at a chosen point.
Load-bearing premise
The observed snap-through is caused by the geometric incompatibility in folding-speed ratios rather than by material viscoelasticity, boundary conditions, or other elastic effects.
What would settle it
A direct measurement showing whether the facets stay flat or bend during folding, or whether the snap-through vanishes when the pattern is altered to permit consistent ratio propagation.
Figures



read the original abstract
Origami-inspired metamaterials exploit the interplay between geometry and elasticity to achieve programmable mechanical responses. Yet the origin and tunability of snap-through instabilities in non-rigidly foldable patterns remain poorly understood. Here we show that the Mars tessellation, a degree-4 vertex origami pattern composed of alternating square and rhombic faces, is not rigidly foldable because the folding-speed ratios required for vertex compatibility cannot be propagated consistently across neighboring units. This geometric incompatibility forces the facets to bend during folding, giving rise to a reproducible snap-through discontinuity in the force-displacement curve with a mean force drop of about 92.6 +/- 5.5 %, marking a transition between metastable states. Laser scoring of additional diagonal creases, guided by strain-field simulations, enables continuous tuning of the snap magnitude. These results reveal a general mechanism by which geometric frustration can be harnessed to program multistability in thin-sheet metamaterials.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that the Mars tessellation (alternating square and rhombic faces at degree-4 vertices) is not rigidly foldable because the folding-speed ratios required for local vertex compatibility cannot be propagated consistently across neighboring units. This geometric incompatibility forces facet bending, producing a reproducible snap-through discontinuity in the force-displacement curve (mean force drop 92.6 ± 5.5 %) that marks a transition between metastable states. Additional diagonal creases, selected via strain-field simulations, allow continuous tuning of the snap magnitude.
Significance. If the geometric mechanism is confirmed as the origin of the instability, the work identifies a route to program multistability in thin-sheet metamaterials through geometric frustration rather than material nonlinearity. The quantitative force-drop measurement and the demonstration of tunability via added creases constitute concrete, falsifiable outputs that could guide design of origami-inspired devices.
major comments (2)
- [Abstract] Abstract: The statement that inconsistent propagation of folding-speed ratios 'forces the facets to bend during folding' is presented without any explicit calculation of the ratios, without a propagation map across the tessellation, and without a demonstration that the incompatibility is unavoidable; this step is load-bearing for the central claim that the observed snap-through originates in rigid-foldability failure.
- [Experimental results] Experimental section (implied by the reported force drop): No protocol details, strain-rate sweeps, alternative polymer tests, or rigid-facet FEM comparisons are supplied to isolate the geometric incompatibility from viscoelastic relaxation, crease compliance, or boundary-induced instabilities; without such controls the attribution of the 92.6 % force drop to the stated mechanism cannot be evaluated.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and will revise the manuscript to strengthen the presentation of the geometric analysis and experimental controls.
read point-by-point responses
-
Referee: [Abstract] Abstract: The statement that inconsistent propagation of folding-speed ratios 'forces the facets to bend during folding' is presented without any explicit calculation of the ratios, without a propagation map across the tessellation, and without a demonstration that the incompatibility is unavoidable; this step is load-bearing for the central claim that the observed snap-through originates in rigid-foldability failure.
Authors: We agree that the abstract is too concise and does not reference the supporting calculations. We will revise the manuscript by adding a dedicated subsection with explicit calculations of the folding-speed ratios (derived from spherical trigonometry at the degree-4 vertex), a propagation map showing inconsistency across neighboring units, and a demonstration that no non-trivial consistent assignment exists without requiring facet bending. The abstract will be updated to reference this analysis. These additions will make the load-bearing step explicit. revision: yes
-
Referee: [Experimental results] Experimental section (implied by the reported force drop): No protocol details, strain-rate sweeps, alternative polymer tests, or rigid-facet FEM comparisons are supplied to isolate the geometric incompatibility from viscoelastic relaxation, crease compliance, or boundary-induced instabilities; without such controls the attribution of the 92.6 % force drop to the stated mechanism cannot be evaluated.
Authors: We agree that the current manuscript lacks sufficient experimental protocol and controls. We will expand the methods section with full protocol details. We will also add strain-rate sweep data (showing rate-independence of the snap), results from alternative polymers, and rigid-facet FEM comparisons that do not reproduce the discontinuity (while elastic-facet models do). These revisions will better isolate the geometric mechanism. revision: yes
Circularity Check
No significant circularity in the claimed derivation
full rationale
The paper's central claim rests on a geometric argument that incompatible folding-speed ratios at alternating square-rhombus degree-4 vertices prevent consistent propagation and force facet bending, together with an independent experimental measurement of the 92.6% force drop. No equations, fitted parameters, or self-citations are presented that would make any reported quantity reduce to a definition or prior result by construction. The derivation is therefore self-contained against external geometric and experimental benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Mars tessellation is a degree-4 vertex origami pattern composed of alternating square and rhombic faces whose rigid foldability is governed by propagation of folding-speed ratios across neighboring units.
Reference graph
Works this paper leans on
-
[1]
and Lang, Robert J
Evans, Thomas A. and Lang, Robert J. and Magleby, Spencer P. and Howell, Larry L. , TITLE =. Origami ^6 : Proceedings of the Sixth International Meeting on Origami Science, Mathematics, and Education
-
[2]
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2010 , volume=
Tomohiro Tachi , title=. Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2010 , volume=. 2010 , pages=
2010
-
[3]
Hull and Michael Urbanski , booktitle =
Thomas C. Hull and Michael Urbanski , booktitle =. Rigid foldability of the augmented square twist , year =
-
[4]
Rigid foldability and mountain-valley crease assignments of square-twist origami pattern , journal =. 2020 , issn =. doi:https://doi.org/10.1016/j.mechmachtheory.2020.103947 , url =
-
[5]
and Gershenfeld, Neil , booktitle =
Ghassaei, Amanda and Demaine, Erik D. and Gershenfeld, Neil , booktitle =. Fast, Interactive Origami Simulation using. 2018 , editor =
2018
-
[6]
N. P. Bende and M. A. Mahadevan and J. A. Santangelo , title =. Proceedings of the National Academy of Sciences , year =
-
[7]
Yasuda and J
H. Yasuda and J. Yang , title =. Physical Review Letters , year =
-
[8]
Fang and S
H. Fang and S. Li and K. Wang and K. W. Wang , title =. Physical Review E , year =
-
[9]
Kamrava and A
S. Kamrava and A. Mousanezhad and R. Ghosh and A. Vaziri , title =. Scientific Reports , year =
-
[10]
Lyu and P
S. Lyu and P. Lu and X. Wang and H. Wu , title =. International Journal of Mechanical Sciences , year =
-
[11]
Flores and D
J. Flores and D. Restrepo and G. Paulino , title =. Extreme Mechanics Letters , year =
-
[12]
Hwang and H.-T
H.-Y. Hwang and H.-T. Hsieh and C.-C. Wang , title =. International Journal of Mechanical Sciences , year =
-
[13]
Meloni and M
M. Meloni and M. Lanzara and L. Greco and et al. , title =. Advanced Science , year =
-
[14]
Silverberg and Jun-Hee Na and Arthur A
Jesse L. Silverberg and Jun-Hee Na and Arthur A. Evans and Bin Liu and Thomas C. Hull and Christian D. Santangelo and Robert J. Lang and Ryan C. Hayward and Itai Cohen , title =. Nature Materials , year =
-
[15]
Origami Science and Art: Proceedings of the Second International Meeting of Origami Science and Scientific Origami , editor =
Paulo Barreto , title =. Origami Science and Art: Proceedings of the Second International Meeting of Origami Science and Scientific Origami , editor =. 1997 , publisher =
1997
-
[16]
Hull , title =
Thomas C. Hull , title =. 2020 , publisher =
2020
-
[17]
Lang and Spencer Magleby and Larry Howell , title =
Robert J. Lang and Spencer Magleby and Larry Howell , title =. Journal of Mechanisms and Robotics , volume =. 2016 , doi =
2016
-
[18]
Guest , title =
Mark Schenk and Simon D. Guest , title =. Proceedings of the National Academy of Sciences , year =
-
[19]
Brunck and F
V. Brunck and F. Lechenault and A. Reid and M. Adda‐Bedia , title =. Physical Review E , year =
-
[20]
Paulino , title =
Maryam Eidini and Glaucio H. Paulino , title =. Science Advances , year =
-
[21]
Origami Multistability: From Single Vertices to Metasheets , journal =
Scott Waitukaitis and R. Origami Multistability: From Single Vertices to Metasheets , journal =. 2015 , volume =
2015
-
[22]
Chunlong Wang and Hongwei Guo and Rongqiang Liu and Zongquan Deng and Yan Chen and Zhong You , title =. Science Advances , year =. doi:10.1126/sciadv.adk8662 , url =
-
[23]
J. M. T. Thompson and G. W. Hunt , title =. 1984 , isbn =
1984
-
[24]
Lang and Alexander H
Jian Qiu and Jeffrey H. Lang and Alexander H. Slocum , title =. Journal of Microelectromechanical Systems , year =
-
[25]
2002 , doi =
Modelling the folding of paper into three dimensions using affine transformations , journal =. 2002 , doi =
2002
-
[26]
Origami4: Proceedings of the Fourth International Conference on Origami in Science, Mathematics, and Education , year =
Watanabe, Naoki and Kawaguchi, Koji , title =. Origami4: Proceedings of the Fourth International Conference on Origami in Science, Mathematics, and Education , year =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.