Theoretical Analysis of Diffusion Models for Radio Map Estimation with Ultra-low Sampling Rates
Pith reviewed 2026-06-25 20:47 UTC · model grok-4.3
The pith
Diffusion models for radio map estimation cannot achieve error below a bound set by mismatch between training distribution and true radio propagation law.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
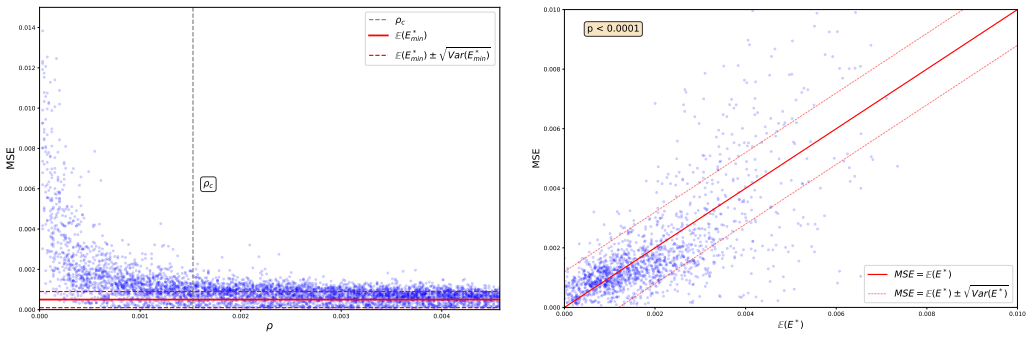
Radio map estimation is cast as non-linear matrix completion. A theoretical lower bound on the minimum estimation error of diffusion models is derived; this bound is set by the discrepancy between the deployment distribution and the true underlying radio propagation law. The bound is extended to include the effect of sampling sparsity, a critical sampling rate threshold for convergence is established, and empirical approximations of the bounds are proposed that use only observable data.
What carries the argument
The discrepancy between the deployment distribution and the true radio propagation law, which directly determines the lower bound on diffusion-model error inside the non-linear matrix completion formulation.
If this is right
- Estimation error of diffusion models is bounded from below by a term that grows with the mismatch between training and true propagation distributions.
- Ultra-low sampling rates add a further error component on top of the distribution-mismatch bound.
- Model performance converges to the lower bound only when the sampling rate exceeds a derived critical threshold.
- Observable-data approximations can be used in place of the theoretical bounds for practical performance prediction.
Where Pith is reading between the lines
- If the bound is tight, the same distribution-mismatch principle may limit other generative models applied to spatial field reconstruction tasks with mismatched training data.
- Measuring how the bound changes across different physical environments could test whether the discrepancy term behaves consistently with standard propagation models.
- Training diffusion models on synthetic data generated from a range of plausible propagation laws might lower the achievable error floor without altering the model itself.
Load-bearing premise
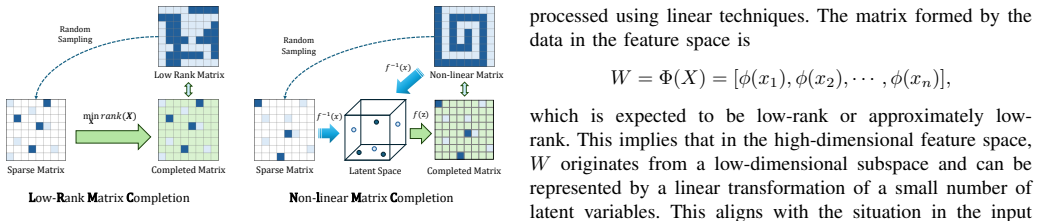
Radio map estimation can be treated as a non-linear matrix completion problem whose error is controlled by a fixed but unknown true propagation law that differs from the distribution used to train the diffusion model.
What would settle it
An experiment in which measured estimation error of a trained diffusion model falls below the calculated lower bound (computed from the observed distribution discrepancy and sampling rate) would falsify the central claim.
Figures

read the original abstract
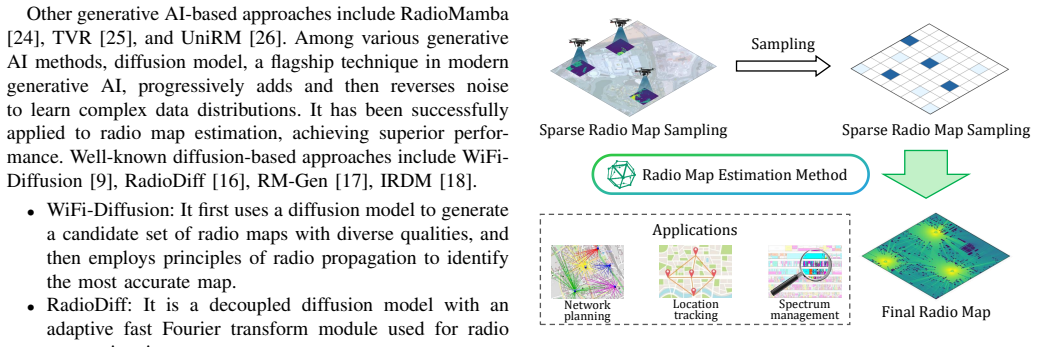
Radio maps, which characterize the spatial distribution of radio frequency metrics such as received signal strength, are essential for a wide range of wireless applications. The problem of radio map estimation involves constructing a radio map from sparse sensor measurements at multiple locations. This problem is particularly challenging due to ultra-low sampling rates, where available sensor measurements are far fewer than the high resolution requirement of radio maps to be estimated. Recently, diffusion models have been increasingly adopted for this problem, yet its theoretical performance remains unexamined. This paper bridges this gap by formulating radio map estimation as a non-linear matrix completion problem. Based on this formulation, we first derive a theoretical lower bound on the minimum estimation error achievable by diffusion models, which is fundamentally governed by the discrepancy between the deployment distribution and the true underlying radio propagation law. We then extend this bound to incorporate the effect of sampling sparsity, capturing the additional error introduced by ultra-low sampling rates. Furthermore, we establish a critical sampling rate threshold necessary for diffusion models to achieve performance convergence. Finally, considering that the derived error bounds depend on certain information that is difficult to obtain in practice, we propose empirical approximations that are readily computable from observable data. Extensive simulations based on real-world traces demonstrate that these empirical formulas tightly approximate the theoretical error bounds, validating their effectiveness for practical deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates radio map estimation as a non-linear matrix completion problem. It derives a theoretical lower bound on the minimum estimation error achievable by diffusion models, governed by the discrepancy between the deployment distribution and the true underlying radio propagation law. The bound is extended to account for sampling sparsity, a critical sampling rate threshold for performance convergence is established, and empirical approximations computable from observable data are proposed and validated on real-world trace simulations.
Significance. If the bounds and approximations hold under the stated modeling assumptions, the work would supply the first theoretical performance characterization of diffusion models for radio map estimation at ultra-low sampling rates. This is relevant for wireless applications requiring spatial RF metric reconstruction from sparse sensors. The emphasis on observable-data approximations and real-trace validation is a constructive feature that could aid practical deployment.
major comments (2)
- [§3] §3 (lower-bound derivation): The central claim that the minimum error is governed by discrepancy between deployment distribution and a fixed unknown true radio propagation law presupposes that the true law is a well-defined deterministic object separable from the data-generating process. Radio propagation physics combines deterministic path loss with stochastic components (shadowing, multipath fading); the paper does not specify how the discrepancy measure is defined or remains meaningful when the true law is itself distributional. This assumption is load-bearing for the bound, the sparsity extension, and the critical threshold.
- [§4] §4 (sparsity extension and critical threshold): Both results inherit the fixed-law modeling choice from §3. If the base discrepancy cannot be rigorously defined under stochastic propagation, the claimed threshold and additional error term lack a clear interpretation for real environments.
minor comments (2)
- [§2] The non-linear matrix completion formulation is introduced without a concise definition or comparison to standard linear matrix completion; a short paragraph in §2 would improve accessibility.
- [§5] Notation for the discrepancy measure and the empirical approximations should be introduced with explicit dependence on observable quantities to make the transition from theory to practice clearer.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments below, clarifying the modeling choices and indicating planned revisions for precision.
read point-by-point responses
-
Referee: [§3] §3 (lower-bound derivation): The central claim that the minimum error is governed by discrepancy between deployment distribution and a fixed unknown true radio propagation law presupposes that the true law is a well-defined deterministic object separable from the data-generating process. Radio propagation physics combines deterministic path loss with stochastic components (shadowing, multipath fading); the paper does not specify how the discrepancy measure is defined or remains meaningful when the true law is itself distributional. This assumption is load-bearing for the bound, the sparsity extension, and the critical threshold.
Authors: In the manuscript the true radio propagation law denotes the deterministic path-loss function, while stochastic effects are folded into the data-generating distribution. The discrepancy is therefore a distributional divergence (e.g., KL or total variation) between the deployment distribution and the distribution induced by the law plus stochastic components. We agree that this distinction was stated too briefly. The revised §3 will explicitly define the discrepancy as a distributional quantity and show that the lower bound continues to hold when the true law is itself stochastic. revision: yes
-
Referee: [§4] §4 (sparsity extension and critical threshold): Both results inherit the fixed-law modeling choice from §3. If the base discrepancy cannot be rigorously defined under stochastic propagation, the claimed threshold and additional error term lack a clear interpretation for real environments.
Authors: Because the sparsity extension and threshold are obtained by adding a sampling-error term to the distributional discrepancy bound derived in §3, the same clarification applies. Once the discrepancy is defined between distributions, the critical sampling-rate threshold retains its meaning as the point at which further increases in sampling density cease to reduce total error below the irreducible mismatch floor. The revised §4 will restate the threshold and error term under this distributional interpretation. revision: yes
Circularity Check
No significant circularity; derivation is self-contained from matrix-completion formulation
full rationale
The paper formulates radio map estimation as non-linear matrix completion and derives lower bounds on diffusion model error from that setup, governed by discrepancy between deployment distribution and true propagation law. Empirical approximations are explicitly stated as computable from observable data. No quoted steps reduce a claimed prediction or bound to a fitted parameter or self-citation by construction. The derivation chain is independent of the target results and does not exhibit self-definitional, fitted-input, or load-bearing self-citation patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Radio map estimation can be formulated as a non-linear matrix completion problem
Reference graph
Works this paper leans on
-
[1]
Radio map estimation: A data-driven approach to spectrum cartography,
D. Romero and S.-J. Kim, “Radio map estimation: A data-driven approach to spectrum cartography,”IEEE Signal Processing Magazine, vol. 39, no. 6, pp. 53–72, 2022
2022
-
[2]
A blockchain-based distributed collaborative sensing and spectrum access approach for consumer electronics,
Y . Peng, Y . Li, Y . Guo, D. Zhang, F. Khan, R. Alturki, and B. Alshawi, “A blockchain-based distributed collaborative sensing and spectrum access approach for consumer electronics,”IEEE Transactions on Con- sumer Electronics, 2025, early access
2025
-
[3]
Joint optimization of user association, power control, and dynamic spectrum sharing for integrated aerial-terrestrial network,
A. S. Matar and X. Shen, “Joint optimization of user association, power control, and dynamic spectrum sharing for integrated aerial-terrestrial network,”IEEE Journal on Selected Areas in Communications, vol. 43, no. 1, pp. 396–409, 2025
2025
-
[4]
CSELM-QE: A composite semi-supervised extreme learning machine with unlabeled rss quality estimation for radio map construction,
J. ZHAOet al., “CSELM-QE: A composite semi-supervised extreme learning machine with unlabeled rss quality estimation for radio map construction,”Chinese Journal of Electronics, vol. 29, no. 6, pp. 1016– 1024, 2020
2020
-
[5]
Dynamic UA V-assisted cooperative edge AI inference,
J. Huang, L. Lian, D. Wen, Y . Zhou, F. Wang, W. Wang, and Y . Shi, “Dynamic UA V-assisted cooperative edge AI inference,”IEEE Transac- tions on Wireless Communications, vol. 24, no. 1, pp. 615–628, 2024
2024
-
[6]
RadioUNet: Fast radio map estimation with convolutional neural networks,
R. Levie, C ¸ . Yapar, G. Kutyniok, and G. Caire, “RadioUNet: Fast radio map estimation with convolutional neural networks,”IEEE Transactions on Wireless Communications, vol. 20, no. 6, pp. 4001–4015, 2021
2021
-
[7]
Radio map estimation with deep dual path autoencoders and skip connection learning,
W. Locke, N. Lokhmachev, Y . Huang, and X. Li, “Radio map estimation with deep dual path autoencoders and skip connection learning,” inProc. of IEEE PIMRC, Toronto, Canada, September 05-08, 2023
2023
-
[8]
RadioGAT: A joint model-based and data-driven framework for multi-band radiomap reconstruction via graph attention networks,
X. Li, S. Zhang, H. Li, X. Li, L. Xu, H. Xu, H. Mei, G. Zhu, N. Qi, and M. Xiao, “RadioGAT: A joint model-based and data-driven framework for multi-band radiomap reconstruction via graph attention networks,” IEEE Transactions on Wireless Communications, vol. 23, no. 11, pp. 1–1, 2024
2024
-
[9]
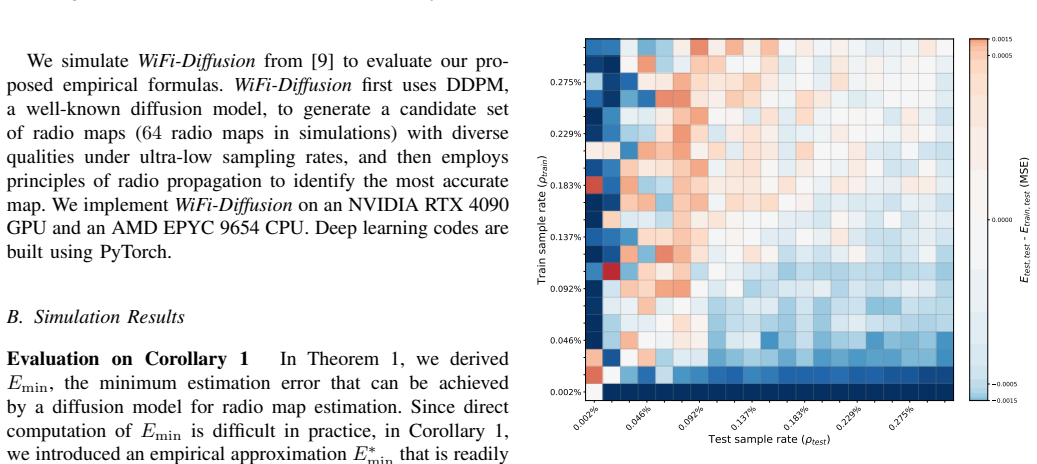
Wifi-diffusion: Achieving fine-grained wifi radio map estimation with ultra-low sam- pling rate by diffusion models,
Z. Liu, S. Zhang, Q. Liu, H. Zhang, and L. Song, “Wifi-diffusion: Achieving fine-grained wifi radio map estimation with ultra-low sam- pling rate by diffusion models,”IEEE Journal on Selected Areas in Communications, vol. 43, no. 11, pp. 3796–3812, 2025
2025
-
[10]
Two-dimensional ray-tracing modeling for propagation prediction in microcellular environments,
K. Rizk, J.-F. Wagen, and F. Gardiol, “Two-dimensional ray-tracing modeling for propagation prediction in microcellular environments,” IEEE Transactions on Vehicular Technology, vol. 46, no. 2, pp. 508–518, 1997
1997
-
[11]
Dominant path prediction model for urban scenarios,
R. Wahl, G. W ¨olfle, P. Wildbolz, and F. Landstorfer, “Dominant path prediction model for urban scenarios,” inProc. of IST Mobile and Wireless Communications, Dresden, Germany, June 19-23, 2005
2005
-
[12]
Toward standardization of millimeter-wave vehicle-to-vehicle networks: Open challenges and performance evaluation,
T. Zugno, M. Drago, M. Giordani, M. Polese, and M. Zorzi, “Toward standardization of millimeter-wave vehicle-to-vehicle networks: Open challenges and performance evaluation,”IEEE Communications Maga- zine, vol. 58, no. 9, pp. 79–85, 2020
2020
-
[13]
C. M. Bishop,Neural Networks for Pattern Recognition. New York, NY , USA: Oxford University Press, Inc., 1995
1995
-
[14]
Group-lasso on splines for spectrum cartography,
J. A. Bazerque, G. Mateos, and G. B. Giannakis, “Group-lasso on splines for spectrum cartography,”IEEE Transactions on Signal Processing, vol. 59, no. 10, pp. 4648–4663, 2011
2011
-
[15]
Wire- less sensor network for spectrum cartography based on kriging interpo- lation,
G. Boccolini, G. Hern ´andez-Pe˜naloza, and B. Beferull-Lozano, “Wire- less sensor network for spectrum cartography based on kriging interpo- lation,” inProc. of IEEE PIMRC, Sydney, Australia, September 09-12, 2012
2012
-
[16]
Radiodiff: An effective generative diffusion model for sampling-free dynamic radio map construction,
X. Wang, K. Tao, N. Cheng, Z. Yin, Z. Li, Y . Zhang, and X. Shen, “Radiodiff: An effective generative diffusion model for sampling-free dynamic radio map construction,”IEEE Transactions on Cognitive Communications and Networking, vol. 11, no. 2, pp. 738–750, 2025
2025
-
[17]
Denoising diffusion probabilistic model for radio map estimation in generative wireless networks,
X. Luo, Z. Li, Z. Peng, M. Chen, and Y . Liu, “Denoising diffusion probabilistic model for radio map estimation in generative wireless networks,”IEEE Transactions on Cognitive Communications and Net- working, vol. 11, no. 2, pp. 751–763, 2025
2025
-
[18]
IRDM: A generative diffusion model for indoor radio map interpolation,
K. Qiu, S. Bakirtzis, I. Wassell, H. Song, K. Lin, and J. Zhang, “IRDM: A generative diffusion model for indoor radio map interpolation,” in Proc. of IEEE Global Communications Conference, Kuala Lumpur, Malaysia, December 4–8, 2023
2023
-
[19]
Theoretical analysis of the radio map estimation problem,
D. Romero, T. N. Ha, R. Shrestha, and M. Franceschetti, “Theoretical analysis of the radio map estimation problem,”IEEE Transactions on Wireless Communications, vol. 23, no. 10, pp. 13 722–13 737, 2024
2024
-
[20]
K-nearest neighbors gaussian process regression for urban radio map reconstruction,
Y . Zhang and S. Wang, “K-nearest neighbors gaussian process regression for urban radio map reconstruction,”IEEE Communications Letters, vol. 26, no. 12, pp. 3049–3053, 2022
2022
-
[21]
Reliability of a radio environment map: Case of spatial interpolation techniques,
D. Denkovski, V . Atanasovski, L. Gavrilovska, J. Riihij ¨arvi, and P. M¨ah¨onen, “Reliability of a radio environment map: Case of spatial interpolation techniques,” in2012 7th International ICST Conference on Cognitive Radio Oriented Wireless Networks and Communications (CROWNCOM), 2012, pp. 248–253
2012
-
[22]
Collaboradio: A hybrid device-edge-cloud collaboration paradigm for fine-grained radio map construction,
S. Shao, L. Cheng, K. Chen, Q. Liu, S. Zhang, H. Zhang, and L. Song, “Collaboradio: A hybrid device-edge-cloud collaboration paradigm for fine-grained radio map construction,”IEEE Transactions on Mobile Computing, vol. 25, no. 1, pp. 599–613, 2026
2026
-
[23]
Rme-gan: A learning framework for radio map estimation based on conditional generative adversarial network,
S. Zhang, A. Wijesinghe, and Z. Ding, “Rme-gan: A learning framework for radio map estimation based on conditional generative adversarial network,”IEEE Internet of Things Journal, vol. 10, no. 20, pp. 18 016– 18 027, 2023
2023
-
[24]
Ra- dioMamba: Breaking the accuracy-efficiency trade-off in radio map construction via a hybrid mamba-unet,
H. Jia, N. Cheng, X. Wang, C. Zhou, R. Sun, and X. Shen, “Ra- dioMamba: Breaking the accuracy-efficiency trade-off in radio map construction via a hybrid mamba-unet,”IEEE Transactions on Network Science and Engineering, pp. 1–14, 2025
2025
-
[25]
Time-variant radio map reconstruction with optimized distributed sensors in dynamic spectrum environments,
Q. Gao, Q. Zhu, Z. Lin, P. T. Mathiopoulos, Y . Zhao, Y . Huang, J. Wang, and Q. Wu, “Time-variant radio map reconstruction with optimized distributed sensors in dynamic spectrum environments,”IEEE Internet of Things Journal, vol. 12, no. 12, pp. 20 927–20 941, 2025
2025
-
[26]
UniRM: A universal large model for multiband 3d radio map construction,
X. Jang, T. Li, Z. Xiao, K. Chen, S. Ma, Z. Wang, and K. Li, “UniRM: A universal large model for multiband 3d radio map construction,”IEEE Journal on Selected Areas in Communications, vol. 44, pp. 2244–2258, 2026
2026
-
[27]
Exact matrix completion via convex optimization,
E. J. Cand `es and B. Recht, “Exact matrix completion via convex optimization,”Foundations of Computational Mathematics, vol. 9, no. 6, pp. 717–772, Dec. 2009. [Online]. Available: https://doi.org/10. 1007/s10208-009-9045-5
2009
-
[28]
X. Su and T. M. Khoshgoftaar, “A survey of collaborative filtering techniques,”Advances in Artificial Intelligence, vol. 2009, no. 1, p. 421425, 2009. [Online]. Available: https://onlinelibrary.wiley.com/doi/ abs/10.1155/2009/421425
-
[29]
Annihilating filter-based low-rank hankel matrix approach for image inpainting,
K. H. Jin and J. C. Ye, “Annihilating filter-based low-rank hankel matrix approach for image inpainting,”IEEE Transactions on Image Processing, vol. 24, no. 11, pp. 3498–3511, 2015
2015
-
[30]
Multi-label low-dimensional embedding with missing labels,
J. Ma, Z. Tian, H. Zhang, and T. W. Chow, “Multi-label low-dimensional embedding with missing labels,”Knowledge-Based Systems, vol. 137, pp. 65–82, 2017. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0950705117304136
2017
-
[31]
Low-rank matrix completion: A contemporary survey,
L. T. Nguyen, J. Kim, and B. Shim, “Low-rank matrix completion: A contemporary survey,”IEEE Access, vol. 7, pp. 94 215–94 237, 2019
2019
-
[32]
Non-linear matrix completion,
J. Fan and T. W. Chow, “Non-linear matrix completion,”Pattern Recognition, vol. 77, pp. 378–394, 2018. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0031320317304028
2018
-
[33]
Matrix completion by deep matrix factorization,
J. Fan and J. Cheng, “Matrix completion by deep matrix factorization,” Neural Networks, vol. 98, pp. 34–41, 2018. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0893608017302502
2018
-
[34]
Goal-directed inductive matrix completion,
S. Si, K.-Y . Chiang, C.-J. Hsieh, N. Rao, and I. S. Dhillon, “Goal-directed inductive matrix completion,” inProceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, ser. KDD ’16. New York, NY , USA: Association for Computing Machinery, 2016, p. 1165–1174. [Online]. Available: https://doi.org/10.1145/2939672.2939809
-
[35]
Score-based generative modeling through stochastic differential equations,
Y . Song, J. Sohl-Dickstein, D. P. Kingma, A. Kumar, S. Ermon, and B. Poole, “Score-based generative modeling through stochastic differential equations,” inInternational Conference on Learning Representations, 2021. [Online]. Available: https://openreview.net/ forum?id=PxTIG12RRHS
2021
-
[36]
doi:10.1007/978-3-642-14394-6 , year=
B. Øksendal,Stochastic Differential Equations. Berlin, Heidelberg: Springer Berlin Heidelberg, 2003, pp. 65–84. [Online]. Available: https://doi.org/10.1007/978-3-642-14394-6 5
-
[37]
Reverse-time diffusion equation models,
B. D. Anderson, “Reverse-time diffusion equation models,”Stochastic Processes and their Applications, vol. 12, no. 3, pp. 313–326, 1982. [Online]. Available: https://www.sciencedirect.com/science/article/pii/ 0304414982900515
1982
-
[38]
Generative modeling by estimating gradients of the data distribution,
Y . Song and S. Ermon, “Generative modeling by estimating gradients of the data distribution,” inAdvances in Neural Information Processing Systems, 2019, pp. 11 895–11 907
2019
-
[39]
Generative modeling by estimating gradients of the data distri- bution,
——, “Generative modeling by estimating gradients of the data distri- bution,” inAdvances in Neural Information Processing Systems, 2019, pp. 11 895–11 907
2019
-
[40]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,” inProc. of NeurIPS, virtual only conference, December 06-12, 2020
2020
-
[41]
Convergence of denoising diffusion models under the manifold hypothesis,
V . D. Bortoli, “Convergence of denoising diffusion models under the manifold hypothesis,”Transactions on Machine Learning Research, 2022, expert Certification. [Online]. Available: https://openreview.net/ forum?id=MhK5aXo3gB
2022
-
[42]
On the asymptotic mean square error optimality of diffusion models,
B. Fesl, B. B ¨ock, F. Strasser, M. Baur, M. Joham, and W. Utschick, “On the asymptotic mean square error optimality of diffusion models,” inProceedings of The 28th International Conference on Artificial Intelligence and Statistics, ser. Proceedings of Machine Learning Research, Y . Li, S. Mandt, S. Agrawal, and E. Khan, Eds., vol
-
[43]
PMLR, 03–05 May 2025, pp. 505–513. [Online]. Available: https://proceedings.mlr.press/v258/fesl25a.html
2025
-
[44]
J. D. Gibson,Rate Distortion Theory. Cham: Springer Nature Switzerland, 2025, pp. 77–92. [Online]. Available: https://doi.org/10. 1007/978-3-031-65388-9 12
2025
-
[45]
Gans trained by a two time-scale update rule converge to a local nash equilibrium,
M. Heusel, H. Ramsauer, T. Unterthiner, B. Nessler, and S. Hochreiter, “Gans trained by a two time-scale update rule converge to a local nash equilibrium,” inAdvances in Neural Information Processing Systems, I. Guyon, U. V . Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett, Eds., vol. 30. Curran Associates, Inc., 2017. [Online]....
2017
-
[46]
A kernel two-sample test,
A. Gretton, K. M. Borgwardt, M. J. Rasch, B. Sch ¨olkopf, and A. Smola, “A kernel two-sample test,”J. Mach. Learn. Res., vol. 13, no. 1, p. 723–773, Mar. 2012
2012
-
[47]
Radiomap inpainting for restricted areas based on propagation priority and depth map,
S. Zhang, T. Yu, B. Choi, F. Ouyang, and Z. Ding, “Radiomap inpainting for restricted areas based on propagation priority and depth map,”IEEE Transactions on Wireless Communications, vol. 23, no. 8, pp. 9330– 9344, 2024
2024
-
[48]
[Online]
Altair,Altair WinProp 2021 Documentation, Altair, Troy, Michigan, USA, 2021, Accessed: 2024-12-02. [Online]. Available: https://2021. help.altair.com/2021/winprop/index.htm
2021
-
[49]
OpenStreetMap,
OpenStreetMap Contributor Terms, “OpenStreetMap,” https://www. openstreetmap.org/, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.