End-to-End Learning of Quantum Control on Latent Dynamical Manifold
Pith reviewed 2026-06-29 04:27 UTC · model grok-4.3
The pith
An LSTM on a learned latent manifold maps initial quantum states and noise parameters directly to trajectories and control pulses in one forward pass.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
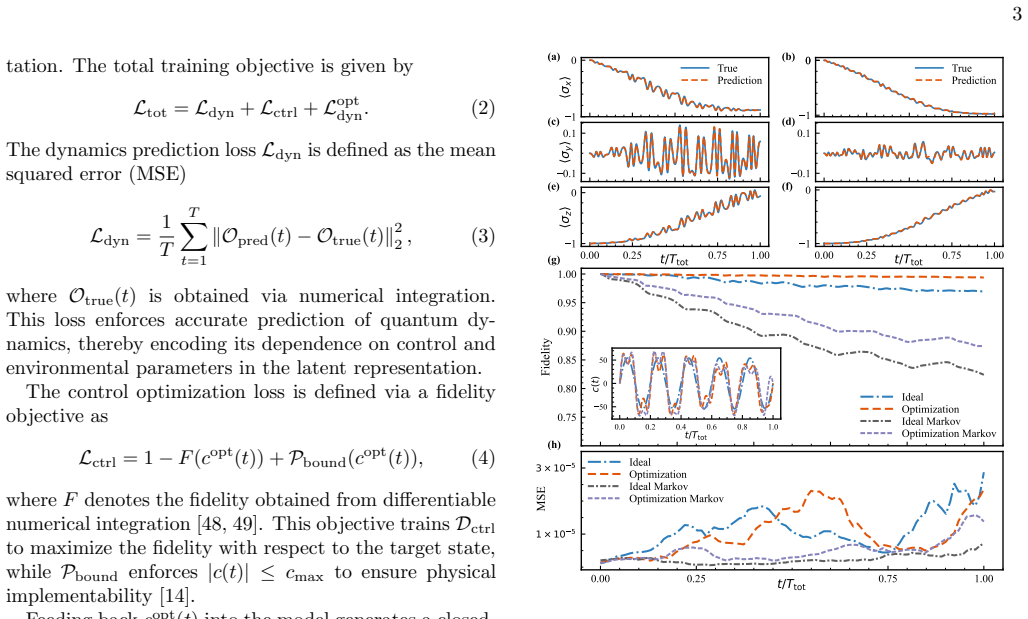
The central claim is that a long short-term memory network trained on trajectories can embed the relevant open-system dynamics into a low-dimensional latent manifold, from which both future states and the corresponding optimized control pulses can be decoded directly from initial conditions and environmental parameters, eliminating iterative optimization.
What carries the argument
LSTM encoder-decoder operating on a low-dimensional latent dynamical manifold that jointly represents open-system evolution and control strategy.
If this is right
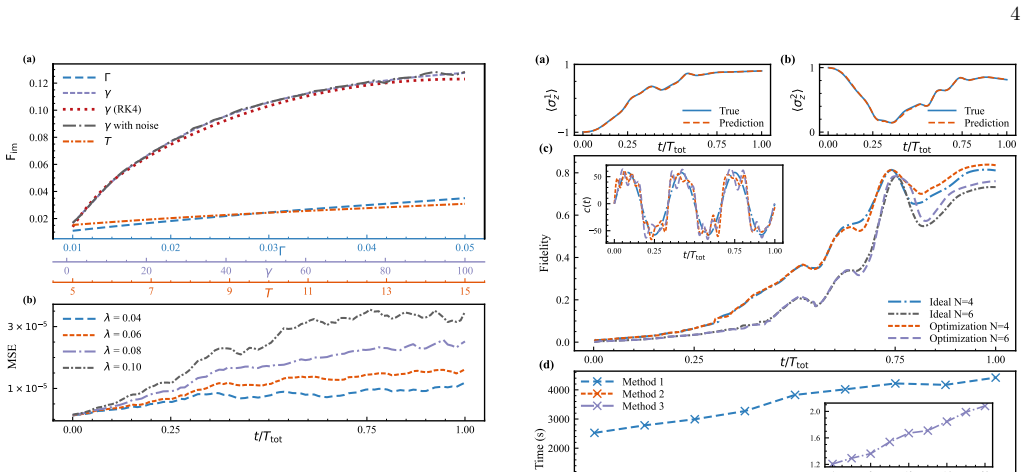
- Fidelity increases on both the adiabatic speedup task and the spin-chain state transfer task relative to conventional methods.
- Optimization cost drops by three orders of magnitude because no iterative simulation loop is required after training.
- The network generalizes to multi-parameter time-varying noise, unseen initial states, and different driving fields without retraining.
- Real-time adaptive control becomes feasible for open quantum systems whose size or noise complexity renders repeated optimization intractable.
Where Pith is reading between the lines
- If the latent dimension remains small when system size grows, the same architecture could scale to larger many-body systems where conventional optimal control fails.
- The learned manifold might be inspected post-training to extract simplified effective models of the controlled open dynamics.
- Coupling the trained network to experimental feedback loops could enable online recalibration when the physical noise deviates from the training distribution.
Load-bearing premise
A low-dimensional latent manifold extracted from training trajectories is sufficient to represent the dynamics needed for control optimization across the tested noise levels and system sizes.
What would settle it
A concrete test would be to generate new initial states and time-varying noise parameters outside the training distribution, run the model once, and compare its predicted trajectories against exact numerical integration; large systematic deviations would falsify the claim that the manifold captures the relevant dynamics.
Figures






read the original abstract
Traditional quantum control relies on an iterative "simulate-then-optimize" paradigm, where dynamics simulation and control design are decoupled, leading to substantial computational overhead and limited scalability, particularly in noisy environments. Here, we propose an end-to-end quantum control framework based on long short-term memory, in which system dynamics and control strategies are learned jointly in a low dimensional latent manifold. The model directly maps initial states and environmental parameters to both dynamical trajectories and optimized control pulse in a single forward pass. The framework is validated on adiabatic speedup in a two-level system and state transfer in a one-dimensional spin chain under noise, achieving accurate dynamical prediction and control optimization. It improves the fidelity for both tasks and significantly reduces the optimization cost by three orders of magnitude compared with conventional iterative methods, while exhibiting strong generalization to multi-parameter, time-varying noise, as well as to different initial states and driving fields. Our work introduces a data-driven control paradigm based on latent manifold learning, reducing the computational bottleneck of iterative optimization and enabling real-time adaptive control of complex open quantum systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces an end-to-end LSTM-based framework for quantum control that jointly learns open-system dynamics and optimized control pulses within a low-dimensional latent dynamical manifold. The model maps initial states and environmental parameters directly to trajectories and control fields in one forward pass. It is validated on adiabatic speedup for a two-level system and state transfer in a noisy 1D spin chain, claiming higher fidelity than conventional methods together with a three-order-of-magnitude reduction in optimization cost and generalization across multi-parameter time-varying noise, different initial states, and driving fields.
Significance. If the performance claims hold under rigorous verification, the work could enable real-time adaptive control for open quantum systems by eliminating iterative simulate-then-optimize loops. The joint learning of dynamics and control on a latent manifold represents a data-driven alternative to traditional optimal-control techniques. Credit is due for the reported generalization tests across noise regimes and system sizes, which go beyond single-task demonstrations common in the literature.
major comments (2)
- [Abstract, §5] Abstract and §5 (results): The central performance claims of improved fidelity and 1000× speedup are stated without reported error bars, training-set sizes, number of independent runs, or explicit baseline comparisons (e.g., GRAPE or Krotov iterations with identical noise realizations). This absence makes it impossible to judge whether the gains are statistically robust or sensitive to post-hoc data selection.
- [§4.2, §5.3] §4.2 (latent-manifold construction) and §5.3 (generalization tests): The claim that the learned manifold faithfully captures relevant open-system dynamics rests on training trajectories alone. No explicit check is provided that the reduced representation preserves positivity or phase information for noise correlations outside the training distribution (e.g., non-Markovian kernels with longer memory times), which is load-bearing for the optimality of the inferred control pulses.
minor comments (2)
- [§3] Notation for the latent state dimension and the precise form of the loss function (reconstruction plus control) should be introduced earlier and used consistently.
- [Figures 3–5] Figure captions should state the number of test trajectories and the precise noise-parameter ranges used for each panel.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive evaluation of the work's potential. We respond to each major comment below with clarifications and commitments to revisions that address the raised concerns directly.
read point-by-point responses
-
Referee: [Abstract, §5] Abstract and §5 (results): The central performance claims of improved fidelity and 1000× speedup are stated without reported error bars, training-set sizes, number of independent runs, or explicit baseline comparisons (e.g., GRAPE or Krotov iterations with identical noise realizations). This absence makes it impossible to judge whether the gains are statistically robust or sensitive to post-hoc data selection.
Authors: We agree that the submitted manuscript does not report error bars, the number of independent runs, training-set sizes, or side-by-side baseline comparisons with identical noise realizations in the abstract and §5. This omission limits evaluation of statistical robustness. In the revised manuscript we will add standard deviations computed over multiple independent training runs (minimum of five seeds), explicitly state the training-set sizes used for each task, and include direct fidelity and runtime comparisons against GRAPE and Krotov executed on the same noise realizations. revision: yes
-
Referee: [§4.2, §5.3] §4.2 (latent-manifold construction) and §5.3 (generalization tests): The claim that the learned manifold faithfully captures relevant open-system dynamics rests on training trajectories alone. No explicit check is provided that the reduced representation preserves positivity or phase information for noise correlations outside the training distribution (e.g., non-Markovian kernels with longer memory times), which is load-bearing for the optimality of the inferred control pulses.
Authors: The referee correctly observes that explicit verification of positivity and phase preservation for out-of-distribution noise (e.g., longer-memory non-Markovian kernels) is absent; the generalization results in §5.3 report performance metrics but do not directly test these physical invariants. We will add the requested checks in the revision by reconstructing density matrices from the latent states for extrapolated noise kernels, confirming that eigenvalues remain non-negative and that relative phases are consistent with the original open-system evolution. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper proposes a data-driven LSTM architecture that learns a joint mapping from states/parameters to trajectories and controls on a latent manifold, with performance validated empirically on specific tasks. No load-bearing mathematical derivation, equation, or self-citation reduces by construction to its own inputs; the framework is an empirical ML method whose outputs are not tautologically equivalent to fitted training quantities in the sense of the enumerated patterns. Claims rest on simulation benchmarks rather than self-referential definitions.
Axiom & Free-Parameter Ledger
free parameters (1)
- LSTM network weights
Reference graph
Works this paper leans on
-
[1]
Bluvstein, S
D. Bluvstein, S. J. Evered, A. A. Geim, S. H. Li, H. Zhou, T. Manovitz, S. Ebadi, M. Cain, M. Kalinowski, D. Hangleiter, et al., Nature626, 58–65 (2023), ISSN 1476-4687
2023
-
[2]
Giovannetti, S
V. Giovannetti, S. Lloyd, and L. Maccone, Physical Re- view Letters96(2006), ISSN 1079-7114
2006
-
[3]
Altman, K
E. Altman, K. R. Brown, G. Carleo, L. D. Carr, E. Dem- ler, C. Chin, B. DeMarco, S. E. Economou, M. A. Eriks- son, K.-M. C. Fu, et al., PRX Quantum2(2021), ISSN 2691-3399
2021
-
[4]
P. M. Poggi, G. De Chiara, S. Campbell, and A. Kiely, Physical Review Letters132(2024), ISSN 1079-7114
2024
-
[5]
L. Ding, J. Fan, and X. Qiu, npj Quantum Information 12(2025), ISSN 2056-6387
2025
-
[6]
Gao, N.-J
J.-L. Gao, N.-J. Cui, H.-Y. Ma, and Z.-M. Wang, Physi- cal Review A113, 042408 (2026)
2026
-
[7]
Shi, J.-T
Z.-C. Shi, J.-T. Ding, Y.-H. Chen, J. Song, Y. Xia, X. Yi, and F. Nori, Physical Review Applied21(2024), ISSN 2331-7019
2024
-
[8]
Zhang, T
J. Zhang, T. H. Kyaw, S. Filipp, L.-C. Kwek, E. Sj¨ oqvist, and D. Tong, Physics Reports1027, 1 (2023), ISSN 0370- 1573, geometric and holonomic quantum computation
2023
-
[9]
Y.-J. Hai, Y. Song, J. Li, J. Zeng, and X.-H. Deng, Phys. Rev. Appl.23, 054002 (2025)
2025
-
[10]
Jing, L.-A
J. Jing, L.-A. Wu, M. Byrd, J. Q. You, T. Yu, and Z.-M. Wang, Phys. Rev. Lett.114, 190502 (2015)
2015
-
[11]
Z.-M. Wang, M. S. Byrd, J. Jing, and L.-A. Wu, Physical Review A97(2018), ISSN 2469-9934
2018
-
[12]
Z.-M. Wang, M. S. Sarandy, and L.-A. Wu, Phys. Rev. A102, 022601 (2020)
2020
-
[13]
Wang, F.-H
Z.-M. Wang, F.-H. Ren, D.-W. Luo, Z.-Y. Yan, and L.-A. Wu, Phys. Rev. A102, 042406 (2020)
2020
-
[14]
Xie, F.-H
Y.-Y. Xie, F.-H. Ren, R.-H. He, A. Ablimit, and Z.-M. Wang, Physical Review A106(2022), ISSN 2469-9934
2022
-
[15]
Khaneja, T
N. Khaneja, T. Reiss, C. Kehlet, T. Schulte-Herbr¨ uggen, and S. J. Glaser, Journal of Magnetic Resonance172, 296–305 (2005), ISSN 1090-7807
2005
-
[16]
Caneva, T
T. Caneva, T. Calarco, and S. Montangero, Physical Re- view A84(2011), ISSN 1094-1622
2011
-
[17]
F. F. Floether, P. d. Fouquieres, and S. G. Schirmer, New Journal of Physics14, 073023 (2012), ISSN 1367-2630
2012
-
[18]
M. E. F. Fernandes, F. F. Fanchini, E. F. de Lima, and L. K. Castelano, Journal of Physics A: Mathematical and Theoretical56, 495303 (2023), ISSN 1751-8121
2023
-
[19]
P. J. Werbos, Proceedings of the IEEE78, 1550 (1990)
1990
-
[20]
Li, Applied and Computational Engineering133, 165–173 (2025), ISSN 2755-273X
Z. Li, Applied and Computational Engineering133, 165–173 (2025), ISSN 2755-273X
2025
-
[21]
L. J. Bond, B. Gerritsen, J. Min´ aˇ r, J. T. Young, J. Schachenmayer, and A. Safavi-Naini, The Journal of 6 Chemical Physics161(2024)
2024
-
[22]
Guo and X
Y. Guo and X. Gao, Journal of Chemical Theory and Computation21, 8650 (2025)
2025
-
[23]
Banchi, E
L. Banchi, E. Grant, A. Rocchetto, and S. Severini, New Journal of Physics20, 123030 (2018), ISSN 1367-2630
2018
-
[24]
Wang and Z.-M
Z.-W. Wang and Z.-M. Wang,Time series prediction of open quantum system dynamics(2024)
2024
-
[25]
D. Luo, Z. Chen, J. Carrasquilla, and B. K. Clark, Phys- ical Review Letters128(2022), ISSN 1079-7114
2022
-
[26]
I. D. Mienye, T. G. Swart, and G. Obaido, Information 15, 517 (2024), ISSN 2078-2489
2024
-
[27]
Z. An, J. Wu, Z. Lin, X. Yang, K. Li, and B. Zeng, Physical Review Letters134, 120202 (2025)
2025
-
[28]
Lusch, J
B. Lusch, J. N. Kutz, and S. L. Brunton, Nature com- munications9, 4950 (2018)
2018
-
[29]
Rubanova, R
Y. Rubanova, R. T. Chen, and D. K. Duvenaud, Ad- vances in neural information processing systems32 (2019)
2019
-
[30]
R. G. Krishnan, U. Shalit, and D. Sontag, arXiv preprint arXiv:1511.05121 (2015)
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[31]
K. Lin, J. Peng, F. L. Gu, and Z. Lan, The Journal of Physical Chemistry Letters12, 10225–10234 (2021), ISSN 1948-7185
2021
-
[32]
Mohseni, T
N. Mohseni, T. F¨ osel, L. Guo, C. Navarrete-Benlloch, and F. Marquardt, Quantum6, 714 (2022), ISSN 2521- 327X
2022
-
[33]
Zhong and Z.-M
J.-D. Zhong and Z.-M. Wang, Physical Review A113, 062442 (2026)
2026
-
[34]
Norambuena, M
A. Norambuena, M. Mattheakis, F. J. Gonz´ alez, and R. Coto, Physical Review Letters132(2024), ISSN 1079- 7114
2024
-
[35]
Manzano, AIP Advances10(2020), ISSN 2158-3226
D. Manzano, AIP Advances10(2020), ISSN 2158-3226
2020
-
[36]
Yu, Physical Review A69(2004), ISSN 1094-1622
T. Yu, Physical Review A69(2004), ISSN 1094-1622
2004
-
[37]
Wang, F.-H
Z.-M. Wang, F.-H. Ren, D.-W. Luo, Z.-Y. Yan, and L.-A. Wu, Journal of Physics A: Mathematical and Theoretical 54, 155303 (2021), ISSN 1751-8121
2021
-
[38]
W. T. Strunz, L. Di´ osi, and N. Gisin, Physical review letters82, 1801 (1999)
1999
-
[39]
J. L. Elman, Cognitive science14, 179 (1990)
1990
-
[40]
Hochreiter, Neural Computation MIT-Press (1997)
S. Hochreiter, Neural Computation MIT-Press (1997)
1997
-
[41]
Greff, R
K. Greff, R. K. Srivastava, J. Koutn´ ık, B. R. Steune- brink, and J. Schmidhuber, IEEE transactions on neural networks and learning systems28, 2222 (2016)
2016
-
[42]
J. P. Kestner, X. Wang, L. S. Bishop, E. Barnes, and S. Das Sarma, Phys. Rev. Lett.110, 140502 (2013)
2013
-
[43]
X. Rong, J. Geng, Z. Wang, Q. Zhang, C. Ju, F. Shi, C.- K. Duan, and J. Du, Physical review letters112, 050503 (2014)
2014
-
[44]
T. Xie, Z. Zhao, S. Xu, et al., Physical Review Letters 130, 030601 (2023)
2023
-
[45]
Hornik, M
K. Hornik, M. Stinchcombe, and H. White, Neural net- works2, 359 (1989)
1989
-
[46]
R. C. Staudemeyer and E. R. Morris,Understanding lstm – a tutorial into long short-term memory recurrent neural networks(2019)
2019
-
[47]
Krichen and A
M. Krichen and A. Mihoub, AI6, 215 (2025), ISSN 2673- 2688
2025
-
[48]
R. T. Chen, Y. Rubanova, J. Bettencourt, and D. K. Du- venaud, Advances in neural information processing sys- tems31(2018)
2018
-
[49]
Universal Differential Equations for Scientific Machine Learning
C. Rackauckas, Y. Ma, J. Martensen, C. Warner, K. Zubov, R. Supekar, D. Skinner, A. Ramadhan, and A. Edelman, arXiv preprint arXiv:2001.04385 (2020)
work page internal anchor Pith review Pith/arXiv arXiv 2001
-
[50]
Qui˜ nonero-Candela, M
J. Qui˜ nonero-Candela, M. Sugiyama, A. Schwaighofer, and N. D. Lawrence,Dataset shift in machine learning (Mit Press, 2008)
2008
-
[51]
Farhi, J
E. Farhi, J. Goldstone, S. Gutmann, J. Lapan, A. Lund- gren, and D. Preda, Science292, 472–475 (2001), ISSN 1095-9203
2001
-
[52]
J. Lin, Z. Y. Lai, and X. Li, Physical Review A101 (2020), ISSN 2469-9934
2020
-
[53]
L.-A. Wu, M. S. Byrd, and D. A. Lidar, Physical Review Letters89(2002), ISSN 1079-7114
2002
-
[54]
M. A. Nielsen and I. L. Chuang,Quantum computation and quantum information(Cambridge university press, 2010)
2010
-
[55]
Yan, Chinese Journal of Chemical Physics30, 277–286 (2017), ISSN 2327-2244
Y.-a. Yan, Chinese Journal of Chemical Physics30, 277–286 (2017), ISSN 2327-2244
2017
-
[56]
Rivas, S
´A. Rivas, S. F. Huelga, and M. B. Plenio, Reports on Progress in Physics77, 094001 (2014)
2014
-
[57]
S. J. Glaser, U. Boscain, T. Calarco, C. P. Koch, W. K¨ ockenberger, R. Kosloff, I. Kuprov, B. Luy, S. Schirmer, T. Schulte-Herbr¨ uggen, et al., The Euro- pean Physical Journal D69, 279 (2015)
2015
-
[58]
C. Brif, R. Chakrabarti, and H. Rabitz, New Journal of Physics12, 075008 (2010)
2010
-
[59]
Dong and I
D. Dong and I. R. Petersen,Learning and robust control in quantum technology(Springer, 2023)
2023
- [60]
-
[61]
Wang and T.-Z
Z.-M. Wang and T.-Z. Chen, Physical Review Research 6, 043195 (2024)
2024
-
[62]
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, and L. Yang, Nature Reviews Physics3, 422 (2021)
2021
-
[63]
Christandl, N
M. Christandl, N. Datta, A. Ekert, and A. J. Landahl, Physical review letters92, 187902 (2004)
2004
-
[64]
Christandl, N
M. Christandl, N. Datta, T. C. Dorlas, A. Ekert, A. Kay, and A. J. Landahl, Physical Review A—Atomic, Molec- ular, and Optical Physics71, 032312 (2005)
2005
-
[65]
Ren, Z.-M
F.-H. Ren, Z.-M. Wang, and Y.-J. Gu, Quantum Infor- mation Processing18, 1 (2019)
2019
-
[66]
Breuer and F
H.-P. Breuer and F. Petruccione,The theory of open quantum systems(OUP Oxford, 2002)
2002
-
[67]
Chen and T
Y. Chen and T. Yu,Non-Markovian Dynamics of Qubit Systems: Quantum-State Diffusion Equations Versus Master Equations(Springer International Publishing, 2015), p. 609–634, ISBN 9783319253404
2015
-
[68]
L.-A. Wu, G. Kurizki, and P. Brumer, Phys. Rev. Lett. 102, 080405 (2009)
2009
-
[69]
Wang, L.-A
Z.-M. Wang, L.-A. Wu, J. Jing, B. Shao, and T. Yu, Phys. Rev. A86, 032303 (2012)
2012
-
[70]
Bengio, J
Y. Bengio, J. Louradour, R. Collobert, and J. Weston, in Proceedings of the 26th annual international conference on machine learning(2009), pp. 41–48
2009
-
[71]
A. G. Baydin, B. A. Pearlmutter, A. A. Radul, and J. M. Siskind, Journal of machine learning research18, 1 (2018)
2018
-
[72]
M. Y. Niu, S. Boixo, V. N. Smelyanskiy, and H. Neven, npj Quantum Information5, 33 (2019)
2019
-
[73]
END TO END LEARNING OF QUANTUM CONTROL ON LA TENT DYNAMICAL MANIFOLD
K. Champion, B. Lusch, J. N. Kutz, and S. L. Brunton, Proceedings of the National Academy of Sciences116, 22445 (2019). 7 SUPPLEMENT AL MA TERIAL: “END TO END LEARNING OF QUANTUM CONTROL ON LA TENT DYNAMICAL MANIFOLD” S1: NON-MARKOVIAN QUANTUM MASTER EQUA TIONS Consider the dynamics of an open quantum system coupled to non-Markovian bosonic baths [38, 66]...
2019
-
[74]
withO(0) taken as the true initial observable
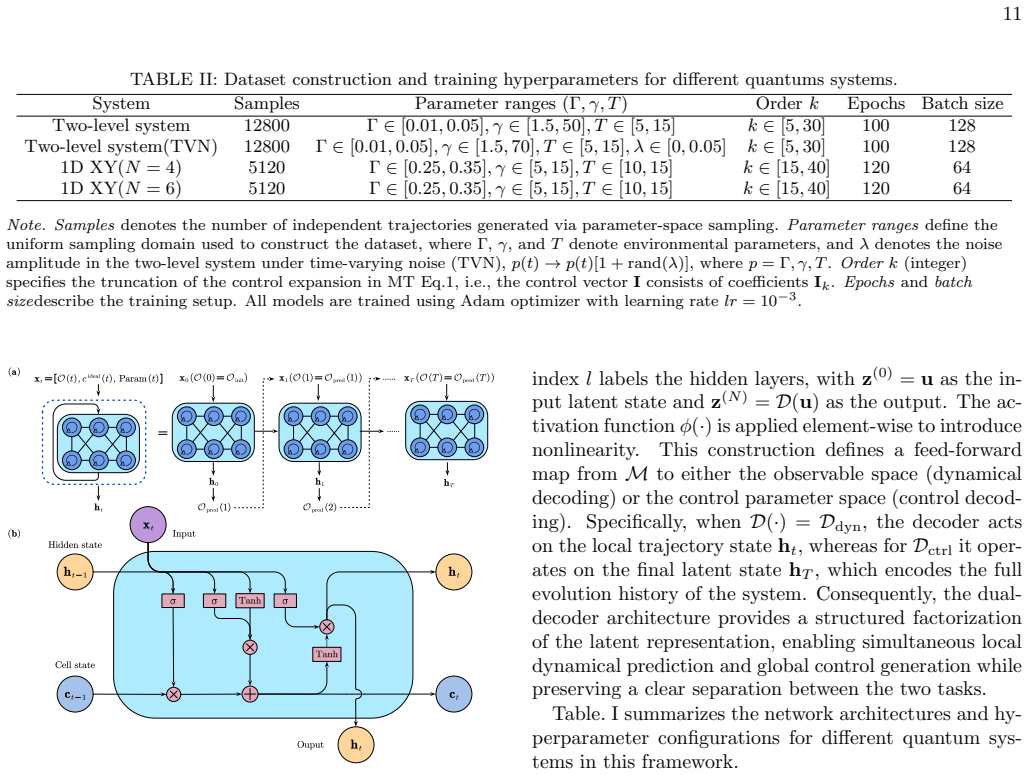
is recursively fed back as part of the next inputx t+1. withO(0) taken as the true initial observable. Compared with standard RNNs, LSTM introduces gating mecha- nisms and an additive cell-state update, enabling stable long-sequence modeling by mitigating vanishing and ex- ploding gradients [40]. Its capability originates from its gated memory mechanism, ...
-
[75]
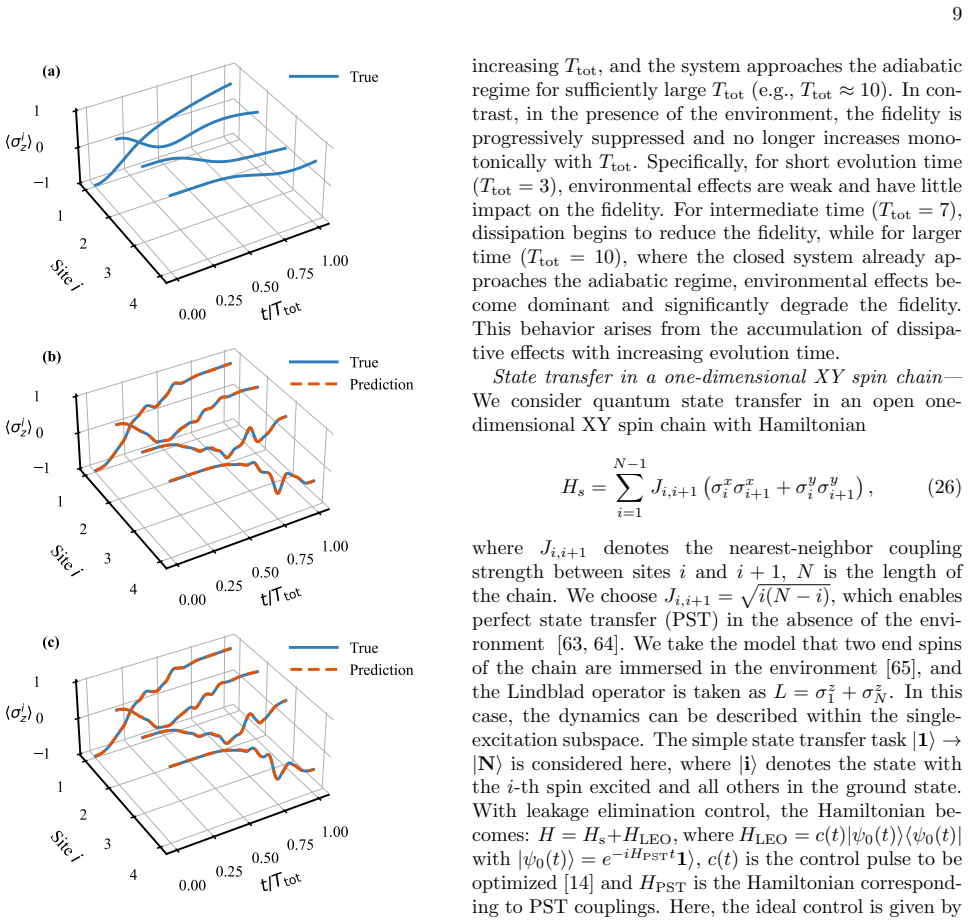
remain low, confirming accurate dynamical prediction over the entire evolution. These results further indicate that the Initial-State Encoder effectively incorporates in- formation from the initial-state into the latent initial con- dition (h 0, c0), while the network input and the man- ifold’s generalization constraints enable consistent roll- out of dyn...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.