Continuous-Time Probabilistic Correctors for Uncertainty-Aware Physics-Based Spacecraft Trajectory Forecasting
Pith reviewed 2026-06-26 15:02 UTC · model grok-4.3
The pith
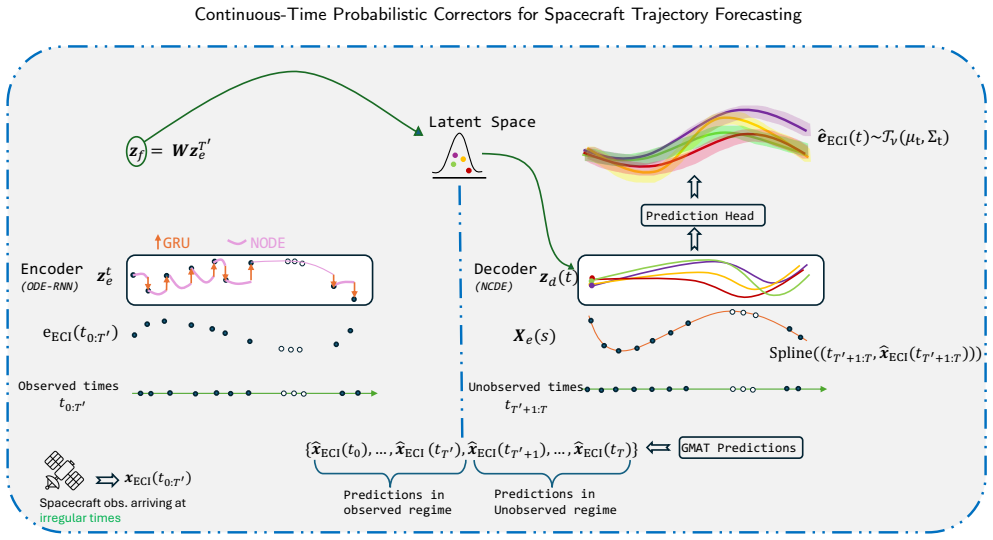
A continuous-time probabilistic corrector based on Latent NCDEs augments physics-based propagators to improve accuracy and uncertainty calibration for spacecraft trajectories over 2-4 day forecasts without observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
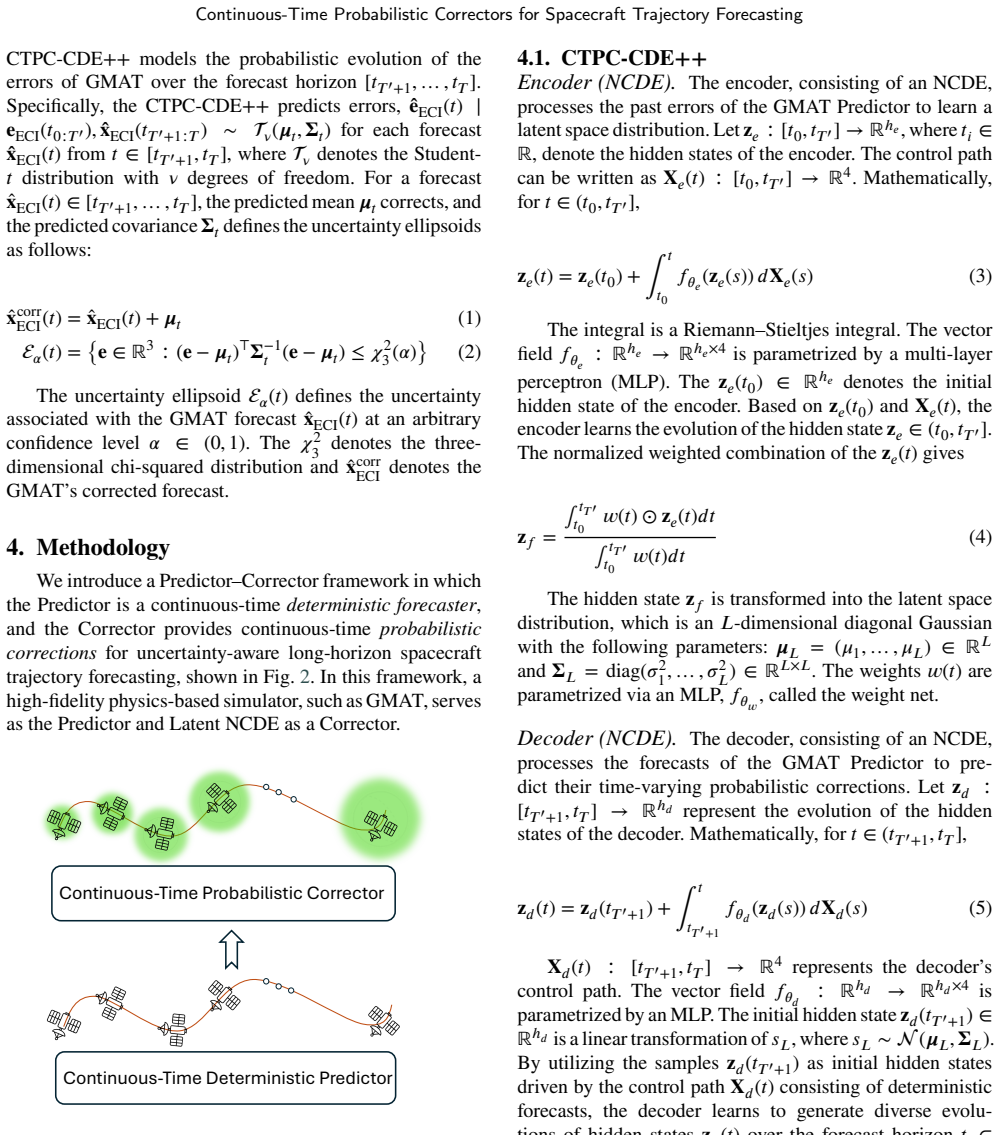
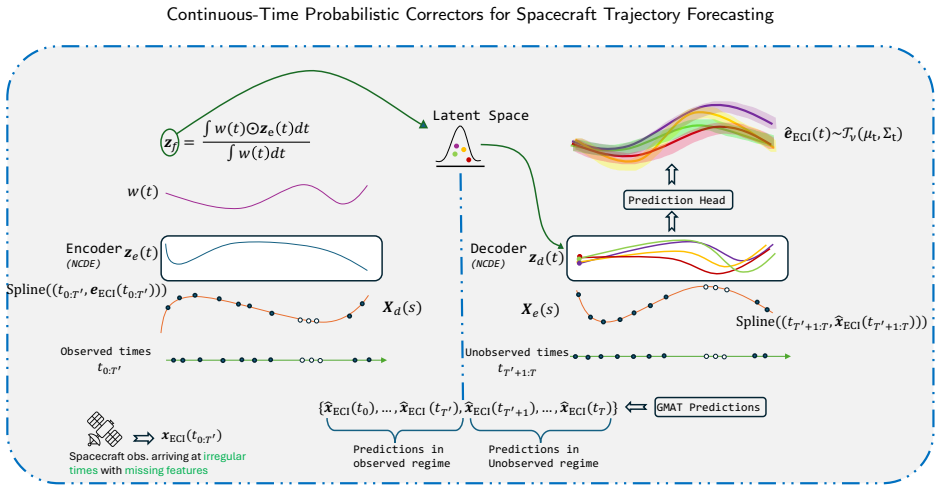
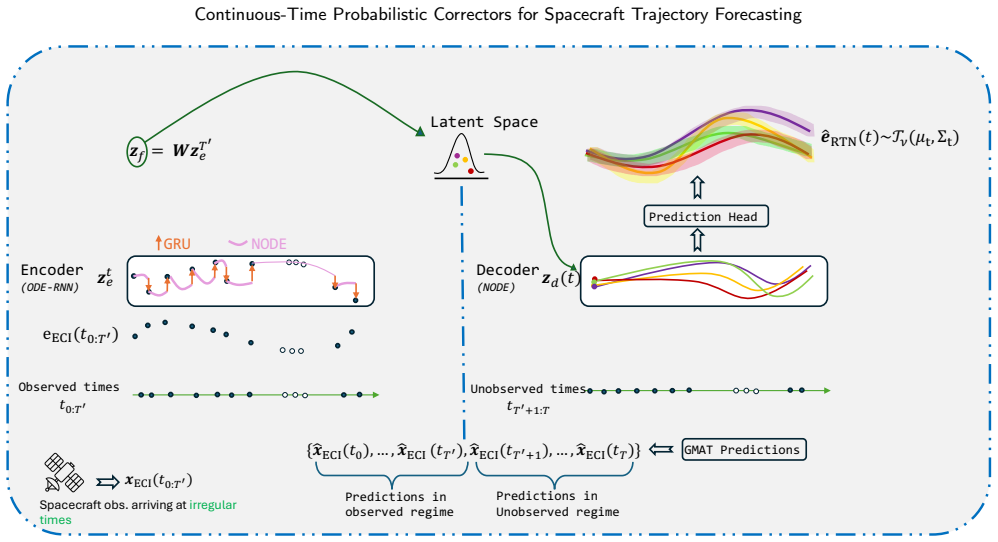
The central claim is that a Predictor-Corrector architecture, with the corrector implemented as a Latent Neural Controlled Differential Equation that models the probabilistic temporal evolution of forecast errors, produces sharper and better-calibrated uncertainty estimates while also reducing point-forecast error relative to both the bare deterministic propagator and to Latent ODE correctors.
What carries the argument
The Predictor-Corrector framework in which a physics-based deterministic forecaster is wrapped by a Latent NCDE probabilistic Corrector that models the continuous-time dynamics of forecast errors.
If this is right
- The corrector can be added to any existing deterministic orbit propagator without altering its internal equations.
- Continuous-time modeling naturally accommodates irregular observation times and missing data features.
- A calibration-and-sharpness loss enables reliable uncertainty propagation over multi-day horizons.
- Performance gains hold across multiple rolling test windows on real-world CDDIS data using the GMAT propagator.
Where Pith is reading between the lines
- The same error-modeling idea could be tested on other physics simulators that accumulate drift, such as long-term climate or orbital debris models.
- If the single trained corrector generalizes, it could support autonomous forecasting pipelines that run for weeks between ground updates.
- When occasional new observations arrive, the framework could be extended to reset or condition the error state rather than restarting the propagator.
Load-bearing premise
Forecast errors generated by the deterministic physics propagator follow dynamics that can be captured by one Latent NCDE model trained on historical data and that will generalize to future unseen long-horizon periods without retraining.
What would settle it
A new test set of spacecraft trajectories over 2-4 day horizons where the wrapped corrector produces no gain in point accuracy or where the uncertainty estimates become less calibrated than the deterministic baseline would falsify the central claim.
Figures
read the original abstract
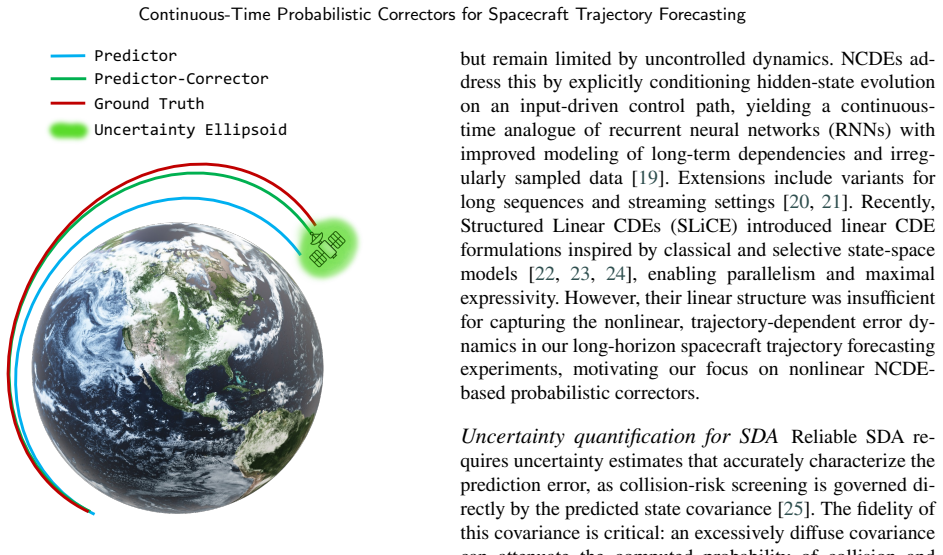
Long-horizon spacecraft trajectory forecasting suffers from error accumulation due to the absence of corrective observations in the forecast regime, making reliable uncertainty estimation crucial for safety-critical decision-making such as space domain awareness and conjunction assessment. While high-fidelity physics-based orbit propagators provide accurate deterministic forecasts, they typically lack calibrated uncertainty estimates over long horizons. We introduce a Predictor--Corrector framework in which a physics-based continuous-time $\textit{deterministic}$ forecaster is augmented with a learned continuous-time $\textit{probabilistic}$ Corrector that models forecast errors. The proposed Corrector can be wrapped around an existing deterministic propagator to improve forecast accuracy while producing sharp and calibrated full-covariance uncertainty estimates. The Corrector is based on Latent Neural Controlled Differential Equations (Latent NCDEs) and models the probabilistic temporal evolution of forecast errors in continuous time, naturally supporting irregular sampling and missing features. We further introduce a loss function that promotes calibration and sharpness in long-horizon uncertainty propagation. We evaluate the proposed framework on long-horizon spacecraft trajectory forecasting using real-world data from NASA's Crustal Dynamics Data Information System (CDDIS), wrapping the Corrector around NASA's General Mission Analysis Tool (GMAT). Across forecast horizons of 2--4 days without observations and six rolling test windows, the proposed approach consistently improves accuracy and uncertainty calibration compared to deterministic baselines and Latent ODE-based correctors, demonstrating the effectiveness of the continuous-time probabilistic Corrector for trajectory forecasting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a Predictor-Corrector framework that augments a deterministic physics-based propagator (GMAT) with a Latent NCDE probabilistic corrector to model continuous-time forecast errors. It reports consistent gains in accuracy and uncertainty calibration over 2-4 day horizons without observations, across six rolling test windows on real CDDIS data, outperforming deterministic baselines and Latent ODE correctors.
Significance. If the empirical results hold under a more rigorous generalization test, the modular continuous-time corrector would provide a practical route to calibrated uncertainty estimates for existing high-fidelity propagators, which is relevant for conjunction assessment and space domain awareness. The use of Latent NCDEs for irregular sampling and the calibration-promoting loss are technically appropriate choices for the problem.
major comments (1)
- [Evaluation protocol (abstract and §5)] The headline generalization claim (consistent gains across six rolling windows with a single trained Latent NCDE) rests on the untested assumption that forecast-error dynamics remain stationary. The evaluation description provides no information on the temporal separation between the training period and the six test windows, nor any ablation that retrains the corrector on data local to each window; without these, it is impossible to rule out that the reported improvements exploit short-term stationarity rather than true forward generalization.
minor comments (1)
- [Methods] The loss function that promotes calibration and sharpness is introduced but its precise form (e.g., any weighting between NLL and sharpness terms) is not shown in the provided abstract; including the explicit expression would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the evaluation protocol. We address the single major comment below and will revise the manuscript accordingly to strengthen the presentation of our results.
read point-by-point responses
-
Referee: [Evaluation protocol (abstract and §5)] The headline generalization claim (consistent gains across six rolling windows with a single trained Latent NCDE) rests on the untested assumption that forecast-error dynamics remain stationary. The evaluation description provides no information on the temporal separation between the training period and the six test windows, nor any ablation that retrains the corrector on data local to each window; without these, it is impossible to rule out that the reported improvements exploit short-term stationarity rather than true forward generalization.
Authors: We agree that the manuscript would benefit from explicit details on the temporal structure of the data splits. In the revised §5 we will add a clear description of the training period and the six rolling test windows, including their start/end dates and the gaps between training and each test window to confirm forward generalization. The rolling windows are constructed over an extended multi-year CDDIS record with the model trained once on earlier data and evaluated on later non-overlapping periods; the consistent gains across these windows support that the Latent NCDE captures generalizable error dynamics. We acknowledge that a local-retraining ablation would provide additional evidence and will include a brief discussion of this point (and, space permitting, a limited ablation) in the revision. The current protocol matches the practical use case of training once on historical data for ongoing forecasts. revision: yes
Circularity Check
No circularity; empirical evaluation on held-out rolling windows is self-contained
full rationale
The paper introduces a Predictor-Corrector framework augmenting GMAT with a Latent NCDE-based probabilistic corrector for forecast errors, trained on historical CDDIS data and evaluated on six rolling test windows for 2-4 day horizons. All load-bearing claims (accuracy and calibration gains) are presented as direct empirical outcomes on held-out data rather than quantities defined in terms of fitted parameters or prior self-citations. No self-definitional equations, fitted-input predictions, uniqueness theorems from the same authors, or ansatz smuggling appear in the abstract or evaluation description; the loss function and model architecture are introduced as novel contributions without reduction to inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- Latent NCDE neural network weights
axioms (1)
- standard math Existence and uniqueness of solutions for controlled differential equations under Lipschitz conditions
invented entities (1)
-
Latent NCDE probabilistic corrector
no independent evidence
Reference graph
Works this paper leans on
-
[1]
National Aeronautics and Space Administration, NASA Spacecraft Conjunction Assessment and Collision Avoidance Best Practices Handbook,TechnicalReportNASA/SP-20230002470,Rev.1,NASA Office of the Chief Engineer, 2023
2023
-
[2]
Aida, Conjunction risk assessment and avoidance maneuver plan- ningtools,6thInternationalConferenceonAstrodynamicsToolsand Techniques (ICATT), Darmstadt, Germany, 2016
S. Aida, Conjunction risk assessment and avoidance maneuver plan- ningtools,6thInternationalConferenceonAstrodynamicsToolsand Techniques (ICATT), Darmstadt, Germany, 2016
2016
-
[3]
E. Kerr, N. S. Ortiz, State of the art and future needs in conjunction analysis methods, processes and software, in: Proceedings of 8th EuropeanConferenceonSpaceDebris(virtualedition,SDC8),2021, pp. 20–23
2021
-
[4]
Hill, Conjunction assessment research and applications, AIAA/AAS Astrodynamics Specialist Conference, 2012
K. Hill, Conjunction assessment research and applications, AIAA/AAS Astrodynamics Specialist Conference, 2012. AIAA Paper 2012-4805
2012
-
[5]
S.P.Hughes,Generalmissionanalysistool(gmat),TechnicalReport, NASA Goddard Space Flight Center, 2016
2016
-
[6]
L. A. Zhang, K. Langeland, J. Tran, J. Logue, P. Puri, G. Nacouzi, A.Jacques,G.J.Briggs,ArtificialIntelligenceandMachineLearning for Space Domain Awareness: Characterizing the Impact on Mission Effectiveness, RAND Corporation, Santa Monica, CA, 2024. doi:10. 7249/RRA2318-1
2024
-
[7]
H. Chen, Q. Zhang, Y. Birkelund, Machine learning forecasts of scandinaviannumericalweatherpredictionwindmodelresidualswith control theory for wind energy, Energy Reports 8 (2022) 661–668
2022
-
[8]
L. J. Slater, L. Arnal, M.-A. Boucher, A. Y.-Y. Chang, S. Moulds, C.Murphy,G.Nearing,G.Shalev,C.Shen,L.Speight,etal., Hybrid forecasting: blending climate predictions with ai models, Hydrology and earth system sciences 27 (2023) 1865–1889
2023
-
[9]
H. Liu, X. Meng, Explainable ensemble learning model for residual strength forecasting of defective pipelines, Applied Sciences 15 (2025) 4031
2025
-
[10]
Zhang, G
R. Zhang, G. Li, S. Bu, G. Kuang, W. He, Y. Zhu, S. Aziz, A hybrid deep learning model with error correction for photovoltaic power forecasting, Frontiers in Energy Research 10 (2022) 948308
2022
-
[11]
G. P. Zhang, Time series forecasting using a hybrid arima and neural network model, Neurocomputing 50 (2003) 159–175
2003
-
[12]
D. Xu, Q. Zhang, Y. Ding, D. Zhang, Application of a hybrid arima- lstm model based on the spei for drought forecasting, Environmental Science and Pollution Research 29 (2022) 4128–4144
2022
-
[13]
M. B. Shahid, C. Fleming, Hopcast: Calibration of autoregressive dynamics models, Transactions on Machine Learning Research (2025)
2025
-
[14]
M. B. Shahid, P. Koirla, C. Fleming, Neural cdes as correctors for learnedtimeseriesmodels,2025.URL:https://arxiv.org/abs/2512. 12116.arXiv:2512.12116
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[15]
R. T. Q. Chen, Y. Rubanova, J. Bettencourt, D. Duvenaud, Neural ordinary differential equations, 2019. URL:https://arxiv.org/abs/ 1806.07366.arXiv:1806.07366
work page internal anchor Pith review Pith/arXiv arXiv 2019
- [16]
-
[17]
Latent ODEs for Irregularly-Sampled Time Series
Y.Rubanova,R.T.Q.Chen,D.Duvenaud,Latentodesforirregularly- sampled time series, 2019. URL:https://arxiv.org/abs/1907.03907. arXiv:1907.03907
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[18]
M. Lechner, R. Hasani, Learning long-term dependencies in irregularly-sampled time series, 2020. URL:https://arxiv.org/abs/ 2006.04418.arXiv:2006.04418
-
[19]
URL:https://arxiv.org/ abs/2005.08926.arXiv:2005.08926
P.Kidger,J.Morrill,J.Foster,T.Lyons,Neuralcontrolleddifferential equations for irregular time series, 2020. URL:https://arxiv.org/ abs/2005.08926.arXiv:2005.08926
-
[20]
J. Morrill, C. Salvi, P. Kidger, J. Foster, T. Lyons, Neural rough differentialequationsforlongtimeseries,2021.URL:https://arxiv. org/abs/2009.08295.arXiv:2009.08295. M. B. Shahid et al.:Preprint submitted to ElsevierPage 17 of 18 Continuous-Time Probabilistic Correctors for Spacecraft Trajectory Forecasting
-
[21]
J. Morrill, P. Kidger, L. Yang, T. Lyons, Neural controlled dif- ferential equations for online prediction tasks, arXiv preprint arXiv:2106.11028 (2021)
-
[22]
B.Walker,L.Yang,N.M.Cirone,C.Salvi,T.Lyons,Structuredlinear cdes: Maximally expressive and parallel-in-time sequence models,
- [23]
-
[24]
Mamba: Linear-Time Sequence Modeling with Selective State Spaces
A.Gu,T.Dao,Mamba:Linear-timesequencemodelingwithselective statespaces,FirstConferenceonLanguageModeling(COLM),2024. ArXiv:2312.00752
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[25]
Muca Cirone, A
N. Muca Cirone, A. Orvieto, B. Walker, C. Salvi, T. Lyons, Theo- reticalfoundationsofdeepselectivestate-spacemodels, Advancesin Neural Information Processing Systems 37 (2024) 127226–127272
2024
-
[26]
L. K. Newman, A. K. Mashiku, M. D. Hejduk, M. R. Johnson, J. D. Rosa, NASA conjunction assessment risk analysis updated re- quirements architecture, AAS/AIAA Astrodynamics Specialist Con- ference, 2019. AAS 19-668
2019
-
[27]
dilution region
M. D. Hejduk, D. E. Snow, L. K. Newman, Satellite conjunction assessment risk analysis for “dilution region” events: Issues and op- erational approaches, Space Traffic Management Conference, 2019
2019
-
[28]
Mashiku, J
A. Mashiku, J. Garrison, J. R. Carpenter, Statistical orbit determina- tionusingtheparticlefilterforincorporatingnon-gaussianuncertain- ties., in: AIAA/AAS Astrodynamics Specialist Conference, 2012, p. 5063
2012
-
[29]
Gneiting, A
T. Gneiting, A. E. Raftery, Strictly proper scoring rules, prediction, and estimation, Journal of the American statistical Association 102 (2007) 359–378
2007
-
[30]
J. Tran, P. Puri, J. Logue, A. Jacques, L. A. Zhang, K. Langeland, G.Nacouzi,G.J.Briggs,ArtificialIntelligenceandMachineLearning for Space Domain Awareness: The Development of Two Artificial Intelligence Case Studies, RAND Corporation, Santa Monica, CA,
-
[31]
doi:10.7249/RRA2318-2
-
[32]
Murphy,Probabilistic machinelearning: Advancedtopics, MIT press, 2023
K.P. Murphy,Probabilistic machinelearning: Advancedtopics, MIT press, 2023
2023
-
[33]
C. Dugas,Y. Bengio, F.Bélisle, C.Nadeau, R. Garcia, Incorporating second-order functional knowledge for better option pricing, in: Ad- vancesinNeuralInformationProcessingSystems(NIPS),volume13, 2001, pp. 472–478
2001
-
[34]
D. P. Kingma, M. Welling, Auto-encoding variational bayes, arXiv preprint arXiv:1312.6114 (2013)
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[35]
URL:https://arxiv.org/abs/ 2002.08791.arXiv:2002.08791
A.G.Wilson,P.Izmailov,Bayesiandeeplearningandaprobabilistic perspective of generalization, 2022. URL:https://arxiv.org/abs/ 2002.08791.arXiv:2002.08791
-
[36]
Simple and Scalable Predictive Uncertainty Estimation using Deep Ensembles
B. Lakshminarayanan, A. Pritzel, C. Blundell, Simple and scalable predictive uncertainty estimation using deep ensembles, 2017. URL: https://arxiv.org/abs/1612.01474.arXiv:1612.01474
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[37]
C. E. Noll, M. Dube, The doris data center at the cddis, DORIS Days 2000Symposium,Toulouse,France,2000.URL:https://ids-doris. org/documents/report/doris_days_2000/noll.pdf
2000
-
[38]
Bradbury, R
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman- Milne, Q. Zhang, JAX: composable transformations of Python+NumPy programs, Software, version 0.3.13, 2018. URL: http://github.com/jax-ml/jax
2018
-
[39]
On neural differential equations
P. Kidger, On neural differential equations, 2022. URL:https:// arxiv.org/abs/2202.02435.arXiv:2202.02435
-
[40]
URL:https:// doi.org/10.5281/zenodo.20741146
M.B.Shahid,Z.Jiang,S.Sarkar,C.Fleming,Continuous-timeprob- abilistic correctors for uncertainty-aware physics-based spacecraft trajectory forecasting (code/dataset), Zenodo, 2026. URL:https:// doi.org/10.5281/zenodo.20741146. doi:10.5281/zenodo.20741146. M. B. Shahid et al.:Preprint submitted to ElsevierPage 18 of 18
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.