Time-Slotted Multi-Cluster UAV AirComp with Energy-Awareness: A Pointer Network-Assisted Soft Actor-Critic Learning Framework
Pith reviewed 2026-06-26 22:57 UTC · model grok-4.3
The pith
A hierarchical learning framework with pointer networks and soft actor-critic minimizes AirComp aggregation error and energy consumption via UAV scheduling and trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
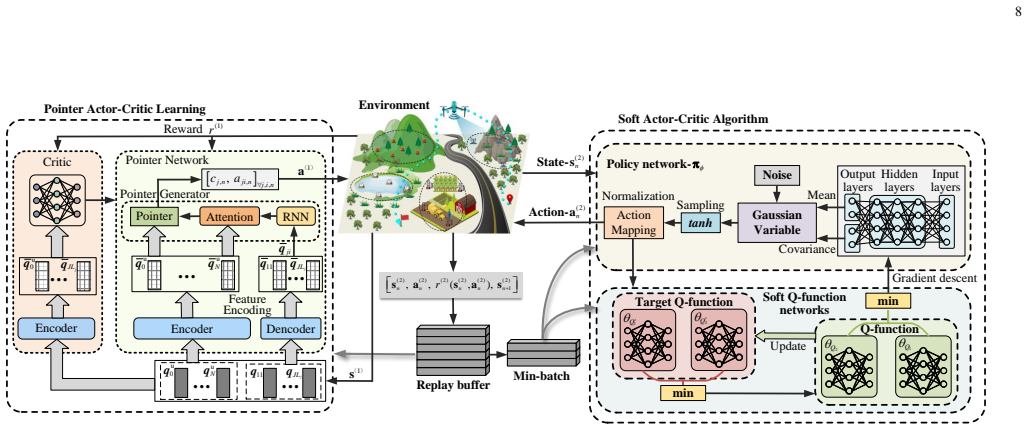
By decomposing the formulated problem into an inner optimization-based AirComp transceiver design layer and an outer DRL-based scheduling and trajectory design layer, with a pointer network actor-critic handling binary sensor scheduling and a soft actor-critic algorithm determining UAV trajectory, the system jointly minimizes AirComp aggregation error and energy consumption while exploiting UAV mobility for spatial and time diversity.
What carries the argument
The hierarchical learning framework that splits the joint optimization into an inner optimization-based transceiver design layer and an outer pointer-network-assisted soft actor-critic DRL layer for scheduling and trajectory design.
If this is right
- The framework converges during training as shown by the simulation results.
- It delivers lower AirComp aggregation error than the compared baseline schemes.
- It achieves lower energy consumption than the compared baseline schemes.
- UAV mobility supplies spatial and time diversity that improves computation efficiency over static setups.
Where Pith is reading between the lines
- The same two-layer split could be tested on scenarios with rapidly varying task distributions to check whether the inner layer remains stable.
- The reported energy reductions might translate into longer UAV flight times before battery replacement in field trials.
- Extending the pointer network to handle dynamic cluster formation rather than fixed clusters would test the method on a neighbouring coordination problem.
Load-bearing premise
Decomposing the joint optimization into an inner transceiver design layer and an outer DRL scheduling and trajectory layer incurs no substantial optimality loss.
What would settle it
A direct joint optimization of all variables together that yields substantially lower aggregation error and energy consumption than the two-layer solution would falsify the claim that the decomposition works without meaningful loss.
Figures






read the original abstract
Over-the-air computation (AirComp) has emerged as a promising approach for massive data aggregation, which is yet challenged by the channel variations, task distributions, and inherent energy limitation of the computation nodes. In this paper, we propose an unmanned aerial vehicle (UAV)-assisted Aircomp system to serve multi-cluster computation tasks over time, where the UAV mobility-facilitated spatial and time diversity is exploited for efficient and accurate data computation. Specifically, we aim for the minimization of AirComp aggregation error and the energy consumption by jointly optimizing the transceiver beamforming, normalizing factors, sensor scheduling, and UAV trajectory. To solve the formulated problem, we decompose it into two layers where the inner layer addresses the optimization-based AirComp transceiver design, and the outer layer focuses on the deep reinforcement learning (DRL)-based scheduling and trajectory design. In particular, a pointer network actor-critic learning is developed to tackle the binary scheduling problem, and a soft actor-critic DRL algorithm is employed to determine the UAV trajectory. Simulation results validate the convergence of the proposed hierarchical learning framework and demonstrate its significant performance gains in terms of AirComp aggregation error and energy consumption as compared with baseline schemes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a UAV-assisted multi-cluster AirComp system over time slots that minimizes aggregation error and energy consumption via joint optimization of transceiver beamforming, normalization factors, binary sensor scheduling, and UAV trajectory. The joint non-convex problem is decomposed into an inner optimization layer for transceiver design and an outer DRL layer that uses a pointer network for scheduling combined with soft actor-critic for trajectory planning. Simulation results are stated to confirm convergence of the hierarchical framework and performance improvements over baseline schemes.
Significance. If the decomposition incurs negligible optimality loss and the reported gains are reproducible, the work would provide a practical hierarchical approach for incorporating UAV mobility into AirComp systems, addressing energy and channel variation challenges in multi-cluster sensor aggregation scenarios.
major comments (2)
- [Problem Formulation and Solution Approach] Problem Formulation and Solution Approach (as described in the abstract and implied sections): The central claim relies on the decomposition into an inner transceiver optimization layer and outer DRL layer incurring no substantial optimality loss. However, no duality gap analysis, performance bound, or comparison against a joint monolithic solver is provided despite the problem being jointly non-convex with binary scheduling variables, continuous beamforming/normalization, and trajectory variables; this assumption is load-bearing for interpreting the simulation gains.
- [Simulation Results] Simulation Results (as referenced in the abstract): The abstract asserts that simulations validate convergence and significant gains in aggregation error and energy consumption, yet provides no details on experimental setup, parameter values, baseline definitions, exact performance metrics, number of Monte Carlo runs, or statistical analysis, preventing assessment of whether the data supports the performance claims.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment point-by-point below, providing honest responses based on the manuscript's content and scope.
read point-by-point responses
-
Referee: [Problem Formulation and Solution Approach] Problem Formulation and Solution Approach (as described in the abstract and implied sections): The central claim relies on the decomposition into an inner transceiver optimization layer and outer DRL layer incurring no substantial optimality loss. However, no duality gap analysis, performance bound, or comparison against a joint monolithic solver is provided despite the problem being jointly non-convex with binary scheduling variables, continuous beamforming/normalization, and trajectory variables; this assumption is load-bearing for interpreting the simulation gains.
Authors: We acknowledge that the decomposition is heuristic and we make no claim of negligible optimality loss or zero duality gap. The inner layer solves the transceiver subproblem to global optimality (via convex optimization) for any fixed scheduling and trajectory, while the outer pointer network + SAC layer handles the combinatorial scheduling and continuous trajectory to minimize the composite objective. Deriving a tight performance bound is intractable for this mixed-integer non-convex problem; we therefore rely on empirical validation. In the revision we will add an explicit limitations paragraph stating that the approach is suboptimal yet practical, and we will include an additional comparison against a myopic greedy scheduler to quantify the benefit of the learned policy. revision: partial
-
Referee: [Simulation Results] Simulation Results (as referenced in the abstract): The abstract asserts that simulations validate convergence and significant gains in aggregation error and energy consumption, yet provides no details on experimental setup, parameter values, baseline definitions, exact performance metrics, number of Monte Carlo runs, or statistical analysis, preventing assessment of whether the data supports the performance claims.
Authors: The full manuscript (Section IV) already specifies the simulation parameters (cluster count, sensor density, UAV velocity limits, Rician channel model, noise variance, energy coefficients), the four baseline schemes, the exact metrics (MSE and total energy), 500 Monte-Carlo runs with 95 % confidence intervals, and convergence plots. To improve clarity we will (i) expand the abstract with a one-sentence summary of key parameters and (ii) insert a compact simulation-setup table at the beginning of Section IV. revision: yes
Circularity Check
No circularity: standard hierarchical decomposition with conventional DRL components
full rationale
The paper decomposes a joint non-convex optimization into an inner transceiver design layer solved by optimization and an outer DRL layer (pointer network for binary scheduling, SAC for trajectory). This follows standard practice for such problems without any self-definitional reduction, fitted inputs renamed as predictions, or load-bearing self-citations. Simulation validation of convergence and gains is presented as empirical evidence rather than a constructed equivalence. No ansatz smuggling or renaming of known results occurs. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Safeguarding ISAC performance in low-altitude wireless 14 networks under channel access attack,
J. Wang, J. He, G. Sun, Z. Xiong, D. Niyato, S. Mao, D. I. Kim, and T. Xiang, “Safeguarding ISAC performance in low-altitude wireless 14 networks under channel access attack,”IEEE Trans. Inf. Forensics Security, vol. 21, pp. 3108–3122, 2026
2026
-
[2]
Security-aware joint sensing, communication, and computing optimization in low altitude wireless networks,
J. Wang, C. Zhao, J. He, G. Sun, W. Yuan, D. Niyato, L. Zhu, and T. Xiang, “Security-aware joint sensing, communication, and computing optimization in low altitude wireless networks,”IEEE Trans. Mobile Comput., pp. 1–14, 2026
2026
-
[3]
Survey on UA V cellular communications: Practical aspects, standardization advancements, regulation, and security challenges,
A. Fotouhi, H. Qiang, M. Ding, M. Hassan, L. G. Giordano, A. Garcia- Rodriguez, and J. Yuan, “Survey on UA V cellular communications: Practical aspects, standardization advancements, regulation, and security challenges,”IEEE Commun. Surveys Tuts., vol. 21, no. 4, pp. 3417–3442, 4th Quart. 2019
2019
-
[4]
Toward real- ization of low-altitude economy networks: Core architecture, integrated technologies, and future directions,
Y . Wang, G. Sun, Z. Sun, J. Wang, J. Li, C. Zhao, J. Wu, S. Liang, M. Yin, P. Wang, D. Niyato, S. Sun, and D. In Kim, “Toward real- ization of low-altitude economy networks: Core architecture, integrated technologies, and future directions,”IEEE Trans. Cogn. Commun. Netw., vol. 11, no. 5, pp. 2788–2820, Oct. 2025
2025
-
[5]
Semantic communication and security over cloud-network-end infrastructure: An effective architecture for intelligent mobile systems,
R. Zhang, H. Qian, J. Ma, N. Xi, X. Cai, B. Li, and D. Wei, “Semantic communication and security over cloud-network-end infrastructure: An effective architecture for intelligent mobile systems,”IEEE Veh. Technol. Mag., vol. 20, no. 4, pp. 104–113, Dec. 2025
2025
-
[6]
Large AI model-enabled secure communications in low-altitude wireless net- works: Concepts, perspectives and case study,
C. Zhang, G. Sun, Y . Lin, W. Yuan, S. Coleri, and D. Niyato, “Large AI model-enabled secure communications in low-altitude wireless net- works: Concepts, perspectives and case study,”IEEE Commun. Mag., vol. 64, no. 5, pp. 76–83, May 2026
2026
-
[7]
Constel- lation design for integrated sensing and communication with random waveforms,
X. Yang, R. Zhang, D. Zhai, F. Liu, R. Du, and T. X. Han, “Constel- lation design for integrated sensing and communication with random waveforms,”IEEE Trans. Wireless Commun., vol. 23, no. 11, pp. 17 415– 17 428, Nov 2024
2024
-
[8]
6G internet of things: A comprehensive survey,
D. C. Nguyen, M. Ding, P. N. Pathirana, A. Seneviratne, J. Li, D. Niyato, O. Dobre, and H. V . Poor, “6G internet of things: A comprehensive survey,”IEEE Internet Things J., vol. 9, no. 1, pp. 359–383, Jan. 2022
2022
-
[9]
Data collection and wireless communication in internet of things (IoT) using economic analysis and pricing models: A survey,
N. C. Luong, D. T. Hoang, P. Wang, D. Niyato, D. I. Kim, and Z. Han, “Data collection and wireless communication in internet of things (IoT) using economic analysis and pricing models: A survey,”IEEE Commun. Surveys Tuts., vol. 18, no. 4, pp. 2546–2590, 4th Quart. 2016
2016
-
[10]
Over-the-air computing for wireless data aggregation in massive IoT,
G. Zhu, J. Xu, K. Huang, and S. Cui, “Over-the-air computing for wireless data aggregation in massive IoT,”IEEE Wireless Commun., vol. 28, no. 4, pp. 57–65, Aug. 2021
2021
-
[11]
Over-the-air integrated sensing, communication, and computation in IoT networks,
X. Li, Y . Gong, K. Huang, and Z. Niu, “Over-the-air integrated sensing, communication, and computation in IoT networks,”IEEE Wireless Commun., vol. 30, no. 1, pp. 32–38, Feb. 2023
2023
-
[12]
Federated learning via over- the-air computation,
K. Yang, T. Jiang, Y . Shi, and Z. Ding, “Federated learning via over- the-air computation,”IEEE Trans. Wireless Commun., vol. 19, no. 3, pp. 2022–2035, Mar. 2020
2022
-
[13]
Wirelessly powered data aggregation for IoT via over-the-air function computation: Beamforming and power control,
X. Li, G. Zhu, Y . Gong, and K. Huang, “Wirelessly powered data aggregation for IoT via over-the-air function computation: Beamforming and power control,”IEEE Trans. Wireless Commun., vol. 18, no. 7, pp. 3437–3452, Jul. 2019
2019
-
[14]
UA V-assisted multi-cluster over-the-air computation,
M. Fu, Y . Zhou, Y . Shi, C. Jiang, and W. Zhang, “UA V-assisted multi-cluster over-the-air computation,”IEEE Trans. Wireless Commun., vol. 22, no. 7, pp. 4668–4682, Jul. 2023
2023
-
[15]
A survey on over-the-air computation,
A. S ¸ahin and R. Yang, “A survey on over-the-air computation,”IEEE Commun. Surveys Tuts., vol. 25, no. 3, pp. 1877–1908, 3rd Quart. 2023
1908
-
[16]
A 3-D dynamic non-WSS cluster geometrical-based stochastic model for UA V MIMO channels,
C. Ge, R. Zhang, Y . Jiang, B. Li, and Y . He, “A 3-D dynamic non-WSS cluster geometrical-based stochastic model for UA V MIMO channels,” IEEE Trans. Veh. Technol., vol. 71, no. 7, pp. 6884–6899, Jul. 2022
2022
-
[17]
Machine learning for large-scale optimization in 6G wireless networks,
Y . Shi, L. Lian, Y . Shi, Z. Wang, Y . Zhou, L. Fu, L. Bai, J. Zhang, and W. Zhang, “Machine learning for large-scale optimization in 6G wireless networks,”IEEE Commun. Surveys Tuts., vol. 25, no. 4, pp. 2088–2132, 4th Quart. 2023
2088
-
[18]
Deep graph reinforcement learning for uav-enabled multi-user secure communications,
X. Tang, K. Zhao, C. Shen, Q. Du, Y . Wang, D. Niyato, and Z. Han, “Deep graph reinforcement learning for uav-enabled multi-user secure communications,”IEEE Trans. Mobile Comput., vol. 24, no. 9, pp. 8780–8793, Sep. 2025
2025
-
[19]
Multi- objective aerial collaborative secure communication optimization via generative diffusion model-enabled deep reinforcement learning,
C. Zhang, G. Sun, J. Li, Q. Wu, J. Wang, D. Niyato, and Y . Liu, “Multi- objective aerial collaborative secure communication optimization via generative diffusion model-enabled deep reinforcement learning,”IEEE Trans. Mobile Comput., vol. 24, no. 4, pp. 3041–3058, Apr. 2025
2025
-
[20]
Integrating sensing and communi- cations for ubiquitous IoT: Applications, trends, and challenges,
Y . Cui, F. Liu, X. Jing, and J. Mu, “Integrating sensing and communi- cations for ubiquitous IoT: Applications, trends, and challenges,”IEEE Netw., vol. 35, no. 5, pp. 158–167, Sep. 2021
2021
-
[21]
UA V aided over-the- air computation,
M. Fu, Y . Zhou, Y . Shi, W. Chen, and R. Zhang, “UA V aided over-the- air computation,”IEEE Trans. Wireless Commun., vol. 21, no. 7, pp. 4909–4924, Jul. 2022
2022
-
[22]
Performance analysis of UA V-enabled over- the-air computation under imperfect channel estimation,
H. Jung and S.-W. Ko, “Performance analysis of UA V-enabled over- the-air computation under imperfect channel estimation,”IEEE Wireless Commun. Lett., vol. 11, no. 3, pp. 438–442, Mar. 2022
2022
-
[23]
Reliable majority vote computation with complementary sequences for UA V waypoint flight control,
A. S ¸ahin and X. Wang, “Reliable majority vote computation with complementary sequences for UA V waypoint flight control,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 12 608–12 621, Oct. 2024
2024
-
[24]
Over-the-air computation strategy using space–time line code for data collection by multiple unmanned aerial vehicles,
J. Joung and J. Fan, “Over-the-air computation strategy using space–time line code for data collection by multiple unmanned aerial vehicles,” IEEE Access, vol. 9, pp. 105 230–105 241, Jul. 2021
2021
-
[25]
Optimized UA V trajectory and transceiver design for over-the-air computation systems,
X. Zeng, X. Zhang, and F. Wang, “Optimized UA V trajectory and transceiver design for over-the-air computation systems,”IEEE Open Journal of the Computer Society, vol. 3, pp. 313–322, Dec. 2022
2022
-
[26]
Distributed DRL-based intelligent over-the-air computation in un- manned aerial vehicle swarm-assisted intelligent transportation system,
P. Hou, Y . Huang, H. Zhu, Z. Lu, S.-C. Huang, Y . Yang, and H. Chai, “Distributed DRL-based intelligent over-the-air computation in un- manned aerial vehicle swarm-assisted intelligent transportation system,” IEEE Internet Things J., vol. 11, no. 21, pp. 34 382–34 397, Nov. 2024
2024
-
[27]
Optimized power control design for over-the-air federated edge learning,
X. Cao, G. Zhu, J. Xu, Z. Wang, and S. Cui, “Optimized power control design for over-the-air federated edge learning,”IEEE J. Sel. Areas Commun., vol. 40, no. 1, pp. 342–358, Jan. 2022
2022
-
[28]
UA V-assisted integrated communication and over-the-air computation with interference awareness,
X. Lan, X. Tang, R. Zhang, B. Li, Y . Wang, D. Niyato, and Z. Han, “UA V-assisted integrated communication and over-the-air computation with interference awareness,”IEEE Trans. Commun., vol. 73, no. 11, pp. 10 647–10 661, Nov. 2025
2025
-
[29]
Over- the-air computation via reconfigurable intelligent surface,
W. Fang, Y . Jiang, Y . Shi, Y . Zhou, W. Chen, and K. B. Letaief, “Over- the-air computation via reconfigurable intelligent surface,”IEEE Trans. Commun., vol. 69, no. 12, pp. 8612–8626, Dec. 2021
2021
-
[30]
Wireless-powered over-the-air computation in intelligent reflecting surface-aided IoT net- works,
Z. Wang, Y . Shi, Y . Zhou, H. Zhou, and N. Zhang, “Wireless-powered over-the-air computation in intelligent reflecting surface-aided IoT net- works,”IEEE Internet Things J., vol. 8, no. 3, pp. 1585–1598, Feb. 2021
2021
-
[31]
Unfolded deep graph learning for networked over-the-air computation,
X. Tang, H. Xiao, C. Shen, L. Sun, Q. Du, D. Niyato, and Z. Han, “Unfolded deep graph learning for networked over-the-air computation,” IEEE Trans. Wireless Commun., vol. 24, no. 11, pp. 9296–9310, Nov. 2025
2025
-
[32]
Space/aerial-assisted computing offloading for iot applications: A learning-based approach,
N. Cheng, F. Lyu, W. Quan, C. Zhou, H. He, W. Shi, and X. Shen, “Space/aerial-assisted computing offloading for iot applications: A learning-based approach,”IEEE J. Sel. Areas Commun., vol. 37, no. 5, pp. 1117–1129, May 2019
2019
-
[33]
Over-the-air computation systems: Optimization, analysis and scaling laws,
W. Liu, X. Zang, Y . Li, and B. Vucetic, “Over-the-air computation systems: Optimization, analysis and scaling laws,”IEEE Trans. Wireless Commun., vol. 19, no. 8, pp. 5488–5502, Aug. 2020
2020
-
[34]
Cooperative interference man- agement for over-the-air computation networks,
X. Cao, G. Zhu, J. Xu, and K. Huang, “Cooperative interference man- agement for over-the-air computation networks,”IEEE Trans. Wireless Commun., vol. 20, no. 4, pp. 2634–2651, Apr. 2021
2021
-
[35]
Approximate complexity and functional representation,
R. Buck, “Approximate complexity and functional representation,”J. Math. Analysis App., vol. 70, no. 1, pp. 280–298, 1979
1979
-
[36]
Generative AI for deep reinforcement learning: Framework, analysis, and use cases,
G. Sun, W. Xie, D. Niyato, F. Mei, J. Kang, H. Du, and S. Mao, “Generative AI for deep reinforcement learning: Framework, analysis, and use cases,”IEEE Wireless Commun., vol. 32, no. 3, pp. 186–195, Jun. 2025
2025
-
[37]
Enhancing deep reinforcement learning: A tutorial on generative diffusion models in network optimization,
H. Du, R. Zhang, Y . Liu, J. Wang, Y . Lin, Z. Li, D. Niyato, J. Kang, Z. Xiong, S. Cui, B. Ai, H. Zhou, and D. I. Kim, “Enhancing deep reinforcement learning: A tutorial on generative diffusion models in network optimization,”IEEE Commun. Surveys Tut., vol. 26, no. 4, pp. 2611–2646, 4th Quart. 2024
2024
-
[38]
Pointer networks,
O. Vinyals, M. Fortunato, and N. Jaitly, “Pointer networks,”Adv. Neural Inf. Process. Syst., vol. 28, pp. 2692–2700, Dec. 2015
2015
-
[39]
Soft actor-critic algorithms and applications,
T. Haarnoja, A. Zhou, K. Hartikainen, G. Tucker, S. Ha, J. Tan, V . Kumar, H. Zhu, A. Gupta, P. Abbeel, and S. Leviney, “Soft actor-critic algorithms and applications,”arXiv preprint arXiv:1812.05905, 2018
Pith/arXiv arXiv 2018
-
[40]
Addressing function approxi- mation error in actor-critic methods,
S. Fujimoto, H. v. Hoof, and D. Meger, “Addressing function approxi- mation error in actor-critic methods,”arXiv preprint arXiv:1802.09477, 2018
Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.