Automated Reasoning with Nested Datatypes
Pith reviewed 2026-07-02 20:10 UTC · model grok-4.3
The pith
A decision procedure for the theory of nested datatypes is correct and complete.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
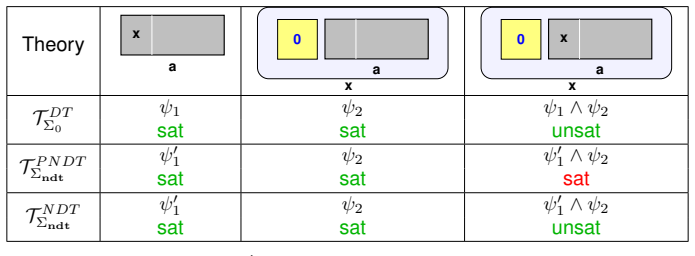
The theory of nested datatypes, formed by restricting the naive combination of datatypes and arrays to prevent non-standard models, admits a decision procedure that is proven correct.
What carries the argument
The restriction of the datatype-array combination that blocks non-standard models and enables the decision procedure.
If this is right
- The satisfiability of formulas over nested datatypes becomes decidable.
- Automated reasoning tools can handle nested data structures in verification tasks.
- Implementations can be evaluated against both practical and synthetic test cases.
Where Pith is reading between the lines
- Such a procedure might extend to other combinations of theories in SMT solvers.
- Verification of recursive data types in programming languages could become more automated.
- Future work could relax the restriction while preserving decidability.
Load-bearing premise
The specific restriction on combining datatypes and arrays is what stops non-standard models from appearing.
What would settle it
A concrete formula over nested datatypes on which the procedure reports the wrong satisfiability status.
Figures



read the original abstract
We introduce a theory of nested datatypes. The theory is obtained by restricting the naive combination of datatypes and arrays, so as to prevent non-standard models from emerging. A decision procedure for the theory is given and proven correct. Finally, we describe an implementation of the procedure, as well as an evaluation over both real-world and crafted benchmarks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a theory of nested datatypes obtained by restricting the naive combination of datatypes and arrays in order to prevent non-standard models. It presents a decision procedure for the resulting theory together with a proof of correctness, describes an implementation of the procedure, and reports an evaluation on both real-world and crafted benchmarks.
Significance. If the restriction indeed yields only standard models and the decision procedure is sound and complete for them, the work would supply a practical automated-reasoning tool for data structures that involve nesting (e.g., lists of lists or trees), which appear frequently in program verification. The combination of a proved procedure with an implementation and benchmark evaluation strengthens the contribution.
major comments (1)
- [Abstract, §2] Abstract and §2 (Theory): the manuscript states that the restriction is introduced 'so as to prevent non-standard models from emerging,' yet provides no model-theoretic lemma, invariant, or theorem establishing that every model of the restricted signature is well-founded or isomorphic to the intended inductive interpretation. This semantic claim is load-bearing for the subsequent assertion that the decision procedure is correct for the theory of nested datatypes.
minor comments (1)
- [Evaluation] The evaluation section would benefit from a clearer description of how the crafted benchmarks were generated and whether they exercise the nesting depth that the restriction is intended to control.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract, §2] Abstract and §2 (Theory): the manuscript states that the restriction is introduced 'so as to prevent non-standard models from emerging,' yet provides no model-theoretic lemma, invariant, or theorem establishing that every model of the restricted signature is well-founded or isomorphic to the intended inductive interpretation. This semantic claim is load-bearing for the subsequent assertion that the decision procedure is correct for the theory of nested datatypes.
Authors: We agree that the manuscript would be strengthened by an explicit model-theoretic result. The restriction is defined syntactically to exclude combinations known to admit non-standard models, and the decision-procedure correctness proof is carried out directly in the restricted theory; however, no separate lemma is stated that every model of the restricted signature is well-founded or standard. In the revised version we will insert a short lemma (new Lemma 2.3) in §2 establishing that every model is isomorphic to the intended inductive interpretation, together with a brief proof sketch. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper defines a new theory of nested datatypes via an explicit restriction on the datatype+array combination, states a decision procedure for that theory, and claims an independent proof of correctness. No step reduces by construction to its inputs, no self-citation is load-bearing for the central claim, and no fitted parameter or ansatz is renamed as a prediction. The derivation therefore stands on its own definitions and proof rather than collapsing into the inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
M. Preiner, H.-J. Schurr, C. Barrett, P. Fontaine, A. Niemetz, C. Tinelli, SMT-LIB release 2025 (non-incremental benchmarks), Zenodo, 2025. URL: https://zenodo.org/records/15493090. doi:10. 5281/zenodo.15493090, version 2025.05.22
-
[2]
Barbosa, C
H. Barbosa, C. Barrett, M. Brain, G. Kremer, H. Lachnitt, M. Mann, A. Mohamed, M. Mohamed, A. Niemetz, A. Nötzli, A. Ozdemir, M. Preiner, A. Reynolds, Y . Sheng, C. Tinelli, Y . Zohar, cvc5: A versatile and industrial-strength SMT solver, in: Tools and Algorithms for the Construction and Analysis of Systems (TACAS), Springer, 2022
2022
-
[3]
J. E. Zhong, K. Cheang, S. Qadeer, W. Grieskamp, S. Blackshear, J. Park, Y . Zohar, C. W. Barrett, D. L. Dill, The Move Prover, in: CA V , 2020
2020
-
[4]
L. M. de Moura, N. S. Bjørner, Z3: an efficient SMT solver, in: C. R. Ramakrishnan, J. Rehof (Eds.), Tools and Algorithms for the Construction and Analysis of Systems, 14th International Conference, TACAS 2008, Held as Part of the Joint European Conferences on Theory and Practice of Software, ETAPS 2008, Budapest, Hungary, March 29-April 6, 2008. Proceedi...
-
[5]
doi:10.1007/978-3-540-78800-3\_24
-
[6]
Barrett, P
C. Barrett, P. Fontaine, C. Tinelli, The SMT-LIB Standard: Version 2.6, Technical Report, Depart- ment of Computer Science, The University of Iowa, 2017. Available atwww.SMT-LIB.org
2017
-
[7]
C. W. Barrett, I. Shikanian, C. Tinelli, An abstract decision procedure for a theory of inductive data types, Journal on Satisfiability, Boolean Modeling and Computation 3 (2007) 21–46
2007
-
[8]
D. C. Oppen, Reasoning about recursively defined data structures, J. ACM 27 (1980) 403–411. URL: http://doi.acm.org/10.1145/322203.322204. doi:10.1145/322203.322204
-
[9]
A. Shah, F. Mora, S. A. Seshia, An eager satisfiability modulo theories solver for algebraic datatypes, in: M. J. Wooldridge, J. G. Dy, S. Natarajan (Eds.), Thirty-Eighth AAAI Conference on Artificial Intelligence, AAAI 2024, Thirty-Sixth Conference on Innovative Applications of Artificial Intelligence, IAAI 2024, Fourteenth Symposium on Educational Advan...
-
[10]
H. B. Enderton, A mathematical introduction to logic, Academic Press, 2001
2001
-
[11]
Tinelli, C
C. Tinelli, C. G. Zarba, Combining decision procedures for sorted theories, in: J. J. Alferes, J. A. Leite (Eds.), Logics in Artificial Intelligence, 9th European Conference, JELIA 2004, Lisbon, Portugal, September 27-30, 2004, Proceedings, volume 3229 ofLecture Notes in Computer Science, Springer, 2004, pp. 641–653
2004
-
[12]
A. R. Bradley, Z. Manna, The Calculus of Computation: Decision Procedures with Applications to Verification, Springer, 2007
2007
-
[13]
Sheng, Y
Y . Sheng, Y . Zohar, C. Ringeissen, J. Lange, P. Fontaine, C. W. Barrett, Polite combination of algebraic datatypes, J. Autom. Reason. 66 (2022) 331–355
2022
-
[14]
Meinke, J
K. Meinke, J. V . Tucker, Universal algebra (1992)
1992
-
[15]
G. Nelson, D. C. Oppen, Simplification by cooperating decision procedures, ACM Trans. Pro- gram. Lang. Syst. 1 (1979) 245–257. URL: https://doi.org/10.1145/357073.357079. doi:10.1145/ 357073.357079
-
[16]
Blackshear, N
S. Blackshear, N. Vasilakis, et al., Move: A language with programmable resources, in: Proceedings of the ACM SIGPLAN Conference on Programming Language Design and Implementation (PLDI), 2019
2019
-
[17]
Barnett, B
M. Barnett, B. E. Chang, R. DeLine, B. Jacobs, K. R. M. Leino, Boogie: A modular reusable verifier for object-oriented programs, in: Formal Methods for Components and Objects (FMCO), volume 4111 ofLecture Notes in Computer Science, Springer, 2006, pp. 364–387
2006
-
[18]
Commit ac0b70a656bfb63eb7e569444b7a3a5ed318d6de
Libra / Diem Team, Libra move prover, https://github.com/libra/libra, accessed 2026. Commit ac0b70a656bfb63eb7e569444b7a3a5ed318d6de
2026
-
[19]
Commit 044e533713346840b55e53c33082911fd077d299
Boogie Team, Boogie verifier, https://github.com/boogie-org/boogie, accessed 2026. Commit 044e533713346840b55e53c33082911fd077d299. 14
2026
-
[20]
Jovanovi´c, C
D. Jovanovi´c, C. Barrett, Polite Theories Revisited, Technical Report TR2010-922, New York University, 2010
2010
-
[21]
Jovanovic, C
D. Jovanovic, C. W. Barrett, Polite theories revisited, in: C. G. Fermüller, A. V oronkov (Eds.), Logic for Programming, Artificial Intelligence, and Reasoning - 17th International Conference, LPAR-17, Yogyakarta, Indonesia, October 10-15, 2010. Proceedings, volume 6397 ofLecture Notes in Computer Science, Springer, 2010, pp. 402–416. Extended technical r...
2010
-
[22]
Tinelli, C
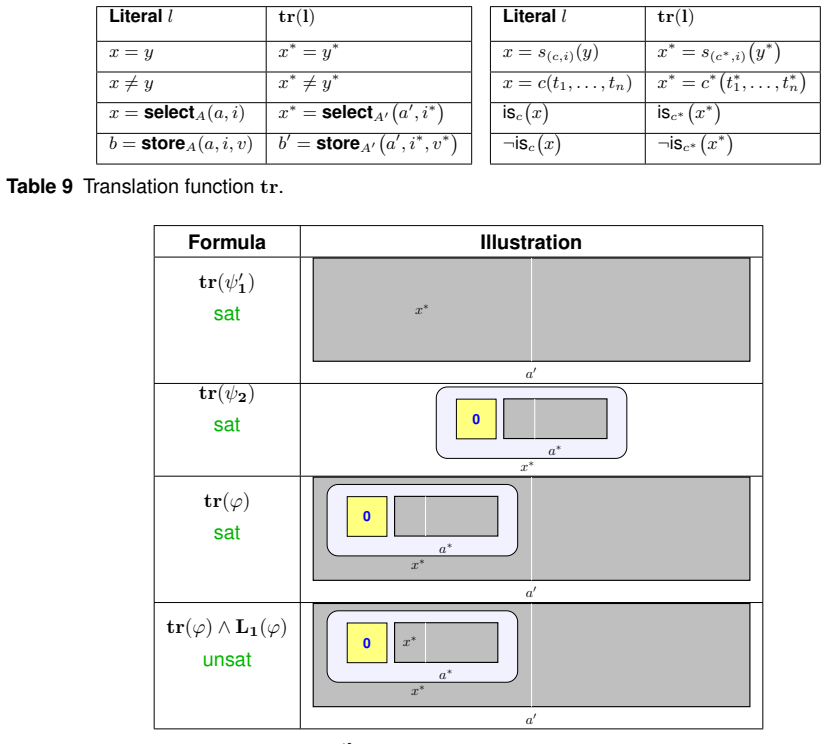
C. Tinelli, C. G. Zarba, Combining decision procedures for sorted theories, in: Logics in Artificial Intelligence, 9th European Conference, JELIA 2004, Lisbon, Portugal, September 27-30, 2004, Proceedings, volume 3229 ofLecture Notes in Computer Science, Springer, 2004, pp. 641–653. 15 𝜓 𝑥=select(𝑎, 𝑗)∧𝑦=c(𝑘, 𝑎) trF ormula(𝜓) 𝑥* =select(𝑎 ′, 𝑗*)∧𝑦 * =c *(...
2004
-
[23]
identifier
If 𝜎=𝐴 𝑖∘ for some 𝑖∈[1, 𝑛] then 𝜎 is interpreted in ℬ exactly in the same way 𝐴𝑖 is interpreted in𝒜. Intuitively, this means that the “identifier" of each array is itself
-
[24]
If 𝜏 is neither in StructΣ𝑛+1 nor in ArrayΣ, then 𝜏 * /∈StructΣ𝜑 𝑛+1 and we interpret 𝜏 * in ℬ in the same way 𝜏 is interpreted in 𝒜
If 𝜎=𝜏 * for some sort 𝜏, there are two sub-cases. If 𝜏 is neither in StructΣ𝑛+1 nor in ArrayΣ, then 𝜏 * /∈StructΣ𝜑 𝑛+1 and we interpret 𝜏 * in ℬ in the same way 𝜏 is interpreted in 𝒜. Otherwise, 𝜏 is in ArrayΣ, or in StructΣ𝑛+1, and thus 𝜏 * ∈Struct Σ𝜑 𝑛+1 , and we interpret 𝜏 * in ℬ as the set of trees defined in Definition 5
-
[25]
Example 38
If𝜎=𝐴 ′ 𝑖 for some𝑖∈[1, 𝑛], we interpret𝐴 ′ 𝑖 inℬas the set of functions from𝐼 * 𝑖 ℬ to𝐸 * 𝑖 ℬ. Example 38. Consider the formula 𝜓 and its satisfying interpretation 𝒜0 from Example 36. The sorts of Σ𝜓 ndt are interpreted inℬ 0 as described in Table 15. A.2. Interpretation of the Variables In order to define the interpretation of the variables, we define t...
-
[26]
, 𝑠𝑚) and 𝑡2 = ^𝑐(𝑟1,
If𝜎∈Struct Σ𝑛+1, then there are two options: (a) If 𝑡1 =𝑐(𝑠 1, . . . , 𝑠𝑚) and 𝑡2 = ^𝑐(𝑟1, . . . , 𝑟𝑘) with 𝑐̸= ^𝑐, then according to Remark 44, we have ΓDT(𝑡1) =𝑐 *(. . .)̸= ^𝑐 *(. . .) = Γ DT(𝑡2), since distinct constructors yield disjoint images. (b) Otherwise both use the same constructor 𝑐, say 𝑡1 =𝑐(𝑠 1, . . . , 𝑠𝑚) and 𝑡2 =𝑐(𝑟 1, . . . , 𝑟𝑚), but 𝑡...
-
[27]
intended
If𝜎=𝐴 𝑗 ∈Array Σ, then ΓDT(𝑡1) =𝑐 𝑗 (︀ 𝑡1, . . . )︀ ̸=𝑐 𝑗 (︀ 𝑡2, . . . )︀ = ΓDT(𝑡2) □ We can now define the function ΓArr that will be used to define the interpretation of some of the variables intrF ormula(𝜑). A.2.2. DefiningΓ Arr We define a function ΓArr : ⋃︀𝑛 𝑖=1 𝐴𝒜 𝑖 → ⋃︀𝑛 𝑖=1 𝐴′ℬ 𝑖 as follows: for each 𝑡∈𝐴 𝒜 𝑗 (with 𝑗∈[1, 𝑛] ), ΓArr(𝑡)∈𝐴 ′ℬ 𝑗 =𝐼 * 𝑗...
-
[28]
Theselect 𝐴′ 𝑖 andstore 𝐴′ 𝑖 functions are interpreted in the usual way for every𝑖∈[1, 𝑛]. Proof: W.l.o.g., we can assume that the domains in ℬ of all the sorts in 𝒮Σ𝜑 ∖(Struct Σ𝜑 𝑛+1 ∪Array Σ𝜑) are completely fresh and flat (i.e., they in particular do not contain any constructor symbols in them, or more specifically, we may assume that they are “copies"...
-
[29]
We define the domains of the sorts in𝒞
-
[30]
We define the interpretations of the symbols in𝒞
-
[31]
We show that𝒞is a𝑇 𝜑 new-interpretation
-
[32]
We show that every literal in𝜑is satisfied by𝒞
-
[33]
Let there be 𝜎∈ 𝒮 Σ𝜑
Defining the domains.The domains of the sorts in Σ𝜑 are defined in Table 20. Let there be 𝜎∈ 𝒮 Σ𝜑. We have three cases to consider:
-
[34]
Otherwise, we add infinitely many fresh elements to it, denoted as{𝑒 𝐴𝑖∘ 𝑘 |𝑘∈N}
If 𝜎=𝐴 𝑖∘ for some 𝑖∈[1, 𝑛] then 𝜎 is interpreted in 𝒞 exactly in the same way it is interpreted in ℬ if its domain is already infinite. Otherwise, we add infinitely many fresh elements to it, denoted as{𝑒 𝐴𝑖∘ 𝑘 |𝑘∈N}
-
[35]
a) If 𝜏 is neither in StructΣ𝑛+1 nor in ArrayΣ, then according to Table 5, 𝜏 * /∈StructΣ𝜑 𝑛+1
If𝜎=𝜏 * for some sort𝜏, there are two sub-cases. a) If 𝜏 is neither in StructΣ𝑛+1 nor in ArrayΣ, then according to Table 5, 𝜏 * /∈StructΣ𝜑 𝑛+1 . We want to make sure that the cardinality of𝜏 *𝒞 is infinite, so if𝜏 *ℬ is finite, we add infinitely many fresh elements to it, denoted as {𝑒𝜏 * 𝑘 |𝑘∈N} . If 𝜏 *ℬ is already infinite, we simply set 𝜏 *𝒞 =𝜏 *ℬ. b)...
-
[36]
By Lemma 55 we have∀𝜎∈ 𝒮 Σ.𝜎*ℬ ⊆𝜎 *𝒞
If𝜎=𝐴 ′ 𝑖 for some𝑖∈[1, 𝑛], we interpret𝐴 ′ 𝑖 in𝒞as the set of functions from𝐼 * 𝑖 𝒞 to𝐸 * 𝑖 𝒞. By Lemma 55 we have∀𝜎∈ 𝒮 Σ.𝜎*ℬ ⊆𝜎 *𝒞
-
[37]
We also create for every 𝑖∈[1, 𝑛] a mapping Ψ𝑖 :𝐴 ′ℬ 𝑖 →𝐴 ′𝒞 𝑖
Defining the interpretation of the variables.For every 𝜎∈ 𝒮 Σ𝜑, we choose an arbitrary elementd 𝜎 ∈𝜎 𝒞. We also create for every 𝑖∈[1, 𝑛] a mapping Ψ𝑖 :𝐴 ′ℬ 𝑖 →𝐴 ′𝒞 𝑖 . Let there be 𝑥∈𝐴 ′ℬ 𝑖 . Note that 𝐴′𝒞 𝑖 is the set of functions from𝐼 * 𝑖 𝒞 to𝐸 * 𝑖 𝒞, and thus we can defineΨ 𝑖(𝑥) :𝐼 * 𝑖 𝒞 →𝐸 * 𝑖 𝒞 in the following way: ∀𝑗∈𝐼 * 𝑖 𝒞.Ψ𝑖(𝑥)(𝑗) = {︃ selectℬ...
-
[38]
For every array variable𝑎of sort𝐴 ′ 𝑖, we set𝑎 𝒞 = Ψ𝑖(𝑎ℬ)
-
[39]
This is well defined since we have shown that∀𝜎∈ 𝒮 Σ.𝜎*ℬ ⊆𝜎 *𝒞
For every variable of any other sort (𝒮Σ𝜑 ∖Array Σ𝜑) , we set 𝑥𝒞 =𝑥 ℬ. This is well defined since we have shown that∀𝜎∈ 𝒮 Σ.𝜎*ℬ ⊆𝜎 *𝒞
-
[40]
Defining the interpretation of the functions and predicates.The function symbols in 𝒞 are interpreted as follows:
-
[41]
For every𝑖∈[1, 𝑛], theselect 𝐴′ 𝑖 function symbol is interpreted as select𝒞 𝐴′ 𝑖 (𝑎, 𝑗) =𝑎(𝑗)
-
[42]
For every𝑖∈[1, 𝑛], thestore 𝐴′ 𝑖 function symbol is interpreted as store𝒞 𝐴′ 𝑖 (𝑎, 𝑗, 𝑣)(𝑘) = {︃ 𝑣if𝑘=𝑗 𝑎(𝑘)otherwise
-
[43]
The constructor symbols are interpreted according to the datatype theory
-
[44]
, 𝑡𝑛) 𝑠ℬ (𝑐,𝑖)(𝑥)otherwise, if𝑥∈𝜎 *ℬ d𝜏 * otherwise Note that this function is well defined since𝜏 *ℬ ⊆𝜏 *𝒞 and thus𝑠 ℬ (𝑐,𝑖)(𝑥)∈𝜏 *𝒞 when𝑥∈𝜎 *ℬ
The selector symbols are interpreted as follows (𝑠 (𝑐,𝑖) :𝜎 * →𝜏 * when𝜎, 𝜏∈ 𝒮 Σ): 𝑠𝒞 (𝑐,𝑖)(𝑥) = ⎧ ⎪⎨ ⎪⎩ 𝑡𝑖 if𝑥=𝑐(𝑡 1, . . . , 𝑡𝑛) 𝑠ℬ (𝑐,𝑖)(𝑥)otherwise, if𝑥∈𝜎 *ℬ d𝜏 * otherwise Note that this function is well defined since𝜏 *ℬ ⊆𝜏 *𝒞 and thus𝑠 ℬ (𝑐,𝑖)(𝑥)∈𝜏 *𝒞 when𝑥∈𝜎 *ℬ
-
[45]
Thus, we have thatΨ 𝑖(𝑓 ℬ 𝐴𝑖(𝑥))∈𝐴 ′𝒞 𝑖 for every𝑥∈𝐴 * 𝑖 ℬ
For every function symbol𝑓 𝐴𝑖 of arity𝐴 * 𝑖 →𝐴 ′ 𝑖, we define: 𝑓 𝒞 𝐴𝑖(𝑥) = {︃ Ψ𝑖(𝑓 ℬ 𝐴𝑖(𝑥))if𝑥∈𝐴 * 𝑖 ℬ d𝐴′ 𝑖 otherwise Note that this function is well defined since 𝑓 ℬ 𝐴𝑖 :𝐴 * 𝑖 ℬ →𝐴 ′ℬ 𝑖 and Ψ𝑖 :𝐴 ′ℬ 𝑖 →𝐴 ′𝒞 𝑖 . Thus, we have thatΨ 𝑖(𝑓 ℬ 𝐴𝑖(𝑥))∈𝐴 ′𝒞 𝑖 for every𝑥∈𝐴 * 𝑖 ℬ
-
[46]
Note that this function is well defined
For every function symbol𝑔 𝐴𝑖 of arity𝐴 ′ 𝑖 →𝐴 * 𝑖 , we set 𝑔𝒞 𝐴𝑖(𝑥) = {︃ 𝑔ℬ 𝐴𝑖(Ψ−1 𝑖 (𝑥))ifΨ −1 𝑖 (𝑥)̸=∅ d𝐴* 𝑖 otherwise . Note that this function is well defined. First, we have already shown that Ψ𝑖 is injective, so Ψ−1 𝑖 (𝑥) contains a single element, if any. Second, sinceΨ𝑖 :𝐴 ′ℬ 𝑖 →𝐴 ′𝒞 𝑖 , we know that the restricted inverse Ψ−1 𝑖 ↾{𝑦∈𝐴′𝒞 𝑖 |Ψ−1 𝑖 ...
-
[47]
) 𝑓 𝑎𝑙𝑠𝑒otherwise By the way 𝒞 interprets the select𝐴′ 𝑗 and store𝐴′ 𝑗 for every 𝑗∈[1, 𝑛] , we get that 𝒞Σ* 𝑗 is an array Σ* 𝑗-structure
The tester symbols are interpreted in the standard way for datatype structors: ∀𝑐∈ 𝒞𝒪 Σ𝜑.is 𝒞 𝑐 (𝑥) = {︃ 𝑡𝑟𝑢𝑒if𝑥=𝑐(. . .) 𝑓 𝑎𝑙𝑠𝑒otherwise By the way 𝒞 interprets the select𝐴′ 𝑗 and store𝐴′ 𝑗 for every 𝑗∈[1, 𝑛] , we get that 𝒞Σ* 𝑗 is an array Σ* 𝑗-structure. Likewise,𝒞 Σ𝜑 is a datatypeΣ 𝜑-structure. 29
-
[48]
For each 𝑗∈[1, 𝑛] , the reduct 𝒞Σ* 𝑗 interprets select𝐴′ 𝑗 and store𝐴′ 𝑗 in the standard way for an arrays structure
Showing that 𝒞 is a 𝑇 𝜑 new-interpretation.Recall that 𝑇 𝜑 new = (︁⨄︀𝑛 𝑗=1 𝑇 * 𝑗 )︁ ⊎𝑇 𝜑 𝑛+1 ⊎𝑇 𝑛+2 . For each 𝑗∈[1, 𝑛] , the reduct 𝒞Σ* 𝑗 interprets select𝐴′ 𝑗 and store𝐴′ 𝑗 in the standard way for an arrays structure. On Σ𝜑 𝑛+1, 𝒞 uses the usual tree-based interpretation of constructors, selectors and testers (see Definition 6). By construction, each se...
-
[49]
Suppose ℬ satisfies ℓ
Showing that 𝒞 satisfies every literal in 𝜑.Let ℓ be a literal in 𝜑. Suppose ℬ satisfies ℓ. We prove𝒞satisfies it, by considering all of its possible shapes
-
[50]
b) If the sort of𝑥and𝑦is not𝐴 ′ 𝑖, then we have that 𝑥𝒞 =𝑥 ℬ =𝑦 ℬ =𝑦 𝒞
For a literal of the form𝑥=𝑦, there are two cases: a) If the sort of𝑥and𝑦is𝐴 ′ 𝑖, then: 𝑥𝒞 = Ψ𝑖(𝑥ℬ) = Ψ𝑖(𝑦ℬ) =𝑦 𝒞. b) If the sort of𝑥and𝑦is not𝐴 ′ 𝑖, then we have that 𝑥𝒞 =𝑥 ℬ =𝑦 ℬ =𝑦 𝒞
-
[51]
b) If the sort of𝑥and𝑦is not𝐴 ′ 𝑖, then we have that 𝑥𝒞 =𝑥 ℬ ̸=𝑦 ℬ =𝑦 𝒞
For a literal of the form𝑥̸=𝑦, there are two cases: a) If the sort of𝑥and𝑦is𝐴 ′ 𝑖, the injectivity ofΨ 𝑖 ensures that: 𝑥𝒞 = Ψ𝑖(𝑥ℬ)̸= Ψ 𝑖(𝑦ℬ) =𝑦 𝒞. b) If the sort of𝑥and𝑦is not𝐴 ′ 𝑖, then we have that 𝑥𝒞 =𝑥 ℬ ̸=𝑦 ℬ =𝑦 𝒞
-
[52]
The first equality holds since 𝑥∈vars 𝐸𝑖(𝜓) and thus 𝑥𝒞 =𝑥 ℬ
For a literal of the form𝑥=select 𝐴′ 𝑖 (𝑎, 𝑗), we have that 𝑥𝒞 =𝑥 ℬ =select ℬ 𝐴′ 𝑖 (𝑎ℬ, 𝑗ℬ) =𝑎 𝒞(𝑗𝒞) =select 𝒞 𝐴′ 𝑖 (𝑎𝒞, 𝑗𝒞). The first equality holds since 𝑥∈vars 𝐸𝑖(𝜓) and thus 𝑥𝒞 =𝑥 ℬ. The second equality holds because ℬ satisfies the literal𝑥=select 𝐴′ 𝑖 (𝑎, 𝑗). The third equality holds by the definition of array variables in𝒞. The fourth equality hol...
-
[53]
Thus: a)select ℬ 𝐴′ 𝑖 (𝑏ℬ, 𝑖ℬ) =𝑣 ℬ
For a literal of the form𝑏=store 𝐴′ 𝑖 (𝑎, 𝑖, 𝑣), we already know that 𝑏ℬ =store ℬ 𝐴′ 𝑖 (𝑎ℬ, 𝑖ℬ, 𝑣ℬ). Thus: a)select ℬ 𝐴′ 𝑖 (𝑏ℬ, 𝑖ℬ) =𝑣 ℬ. b)∀𝑘∈𝐼 * 𝑖 ℬ ∖ {𝑖ℬ}.selectℬ 𝐴′ 𝑖 (𝑏ℬ, 𝑘) =select ℬ 𝐴′ 𝑖 (𝑎ℬ, 𝑘). Let there be 𝑘∈𝐼 * 𝑖 𝒞. Since, 𝐼𝑖 ∈ 𝒮 Σ ∖(Struct∪Array) , we have that 𝐼 * 𝑖 ℬ ⊆𝐼 * 𝑖 𝒞. Hence, 𝐼 * 𝑖 𝒞 ={𝑖 𝒞} ∪(𝐼 * 𝑖 ℬ ∖ {𝑖𝒞})∪(𝐼 * 𝑖 𝒞 ∖𝐼 * 𝑖 ℬ)and sin...
-
[54]
, 𝑥𝑛), we have that 𝑦𝒞 =𝑦 ℬ =𝑐 ℬ(𝑥ℬ 1 ,
For a literal of the form𝑦=𝑐(𝑥 1, . . . , 𝑥𝑛), we have that 𝑦𝒞 =𝑦 ℬ =𝑐 ℬ(𝑥ℬ 1 , . . . , 𝑥ℬ 𝑛) =𝑐 𝒞(𝑥𝒞 1 , . . . , 𝑥𝒞 𝑛)
-
[55]
For a literal of the form𝑥=𝑠 (𝑐,𝑖)(𝑦), we have that 𝑥𝒞 =𝑥 ℬ =𝑠 ℬ (𝑐,𝑖)(𝑦ℬ) =𝑠 𝒞 (𝑐,𝑖)(𝑦𝒞)
-
[56]
For a literal of the form is𝑐(𝑦) or ¬is𝑐(𝑦), we have that 𝑦𝒞 is an application of a constructor 𝑐 if and only if𝑦 ℬ is an application of a constructor𝑐
-
[57]
For a literal of the form𝑎=𝑓 𝐴𝑖(𝑥), we have that 𝑎𝒞 = Ψ𝑖(𝑎ℬ) = Ψ𝑖(𝑓 ℬ 𝐴(𝑥ℬ)) =𝑓 𝒞 𝐴(𝑥𝒞)
-
[58]
□ Example 57
For a literal of the form𝑥=𝑔 𝐴𝑖(𝑎), we have that 𝑥𝒞 =𝑥 ℬ =𝑔 ℬ 𝐴(𝑎ℬ) =𝑔 ℬ 𝐴(Ψ−1 𝑖 (Ψ𝑖(𝑎ℬ))) =𝑔 𝒞 𝐴(𝑎𝒞). □ Example 57. Consider ^ℬ from Table 18, which satisfies the formulatrF ormula(𝜓)(Table 12). Accord- ing to Lemma 56, we can construct a Σ𝜓 ndt-interpretation ℬ1 that satisfies the same formula, and the three conditions specified in Lemma 56. This new in...
-
[59]
If 𝜎 /∈StructΣ𝑛+1 ∪Array Σ, then by definition 𝜎𝑖 =𝜎 *ℬ =𝜎 𝑖+1, so the inclusion is immediate
-
[60]
If𝜎∈Struct Σ𝑛+1, then𝜎 𝑖+1 =𝜎 𝑖 ∪𝑇 𝜎 (︀ Σ|𝒞𝒪,𝐵𝑖)︀ ,and hence𝜎 𝑖 ⊆𝜎 𝑖+1
-
[61]
base:if𝑖= 0, then𝐴 0 𝑘 =∅, inductive step:If𝑖≥1, then since𝐸 𝑖−1 𝑘 ⊆𝐸 𝑖 𝑘 and𝐼 𝑖−1 𝑘 =𝐼 𝑖 𝑘, we have 𝐴𝑖 𝑘 =AC(𝐼 𝑖−1 𝑘 , 𝐸𝑖−1 𝑘 ) =AC(𝐼 𝑖 𝑘, 𝐸𝑖−1 𝑘 )⊆AC(𝐼 𝑖 𝑘, 𝐸𝑖 𝑘) =𝐴 𝑖+1 𝑘
For all𝑘∈[1, 𝑛], we use induction over𝑖∈Nto show that𝐴 𝑖 𝑘 ⊆𝐴 𝑖+1 𝑘 . base:if𝑖= 0, then𝐴 0 𝑘 =∅, inductive step:If𝑖≥1, then since𝐸 𝑖−1 𝑘 ⊆𝐸 𝑖 𝑘 and𝐼 𝑖−1 𝑘 =𝐼 𝑖 𝑘, we have 𝐴𝑖 𝑘 =AC(𝐼 𝑖−1 𝑘 , 𝐸𝑖−1 𝑘 ) =AC(𝐼 𝑖 𝑘, 𝐸𝑖−1 𝑘 )⊆AC(𝐼 𝑖 𝑘, 𝐸𝑖 𝑘) =𝐴 𝑖+1 𝑘 . The inclusion holds since enlarging the codomain 𝑌 in AC(𝑋, 𝑌) preserves all almost constant functions. 32 □ No...
-
[62]
If𝜎∈𝐹 𝑘, then𝜎 𝑘 ̸=∅by IH, so according to Lemma 59,𝜎 𝑘+1 ⊇𝜎 𝑘 ̸=∅
-
[63]
Hence {︀ 𝑐(𝑡1,
If there exists a constructor 𝑐:𝜎 1 × · · · ×𝜎 𝑛 →𝜎 with each 𝜎𝑖 ∈𝐹 𝑘, then IH gives 𝜎𝑘 𝑖 ̸=∅ . Hence {︀ 𝑐(𝑡1, . . . , 𝑡𝑛)|𝑡 𝑖 ∈𝜎 𝑘 𝑖 }︀ ⊆𝑇 𝜎(Σ|𝒞𝒪,𝐵𝑘)⊆𝜎 𝑘+1,so𝜎 𝑘+1 ̸=∅
-
[64]
Therefore: 𝐴𝑘+1 𝑖 =AC(𝐼 𝑘 𝑖 , 𝐸𝑘 𝑖 )̸=∅
If 𝜎=𝐴 𝑖 is an array sort where 𝐸𝑖, 𝐼𝑖 ∈𝐹 𝑘, then IH gives 𝐼 𝑘 𝑖 ̸=∅ and 𝐸𝑘 𝑖 ̸=∅ . Therefore: 𝐴𝑘+1 𝑖 =AC(𝐼 𝑘 𝑖 , 𝐸𝑘 𝑖 )̸=∅. Hence for each𝜎there is some𝑘with𝜎 𝑘 ̸=∅, and so𝜎 𝒜 = ⋃︀ 𝑘∈N 𝜎𝑘 is nonempty.□ B.3. Properties of the Domains of the𝒯 N𝐷𝑇 Σ -interpretation In order to show that 𝒜 is a 𝒯 N𝐷𝑇 Σ -interpretation, we need to show that the relation ℛ𝒜 is...
-
[65]
, 𝑢𝑗−1, 𝑥, 𝑢𝑗+1,
In case (1), we fix for each𝑠∈[1, 𝑘]∖ {𝑗}some𝑢 𝑠 ∈𝜏 𝒜 𝑠 and define: 𝑓𝑖(𝑥) =𝑐(𝑢 1, . . . , 𝑢𝑗−1, 𝑥, 𝑢𝑗+1, . . . , 𝑢𝑘)
-
[66]
34 □ Definition 66
In case (2), we define 𝑓𝑖(𝑥) as the constant array from 𝐼 𝒜 𝑘 to 𝐸𝒜 𝑘 whose image is the singleton {𝑥}. 34 □ Definition 66. Let ΣDT be a datatype signature and 𝒞 be a ΣDT-interpretation. For every 𝑥∈𝜎 𝒞 for some𝜎∈ 𝒮 ΣDT, we define theminimum index of𝑥, denoted dtIdx(𝑥), as follows: dtIdx(𝑥) = min{𝑖∈N|𝑥∈𝑇 𝜎,𝑖(ΣDT|𝒞𝒪ΣDT , 𝐵)} where𝐵is theElem-sorted set wit...
-
[67]
If 𝜎∈ 𝒮 Σ ∖(Array Σ ∪Struct Σ𝑛+1), step 0 suggests that every such sort has an infinite domain, contradicting the fact that every sort in𝑉 ′′ has a finite domain
-
[68]
Hence𝜎∈Struct Σ𝑛+1 and thus𝑉 ′′ ⊆Struct Σ𝑛+1
If 𝜎=𝐴 𝑘 for some 𝑘∈[1, 𝑛] , then its element sort 𝐸𝑘 would be reachable from 𝐴𝑘 inside 𝐺′′ Σ, contradicting the definition of𝐸 𝑖1. Hence𝜎∈Struct Σ𝑛+1 and thus𝑉 ′′ ⊆Struct Σ𝑛+1. Step 5. The sorts in 𝑉 ′′ must be interpreted as in 𝒜.For every 𝑇𝑛+1-interpretation 𝒞 and every 𝜎∈𝑉 ′′ we have𝜎 𝒞 =𝜎 𝒜. In order to prove this claim, we first remember that accord...
-
[69]
Then, let 𝜎∈𝑉 ′′: 𝑇𝜎,𝑘+1(Σ|𝒞𝒪,𝐵) = 𝑇𝜎,𝑘(Σ|𝒞𝒪,𝐵)∪ {︀ 𝑐(𝑡1,
Step:Assume 𝑇𝜏,𝑘(Σ|𝒞𝒪,𝐵) =𝑇 𝜏,𝑘(Σ|𝒞𝒪, ̂︀𝐵) for every𝜏∈𝑉 ′′. Then, let 𝜎∈𝑉 ′′: 𝑇𝜎,𝑘+1(Σ|𝒞𝒪,𝐵) = 𝑇𝜎,𝑘(Σ|𝒞𝒪,𝐵)∪ {︀ 𝑐(𝑡1, . . . , 𝑡𝑚) ⃒⃒ 𝑐:𝜏 1 × · · · ×𝜏 𝑚 →𝜎∈ 𝒞𝒪 Σ𝑛+1, 𝑡 𝑖 ∈𝑇 𝜏𝑖,𝑘(Σ|𝒞𝒪,𝐵) }︀ . Since 𝜏1, . . . , 𝜏𝑚 ∈𝑉 ′′, by the IH we have 𝑇𝜏𝑖,𝑘(Σ|𝒞𝒪,𝐵) =𝑇 𝜏𝑖,𝑘(Σ|𝒞𝒪, ̂︀𝐵) for every 𝑖∈[1, 𝑚] . Thus,𝑇 𝜎,𝑘+1(Σ|𝒞𝒪,𝐵) =𝑇 𝜎,𝑘+1(Σ|𝒞𝒪, ̂︀𝐵). Thus,𝜎 𝒞 =𝑇 𝜎(Σ|𝒞𝒪, ̂︀𝐵) ...
-
[70]
If 𝑠1 =𝑠 2, then (𝑠2, 𝑠1) = (𝑠1, 𝑠2)∈𝑅
Symmetry:Assume (𝑠1, 𝑠2)∈𝑅 . If 𝑠1 =𝑠 2, then (𝑠2, 𝑠1) = (𝑠1, 𝑠2)∈𝑅 . Otherwise, 𝑠1, 𝑠2 ∈ SE𝜑(ℬ) and tl(𝑓 ℬ 𝐴𝑖(𝑠1)) =tl(𝑓 ℬ 𝐴𝑖(𝑠2)). By symmetry of equality, tl(𝑓 ℬ 𝐴𝑖(𝑠2)) =tl(𝑓 ℬ 𝐴𝑖(𝑠1)), hence(𝑠 2, 𝑠1)∈𝑅. 39
-
[71]
If 𝑠1 =𝑠 2 or 𝑠2 =𝑠 3, then by substitution we obtain (𝑠1, 𝑠3)∈𝑅
Transitivity:Assume (𝑠1, 𝑠2),(𝑠 2, 𝑠3)∈𝑅 . If 𝑠1 =𝑠 2 or 𝑠2 =𝑠 3, then by substitution we obtain (𝑠1, 𝑠3)∈𝑅 . Otherwise, 𝑠1, 𝑠2, 𝑠3 ∈SE 𝜑(ℬ) and tl(𝑓 ℬ 𝐴𝑖(𝑠1)) =tl(𝑓 ℬ 𝐴𝑖(𝑠2)) and tl(𝑓 ℬ 𝐴𝑖(𝑠2)) = tl(𝑓 ℬ 𝐴𝑖(𝑠3)). By transitivity of equality,tl(𝑓 ℬ 𝐴𝑖(𝑠1)) =tl(𝑓 ℬ 𝐴𝑖(𝑠3)), hence(𝑠 1, 𝑠3)∈𝑅. Thus 𝑅 partitions 𝑆∩𝐴 * 𝑖 ℬ into equivalence classes. Since this s...
-
[72]
If 𝑥∈𝜎 ℬ for some 𝜎 /∈StructΣ𝜑 𝑛+1 and 𝑥∈ ∪{𝜎 𝒜 |𝜎∈ 𝒮 Σ} ∪ (︀⋃︀ 𝑖∈[1,𝑛] 𝐴𝑖∘ℬ)︀ , then Ψ(𝑥) =𝑥
-
[73]
, 𝑡𝑘) for some 𝑐:𝜎 1 × · · · ×𝜎 𝑘 →𝜎∈ 𝒞𝒪 Σ𝑛+1, Ψ is defined for 𝑡1,
If 𝑥=𝑐 *(𝑡1, . . . , 𝑡𝑘) for some 𝑐:𝜎 1 × · · · ×𝜎 𝑘 →𝜎∈ 𝒞𝒪 Σ𝑛+1, Ψ is defined for 𝑡1, . . . , 𝑡𝑘, and ∀𝑖∈[1, 𝑘].Ψ(𝑡 𝑖)∈𝜎 𝒜 𝑖 thenΨ(𝑥) =𝑐(Ψ(𝑡 1), . . . ,Ψ(𝑡𝑘))
-
[74]
, 𝑡𝑘) for some 𝑖∈[1, 𝑛] , Ψ is defined over 𝑡1,
If 𝑥=𝑐 𝑖(𝑡1, . . . , 𝑡𝑘) for some 𝑖∈[1, 𝑛] , Ψ is defined over 𝑡1, . . . , 𝑡𝑘 and ∀𝑗∈2, . . . , 𝑘.Ψ(𝑡 𝑗)∈ 𝐸𝒜 𝑖 , then we defineΨ(𝑥)as follows: ∀𝑗∈𝐼 𝒜 𝑖 .Ψ(𝑥)(𝑗) = {︃ Ψ(𝑡min{𝑜(𝑘)|𝑘∈AssocInd(𝑥,𝑖).𝑘 *ℬ=𝑗}+1)if∃𝑘∈AssocInd(𝑥, 𝑖).𝑘 *ℬ =𝑗 tail𝑖(𝑥)otherwise Example 82.Consider the formula𝜓and its translation in Table 12 andℬ 1 as defined in Table 21. The set𝑆is g...
-
[75]
, 𝑡𝑚) and 𝑦=𝑐 *(𝑠1,
If 𝑥=𝑐 *(𝑡1, . . . , 𝑡𝑚) and 𝑦=𝑐 *(𝑠1, . . . , 𝑠𝑚) for some 𝑐:𝜎 1 × · · · ×𝜎 𝑘 →𝜎∈ 𝒞𝒪 Σ𝑛+1, then by definition there exists some 𝑗∈[1, 𝑘] such that 𝑡𝑗 ̸=𝑠 𝑗. According to the IH, Ψ(𝑡𝑗)̸= Ψ(𝑠 𝑗), and thusΨ(𝑥) =𝑐(Ψ(𝑡 1), . . . ,Ψ(𝑡𝑚))̸=𝑐(Ψ(𝑠 1), . . . ,Ψ(𝑠𝑚)) = Ψ(𝑦)
-
[76]
, 𝑡𝑚) and 𝑦= ˜𝑐 *(𝑠1,
If 𝑥= ^𝑐 *(𝑡1, . . . , 𝑡𝑚) and 𝑦= ˜𝑐 *(𝑠1, . . . , 𝑠𝑙), then Ψ(𝑥) = ^𝑐(Ψ(𝑡 1), . . . ,Ψ(𝑡𝑚))̸= ˜𝑐(Ψ(𝑠1), . . . ,Ψ(𝑠𝑙)) = Ψ(𝑦),since^𝑐̸= ˜𝑐. • If 𝑥, 𝑦∈𝐴 * 𝑖 ℬ for some 𝑖∈[1, 𝑛] , then we can denote 𝑥=𝑐 𝑖(𝑡1, . . . , 𝑡𝑘) and 𝑦=𝑐 𝑖(𝑠1, . . . , 𝑠𝑙). There are 2 subcases:
-
[77]
Hence, for every 𝑘∈𝐼 * 𝑖 ∖ {𝑙*ℬ |𝑙∈I (𝐴𝑖,𝜑)} we have that Ψ(𝑥)(𝑘) =tail 𝑖(𝑥)̸=tail 𝑖(𝑦) = Ψ(𝑦)
If ¬ (︀ 𝑥, 𝑦∈SE 𝜑(ℬ)∧tl(𝑓 ℬ 𝐴𝑖(𝑥)) =tl(𝑓 ℬ 𝐴𝑖(𝑦)) )︀ according to Lemma 76,tail𝑖(𝑥)̸=tail 𝑖(𝑦). Hence, for every 𝑘∈𝐼 * 𝑖 ∖ {𝑙*ℬ |𝑙∈I (𝐴𝑖,𝜑)} we have that Ψ(𝑥)(𝑘) =tail 𝑖(𝑥)̸=tail 𝑖(𝑦) = Ψ(𝑦)
-
[78]
Since𝑥, 𝑦∈SE 𝜑(ℬ)there are𝑎, 𝑏∈vars 𝐴𝑖(𝜑)with𝑎 *ℬ =𝑥and𝑏 *ℬ =𝑦
Otherwise, we have that (︀ 𝑥, 𝑦∈SE 𝜑(ℬ)∧tl(𝑓 ℬ 𝐴𝑖(𝑥)) =tl(𝑓 ℬ 𝐴𝑖(𝑦)) )︀ . Since𝑥, 𝑦∈SE 𝜑(ℬ)there are𝑎, 𝑏∈vars 𝐴𝑖(𝜑)with𝑎 *ℬ =𝑥and𝑏 *ℬ =𝑦. ℬsatisfiesL 3(𝜑): –𝑎 * =𝑔 𝐴𝑖(𝑎′), –𝑏 * =𝑔 𝐴𝑖(𝑏′), –𝑎 ′ =𝑓 𝐴𝑖(𝑎*), –𝑏 ′ =𝑓 𝐴𝑖(𝑏*). Thus, we have𝑎 ′ℬ =𝑓 ℬ 𝐴𝑖(𝑥)and𝑏 ′ℬ =𝑓 ℬ 𝐴𝑖(𝑦). Suppose towards contradiction that𝑎 ′ℬ =𝑏 ′ℬ. Using the first 2 equalities, we have: 𝑥=𝑎 ...
-
[79]
,idx(𝑡𝑚)}
If 𝑥𝑖+1ℛ𝒜𝑥𝑖 by the first case then 𝑘𝑖+1 ≤𝑘 𝑖:If 𝑥𝑖+1ℛ𝒜𝑥𝑖 by the first case, then by Lemma 86, we have that 𝑘𝑖 ≥max{idx(𝑡 1), . . . ,idx(𝑡𝑚)}. Since 𝑥𝑖+1 =𝑡 𝑗 for some 𝑗∈[1, 𝑚] , we have that 𝑘𝑖+1 =idx(𝑡 𝑗)≤𝑘 𝑖
-
[80]
By Lemma 87, we have that𝑘 𝑖+1 =idx(select 𝒜 𝐴𝑚(𝑥𝑖, 𝑗))<idx(𝑥 𝑖) =𝑘 𝑖
If 𝑥𝑖+1ℛ𝒜𝑥𝑖 by the second case then 𝑘𝑖+1 < 𝑘 𝑖:We can assume that 𝜎𝑖 =𝐴 𝑚 for some 𝑚∈[1, 𝑛]. By Lemma 87, we have that𝑘 𝑖+1 =idx(select 𝒜 𝐴𝑚(𝑥𝑖, 𝑗))<idx(𝑥 𝑖) =𝑘 𝑖
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.