Total-Lagrangian vectorial lattice Boltzmann method for finite-strain hyperelasticity with curved boundaries
Pith reviewed 2026-06-27 18:35 UTC · model grok-4.3
The pith
A total-Lagrangian vectorial lattice Boltzmann method simulates finite-strain hyperelasticity on curved embedded domains.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that writing the continuum equations as a conservative first-order system for material velocity and deformation gradient, then choosing vector-valued populations whose moments recover the state and the material-coordinate Piola fluxes, produces D2Q4×6 and D3Q6×12 schemes that can be closed on curved boundaries through cut-link interpolation and a compatibility projection while extending the previous grid-aligned two-dimensional formulation to curved domains and three-dimensional lattices.
What carries the argument
Vector-valued populations whose moments recover material velocity and deformation gradient, closed by cut-link interpolation and a compatibility projection that aligns recovered displacement with the evolved deformation gradient on embedded active-node graphs.
If this is right
- The method resolves the geometric mismatch for two- and three-dimensional hyperelastic dynamics on curved domains.
- Explicit collide-stream updates are retained on Cartesian grids.
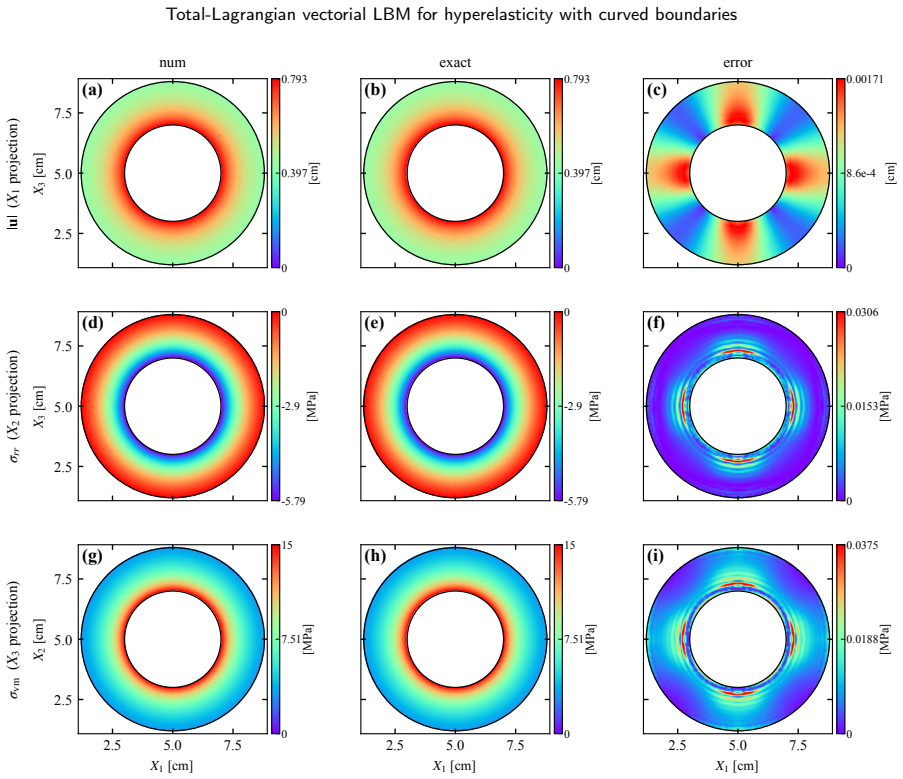
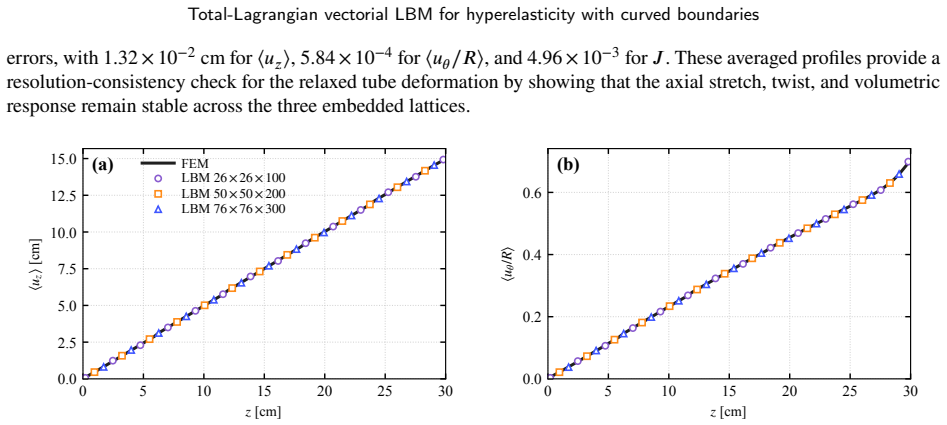
- Benchmarks show agreement with exact finite-strain fields, nonlinear radial boundary-value problems, and finite-element references.
- The formulation extends the previous grid-aligned two-dimensional work to arbitrary boundaries and three dimensions.
Where Pith is reading between the lines
- The level-set embedding and projection may support direct coupling to fluid solvers on the same Cartesian grid for fluid-structure problems.
- The same population structure could be tested on other constitutive models that admit a first-order conservative form.
- Long-time runs with large rotations could reveal whether the projection step introduces or suppresses drift in the deformation gradient.
Load-bearing premise
The reconstruction of missing populations at cut links, when combined with the compatibility projection, keeps the recovered displacement aligned with the evolved deformation gradient.
What would settle it
A computed displacement or stress field in the nonlinear radial boundary-value problem that deviates from the exact finite-strain solution beyond discretization error would show that the cut-link closure or projection fails to maintain consistency.
Figures





read the original abstract
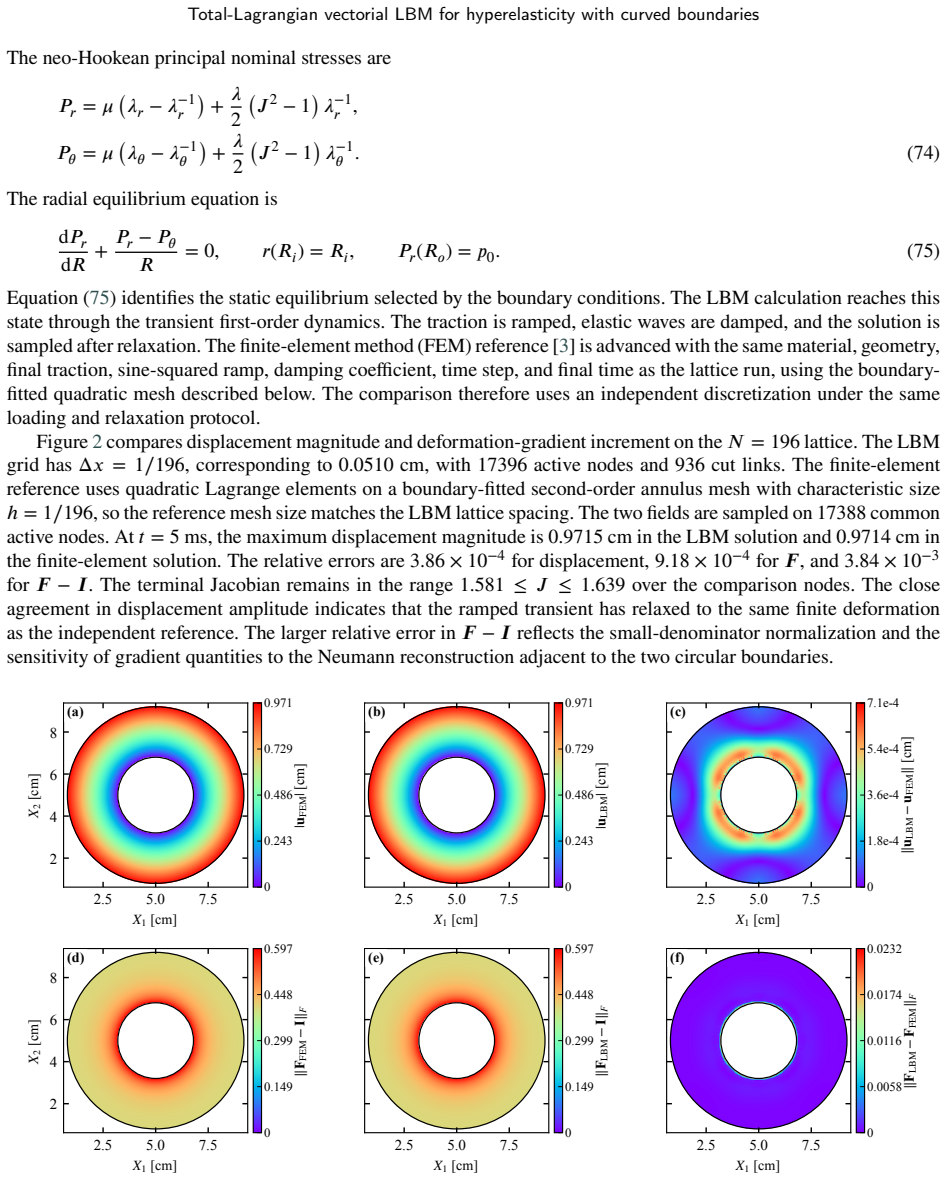
Finite-strain hyperelasticity on curved embedded domains poses a geometric challenge for lattice Boltzmann methods. After streaming across an embedded material surface, the missing population is recovered at the physical cut-link point, where the lattice direction, surface normal, and tangential deformation directions are generally distinct. We develop a total-Lagrangian vectorial lattice Boltzmann method that resolves this geometric mismatch for two- and three-dimensional hyperelastic dynamics. The continuum equations are written as a conservative first-order system for material velocity and deformation gradient. Vector-valued populations are chosen so that their moments recover the state and the material-coordinate Piola fluxes, giving D2Q4\(\times\)6 and D3Q6\(\times\)12 schemes from one \(D\)-dimensional construction. Curved boundaries are embedded by a level set and closed link by link through opposite-population moment identities, cut-link interpolation, and local geometric information at the boundary point. The reconstruction is coupled to a compatibility projection that keeps the recovered displacement aligned with the evolved deformation gradient on embedded active-node graphs. The resulting method extends the previous grid-aligned two-dimensional formulation to curved domains and three-dimensional lattices while retaining explicit collide-stream updates on Cartesian grids. Benchmarks in two and three dimensions show agreement with exact finite-strain fields, nonlinear radial boundary-value problems, and finite-element references.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a total-Lagrangian vectorial lattice Boltzmann method for finite-strain hyperelasticity on curved embedded domains. Continuum equations are cast as a first-order conservative system in material velocity and deformation gradient; vector populations are constructed so that their moments recover the state variables and material Piola fluxes, yielding D2Q4×6 and D3Q6×12 schemes. Curved boundaries are treated via level-set embedding, closed link-by-link with opposite-population moment identities, cut-link interpolation, and a compatibility projection that enforces consistency between recovered displacement and the evolved deformation gradient on active-node graphs. The method extends a prior grid-aligned 2-D formulation to curved surfaces and 3-D lattices while preserving explicit collide-stream updates; benchmarks are reported to agree with exact finite-strain solutions, nonlinear radial problems, and finite-element references.
Significance. If the moment-recovery identities and projection closure hold under finite strain, the construction supplies an explicit Cartesian-grid LBM route to hyperelastic dynamics on non-grid-aligned boundaries without fitted parameters or body-fitted meshes. The single D-dimensional construction that produces both the 2-D and 3-D vector schemes, together with the geometric closure that avoids ad-hoc reconstruction, would constitute a technically clean advance for embedded-boundary solid-mechanics LBM.
major comments (2)
- [Abstract (description of reconstruction and projection)] The central claim rests on the compatibility projection that aligns recovered displacement with the evolved F on embedded active-node graphs. Without an explicit statement of the projection operator (its matrix form, its null-space properties, or a discrete conservation identity it preserves), it is impossible to verify that the projection does not introduce O(1) errors in the deformation gradient on curved cuts.
- [Abstract (moment recovery paragraph)] The moment sets for the D2Q4×6 and D3Q6×12 schemes are asserted to recover velocity, F, and Piola fluxes exactly. The manuscript must exhibit the explicit moment matrices and the inversion that yields the equilibrium populations; any rank deficiency or dependence on the local normal would undermine the parameter-free claim.
minor comments (2)
- Notation for the vector populations (e.g., how the six or twelve components are indexed) should be introduced once with a compact table or diagram rather than repeated in prose.
- The level-set representation of the curved surface and the precise definition of the cut-link interpolation point are mentioned but not illustrated; a single schematic showing lattice direction, surface normal, and tangential deformation directions would clarify the geometric mismatch being resolved.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable comments on our manuscript. We provide point-by-point responses to the major comments below and will revise the manuscript accordingly to address the concerns raised.
read point-by-point responses
-
Referee: [Abstract (description of reconstruction and projection)] The central claim rests on the compatibility projection that aligns recovered displacement with the evolved F on embedded active-node graphs. Without an explicit statement of the projection operator (its matrix form, its null-space properties, or a discrete conservation identity it preserves), it is impossible to verify that the projection does not introduce O(1) errors in the deformation gradient on curved cuts.
Authors: We agree that an explicit formulation of the projection operator is necessary for verification. In the revised manuscript, we will include the matrix form of the projection, analyze its null-space properties, and demonstrate the discrete conservation identity it preserves. This will confirm that the projection maintains consistency without introducing O(1) errors on curved boundaries. revision: yes
-
Referee: [Abstract (moment recovery paragraph)] The moment sets for the D2Q4×6 and D3Q6×12 schemes are asserted to recover velocity, F, and Piola fluxes exactly. The manuscript must exhibit the explicit moment matrices and the inversion that yields the equilibrium populations; any rank deficiency or dependence on the local normal would undermine the parameter-free claim.
Authors: The moment matrices are derived from the single D-dimensional construction detailed in the methods section. To address this, we will add the explicit moment matrices and the inversion procedure in the revised manuscript, showing that the recovery is exact, the matrices are full rank, and independent of the local normal, thereby upholding the parameter-free property. revision: yes
Circularity Check
No significant circularity detected
full rationale
The derivation constructs a total-Lagrangian vectorial LBM by selecting populations whose moments recover the conservative first-order system for velocity and deformation gradient, then closes curved boundaries via level-set embedding, opposite-population identities, cut-link interpolation, and a compatibility projection. These steps rest on standard moment-matching and geometric identities rather than any self-definition, fitted-input prediction, or load-bearing self-citation chain. The extension of prior grid-aligned work is mentioned but does not reduce the central curved-boundary construction to its own inputs. The method is presented as self-contained against exact solutions and FE references.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The continuum equations are written as a conservative first-order system for material velocity and deformation gradient.
Reference graph
Works this paper leans on
-
[1]
Ogden, Non-Linear Elastic Deformations, Dover Publications, Mineola, 1997
R.W. Ogden, Non-Linear Elastic Deformations, Dover Publications, Mineola, 1997
1997
-
[2]
Holzapfel, Nonlinear Solid Mechanics: A Continuum Approach for Engineering, Wiley, Chichester, 2000
G.A. Holzapfel, Nonlinear Solid Mechanics: A Continuum Approach for Engineering, Wiley, Chichester, 2000
2000
-
[3]
Bonet, R.D
J. Bonet, R.D. Wood, Nonlinear Continuum Mechanics for Finite Element Analysis, second ed., Cambridge University Press, Cambridge, 2008
2008
-
[4]
Belytschko, W.K
T. Belytschko, W.K. Liu, B. Moran, K.I. Elkhodary, Nonlinear Finite Elements for Continua and Structures, second ed., Wiley, Chichester, 2014
2014
-
[5]
Humphrey, Review paper: Continuum biomechanics of soft biological tissues, Proc
J.D. Humphrey, Review paper: Continuum biomechanics of soft biological tissues, Proc. R. Soc. Lond. A 459 (2029) (2003) 3–46
2029
-
[6]
Z. Jia, Y. Yu, S. Hou, L. Wang, Biomimetic architected materials with improved dynamic performance, J. Mech. Phys. Solids 125 (2019) 178–197
2019
-
[7]
Lengiewicz, M
J. Lengiewicz, M. de Souza, M.A. Lahmar, C. Courbon, D. Dalmas, S. Stupkiewicz, J. Scheibert, Finite deformations govern the anisotropic shear-induced area reduction of soft elastic contacts, J. Mech. Phys. Solids 143 (2020) 104056
2020
-
[8]
Methods Appl
J.-S.Chen,C.Pan,C.-T.Wu,W.K.Liu,Reproducingkernelparticlemethodsforlargedeformationanalysisofnon-linearstructures,Comput. Methods Appl. Mech. Engrg. 139 (1–4) (1996) 195–227
1996
-
[9]
Więckowski, The material point method in large strain engineering problems, Comput
Z. Więckowski, The material point method in large strain engineering problems, Comput. Methods Appl. Mech. Engrg. 193 (39–41) (2004) 4417–4438
2004
-
[10]
Peskin, The immersed boundary method, Acta Numer
C.S. Peskin, The immersed boundary method, Acta Numer. 11 (2002) 479–517
2002
-
[11]
Boffi, L
D. Boffi, L. Gastaldi, L. Heltai, C.S. Peskin, On the hyper-elastic formulation of the immersed boundary method, Comput. Methods Appl. Mech. Engrg. 197 (25–28) (2008) 2210–2231
2008
-
[12]
Vadala-Roth, S
B. Vadala-Roth, S. Acharya, N.A. Patankar, S. Rossi, B.E. Griffith, Stabilization approaches for the hyperelastic immersed boundary method for problems of large-deformation incompressible elasticity, Comput. Methods Appl. Mech. Engrg. 365 (2020) 112978
2020
-
[13]
Burman, S
E. Burman, S. Claus, P. Hansbo, M.G. Larson, A. Massing, CutFEM: Discretizing geometry and partial differential equations, Internat. J. Numer. Methods Engrg. 104 (7) (2015) 472–501
2015
-
[14]
McNamara, G
G.R. McNamara, G. Zanetti, Use of the Boltzmann equation to simulate lattice-gas automata, Phys. Rev. Lett. 61 (20) (1988) 2332–2335
1988
-
[15]
Y.H. Qian, D. d’Humières, P. Lallemand, Lattice BGK models for Navier–Stokes equation, Europhys. Lett. 17 (6) (1992) 479–484
1992
-
[16]
Chen, G.D
S. Chen, G.D. Doolen, Lattice Boltzmann method for fluid flows, Annu. Rev. Fluid Mech. 30 (1998) 329–364
1998
-
[17]
Succi, The Lattice Boltzmann Equation for Fluid Dynamics and Beyond, Clarendon Press, Oxford, 2001
S. Succi, The Lattice Boltzmann Equation for Fluid Dynamics and Beyond, Clarendon Press, Oxford, 2001
2001
-
[18]
T.Krüger,H.Kusumaatmaja,A.Kuzmin,O.Shardt,G.Silva,E.M.Viggen,TheLatticeBoltzmannMethod:PrinciplesandPractice,Springer, Cham, 2017
2017
-
[19]
J.A. Sethian, Level Set Methods and Fast Marching Methods: Evolving Interfaces in Computational Geometry, Fluid Mechanics, Computer Vision, and Materials Science, second ed., Cambridge University Press, Cambridge, 1999
1999
-
[20]
J. Feng, C. Wang, Y. Guo, Y. Liu, J. Min, M. Wang, K. Xu, Helmholtz-guided suppression of spurious currents in multicomponent pseudopotential model for high-fidelity immiscible flow in porous media, Phys. Fluids 38 (2) (2026) 026611
2026
-
[21]
J. Feng, J. Leng, J. Jiang, X. Chu, Entropic lattice Boltzmann method for general anisotropic advection–diffusion, arXiv:2605.01774, 2026
Pith/arXiv arXiv 2026
-
[22]
R.Mei,L.-S.Luo,W.Shyy,AnaccuratecurvedboundarytreatmentinthelatticeBoltzmannmethod,J.Comput.Phys.155(2)(1999)307–330
1999
-
[23]
M.Bouzidi,M.Firdaouss,P.Lallemand,MomentumtransferofaBoltzmann-latticefluidwithboundaries,Phys.Fluids13(11)(2001)3452– 3459
2001
-
[24]
X. Yin, G. Yan, T. Li, Direct simulations of the linear elastic displacements field based on a lattice Boltzmann model, Internat. J. Numer. Methods Engrg. 107 (3) (2016) 234–251
2016
-
[25]
O.Boolakee,M.Geier,L.DeLorenzis,AnewlatticeBoltzmannschemeforlinearelasticsolids:periodicproblems,Comput.MethodsAppl. Mech. Engrg. 404 (2023) 115756
2023
-
[26]
Boolakee, M
O. Boolakee, M. Geier, L. De Lorenzis, Dirichlet and Neumann boundary conditions for a lattice Boltzmann scheme for linear elastic solids on arbitrary domains, Comput. Methods Appl. Mech. Engrg. 415 (2023) 116225
2023
-
[27]
Marconi, B
S. Marconi, B. Chopard, A lattice Boltzmann model for a solid body, Internat. J. Modern Phys. B 17 (1–2) (2003) 153–156
2003
-
[28]
O’Brien, T
G.S. O’Brien, T. Nissen-Meyer, C.J. Bean, A lattice Boltzmann method for elastic wave propagation in a Poisson solid, Bull. Seismol. Soc. Am. 102 (3) (2012) 1224–1234
2012
-
[29]
Murthy, P.K
J.S.N. Murthy, P.K. Kolluru, V. Kumaran, S. Ansumali, Lattice Boltzmann method for wave propagation in elastic solids, Commun. Comput. Phys. 23 (4) (2018) 1223–1240
2018
-
[30]
M. Escande, P.K. Kolluru, L.M. Cléon, P. Sagaut, Lattice Boltzmann method for wave propagation in elastic solids with a regular lattice: theoretical analysis and validation, arXiv:2009.06404, 2020
arXiv 2009
-
[31]
Schlüter, C
A. Schlüter, C. Kuhn, R. Müller, Lattice Boltzmann simulation of antiplane shear loading of a stationary crack, Comput. Mech. 62 (5) (2018) 1059–1069
2018
-
[32]
Faust, A
E. Faust, A. Schlüter, H. Müller, F. Steinmetz, R. Müller, Dirichlet and Neumann boundary conditions in a lattice Boltzmann method for elastodynamics, Comput. Mech. 73 (2) (2024) 317–339
2024
-
[33]
S.Jin,Z.Xin,Therelaxationschemesforsystemsofconservationlawsinarbitraryspacedimensions,Comm.PureAppl.Math.48(3)(1995) 235–276
1995
-
[34]
Graille, Approximation of mono-dimensional hyperbolic systems: A lattice Boltzmann scheme as a relaxation method, J
B. Graille, Approximation of mono-dimensional hyperbolic systems: A lattice Boltzmann scheme as a relaxation method, J. Comput. Phys. 266 (2014) 74–88
2014
-
[35]
F.Dubois,SimulationofstrongnonlinearwaveswithvectoriallatticeBoltzmannschemes,Internat.J.ModernPhys.C25(12)(2014)1441014
2014
-
[36]
Zhao, W.A
J. Zhao, W.A. Yong, Vectorial finite-difference-based lattice Boltzmann method: Consistency, boundary schemes and stability analysis, J. Comput. Appl. Math. 441 (2024) 115677
2024
-
[37]
Boolakee, M
O. Boolakee, M. Geier, L. De Lorenzis, Lattice Boltzmann for linear elastodynamics: Periodic problems and Dirichlet boundary conditions, Comput. Methods Appl. Mech. Engrg. 433 (2025) 117469. J. Feng and X. Chu:Preprint submitted to ElsevierPage 27 of 28 Total-Lagrangian vectorial LBM for hyperelasticity with curved boundaries
2025
-
[38]
Müller, E
H. Müller, E. Faust, A. Schlüter, R. Müller, Extending the lattice Boltzmann method to non-linear elastodynamics, Comput. Methods Appl. Mech. Engrg. 443 (2025) 118076
2025
-
[39]
J. Feng, X. Chu, A total-Lagrangian vectorial lattice Boltzmann method for finite-strain hyperelastic dynamics, arXiv:2605.26677, 2026. J. Feng and X. Chu:Preprint submitted to ElsevierPage 28 of 28
Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.