MIMO Zak-OTFS: Channel Estimation, Detection, and Throughput Analysis
Pith reviewed 2026-06-26 00:38 UTC · model grok-4.3
The pith
MIMO Zak-OTFS derives its full system model directly from the physical multipath channel and identifies a performance crossover with CP-OFDM.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
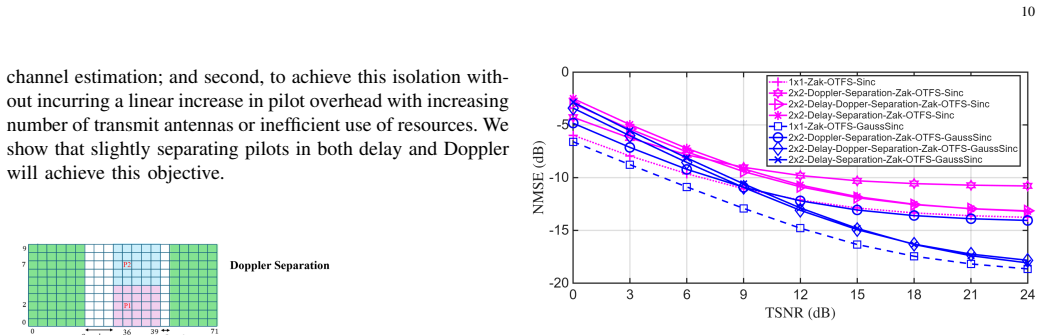
We first derive a complete system model for MIMO Zak-OTFS based directly on the physical multipath channel. We then propose an efficient channel estimation method using structured pilot placement in the delay-Doppler domain. The proposed approach demonstrates that the advantages of Zak-OTFS observed in SISO scenarios extend to MIMO systems, particularly its robustness to Doppler and inter-carrier interference. We identify a fundamental crossover behavior: CP-OFDM performs slightly better at low SNR and low Doppler, while Zak-OTFS excels at higher SNR or under severe Doppler dispersion, with the crossover points for SNR and Doppler shifting inversely to each other.
What carries the argument
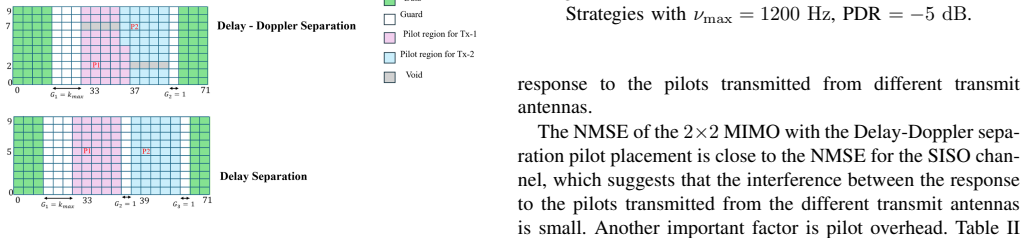
The complete system model for MIMO Zak-OTFS obtained by direct mapping from the physical multipath channel, which enables structured pilot placement in the delay-Doppler domain for channel estimation.
If this is right
- Zak-OTFS maintains its Doppler and ICI robustness when extended from SISO to MIMO.
- CP-OFDM is preferable only below the identified SNR and Doppler thresholds; Zak-OTFS is preferable above them.
- Crossover SNR and crossover Doppler are inversely related, so raising one threshold lowers the other.
- Zak-OTFS exhibits increased sensitivity to high pilot-to-data power ratios compared with CP-OFDM while sharing the same optimal ratio.
Where Pith is reading between the lines
- Pilot design rules developed here could be tested on other delay-Doppler waveforms to check whether the same crossover pattern appears.
- If hardware impairments shift the reported crossover points, the model would need an additional impairment term before being used for link adaptation.
- Throughput gains at high Doppler suggest the framework may favor Zak-OTFS in vehicular or high-speed train scenarios once the pilot overhead is accounted for.
Load-bearing premise
The standardized CDL-C channel model together with the chosen structured pilot placement accurately reproduces the estimation accuracy and interference behavior that would appear in real deployments without unmodeled hardware impairments or synchronization errors.
What would settle it
Measurements in an actual high-mobility MIMO deployment that produce crossover SNR or Doppler values different from those obtained under the CDL-C model with the same pilot structure.
Figures


read the original abstract
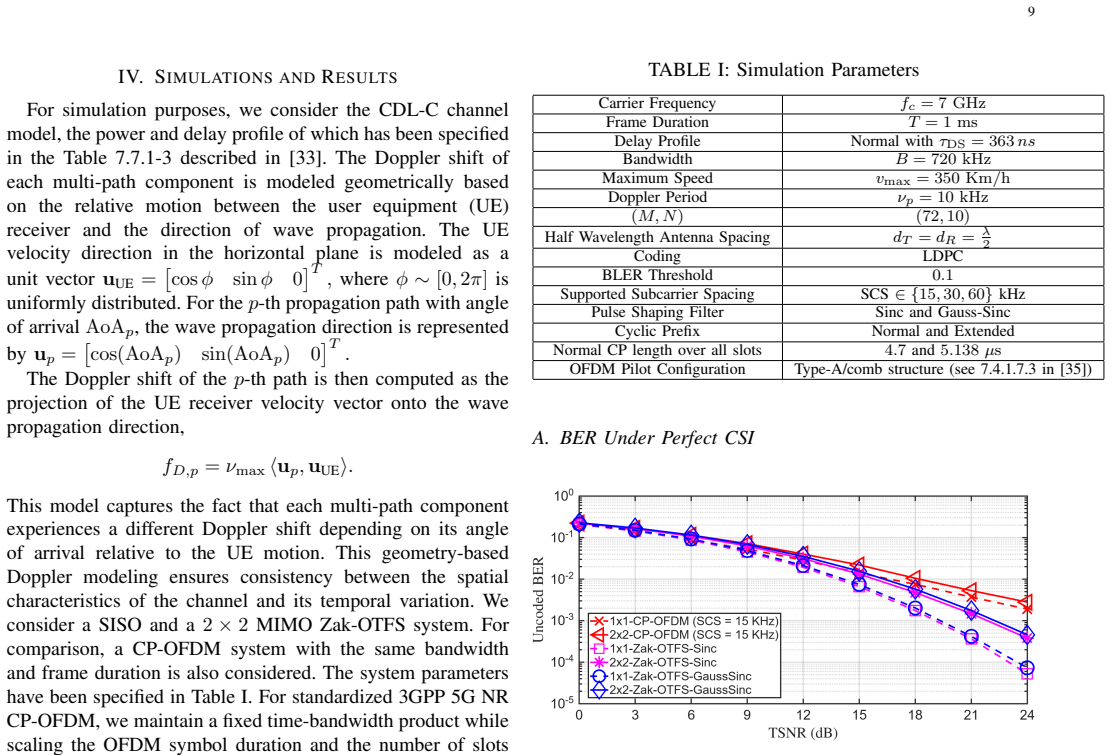
Zak-Orthogonal Time Frequency Space (Zak-OTFS) modulation has demonstrated substantial performance gains over cyclic-prefix orthogonal frequency-division multiplexing (CP-OFDM) in highly time- and frequency-selective channels. In this paper, we extend Zak-OTFS to a multiple-input multiple-output (MIMO) framework. We first derive a complete system model for MIMO Zak-OTFS based directly on the physical multipath channel; ours is the first work to do so. We then propose an efficient channel estimation method using structured pilot placement in the delay-Doppler (DD) domain. The proposed approach is evaluated under the standardized CDL-C channel model, demonstrating that the advantages of Zak-OTFS observed in SISO scenarios extend to MIMO systems, particularly its robustness to Doppler and inter-carrier interference (ICI). We identify a fundamental crossover behavior: CP-OFDM performs slightly better at low SNR and low Doppler, while Zak-OTFS excels at higher SNR or under severe Doppler dispersion. Furthermore, we show that the crossover points for SNR and Doppler shift inversely to each other. We also observe that Zak-OTFS, particularly with MIMO, exhibits increased sensitivity to high values of pilot-to-data power ratio (PDR), but has a similar optimal PDR as CP-OFDM.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends Zak-OTFS to MIMO by deriving a complete system model directly from the physical multipath channel (claimed as the first such derivation), proposes an efficient DD-domain channel estimation scheme using structured pilot placement, and evaluates the approach under the standardized CDL-C model. It reports that Zak-OTFS advantages over CP-OFDM extend to MIMO, with a crossover behavior where CP-OFDM is slightly better at low SNR/low Doppler while Zak-OTFS excels at higher SNR or severe Doppler (with inverse crossover dependence), plus increased sensitivity to high PDR values but similar optimal PDR.
Significance. If the system model derivation is complete and the simulation results hold under the stated assumptions, the work would provide a useful analytical and practical foundation for MIMO Zak-OTFS in doubly-selective channels, clarifying operating regimes relative to CP-OFDM and highlighting PDR sensitivity. The use of a standardized channel model aids reproducibility, though the absence of machine-checked proofs or open code is noted.
major comments (2)
- [Numerical results section] Numerical results / simulation setup (around the crossover SNR/Doppler figures): the reported crossover points and MIMO robustness claims rest on idealized CDL-C simulations with structured DD pilots; the manuscript does not model hardware impairments (phase noise, I/Q imbalance, residual timing/frequency offsets) that would alter effective Doppler/ICI statistics and could shift or eliminate the claimed advantage regions.
- [Channel estimation and detection sections] Channel estimation and detection sections: while the system model is derived from the physical multipath channel, the evaluation of estimation accuracy and throughput does not include an ablation or sensitivity analysis showing how unmodeled synchronization errors would affect the PDR sensitivity and crossover observations.
minor comments (2)
- [System model] Notation for MIMO channel matrices and DD-domain transformations should be cross-checked for consistency between the system model derivation and the simulation parameter tables.
- [Figures in numerical results] Figure captions for throughput vs. SNR/Doppler curves should explicitly state the number of Monte Carlo realizations and whether error bars are shown.
Simulated Author's Rebuttal
Thank you for the constructive comments on our manuscript. We address the major comments point by point below, clarifying the scope and assumptions of the work.
read point-by-point responses
-
Referee: [Numerical results section] Numerical results / simulation setup (around the crossover SNR/Doppler figures): the reported crossover points and MIMO robustness claims rest on idealized CDL-C simulations with structured DD pilots; the manuscript does not model hardware impairments (phase noise, I/Q imbalance, residual timing/frequency offsets) that would alter effective Doppler/ICI statistics and could shift or eliminate the claimed advantage regions.
Authors: The numerical results are obtained under the standardized CDL-C channel model with the assumptions of the derived system model, which is standard practice for establishing baseline performance in doubly selective channels. Hardware impairments such as phase noise or I/Q imbalance are not modeled, as incorporating them would require additional specific impairment models and parameters outside the current scope focused on the MIMO Zak-OTFS derivation and DD-domain estimation. The reported crossover points and robustness claims hold under these conditions; extensions to include impairments are left for future work. revision: no
-
Referee: [Channel estimation and detection sections] Channel estimation and detection sections: while the system model is derived from the physical multipath channel, the evaluation of estimation accuracy and throughput does not include an ablation or sensitivity analysis showing how unmodeled synchronization errors would affect the PDR sensitivity and crossover observations.
Authors: The system model derivation and subsequent evaluation assume ideal synchronization, consistent with the physical multipath channel model used throughout the paper. No ablation study on synchronization errors is included because such errors are not part of the stated model assumptions, and modeling their distributions would require additional analysis beyond the paper's focus on channel estimation accuracy and throughput under CDL-C. The PDR sensitivity and crossover observations are presented under the given assumptions; sensitivity to synchronization errors can be investigated in follow-on studies. revision: no
Circularity Check
No significant circularity; derivation from physical channel is independent
full rationale
The paper states it derives the MIMO Zak-OTFS system model directly from the physical multipath channel (first such work). Channel estimation and performance claims rest on evaluation under the external standardized CDL-C model, with no evidence of fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations in the derivation chain. The central claims (crossover behavior, robustness) are simulation-based against an independent benchmark rather than reducing to the paper's own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
6G wireless networks: Vision, requirements, architecture, and key technologies,
Z. Zhang, Y . Xiao, Z. Ma, M. Xiao, Z. Ding, P. Fan, A. Nallanathan, and H. V . Poor, “6G wireless networks: Vision, requirements, architecture, and key technologies,”IEEE Vehicular Technology Magazine, vol. 14, no. 3, pp. 28–41, September 2019
2019
-
[2]
6G takes shape,
J. G. Andrews, T. E. Humphreys, and T. Ji, “6G takes shape,”IEEE BITS the Information Theory Magazine, vol. 4, no. 1, pp. 2–24, March 2024
2024
-
[3]
6G for Vehicle-to-Everything (V2X) communications: Enabling tech- nologies, challenges, and opportunities,
M. Noor-A-Rahim, A. Tassi, M. Arore, H. F. Safi, H. Zhou, M. M. U. Chowdhury, Y . L. Guan, S. Sun, J. S. Thompson, and M. D. Renzo, “6G for Vehicle-to-Everything (V2X) communications: Enabling tech- nologies, challenges, and opportunities,”Proceedings of the IEEE, vol. 110, no. 6, pp. 712–734, June 2022
2022
-
[4]
A survey on the role of artificial intelligence and machine learning in 6G-V2X applications,
D. Wang, A. Qiu, Q. Zhou, and H. D. Schotten, “A survey on the role of artificial intelligence and machine learning in 6G-V2X applications,” in2025 IEEE 11th World Forum on Internet of Things (WF-IoT), 2025, pp. 1–7
2025
-
[5]
Spectrum opportunities for the wireless future: From direct-to-device satellite applications to 6G cellular,
Rappaport, T. S., Humphreys, T. E. & Nie, S., “Spectrum opportunities for the wireless future: From direct-to-device satellite applications to 6G cellular,”npj Wirel Technol, vol. 1, p. 8, 2025
2025
-
[6]
Low-complexity equalization of OFDM in doubly selective channels,
P. Schniter, “Low-complexity equalization of OFDM in doubly selective channels,”IEEE Transactions on Signal Processing, vol. 52, no. 4, pp. 1002–1011, 2004
2004
-
[7]
Orthogonal Time Frequency Space Modulation,
R. Hadani, A. Monk, M. Tsatsanis, A. J. Goldsmith, S. Shamai, and M. F. Wong, “Orthogonal Time Frequency Space Modulation,” inProc. IEEE WCNC, Mar 2017, pp. 1–6
2017
-
[8]
Orthogonal time frequency space (OTFS) and delay-Doppler signal processing,
IEEE Communications Society, “Orthogonal time frequency space (OTFS) and delay-Doppler signal processing,” IEEE ComSoc Best Readings, Jun. 2022. [Online]. Avail- able: https://www.comsoc.org/publications/best-readings/orthogonal- time-frequency-space-otfs-and-delay-doppler-signal-processing
2022
-
[9]
OTFS: A new generation of modulation addressing the challenges of 5G,
R. Hadani and A. Monk, “OTFS: A new generation of modulation addressing the challenges of 5G,” 2018, arXiv:1802.02623 [cs.IT]
Pith/arXiv arXiv 2018
-
[10]
OTFS—A mathematical foundation for communication and radar sens- ing in the delay-Doppler domain,
S. K. Mohammed, R. Hadani, A. Chockalingam, and R. Calderbank, “OTFS—A mathematical foundation for communication and radar sens- ing in the delay-Doppler domain,”IEEE BITS the Information Theory Magazine, vol. 2, no. 2, pp. 36–55, 2022
2022
-
[11]
S. K. Mohammed, R. Hadani, and A. Chockalingam,OTFS Modulation – Theory and Applications. IEEE Press – Wiley, Nov. 2024
2024
-
[12]
Does 6G need a new waveform: Comparing Zak-OTFS with CP-OFDM,
I. A. Khan, S. K. Mohammed, R. Hadani, A. Chockalingam, R. Calder- bank, A. Monk, S. Kons, S. Rakib, and Y . Hebron, “Does 6G need a new waveform: Comparing Zak-OTFS with CP-OFDM,” 2026, arXiv:2601.15602 [eess.SP]
arXiv 2026
-
[13]
OTFS: predictability in the Delay-Doppler domain and its value to communication and radar sensing,
S. K. Mohammed, R. Hadani, A. Chockalingam, and R. Calderbank, “OTFS: predictability in the Delay-Doppler domain and its value to communication and radar sensing,”IEEE BITS the Information Theory Magazine, vol. 3, no. 2, pp. 7–31, Jun 2023
2023
-
[14]
Zak-OTFS and LDPC codes,
B. Dabak, V . Khammammetti, S. K. Mohammed, and R. Calderbank, “Zak-OTFS and LDPC codes,” inProceedings of the IEEE International Conference on Communications (ICC), June 2024, pp. 3785–3790
2024
-
[15]
Next generation 5G wireless networks: A comprehensive survey,
M. Agiwal, A. Roy, and N. Saxena, “Next generation 5G wireless networks: A comprehensive survey,”IEEE Communications Surveys & Tutorials, vol. 18, no. 3, pp. 1617–1655, 2016
2016
-
[16]
What will 5G be?
J. G. Andrews, S. Buzzi, W. Choi, S. V . Hanly, A. Lozano, A. C. K. Soong, and J. C. Zhang, “What will 5G be?”IEEE Journal on Selected Areas in Communications, vol. 32, no. 6, pp. 1065–1082, 2014
2014
-
[17]
Massive MIMO for next generation wireless systems,
E. G. Larsson, O. Edfors, F. Tufvesson, and T. L. Marzetta, “Massive MIMO for next generation wireless systems,”IEEE Communications Magazine, vol. 52, no. 2, pp. 186–195, 2014
2014
-
[18]
The road towards 6G: A comprehensive survey,
W. Jiang, B. Han, M. A. Habibi, and H. D. Schotten, “The road towards 6G: A comprehensive survey,”IEEE Open Journal of the Communications Society, vol. 2, pp. 334–366, 2021
2021
-
[19]
6G wireless systems: Vision, requirements, challenges, insights, and opportunities,
H. Tataria, M. Shafi, A. F. Molisch, M. Dohler, H. Sj ¨oland, and F. Tufvesson, “6G wireless systems: Vision, requirements, challenges, insights, and opportunities,”Proceedings of the IEEE, vol. 109, no. 7, pp. 1166–1199, 2021
2021
-
[20]
Zak-OTFS with time-domain offset gradient descent equalization,
H. Zhang, X. Huang, and J. A. Zhang, “Zak-OTFS with time-domain offset gradient descent equalization,”IEEE Transactions on Vehicular Technology, 2025
2025
-
[21]
Low-complexity equalization of Zak-OTFS in the frequency domain,
Mattu, S. R., Mehrotra, N., Khan Mohammed, S. et al., “Low-complexity equalization of Zak-OTFS in the frequency domain,”npj Wireless Technology, vol. 2, p. 9, 2026
2026
-
[22]
Zak-OTFS: Pulse shaping and the tradeoff between time/bandwidth expansion and predictability,
J. Jayachandran, R. K. Jaiswal, S. Khan Mohammed, R. Hadani, A. Chockalingam, and R. Calderbank, “Zak-OTFS: Pulse shaping and the tradeoff between time/bandwidth expansion and predictability,” 2024, arXiv:2405.02718 [eess.SP]
arXiv 2024
-
[23]
Zak-OTFS to integrate sensing the I/O relation and data communication,
M. Ubadah, S. K. Mohammed, R. Hadani, S. Kons, A. Chockalingam, and R. Calderbank, “Zak-OTFS to integrate sensing the I/O relation and data communication,” 2025, arXiv:2404.04182 [eess.SP]
arXiv 2025
-
[24]
A Gaussian-Sinc pulse shaping filter for Zak-OTFS,
A. Das, F. Jesbin, and A. Chockalingam, “A Gaussian-Sinc pulse shaping filter for Zak-OTFS,”IEEE Transactions on Vehicular Technology, vol. 75, no. 3, pp. 4307–4322, 2026
2026
-
[25]
Closed-form expressions for I/O relation in Zak-OTFS with different Delay-Doppler filters,
——, “Closed-form expressions for I/O relation in Zak-OTFS with different Delay-Doppler filters,”IEEE Transactions on Vehicular Tech- nology, vol. 74, no. 9, pp. 14 250–14 266, September 2025
2025
-
[26]
Zak-OTFS Implementation via Time and Frequency Windowing,
S. Gopalam, I. B. Collings, S. V . Hanly, H. Inaltekin, S. R. B. Pillai, and P. Whiting, “Zak-OTFS Implementation via Time and Frequency Windowing,”IEEE Transactions on Communications, vol. 72, no. 7, pp. 3873–3889, Jul. 2024
2024
-
[27]
Optimal Zak-OTFS Receiver and Its Relation to the Radar Matched Filter,
S. Gopalam, H. Inaltekin, I. B. Collings, and S. V . Hanly, “Optimal Zak-OTFS Receiver and Its Relation to the Radar Matched Filter,”IEEE Open Journal of the Communications Society, vol. 5, pp. 4462–4482, 2024
2024
-
[28]
S. K. Mohammed, S. Prakash, M. Ubadah, I. A. Khan, R. Hadani, S. Rakib, S. Kons, Y . Hebron, A. Chockalingam, and R. Calderbank, “Zak-OTFS over CP-OFDM,” 2025, arXiv:2508.03906 [eess.SP]
arXiv 2025
-
[29]
MIMO-OTFS in high- Doppler fading channels: Signal detection and channel estimation,
M. K. Ramachandran and A. Chockalingam, “MIMO-OTFS in high- Doppler fading channels: Signal detection and channel estimation,” in Proc. IEEE GLOBECOM, Dec 2018, pp. 206–212
2018
-
[30]
MIMO-Zak-OTFS in doubly-selective channels: I/O relation estimation and detection,
A. Bairwa and A. Chockalingam, “MIMO-Zak-OTFS in doubly-selective channels: I/O relation estimation and detection,” inProceedings of the IEEE Vehicular Technology Conference, June 2025, pp. 1–6
2025
-
[31]
MIMO-Zak-OTFS with superimposed spread pilots,
——, “MIMO-Zak-OTFS with superimposed spread pilots,” 2025, arXiv:2510.20734 [cs.IT]
arXiv 2025
-
[32]
Characterization of randomly time-variant linear channels,
P. A. Bello, “Characterization of randomly time-variant linear channels,” IEEE Transactions on Communication Systems, vol. 11, no. 4, pp. 360– 393, 1963
1963
-
[33]
Study on channel model for frequencies from 0.5 to 100 GHz,
3rd Generation Partnership Project (3GPP), “Study on channel model for frequencies from 0.5 to 100 GHz,” ETSI, Technical Report TR 38.901 V19.1.0, Oct. 2025, release 19
2025
-
[34]
Technical Specification Group Radio Access Network; NR; Physical Layer Procedures for Data (Release 16),
3GPP, “Technical Specification Group Radio Access Network; NR; Physical Layer Procedures for Data (Release 16),” 3GPP TS 38.214, version 16.2.0, 2020
2020
-
[35]
NR; Physical Channels and Modulation,
——, “NR; Physical Channels and Modulation,” 3rd Generation Part- nership Project (3GPP), Tech. Rep. TS 38.211, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.