Multi-Sensor Integrated Sensing and Communication for Critical Infrastructure Protection
Pith reviewed 2026-06-30 05:16 UTC · model grok-4.3
The pith
Deploying multiple passive sensors near protected sites improves coverage and precision in drone detection using base station signals.
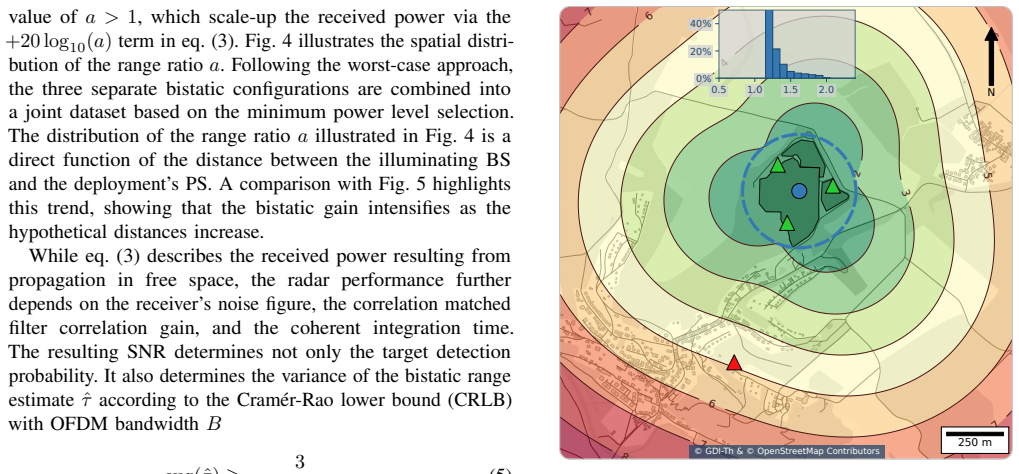
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
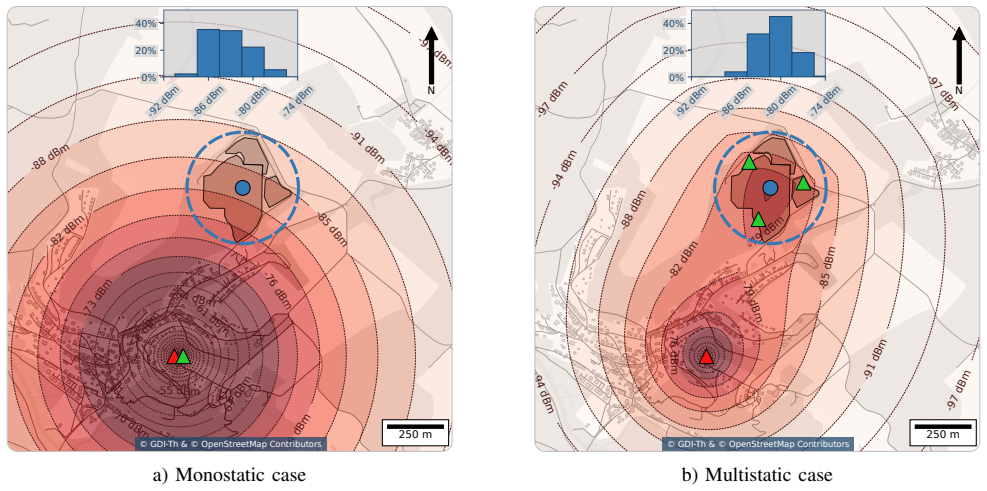
The multistatic architecture has several advantages over the often considered quasi-monostatic architecture where one sniffer is located close to the base station, in terms of coverage and geometric dilution of precision for the considered use case of protecting critical infrastructure.
What carries the argument
Multistatic range-Doppler estimation performed according to the Cooperative Passive Coherent Location (CPCL) principle with synchronization via downlink and uplink connections.
If this is right
- Improved monitoring of lower airspace above sensitive sites to prevent drone overflights.
- Enhanced performance in range and Doppler measurements due to favorable sensor geometry.
- Practical comparison of multistatic and quasi-monostatic setups for the specific use case.
- Support for ISAC as a service in future mobile networks.
Where Pith is reading between the lines
- Similar sensor deployments could apply to other security and surveillance scenarios.
- Integration with existing networks could reduce the need for dedicated radar systems.
- Further analysis might reveal optimal sensor placement strategies for different site layouts.
Load-bearing premise
Three or more passive sniffing sensors deployed near the protected site and connected via DL/UL to a distant illumination base station can reliably perform multistatic range-Doppler estimation according to the CPCL principle.
What would settle it
Measurement of coverage area and GDoP in a real-world test with both architectures, where the multistatic setup fails to show superior performance.
Figures


read the original abstract
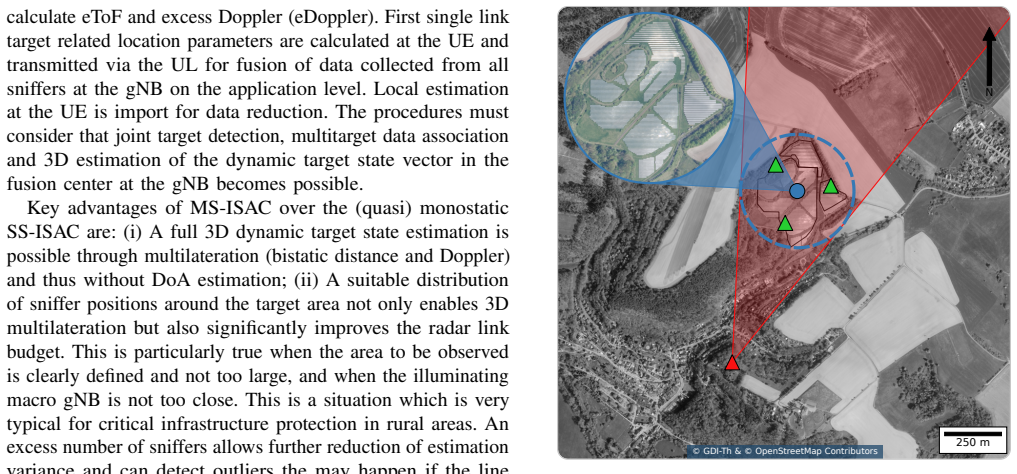
Integrated Sensing and Communications (ISAC) will become a service in future mobile communication networks. It enables the detection and recognition of passive objects and environments using radar-like sensing. One promising first application is the protection of critical infrastructure (CI), for example by monitoring the lower airspace above sensitive sites or facilities to prevent unauthorized drone overflights. Our proposal is based on the concept of a distributed multi-sensor (MS)-ISAC. We assume deploying three or more additional passive sniffing sensors near the protected site (PS) of a CI. The sniffers are connected via Downlink (DL) / Uplink (UL) to the distant illumination base station (BS). Multistatic range-Doppler estimation, including synchronization, is performed according to the Cooperative Passive Coherent Location (CPCL) principle. The multistatic architecture has several advantages over the often considered quasi-monostatic architecture where one sniffer is located close to the base station. We discuss the advantages and disadvantages of both approaches and compare their performance for the considered use case in terms of coverage and geometric dilution of precision (GDoP)
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a distributed multi-sensor integrated sensing and communication (MS-ISAC) architecture for critical infrastructure protection against drone overflights. It deploys three or more passive sniffing sensors near the protected site, connected via DL/UL to a distant illumination base station, and performs multistatic range-Doppler estimation according to the Cooperative Passive Coherent Location (CPCL) principle. The text qualitatively discusses advantages of this multistatic setup over quasi-monostatic architectures (one sniffer near the BS) in coverage and geometric dilution of precision (GDoP).
Significance. If the unverified assumptions about reliable CPCL operation hold, the multistatic architecture could offer improved sensing geometry for ISAC-based CI protection. The manuscript remains a high-level conceptual proposal without quantitative validation, limiting its immediate impact to architectural discussion.
major comments (2)
- [Abstract] Abstract: The claim that the multistatic architecture has advantages over the quasi-monostatic architecture in coverage and GDoP is presented without any supporting derivations, error analysis, simulations, or quantitative comparisons; the subsequent performance discussion therefore cannot be evaluated.
- [Abstract] Abstract: The multistatic range-Doppler estimation per the CPCL principle is asserted to be feasible over DL/UL links from distant sensors, but no analysis of required timing/phase synchronization, link-induced phase noise, coherent integration limits, or clutter rejection is supplied; this assumption is load-bearing for all coverage/GDoP claims.
minor comments (1)
- [Abstract] The abstract would benefit from explicit statements on what is proposed versus what is demonstrated, given the absence of results.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our conceptual proposal for a distributed multi-sensor ISAC architecture. We acknowledge that the manuscript is high-level and does not contain quantitative simulations or detailed technical analyses. Below we respond point-by-point and indicate the revisions we will make to clarify scope and strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that the multistatic architecture has advantages over the quasi-monostatic architecture in coverage and GDoP is presented without any supporting derivations, error analysis, simulations, or quantitative comparisons; the subsequent performance discussion therefore cannot be evaluated.
Authors: We agree that the manuscript contains no simulations, error analysis, or quantitative comparisons, consistent with its nature as a conceptual architectural proposal. The stated advantages are drawn from standard geometric properties of multistatic radar (multiple baselines improving coverage and reducing GDoP relative to a single baseline near the illuminator). In revision we will add a short subsection that supplies basic geometric derivations of coverage area and GDoP expressions for the two architectures, together with an explicit statement that numerical validation lies outside the present scope. revision: yes
-
Referee: [Abstract] Abstract: The multistatic range-Doppler estimation per the CPCL principle is asserted to be feasible over DL/UL links from distant sensors, but no analysis of required timing/phase synchronization, link-induced phase noise, coherent integration limits, or clutter rejection is supplied; this assumption is load-bearing for all coverage/GDoP claims.
Authors: The feasibility statement rests on the established CPCL framework, which assumes that communication links can convey the required reference signals for synchronization. We accept that the manuscript supplies no analysis of phase noise, timing precision, coherent integration limits, or clutter rejection. In the revised version we will insert a dedicated paragraph that enumerates these assumptions, notes their load-bearing character, and cites representative CPCL literature that addresses practical synchronization issues, thereby making the limitations transparent. revision: yes
Circularity Check
No circularity; high-level architectural proposal with no derivations or fitted quantities
full rationale
The manuscript is a conceptual discussion of multistatic vs. quasi-monostatic ISAC architectures for CI protection. It invokes the CPCL principle by name for multistatic range-Doppler estimation but supplies neither equations, parameter fits, nor self-citations that reduce any claim to its own inputs. Coverage and GDoP advantages are asserted at the architectural level without any derivation chain that could be circular. No steps match the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
and Marcus, Carina and Eriksson, Olof and Giorgetti, Andrea and Widmer, Joerg and Wymeersch, Henk , journal=
Keskin, Musa Furkan and Mojahedian, Mohammad Mahdi and Lacruz, Jesus O. and Marcus, Carina and Eriksson, Olof and Giorgetti, Andrea and Widmer, Joerg and Wymeersch, Henk , journal=. Fundamental Trade-Offs in Monostatic ISAC: A Holistic Investigation Toward 6G , year=
-
[2]
2026 , eprint=
Evaluation of gNB Monostatic Sensing for UAV Use Case , author=. 2026 , eprint=
2026
-
[3]
Langley , title =
Richard B. Langley , title =. GPS World , volume =
-
[4]
ubke and Navid Keshtiarast and Christoph Fischer and Daniel Lindenschmitt and Benedikt Geiger and Reiner S. Thom\
Victor Shatov and Benjamin Nuss and Steffen Schieler and Pradyumna Kumar Bishoyi and Lara Wimmer and Maximilian L\"ubke and Navid Keshtiarast and Christoph Fischer and Daniel Lindenschmitt and Benedikt Geiger and Reiner S. Thom\"a and Amina Fellan and Laurent Schmalen and Marina Petrova and Hans D. Schotten and Norman Franchi , title =. IEEE Access , volu...
2024
-
[5]
a and Carsten Andrich and Giovanni Del Galdo and Michael D\
Reiner S. Thom\"a and Carsten Andrich and Giovanni Del Galdo and Michael D\"obereiner and Matthias A. Hein and Martin K\"aske and G\"unter Sch\"afer and Steffen Schieler and Christian Schneider and Andreas Schwind and Philip Wendland , title =. IEEE Communications Magazine , volume =. 2019 , doi =
2019
-
[6]
a and Carsten Andrich and Michael D\
Reiner S. Thom\"a and Carsten Andrich and Michael D\"obereiner and Reza Faramarzahangari and Jonas Gedschold and Marc Francisco Colaco Miranda and Saw James Myint and Steffen Schieler and Christian Schneider and Sebastian Semper and Carsten Smeenk and Gerd Sommerkorn and Zhixiang Zhao , title =. npj Wireless Technology , volume =. 2026 , doi =
2026
-
[7]
Reliable UAV Detection with ISAC
Stefan Saur and Michael Doll and Alexander Grudnitsky and Stefano Mandelli and Luca Giroto and Markus Henninger and Thomas Wild , title =. arXiv preprint arXiv:2605.23561 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
Hao Liu and Emad Alsusa and N. T. Ali and Ala Al-Dweik , title =. IEEE Vehicular Technology Magazine , year =
-
[9]
Haimovich and Rick S
Alexander M. Haimovich and Rick S. Blum and Leonard J. Cimini , title =. IEEE Signal Processing Magazine , volume =. 2008 , doi =
2008
-
[10]
, booktitle=
Beuster, Julia and Andrich, Carsten and Giehl, Sebastian and Miranda, Marc and Mohr, Lorenz and Novotny, Dieter and Kaufmann, Tom and Schneider, Christian and Thomä, Reiner S. , booktitle=. Real-Time Sounding in ISAC Networks: Design and Implementation of a Multi-Node Testbed with Synchronized Airborne and Ground-Based Sensors , year=
-
[11]
Smeenk and Saw James Myint and Reza Faramarzahangari and Carsten Andrich and Sebastian Giehl and Christian Schneider and Reiner S
Julia Beuster and Carsten J. Smeenk and Saw James Myint and Reza Faramarzahangari and Carsten Andrich and Sebastian Giehl and Christian Schneider and Reiner S. Thom\"a , title =. 18th European Conference on Antennas and Propagation (EuCAP) , address =
-
[12]
Coordinated Multipoint JCAS in 6G Mobile Networks , year=
Su, Yanpeng and Lübke, Maximilian and Franchi, Norman , journal=. Coordinated Multipoint JCAS in 6G Mobile Networks , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.