Networked Control System Under Controller-Actuator Channel Jamming
Pith reviewed 2026-06-25 19:49 UTC · model grok-4.3
The pith
An adaptive jammer observing transmission successes can degrade control performance with limited budget, but an event-triggered defense reduces the impact even without channel knowledge.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
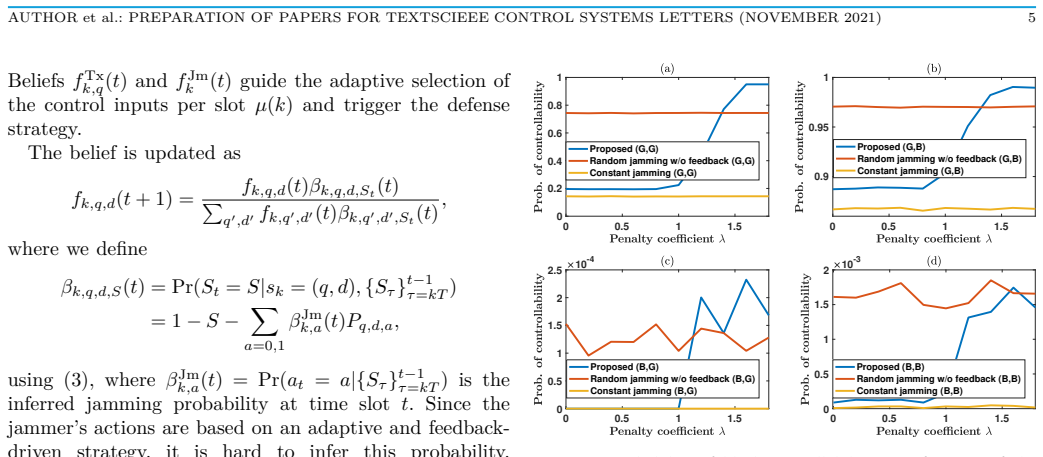
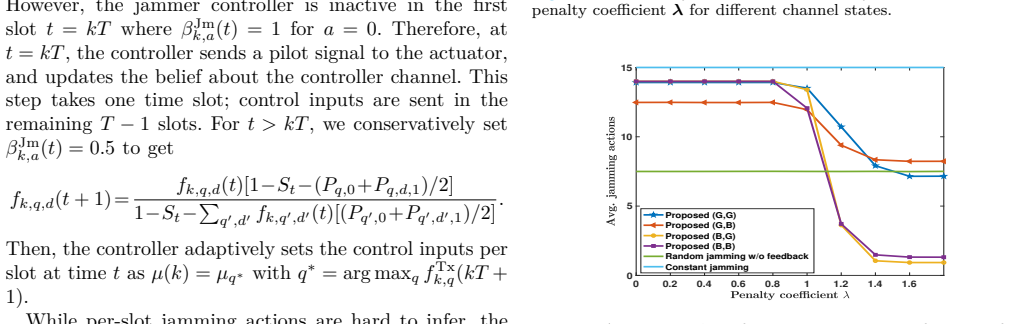
Optimal adaptive jamming attacks, formed by updating beliefs from transmission outcomes, can significantly degrade control performance even with a limited budget, while an event-triggered defense scheme reduces this impact even when the controller lacks channel state knowledge.
What carries the argument
The belief-forming adaptive jamming strategy that optimizes under limited budget based on transmission success observations, countered by the event-triggered defense scheme.
Load-bearing premise
The jammer can observe the success or failure of each controller transmission to form beliefs about channel states.
What would settle it
An experiment or simulation where the adaptive jamming fails to degrade performance more than a random jamming strategy with the same budget, or where the defense provides no improvement.
Figures


read the original abstract
Wireless channels in the networked control systems are vulnerable to intentional interference, such as jamming attacks. This paper investigates jamming attacks on the wireless controller actuator channel of a control system that can tolerate occasional control inputs from the controller. We start with a worst case scenario for the jammer where the controller knows its channel state. We develop an adaptive jamming strategy in which the jammer, observing the success or failure of each controller transmission, forms beliefs about its own and the controller actuator channel states. Using this belief, it optimizes its actions under a limited jamming budget. To counter this, we develop an event-triggered defense scheme for the controller in two settings: with and without the knowledge of its channel state. Simulation results show that optimal adaptive jamming attacks can significantly degrade control performance, even with a limited budget, while the defense scheme, even without channel state knowledge, can effectively reduce this impact.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies jamming on the controller-actuator wireless channel in a networked control system that tolerates occasional missed inputs. It develops an adaptive jamming policy in which the jammer observes each transmission outcome to maintain beliefs over its own and the C-A channel states, then solves a per-step optimization under a jamming budget. An event-triggered defense is proposed for the controller both with and without channel-state knowledge. Simulations are used to show that the adaptive jamming degrades performance even with limited budget while the defense reduces the impact.
Significance. If the results hold, the work adds to the literature on secure networked control by combining belief-based adaptive attack design with event-triggered defense. The simulation evidence for degradation and mitigation is a concrete strength that supports the practical relevance of the claims.
major comments (2)
- [Adaptive jamming strategy section] Adaptive jamming strategy section: The belief recursion and per-step optimization are constructed under the assumption that the jammer perfectly observes the success or failure of every controller transmission. All reported simulation results on performance degradation are generated in this perfect-observation regime; the manuscript provides no analysis or additional simulations under noisy or partial observations, so the load-bearing claim that 'optimal adaptive jamming attacks can significantly degrade control performance' remains conditional on this strong assumption.
- [Simulation results section] Simulation results section: The quantitative degradation and mitigation claims rest on the specific belief-update and optimization procedure; without an explicit statement of the channel model parameters, belief initialization, and budget values used in the figures, it is not possible to assess whether the reported effect sizes are robust or sensitive to those choices.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and presentation of our results. We address each major comment below.
read point-by-point responses
-
Referee: [Adaptive jamming strategy section] Adaptive jamming strategy section: The belief recursion and per-step optimization are constructed under the assumption that the jammer perfectly observes the success or failure of every controller transmission. All reported simulation results on performance degradation are generated in this perfect-observation regime; the manuscript provides no analysis or additional simulations under noisy or partial observations, so the load-bearing claim that 'optimal adaptive jamming attacks can significantly degrade control performance' remains conditional on this strong assumption.
Authors: The adaptive jamming strategy is explicitly developed under the perfect-observation assumption, which we present as the worst-case scenario for the jammer (see Section III). This modeling choice is stated upfront and the performance-degradation claims are made under that regime. We agree that the results are conditional on perfect observation and will revise the manuscript to emphasize this scope more clearly in the abstract, introduction, and conclusion. Extending the belief recursion and optimization to noisy or partial observations is a natural next step but lies outside the current contribution; we will note it as future work rather than add new simulations at this stage. revision: partial
-
Referee: [Simulation results section] Simulation results section: The quantitative degradation and mitigation claims rest on the specific belief-update and optimization procedure; without an explicit statement of the channel model parameters, belief initialization, and budget values used in the figures, it is not possible to assess whether the reported effect sizes are robust or sensitive to those choices.
Authors: We acknowledge that the simulation section does not list all numerical parameters (channel transition probabilities, initial belief vectors, and exact budget values) in the text or captions. In the revised manuscript we will add a dedicated simulation-parameters subsection (or table) that reports these values for every figure, enabling readers to reproduce the experiments and evaluate sensitivity. revision: yes
Circularity Check
No significant circularity; models and simulations are self-contained
full rationale
The paper constructs explicit adaptive jamming policies from the jammer's observation model and budget constraint, then evaluates them via simulation against an event-triggered defense. No equations reduce a claimed prediction to a fitted input by construction, no self-citation chain bears the central result, and no ansatz or uniqueness claim is smuggled in. The derivation chain (belief update → per-step optimization → performance metric) remains independent of the reported outcomes.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The Byzantine generals problem,
L. Lamport, R. Shostak, and M. Pease, “The Byzantine generals problem,” in Concurrency: The Works of Leslie Lamport, 2019, pp. 203–226
2019
-
[2]
Denial-of-service in wire- less sensor networks: Attacks and defenses,
D. R. Raymond and S. F. Midkiff, “Denial-of-service in wire- less sensor networks: Attacks and defenses,” IEEE Pervasive Comput., vol. 7, no. 1, pp. 74–81, 2008
2008
-
[3]
Optimal power allocation and scheduling under jamming attacks,
S. D’Oro, E. Ekici, and S. Palazzo, “Optimal power allocation and scheduling under jamming attacks,” IEEE/ACM Trans. Netw., vol. 25, no. 3, pp. 1310–1323, 2016
2016
-
[4]
Jamming attacks on remote state estimation in cyber-physical systems: A game-theoretic approach,
Y. Li, L. Shi, P. Cheng, J. Chen, and D. E. Quevedo, “Jamming attacks on remote state estimation in cyber-physical systems: A game-theoretic approach,” IEEE Trans. Autom. Control, vol. 60, no. 10, pp. 2831–2836, 2015
2015
-
[5]
SINR-based DoS attack on remote state estimation: A game-theoretic approach,
Y. Li, D. E. Quevedo, S. Dey, and L. Shi, “SINR-based DoS attack on remote state estimation: A game-theoretic approach,” IEEE Trans. Control Netw. Syst., vol. 4, no. 3, pp. 632–642, 2017
2017
-
[6]
On event-triggered con- trol of linear systems under periodic denial-of-service jamming attacks,
H. Shisheh Foroush and S. Martínez, “On event-triggered con- trol of linear systems under periodic denial-of-service jamming attacks,” in Proc. IEEE Conf. Decis. Control, 2012, pp. 2551– 2556
2012
-
[7]
Observer-based event-triggered control for networked linear systems subject to denial-of-service attacks,
S. Hu, D. Yue, Q.-L. Han, X. Xie, X. Chen, and C. Dou, “Observer-based event-triggered control for networked linear systems subject to denial-of-service attacks,” IEEE Trans. Cy- bern., vol. 50, no. 5, pp. 1952–1964, 2020
1952
-
[8]
On triggering control of single-input linear systems under pulse-width modulated DoS signals,
H. Shisheh Foroush and S. Martínez, “On triggering control of single-input linear systems under pulse-width modulated DoS signals,” SIAM J. Control Optim., vol. 54, no. 6, pp. 3084–3105, 2016
2016
-
[9]
Input-to-state stabilizing control under denial-of-service,
C. De Persis and P. Tesi, “Input-to-state stabilizing control under denial-of-service,” IEEE Trans. Autom. Control, vol. 60, no. 11, pp. 2930–2944, 2015
2015
-
[10]
A jamming-resilient algorithm for self-triggered network coordination,
D. Senejohnny, P. Tesi, and C. De Persis, “A jamming-resilient algorithm for self-triggered network coordination,” IEEE Trans. Control Netw. Syst., vol. 5, no. 3, pp. 981–990, 2017
2017
-
[11]
Co- design of dynamic event-triggered communication scheme and resilient observer-based control under aperiodic DoS attacks,
S. Hu, D. Yue, Z. Cheng, E. Tian, X. Xie, and X. Chen, “Co- design of dynamic event-triggered communication scheme and resilient observer-based control under aperiodic DoS attacks,” IEEE Trans. Cybern., vol. 51, no. 9, pp. 4591–4601, 2021. AUTHOR et al.: PREPARATION OF PAPERS FOR TEXTSCIEEE CONTROL SYSTEMS LETTERS (NOVEMBER 2021) 7
2021
-
[12]
Dynamic event- triggered cluster consensus for multiagent systems under DoS attacks with antagonistic interactions,
S. Zhou, Y. Liu, X. Lu, W. Li, and J. Long, “Dynamic event- triggered cluster consensus for multiagent systems under DoS attacks with antagonistic interactions,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 55, no. 6, pp. 4362–4374, 2025
2025
-
[13]
Resilient event- triggered control for networked cascade control systems under denial-of-service attacks and actuator saturation,
N. Zhao, P. Shi, W. Xing, and R. K. Agarwal, “Resilient event- triggered control for networked cascade control systems under denial-of-service attacks and actuator saturation,” IEEE Syst. J., vol. 16, no. 1, pp. 1114–1122, 2022
2022
-
[14]
Cyber-resilient control of an islanded microgrid under latency attacks and random DoS attacks,
W. Yao, Y. Wang, Y. Xu, and C. Deng, “Cyber-resilient control of an islanded microgrid under latency attacks and random DoS attacks,” IEEE Trans. Ind. Inform., vol. 19, no. 4, pp. 5858– 5869, 2023
2023
-
[15]
Stochastic stability analysis and control of secondary frequency regulation for islanded microgrids under random denial of service attacks,
S. Liu, Z. Hu, X. Wang, and L. Wu, “Stochastic stability analysis and control of secondary frequency regulation for islanded microgrids under random denial of service attacks,” IEEE Trans. Ind. Inform., vol. 15, no. 7, pp. 4066–4075, 2019
2019
-
[16]
A survey of planar underactuated mechanical system,
Z. Huang, C. Yu, B. Zeng, X. Gong, and H. Zhou, “A survey of planar underactuated mechanical system,” Machines, vol. 12, no. 12, p. 829, 2024
2024
-
[17]
Controllability of dynamical systems. a survey,
J. Klamka, “Controllability of dynamical systems. a survey,” Bull. Pol. Acad. Sci., Tech. Sci., vol. 61, no. 2, 2013
2013
-
[18]
Poisson networked control systems: Statistical analysis and online learning for channel access,
G. Ghatak, G. Joseph, and C. Quan, “Poisson networked control systems: Statistical analysis and online learning for channel access,” in Int. Symp. Model. Optim. Mob. Ad Hoc Wireless Netw., 2024, pp. 62–69
2024
-
[19]
Channel access strategies for control-communication co- designed networks,
——, “Channel access strategies for control-communication co- designed networks,” IEEE Trans. Control Netw. Syst., pp. 1–12, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.