Inertial drag in granular media
Pith reviewed 2026-05-24 22:35 UTC · model grok-4.3
The pith
Objects accelerating through granular media experience strongly enhanced drag forces in an inertial regime.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
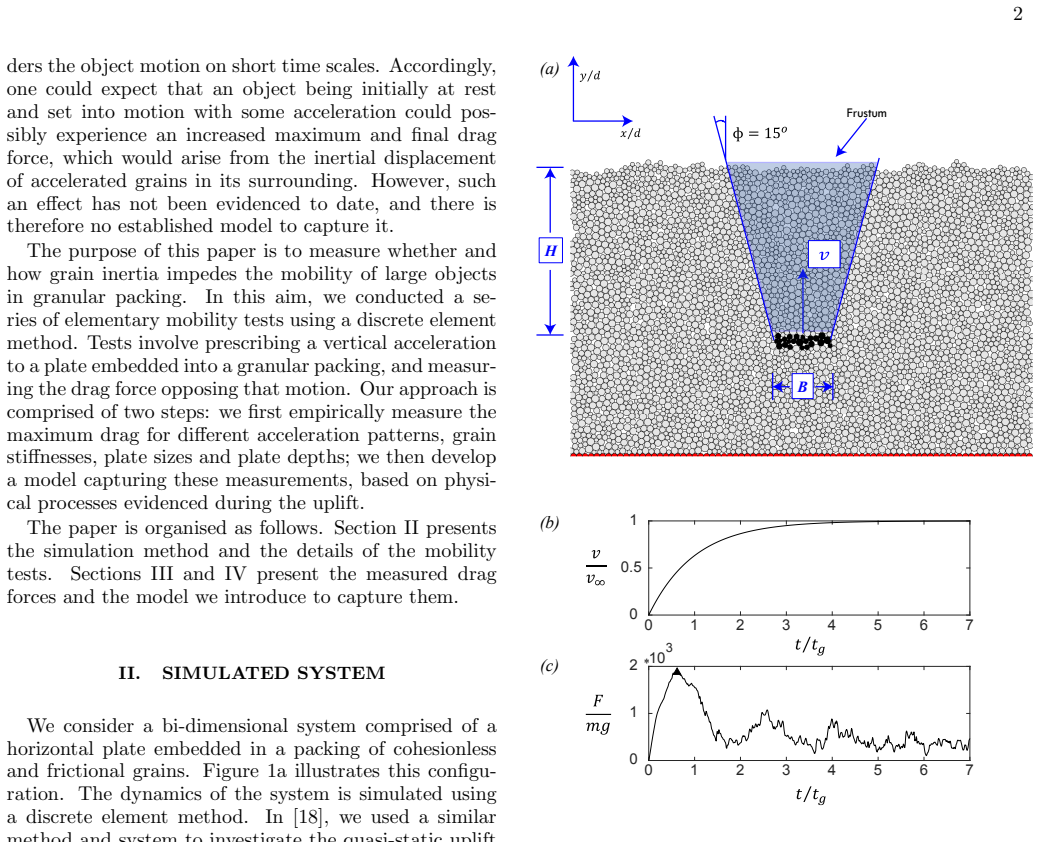
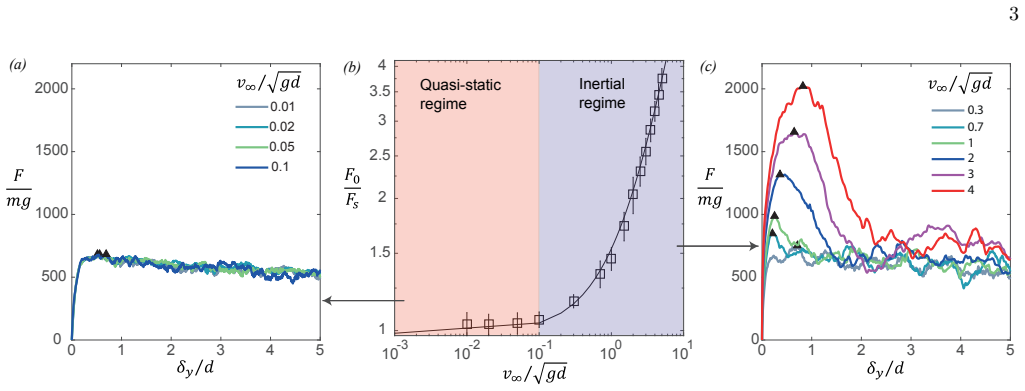
Simulations of vertically uplifting a plate through a granular packing with prescribed acceleration patterns reveal that the drag force depends on the object's acceleration. Depending on plate size, depth, and acceleration, there is a rate-independent regime and an inertial regime where acceleration strongly enhances the drag. An elasto-inertial drag force model, based on gradual elasto-inertial mobilisation of grains located above the plate, captures the measured forces in these regimes.
What carries the argument
An elasto-inertial drag force model that incorporates gradual mobilization of grains above the accelerating plate.
If this is right
- In the rate-independent regime the drag force follows the usual dependence on depth and plate size without additional acceleration terms.
- In the inertial regime the drag force rises in proportion to the object's acceleration.
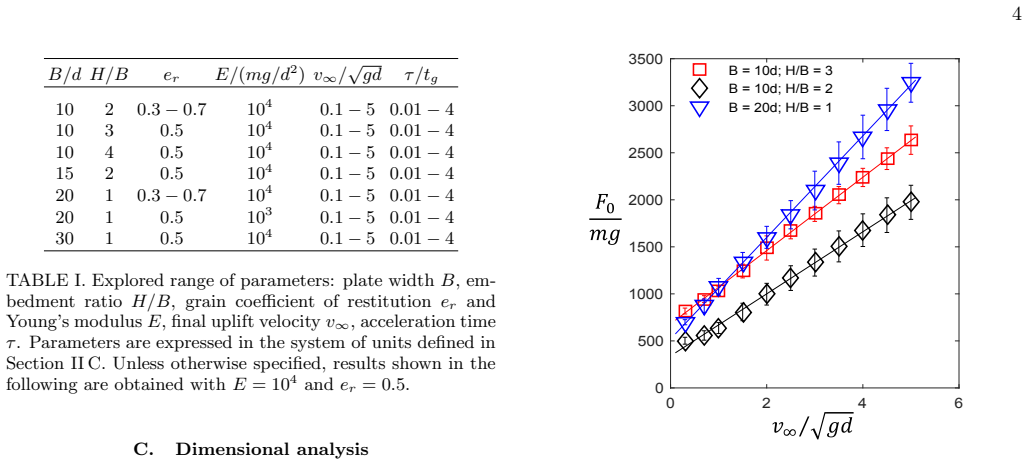
- The same elasto-inertial model reproduces measured forces across varied plate sizes, depths, and acceleration histories.
- Mobility under steady loading differs fundamentally from mobility under unsteady acceleration in granular packings.
Where Pith is reading between the lines
- Dynamic loads on buried objects, such as rapid uplift or impact, would require an inertial correction to standard drag estimates.
- The distinction between regimes may extend to other unsteady processes in granular systems, such as seismic shaking or rapid penetration.
Load-bearing premise
Grain mobilization processes observed in the simulations generalize to physical granular materials.
What would settle it
Measuring the drag force on an accelerated plate in a laboratory granular packing and testing whether the inertial-regime data match the elasto-inertial model's quantitative predictions.
Figures
read the original abstract
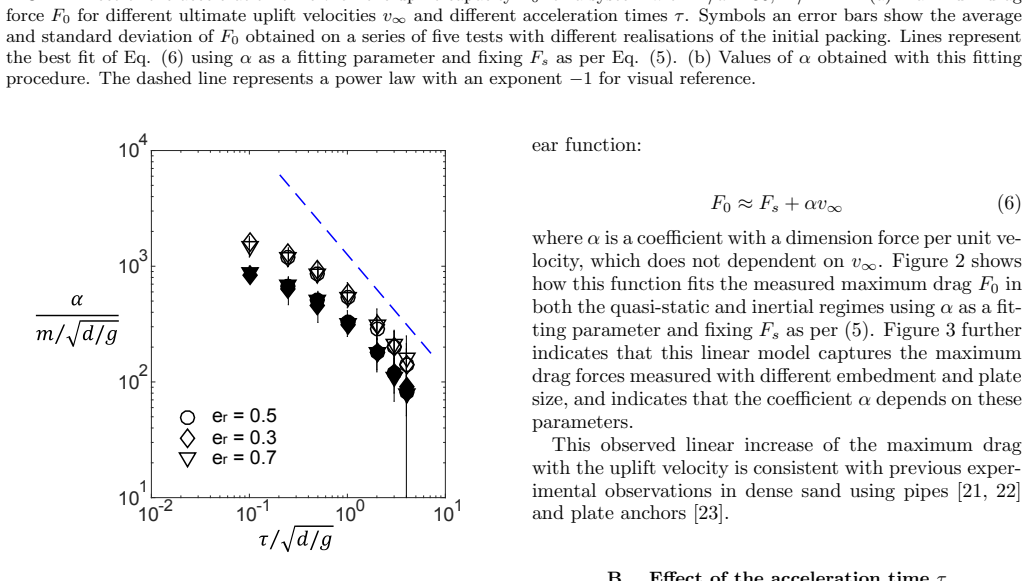
Like in liquids, objects moving in granular materials experience a drag force. We investigate here whether and how the object acceleration affect this drag force. The study is based on simulations of a canonical drag test, which involves vertically uplifting a plate through a granular packing with a prescribed acceleration pattern. Depending on the plate size, plate depth and acceleration pattern, results evidence a rate-independent regime and an inertial regime where the object acceleration strongly enhances the drag force. We introduce an elasto-inertial drag force model that captures the measured drag forces in these two regimes. The model is based on observed physical processes including a gradual, elasto-inertial mobilisation of grains located above the plate. These results and analysis point out fundamental differences between mobility in granular materials upon steady and unsteady loadings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript uses discrete-element simulations of a canonical plate-uplift test in which a plate is driven vertically through a granular packing according to prescribed acceleration histories. Depending on plate size, burial depth and acceleration pattern, the simulations exhibit a rate-independent drag regime and an inertial regime in which plate acceleration markedly increases the measured drag force. From direct observation of grain kinematics the authors construct an elasto-inertial drag model that is stated to reproduce the simulated forces in both regimes; the model is built on a gradual, elasto-inertial mobilisation of grains above the plate. The work concludes that steady and unsteady loadings produce qualitatively different mobility in granular media.
Significance. If the reported regimes and the associated model are robust, the paper supplies a mechanistic, simulation-derived framework for inertial drag under unsteady loading that is absent from most steady-state granular-drag literature. The explicit link between observed grain-mobilisation processes and the functional form of the drag law is a methodological strength. The results are relevant to any application involving rapid acceleration of objects in granular beds (penetration, locomotion, seismic loading) and could motivate targeted experiments.
major comments (2)
- [§4] §4 (elasto-inertial model): the manuscript states that the model 'captures the measured drag forces' but provides no explicit account of how the model coefficients are obtained, whether they are held fixed across all acceleration patterns, or whether they are determined by fitting the same data used to identify the two regimes. This information is load-bearing for the central claim that the model reproduces both regimes.
- [Results] Results section (regime identification): the distinction between rate-independent and inertial regimes is presented without quantitative thresholds, error bars on the drag-force data, or statistics across independent realisations. Without these, it is difficult to judge the robustness of the reported transition and therefore the scope of the model.
minor comments (2)
- [Abstract] Abstract: no numerical values (e.g., range of accelerations, magnitude of drag enhancement, plate dimensions) are supplied, reducing the reader's ability to gauge the practical significance of the regimes.
- [Figures] Figure captions and text: several figures that illustrate grain mobilisation would benefit from additional annotations (arrows, colour scales) that directly link the visualised kinematics to the terms appearing in the elasto-inertial model.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the positive overall assessment. We address the two major comments point by point below. Both points identify genuine gaps in the current manuscript that we will correct in revision.
read point-by-point responses
-
Referee: [§4] §4 (elasto-inertial model): the manuscript states that the model 'captures the measured drag forces' but provides no explicit account of how the model coefficients are obtained, whether they are held fixed across all acceleration patterns, or whether they are determined by fitting the same data used to identify the two regimes. This information is load-bearing for the central claim that the model reproduces both regimes.
Authors: We agree that the procedure for determining the model coefficients must be stated explicitly. In the revised manuscript we will add a dedicated paragraph in §4 that (i) describes the fitting protocol, (ii) states that a single set of coefficients is used for all acceleration histories, and (iii) clarifies whether the coefficients were obtained from an independent subset of the data or from auxiliary simulations. These additions will remove any ambiguity about the scope of the model. revision: yes
-
Referee: [Results] Results section (regime identification): the distinction between rate-independent and inertial regimes is presented without quantitative thresholds, error bars on the drag-force data, or statistics across independent realisations. Without these, it is difficult to judge the robustness of the reported transition and therefore the scope of the model.
Authors: The referee correctly identifies the absence of quantitative support for the regime boundaries. In revision we will (i) define explicit numerical thresholds (e.g., a critical acceleration or force-ratio value) used to separate the regimes, (ii) add error bars derived from multiple independent realizations, and (iii) report the number of realizations and the observed variability. These changes will allow readers to assess the robustness of the transition directly from the figures and text. revision: yes
Circularity Check
No significant circularity
full rationale
The paper reports DEM simulation outcomes for a plate-uplift test under prescribed accelerations, identifies rate-independent and inertial drag regimes from those runs, and constructs a phenomenological elasto-inertial model directly from the observed grain-mobilization processes in the same simulations. No load-bearing step reduces by construction to its own inputs: the model is presented as capturing the measured forces via observed processes rather than as an independent prediction, there are no self-citations invoked as uniqueness theorems, and no parameters are fitted on a subset then renamed as predictions of closely related quantities. The derivation chain remains self-contained against the simulation data and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
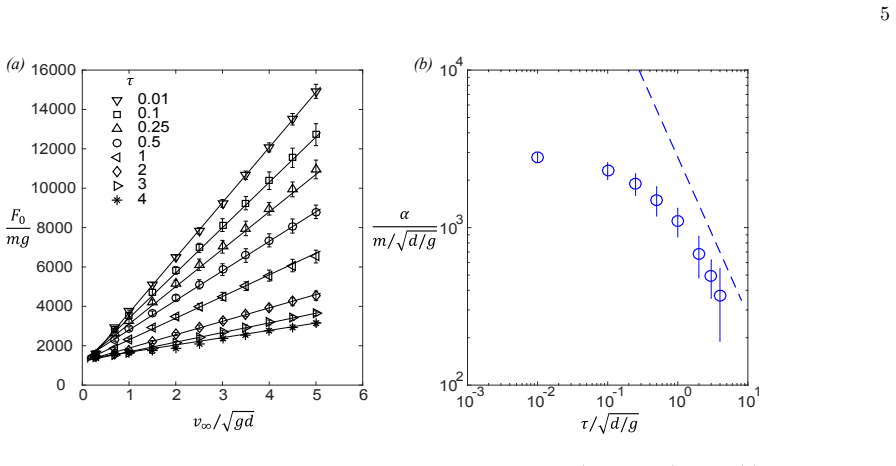
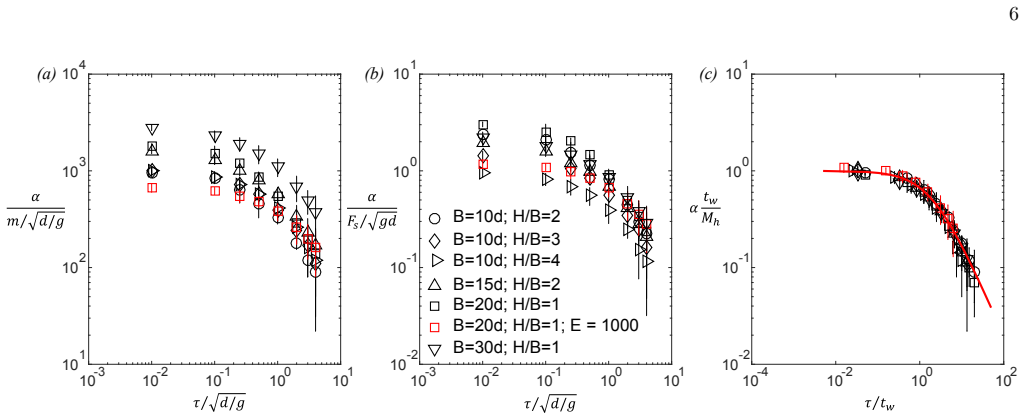
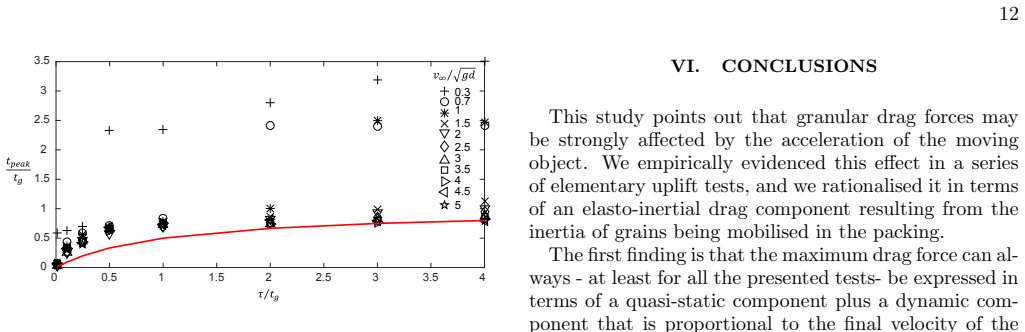
Scaling of α Figure 6c compares the measured slopes α with the model prediction in Eq. (19). When plotting the nor- malised slope αtw/Mh as a function of the normalised acceleration time τ/tw, all numerical data obtained for different pate sizesB, different plate embedmentsH and different grain stiffnesses E collapse onto a single curve. The prediction of the...
-
[2]
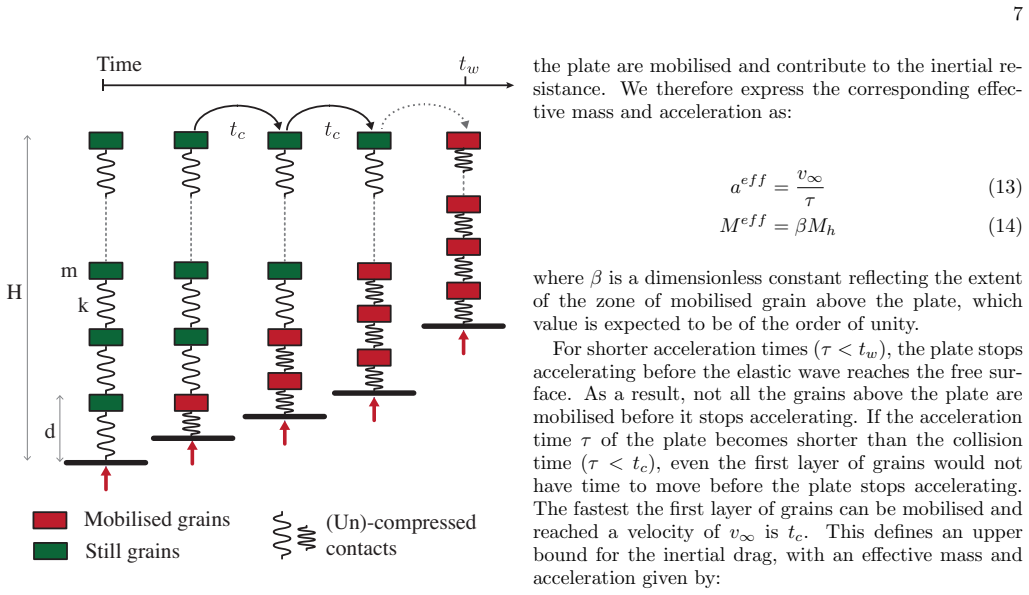
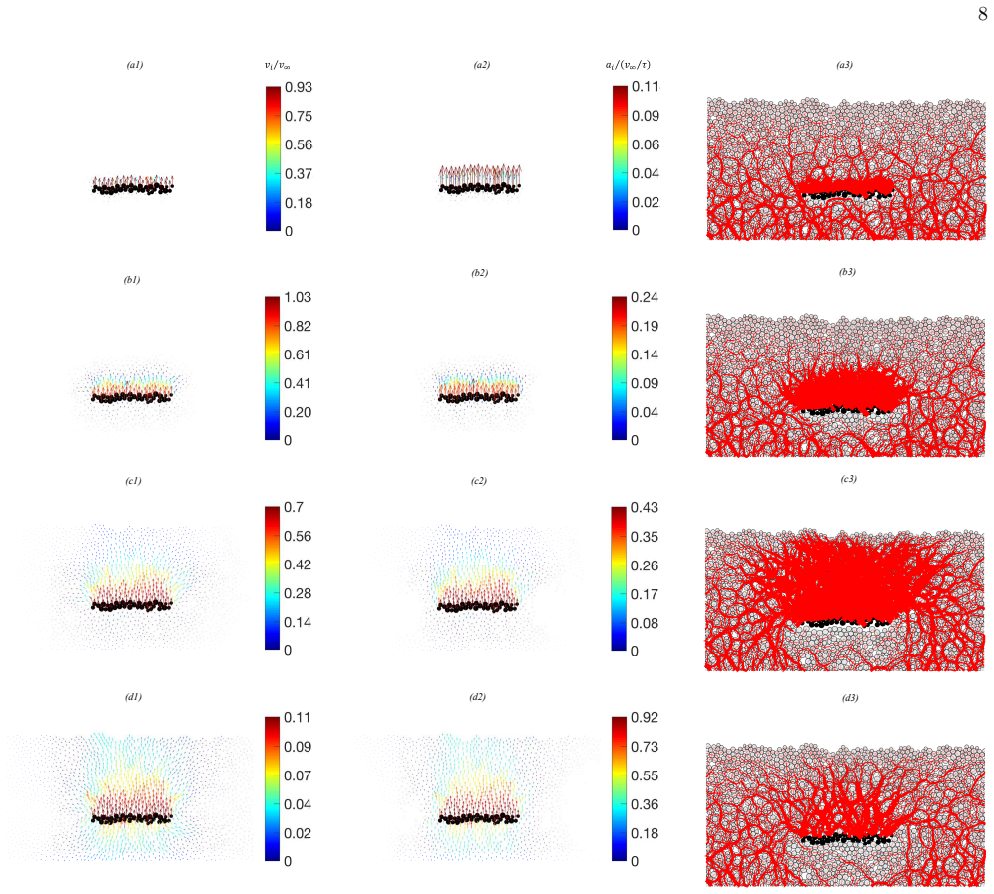
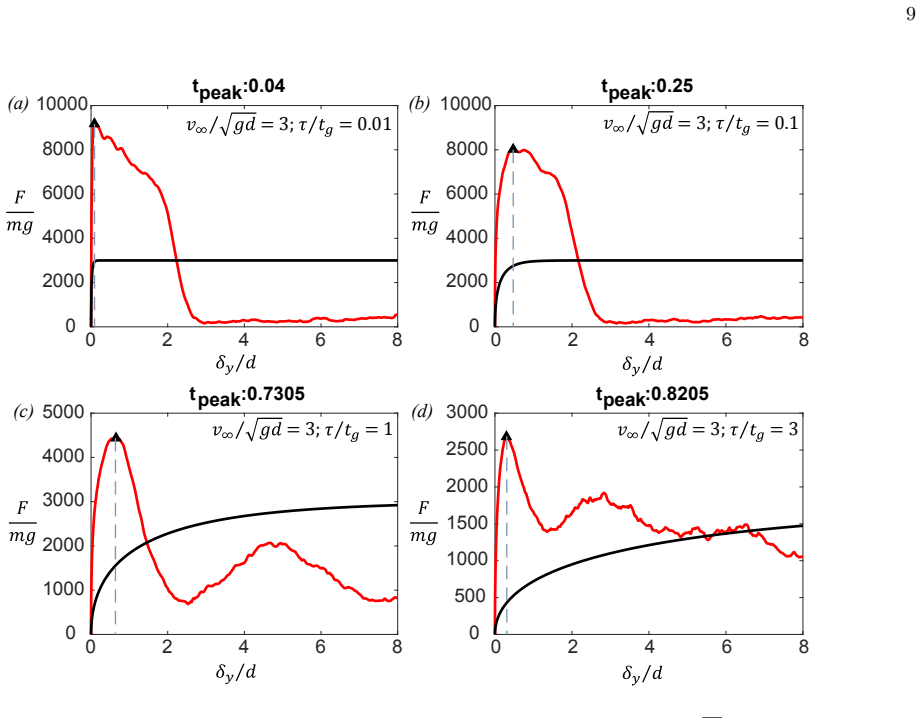
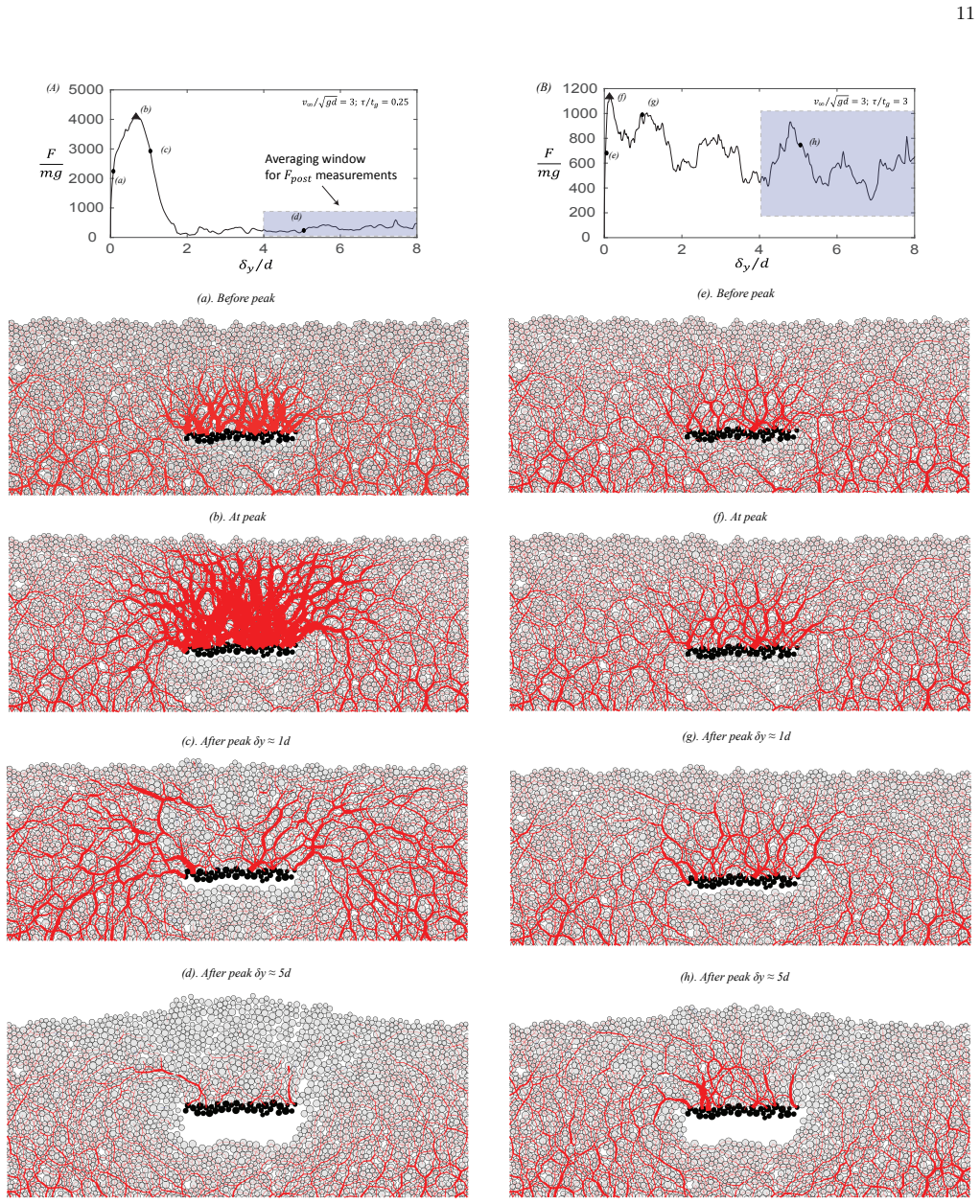
Partial/full mobilisation of grains above the plate Figure 8 illustrates the contact forces and the grain dis- placements in the granular packing when the maximum drag force is reached. Grain displacements are analysed via the average grain velocity and acceleration defined by: vi = xi(tpeak)−xi(t = 0) tpeak (20) ai = xi(tpeak)−xi(t = 0) t2 peak/2 (21) 9 0...
work page 2000
-
[3]
B. Andreotti, Y. Forterre, and O. Pouliquen, Granular media: between fluid and solid (Cambridge University Press, 2013). 13
work page 2013
-
[4]
M. Randolph, S. Gourvenec, D. White, and M. Cassidy, Offshore geotechnical engineering , Vol. 2 (Spon Press New York, 2011)
work page 2011
-
[5]
B. M. Das and S. K. Shukla, Earth anchors (J. Ross Publishing, 2013)
work page 2013
-
[6]
B. M. Das, Principles of foundation engineering (Cen- gage learning, 2015)
work page 2015
-
[7]
J. Yi, S. Goh, F. Lee, and M. Randolph, G´ eotechnique 62, 707 (2012)
work page 2012
-
[8]
G. Meyerhof and J. Adams, Canadian geotechnical jour- nal 5, 225 (1968)
work page 1968
-
[9]
R. K. Rowe and E. H. Davis, Geotechnique32, 25 (1982)
work page 1982
-
[10]
E. J. Murray and J. D. Geddes, Journal of Geotechnical Engineering 113, 202 (1987)
work page 1987
-
[11]
R. Merifield and S. Sloan, Canadian Geotechnical Journal 43, 852 (2006)
work page 2006
- [12]
-
[13]
V. N. Khatri and J. Kumar, Canadian Geotechnical Jour- nal 48, 511 (2011)
work page 2011
-
[14]
P. Bhattacharya and J. Kumar, Canadian Geotechnical Journal 51, 1365 (2014)
work page 2014
- [15]
- [16]
- [17]
- [18]
- [19]
-
[20]
D. J. Costantino, T. J. Scheidemantel, M. B. Stone, C. Conger, K. Klein, M. Lohr, Z. Modig, and P. Schiffer, Physical Review Letters 101 (2008)
work page 2008
-
[21]
J.-F. M´ etayer, D. J. Suntrup III, C. Radin, H. L. Swinney, and M. Schr¨ oter, EPL (Europhysics Letters) 93, 64003 (2011)
work page 2011
-
[22]
Hsu, Soils and foundations 33, 159 (1993)
T.-W. Hsu, Soils and foundations 33, 159 (1993)
work page 1993
- [23]
-
[24]
M. E. Bychkowski, (2016)
work page 2016
- [25]
- [26]
- [27]
-
[28]
N. Gravish, P. B. Umbanhowar, and D. I. Goldman, Physical review letters 105, 128301 (2010)
work page 2010
-
[29]
D. Costantino, J. Bartell, K. Scheidler, and P. Schiffer, Physical Review E 83, 011305 (2011)
work page 2011
-
[30]
Y. Ding, N. Gravish, and D. I. Goldman, Physical Re- view Letters 106, 028001 (2011)
work page 2011
-
[31]
B. Percier, S. Manneville, J. N. McElwaine, S. W. Morris, and N. Taberlet, Physical Review E 84, 051302 (2011)
work page 2011
-
[32]
F. Q. Potiguar and Y. Ding, Physical Review E 88, 012204 (2013)
work page 2013
-
[33]
Y. Takehara, S. Fujimoto, and K. Okumura, EPL (Eu- rophysics Letters) 92, 44003 (2010)
work page 2010
-
[34]
Y. Takehara and K. Okumura, Physical review letters 112, 148001 (2014)
work page 2014
- [35]
-
[36]
P. G. Rognon, T. Miller, B. Metzger, and I. Einav, J. Fluid Mech 764, 171 (2015)
work page 2015
-
[37]
R. Candelier and O. Dauchot, Physical review letters 103, 128001 (2009)
work page 2009
- [38]
-
[39]
E. Kolb, P. Cixous, N. Gaudouen, and T. Darnige, Phys- ical Review E 87, 032207 (2013)
work page 2013
- [40]
-
[41]
F. Guillard, Y. Forterre, and O. Pouliquen, Physical review letters 110, 138303 (2013)
work page 2013
-
[42]
Seguin, The European Physical Journal E 42, 13 (2019)
A. Seguin, The European Physical Journal E 42, 13 (2019)
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.