Learned Response-Field Inertia Operator for HEC-RAS 2D Water-Surface Elevation Prediction
Pith reviewed 2026-06-28 02:45 UTC · model grok-4.3
The pith
A learned inertia operator on native HEC-RAS cells delivers solver-consistent water-surface elevation rollouts while retaining added complexity only when validation requires it.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
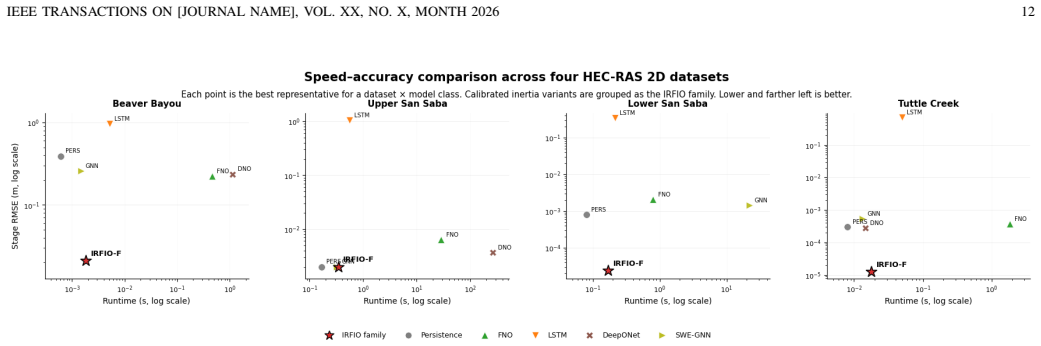
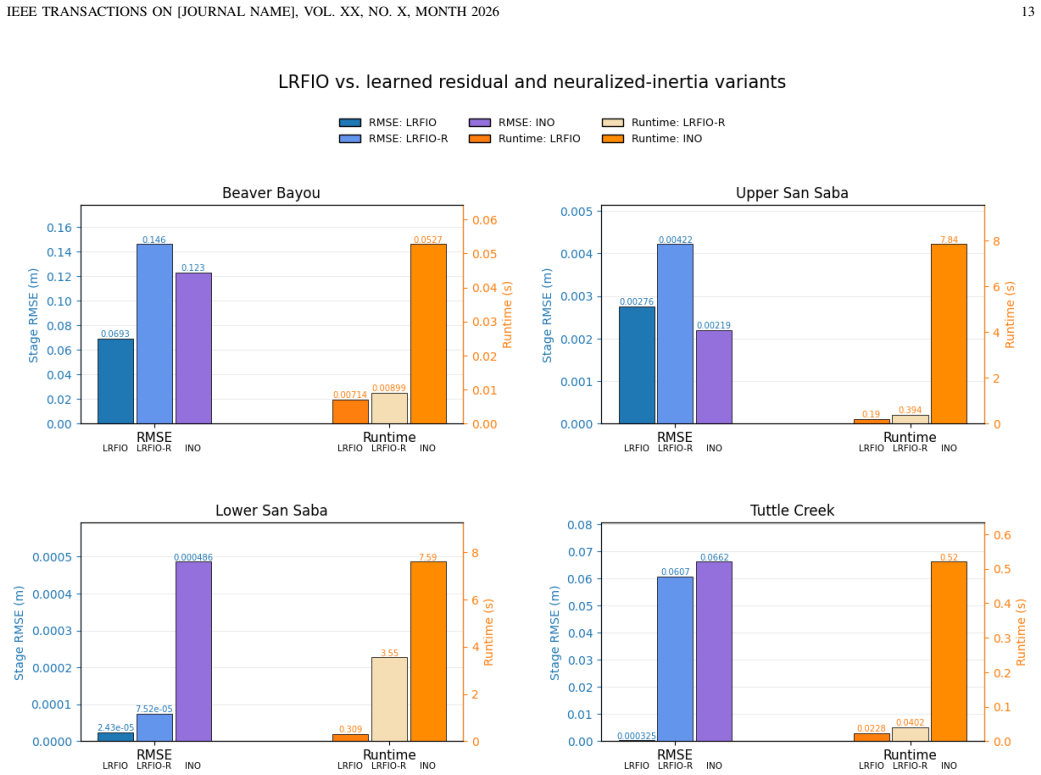
The central claim is that the Learned Response-Field Inertia Operator (LRFIO) calibrates an inertial response operator from HEC-RAS trajectories and deploys the retained operator through closed-form native-cell rollout. LRFIO evaluates a base-case-first hierarchy of persistence, global calibrated inertia, and segmented response-field inertia, treating segmentation, residual correction, and neuralized inertia as optional modeling choices retained only when validation evidence justifies their cost. Across four diverse HEC-RAS 2D benchmarks the method adapts its retained structure per domain, produces a maximum validation regret of 4.30 percent, and achieves rollout times between 0.003 s and 0.
What carries the argument
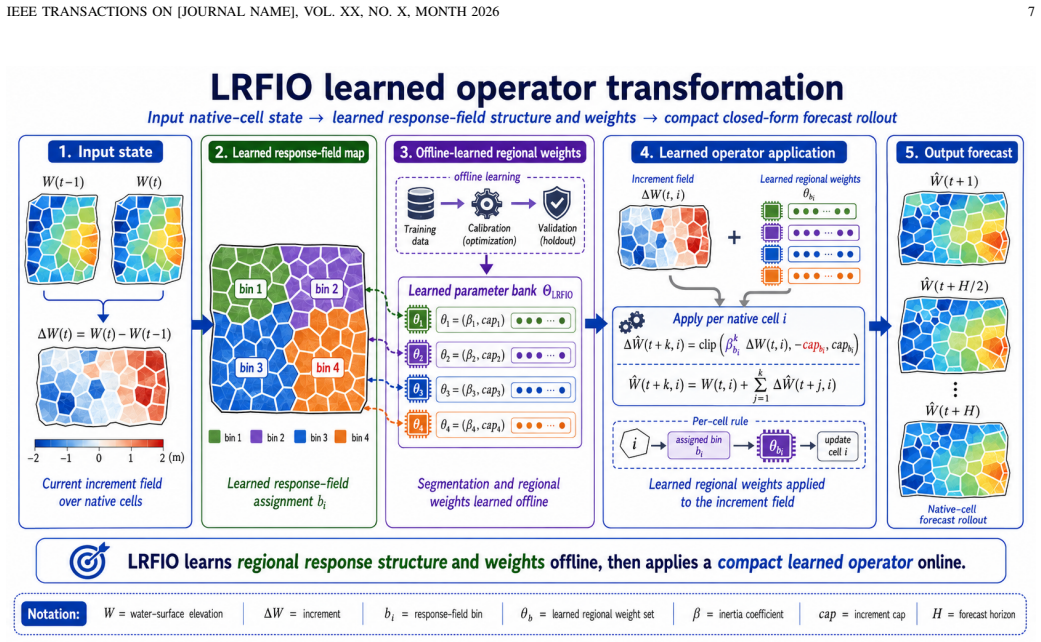
The Learned Response-Field Inertia Operator (LRFIO), a no-forcing increment-based surrogate that builds and deploys a response hierarchy from persistence through global calibrated inertia to segmented response-field inertia on native computational cells.
If this is right
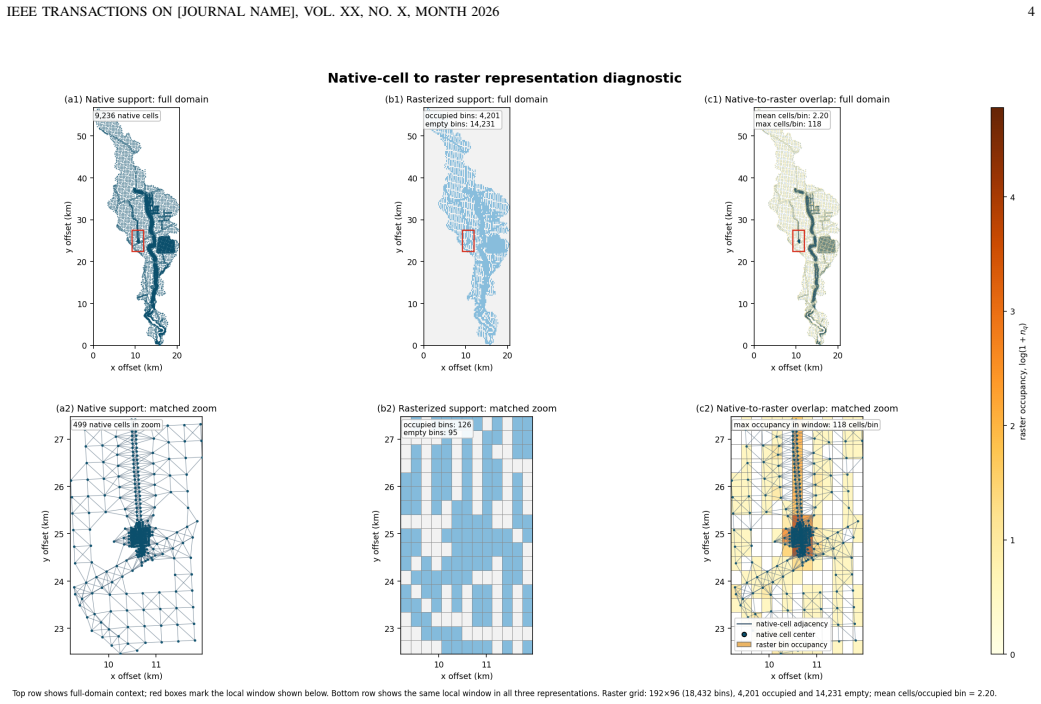
- The native-cell increment provides a strong solver-conditioned predictive scaffold without raster remapping or information-access confounding.
- Different hydraulic domains may retain different levels of response segmentation or residual correction while keeping overall validation regret low.
- Closed-form rollout times drop to milliseconds on retained operators, enabling horizon-normalized speedups on the order of 10 to the 4 relative to full HEC-RAS solves.
- Added response-field, neural, or spatial complexity should be introduced only when empirical validation on the target domain shows measurable improvement.
Where Pith is reading between the lines
- The same increment-scaffold logic could be tested on other time-stepping physics solvers to see whether inertia operators generalize beyond hydraulics.
- Real-time forecasting systems could incorporate LRFIO rollouts for rapid scenario exploration while falling back to the full solver only when the selector audit flags high regret.
- If the weakest assumption fails on unseen projects, the method would require either domain-adaptive recalibration or explicit physics constraints to remain accurate.
Load-bearing premise
An inertia operator calibrated on solved trajectories from the training domains will produce accurate closed-form rollouts on new hydraulic states or different projects without retraining.
What would settle it
A new HEC-RAS 2D project or hydraulic state on which the selected LRFIO rollout deviates from the full solver output by more than the reported validation error even after choosing the best response structure from the hierarchy.
Figures
read the original abstract
This article presents a cross-dataset evaluation of learned native-cell surrogate models for solver-consistent water-surface elevation (WSE) prediction in HEC-RAS 2D. To avoid raster remapping error and information-access confounding, surrogates are evaluated directly on the original nonuniform computational cells under an explicit policy that separates static project inputs, current hydraulic state, project-input forcing, calibration-derived quantities, and future solver-output targets. We introduce the Learned Response-Field Inertia Operator (LRFIO), a no-forcing, increment-based learned surrogate that calibrates an inertial response operator from solved HEC-RAS trajectories and deploys the retained operator through closed-form native-cell rollout. LRFIO evaluates a base-case-first response hierarchy consisting of persistence, global calibrated inertia, and segmented response-field inertia. Segmentation, residual correction, and neuralized inertia are treated as learnable modeling choices, with added complexity retained only when validation evidence justifies its cost. Evaluated across four diverse HEC-RAS 2D benchmarks, LRFIO retains different response structures for different domains, demonstrating adaptive learned complexity. The selector audit shows controlled complexity with a maximum validation regret of 4.30%. During deployment, retained rollout times range from 0.003 s to 0.242 s, and the Beaver Bayou measured-solve comparison gives an estimated 2.75 x 10^4 horizon-normalized speedup over HEC-RAS. These results indicate that the current native-cell increment is a strong solver-conditioned predictive scaffold and that added response-field, neural, or spatial complexity should be retained only when empirically justified.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the Learned Response-Field Inertia Operator (LRFIO), a no-forcing increment-based surrogate for HEC-RAS 2D water-surface elevation prediction. It calibrates an inertial response operator from solved trajectories, deploys it via closed-form native-cell rollout, and evaluates a hierarchy (persistence, global inertia, segmented response-field inertia) with optional segmentation, residual correction, and neuralization across four benchmarks. The work reports domain-adaptive structure selection, maximum validation regret of 4.30%, rollout times of 0.003–0.242 s, and an estimated 2.75×10^4 horizon-normalized speedup on Beaver Bayou, concluding that the native-cell increment is a strong scaffold and that added complexity should be retained only when validation evidence justifies it.
Significance. If the generalization claims hold, the results would support a parsimony principle in surrogate modeling for hydraulic solvers: simple calibrated inertia operators can deliver solver-consistent predictions at high speed, reducing the default use of neural or spatially complex models. The explicit separation of static inputs, state, forcing, and targets, together with the reported adaptive selection and speedup, would be a concrete contribution to the literature on learned surrogates for physics-based hydraulic codes.
major comments (3)
- [cross-dataset evaluation] Cross-dataset evaluation (abstract and evaluation section): the reported maximum validation regret of 4.30% and domain-adaptive structure selection rest on four benchmarks, yet no quantitative metrics of distribution shift (differences in geometry, boundary conditions, flow regime, or project scale) between training and test domains are supplied. This is load-bearing for the central recommendation that added response-field or neural complexity should be retained only when empirically justified.
- [LRFIO methods and deployment] LRFIO calibration and rollout (methods and deployment sections): the inertia operator is calibrated directly from solved HEC-RAS trajectories and then rolled out in closed form; the manuscript must demonstrate that the resulting predictions constitute extrapolation to new hydraulic states rather than replay of quantities derived from the same solver outputs, as this directly affects the claim that LRFIO can serve as a replacement surrogate.
- [results and Beaver Bayou comparison] Rollout analysis (results section): while rollout times and a horizon-normalized speedup are given, no analysis of error accumulation, stability over long horizons, or sensitivity to initial-condition perturbations is reported; this is required to substantiate that the native-cell increment remains a reliable scaffold under the closed-form rollout policy.
minor comments (2)
- [abstract and methods] The abstract refers to 'segmented response-field inertia' and 'residual correction' without defining the segmentation criterion or residual formulation; a brief equation or pseudocode in the methods would improve clarity.
- [benchmark description] Table or figure captions for the four benchmarks should explicitly list the key hydraulic characteristics (e.g., domain size, boundary types) to allow readers to assess diversity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We respond point-by-point to the major comments below.
read point-by-point responses
-
Referee: [cross-dataset evaluation] Cross-dataset evaluation (abstract and evaluation section): the reported maximum validation regret of 4.30% and domain-adaptive structure selection rest on four benchmarks, yet no quantitative metrics of distribution shift (differences in geometry, boundary conditions, flow regime, or project scale) between training and test domains are supplied. This is load-bearing for the central recommendation that added response-field or neural complexity should be retained only when empirically justified.
Authors: We agree that quantitative metrics of distribution shift would strengthen support for the generalization claims and the adaptive selection recommendation. In revision we will add explicit measures (e.g., differences in mesh resolution, boundary-condition statistics, flow-regime indicators, and project scale) comparing the four benchmarks. revision: yes
-
Referee: [LRFIO methods and deployment] LRFIO calibration and rollout (methods and deployment sections): the inertia operator is calibrated directly from solved HEC-RAS trajectories and then rolled out in closed form; the manuscript must demonstrate that the resulting predictions constitute extrapolation to new hydraulic states rather than replay of quantities derived from the same solver outputs, as this directly affects the claim that LRFIO can serve as a replacement surrogate.
Authors: Calibration uses trajectories from the training domains only. Rollout applies the fixed operator to new states generated during prediction on held-out test domains whose hydraulic conditions differ from the calibration set. We will revise the methods section to include an explicit statement and illustrative example confirming that rollout states lie outside the calibration trajectories. revision: yes
-
Referee: [results and Beaver Bayou comparison] Rollout analysis (results section): while rollout times and a horizon-normalized speedup are given, no analysis of error accumulation, stability over long horizons, or sensitivity to initial-condition perturbations is reported; this is required to substantiate that the native-cell increment remains a reliable scaffold under the closed-form rollout policy.
Authors: We acknowledge that explicit analysis of error accumulation, long-horizon stability, and initial-condition sensitivity would further substantiate the rollout claims. We will add these analyses (error-growth curves and perturbation tests) to the results section in revision. revision: yes
Circularity Check
No significant circularity; standard learned surrogate with independent validation
full rationale
The paper introduces LRFIO as a learned surrogate that calibrates an inertia operator on solved HEC-RAS trajectories and performs closed-form rollout, then evaluates structure selection via validation regret across four benchmarks. This follows the standard supervised learning pattern of fitting on training data and assessing on held-out or cross-dataset validation data, with the central claim (native-cell increments as strong scaffold, retain complexity only when justified) resting on the empirical 4.30% max regret metric rather than any definitional equivalence or self-referential reduction. No self-citation load-bearing steps, no fitted inputs renamed as predictions by construction, and no uniqueness theorems or ansatzes are invoked. The derivation chain is self-contained against external solver benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- inertia coefficients
axioms (1)
- domain assumption Native-cell increments from the solver contain sufficient information to support closed-form rollout without additional forcing terms.
Reference graph
Works this paper leans on
-
[1]
Army Corps of Engineers, Hydrologic Engineering Center, HEC-RAS River Analysis System 2D User’s Manual, U.S
U.S. Army Corps of Engineers, Hydrologic Engineering Center, HEC-RAS River Analysis System 2D User’s Manual, U.S. Army Corps of Engineers, Davis, CA, USA, accessed: May 8, 2026. [Online]. Available: https://www.hec.usace.army.mil/software/hec-ras/documenta tion/HEC-RAS 2D Users Manual.pdf
2026
-
[2]
Army Corps of Engineers, accessed: May 8, 2026
——,HEC-RAS Hydraulic Reference Manual: 2D Unsteady Flow Hydrodynamics—Numerical Methods, U.S. Army Corps of Engineers, accessed: May 8, 2026. [Online]. Available: https://www.hec.usace.ar my.mil/confluence/rasdocs/ras1dtechref/6.4/theoretical-basis-for-one-d imensional-and-two-dimensional-hydrodynamic-calculations/2d-unste ady-flow-hydrodynamics/numerical-methods
2026
-
[3]
Review of surrogate modeling in water resources,
S. Razavi, B. A. Tolson, and D. H. Burn, “Review of surrogate modeling in water resources,”Water Resources Research, vol. 48, no. 7, p. W07401, 2012
2012
-
[4]
Fourier Neural Operator for Parametric Partial Differential Equations,
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, and A. Anandkumar, “Fourier Neural Operator for Parametric Partial Differential Equations,” inInternational Conference on Learning Representations, 2021. [Online]. Available: https: //openreview.net/forum?id=c8P9NQVtmnO
2021
-
[5]
Learning Non- linear Operators via DeepONet Based on the Universal Approximation Theorem of Operators,
L. Lu, P. Jin, G. Pang, Z. Zhang, and G. E. Karniadakis, “Learning Non- linear Operators via DeepONet Based on the Universal Approximation Theorem of Operators,”Nature Machine Intelligence, vol. 3, no. 3, pp. 218–229, 2021
2021
-
[6]
Rapid Spatio-Temporal Flood Modelling via Hydraulics-Based Graph Neural Networks,
R. Bentivoglio, E. Isufi, S. N. Jonkman, and R. Taormina, “Rapid Spatio-Temporal Flood Modelling via Hydraulics-Based Graph Neural Networks,”Hydrology and Earth System Sciences, vol. 27, no. 23, pp. 4227–4246, 2023. [Online]. Available: https://hess.copernicus.org/articl es/27/4227/2023/
2023
-
[7]
Multi-Scale Hydraulic Graph Neural Networks for Flood Modelling,
R. Bentivoglioet al., “Multi-Scale Hydraulic Graph Neural Networks for Flood Modelling,”Natural Hazards and Earth System Sciences, vol. 25, pp. 335–356, 2025
2025
-
[8]
Army Corps of Engineers, Hydrologic Engineering Center, HEC-RAS User’s Manual: Boundary Conditions, U.S
U.S. Army Corps of Engineers, Hydrologic Engineering Center, HEC-RAS User’s Manual: Boundary Conditions, U.S. Army Corps of Engineers, accessed: May 8, 2026. [Online]. Available: https: //www.hec.usace.army.mil/confluence/rasdocs/rasum/6.1/performing-a -1d-unsteady-flow-analysis/entering-and-editing-unsteady-flow-data/ boundary-conditions
2026
-
[9]
A Simple Inertial Formu- lation of the Shallow Water Equations for Efficient Two-Dimensional Flood Inundation Modelling,
P. D. Bates, M. S. Horritt, and T. J. Fewtrell, “A Simple Inertial Formu- lation of the Shallow Water Equations for Efficient Two-Dimensional Flood Inundation Modelling,”Journal of Hydrology, vol. 387, no. 1–2, pp. 33–45, 2010
2010
-
[10]
Applicability of the Local Inertial Approximation of the Shallow Water Equations to Flood Modeling,
G. A. M. de Almeida and P. Bates, “Applicability of the Local Inertial Approximation of the Shallow Water Equations to Flood Modeling,” Water Resources Research, vol. 49, no. 8, pp. 4833–4844, 2013
2013
-
[11]
Beaver Bayou HEC-RAS 2D Project Files,
U.S. Army Corps of Engineers, New Orleans District, “Beaver Bayou HEC-RAS 2D Project Files,” 2026, privately provided dataset
2026
-
[12]
Hy- draulic Model (HEC-RAS) of the Upper San Saba River between Fort McKavett and Menard, TX,
A. Harris, S. Wiest, K. Cushway, Z. Mitchell, and A. Schwalb, “Hy- draulic Model (HEC-RAS) of the Upper San Saba River between Fort McKavett and Menard, TX,” 2023, dataset
2023
-
[13]
Hydraulic (HEC- RAS) Model of the Lower San Saba River between Harkeyville and San Saba, TX, USA,
A. Harris, K. Cushway, Z. Mitchell, and A. Schwalb, “Hydraulic (HEC- RAS) Model of the Lower San Saba River between Harkeyville and San Saba, TX, USA,” 2024, dataset
2024
-
[14]
Hydraulic Model (HEC-RAS) of Downstream of Tuttle Creek Reservoir at the Confluence of the Big Blue River and the Kansas River near Manhattan, KS,
S. Wiest, A. Harris, and D. Hernandez-Abrams, “Hydraulic Model (HEC-RAS) of Downstream of Tuttle Creek Reservoir at the Confluence of the Big Blue River and the Kansas River near Manhattan, KS,” 2024, dataset
2024
-
[15]
Army Corps of Engineers, Hydrologic Engineering Center,HEC- RAS 2D User’s Manual: 2D Computation Options and Tolerances, U.S
U.S. Army Corps of Engineers, Hydrologic Engineering Center,HEC- RAS 2D User’s Manual: 2D Computation Options and Tolerances, U.S. Army Corps of Engineers, accessed: May 8, 2026. [Online]. Available: https://www.hec.usace.army.mil/confluence/rasdocs/r2dum/6.5/running -a-model-with-2d-flow-areas/2d-computation-options-and-tolerances IEEE TRANSACTIONS ON [J...
2026
-
[16]
Army Corps of Engineers, accessed: May 8, 2026
——,HEC-RAS User’s Manual: Working with Projects, U.S. Army Corps of Engineers, accessed: May 8, 2026. [Online]. Available: https://www.hec.usace.army.mil/confluence/rasdocs/rasum/6.4/working -with-projects
2026
-
[17]
Deep Learning Hydrodynamic Forecasting for Flooded Region Assessment in Near-Real-Time,
F. Haces-Garcia, N. Maslennikova, C. L. Glennie, H. S. Rifai, V . Hoskere, and N. Ekhtari, “Deep Learning Hydrodynamic Forecasting for Flooded Region Assessment in Near-Real-Time,” 2023. [Online]. Available: https://arxiv.org/abs/2305.12052
arXiv 2023
-
[18]
Fast Simulation and Prediction of Urban Pluvial Floods Using a Deep Convolutional Neural Network Model,
Y . Liao, Z. Wang, X. Chen, and C. Lai, “Fast Simulation and Prediction of Urban Pluvial Floods Using a Deep Convolutional Neural Network Model,”Journal of Hydrology, vol. 624, p. 129945, 2023
2023
-
[19]
Rapid Prediction Model for Urban Floods Based on a Light Gradient Boosting Machine Approach and Hydrological–Hydraulic Model,
K. Xu, Z. Han, H. Xu, and L. Bin, “Rapid Prediction Model for Urban Floods Based on a Light Gradient Boosting Machine Approach and Hydrological–Hydraulic Model,”International Journal of Disaster Risk Science, vol. 14, no. 1, pp. 79–97, 2023
2023
-
[20]
Deep Vision-Based Framework for Coastal Flood Prediction under Sea Level Rise and Shoreline Protection,
A. Karapetyan, A. C. H. Chow, and S. Madanat, “Deep Vision-Based Framework for Coastal Flood Prediction under Sea Level Rise and Shoreline Protection,”Scientific Reports, vol. 16, p. 3663, 2026
2026
-
[21]
A Hybrid CNN-LSTM Sur- rogate Model for Hyper-Resolution Spatiotemporal Flood Forecasting in Norfolk, Virginia,
Y . Wang, J. L. Goodall, C. Kumar, D. McSpadden, S. A. Barbosa, B. Roy, A. Shahabi, and N. Tahvildari, “A Hybrid CNN-LSTM Sur- rogate Model for Hyper-Resolution Spatiotemporal Flood Forecasting in Norfolk, Virginia,”Journal of Hydrology: Regional Studies, vol. 64, p. 103234, 2026
2026
-
[22]
U-Net: Convolutional Net- works for Biomedical Image Segmentation,
O. Ronneberger, P. Fischer, and T. Brox, “U-Net: Convolutional Net- works for Biomedical Image Segmentation,” inMedical Image Comput- ing and Computer-Assisted Intervention, 2015, pp. 234–241
2015
-
[23]
Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting,
X. Shi, Z. Chen, H. Wang, D.-Y . Yeung, W.-K. Wong, and W.-c. Woo, “Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting,” inAdvances in Neural Information Processing Systems, 2015. [Online]. Available: https: //proceedings.neurips.cc/paper/2015/hash/07563a3fe3bbe7e3ba84431ad 9d055af-Abstract.html
2015
-
[24]
Learning Mesh-Based Simulation with Graph Networks,
T. Pfaff, M. Fortunato, A. Sanchez-Gonzalez, and P. W. Battaglia, “Learning Mesh-Based Simulation with Graph Networks,” in International Conference on Learning Representations, 2021. [Online]. Available: https://openreview.net/forum?id=roNqYL0 XP
2021
-
[25]
Fourier Neural Operator with Learned Deformations for PDEs on General Geometries,
Z. Li, D. Z. Huang, B. Liu, and A. Anandkumar, “Fourier Neural Operator with Learned Deformations for PDEs on General Geometries,” Journal of Machine Learning Research, vol. 24, no. 388, pp. 1–26,
-
[26]
Available: https://jmlr.org/papers/v24/23-0064.html
[Online]. Available: https://jmlr.org/papers/v24/23-0064.html
-
[27]
Geometry-Informed Neural Operator for Large-Scale 3D PDEs,
Z. Li, N. Kovachki, C. Choy, B. Li, J. Kossaifi, S. P. Otta, M. A. Nabian, M. Stadler, C. Hundt, K. Azizzadenesheli, and A. Anandkumar, “Geometry-Informed Neural Operator for Large-Scale 3D PDEs,” in Advances in Neural Information Processing Systems, 2023. [Online]. Available: https://arxiv.org/abs/2309.00583
arXiv 2023
-
[28]
Dynamic Mode Decomposition of Numerical and Exper- imental Data,
P. J. Schmid, “Dynamic Mode Decomposition of Numerical and Exper- imental Data,”Journal of Fluid Mechanics, vol. 656, pp. 5–28, 2010
2010
-
[29]
An Improved Algorithm for the Shallow Water Equations Model Reduction: Dynamic Mode Decompo- sition vs POD,
D. A. Bistrian and I. M. Navon, “An Improved Algorithm for the Shallow Water Equations Model Reduction: Dynamic Mode Decompo- sition vs POD,”International Journal for Numerical Methods in Fluids, vol. 78, no. 9, pp. 552–580, 2015
2015
-
[30]
A Greedy Non-Intrusive Reduced Order Model for Shallow Water Equations,
S. Dutta, M. W. Farthing, E. Perracchione, G. Savant, and M. Putti, “A Greedy Non-Intrusive Reduced Order Model for Shallow Water Equations,”Journal of Computational Physics, vol. 439, p. 110378, 2021
2021
-
[31]
Long Short-Term Memory,
S. Hochreiter and J. Schmidhuber, “Long Short-Term Memory,”Neural Computation, vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[32]
Learning Phrase Representations Using RNN Encoder–Decoder for Statistical Machine Translation,
K. Cho, B. van Merrienboer, C. Gulcehre, D. Bahdanau, F. Bougares, H. Schwenk, and Y . Bengio, “Learning Phrase Representations Using RNN Encoder–Decoder for Statistical Machine Translation,” inProceed- ings of the 2014 Conference on Empirical Methods in Natural Language Processing, 2014, pp. 1724–1734
2014
-
[33]
Local-Inertial Shallow Water Model on Unstructured Triangular Grids,
B. Sridharan, P. D. Bates, D. Sen, and S. Nath Kuiry, “Local-Inertial Shallow Water Model on Unstructured Triangular Grids,”Advances in Water Resources, vol. 152, p. 103930, 2021
2021
-
[34]
A Novel Local-Inertial Formulation Representing Subgrid Scale Topographic Effects for Urban Flood Sim- ulation,
N. Nithila Devi and S. N. Kuiry, “A Novel Local-Inertial Formulation Representing Subgrid Scale Topographic Effects for Urban Flood Sim- ulation,”Water Resources Research, vol. 60, no. 5, p. e2023WR035334, 2024
2024
-
[35]
Abdelguerfi, Ed.,3D Synthetic Environment Reconstruction
M. Abdelguerfi, Ed.,3D Synthetic Environment Reconstruction. Springer Science & Business Media, 2001, vol. 611
2001
-
[36]
Geographical Data Interchange Using XML-Enabled Technology within the GIDB System,
R. Wilson, M. Cobb, F. McCreedy, R. Ladner, D. Olivier, T. Lovitt, K. Shaw, F. Petry, and M. Abdelguerfi, “Geographical Data Interchange Using XML-Enabled Technology within the GIDB System,” inXML Data Management, 2003
2003
-
[37]
Hydraulic Splines: A Hybrid Approach to Modeling River Channel Geometries,
M. Flanagin, A. Grenotton, J. Ratcliff, K. B. Shaw, J. Sample, and M. Abdelguerfi, “Hydraulic Splines: A Hybrid Approach to Modeling River Channel Geometries,”Computing in Science & Engineering, vol. 9, no. 5, pp. 4–15, 2007
2007
-
[38]
Efficient AKNN Spatial Network Queries Using the M-tree,
E. Ioup, K. Shaw, J. Sample, and M. Abdelguerfi, “Efficient AKNN Spatial Network Queries Using the M-tree,” inProceedings of the 15th Annual ACM International Symposium on Advances in Geographic Information Systems, 2007, pp. 1–4
2007
-
[39]
Ladner, K
R. Ladner, K. Shaw, and M. Abdelguerfi, Eds.,Mining Spatio-Temporal Information Systems. Springer Science & Business Media, 2012, vol. 699
2012
-
[40]
Accelerating HEC-RAS: A Recurrent Neural Operator for Rapid River Forecasting,
E. Holmberg, P. Pokhrel, M. Zoch, E. Ioup, K. Pathak, S. Sloan, K. Niles, J. Ratcliff, M. Flanagin, C. Guetl, J. Simeonov, and M. Abdelguerfi, “Accelerating HEC-RAS: A Recurrent Neural Operator for Rapid River Forecasting,” 2025. [Online]. Available: https://arxiv.org/abs/2507.15614
arXiv 2025
-
[41]
Army Corps of Engineers, Hydrologic Engineering Center, HEC-RAS Mapper User’s Manual: Managing Results Maps, U.S
U.S. Army Corps of Engineers, Hydrologic Engineering Center, HEC-RAS Mapper User’s Manual: Managing Results Maps, U.S. Army Corps of Engineers, accessed: May 8, 2026. [Online]. Available: https://www.hec.usace.army.mil/confluence/rasdocs/rmum/latest/mappi ng-results/managing-results-maps
2026
-
[42]
Leakage in Data Mining: Formulation, Detection, and Avoidance,
S. Kaufman, S. Rosset, C. Perlich, and O. Stitelman, “Leakage in Data Mining: Formulation, Detection, and Avoidance,”ACM Transactions on Knowledge Discovery from Data, vol. 6, no. 4, p. 15, 2012
2012
-
[43]
Hastie, R
T. Hastie, R. Tibshirani, and J. Friedman,The Elements of Statistical Learning: Data Mining, Inference, and Prediction, 2nd ed. New York, NY , USA: Springer, 2009
2009
-
[44]
Root Mean Square Error (RMSE) or Mean Absolute Error (MAE)? Arguments Against Avoiding RMSE in the Literature,
T. Chai and R. R. Draxler, “Root Mean Square Error (RMSE) or Mean Absolute Error (MAE)? Arguments Against Avoiding RMSE in the Literature,”Geoscientific Model Development, vol. 7, no. 3, pp. 1247– 1250, 2014
2014
-
[45]
Jain,The Art of Computer Systems Performance Analysis: Techniques for Experimental Design, Measurement, Simulation, and Modeling
R. Jain,The Art of Computer Systems Performance Analysis: Techniques for Experimental Design, Measurement, Simulation, and Modeling. New York, NY , USA: Wiley, 1991
1991
-
[46]
Rapid Flood Inundation Forecast Using Fourier Neural Operator,
A. Y . Sun, Z. Li, W. Lee, Q. Huang, B. R. Scanlon, and C. Dawson, “Rapid Flood Inundation Forecast Using Fourier Neural Operator,”
-
[47]
Available: https://arxiv.org/abs/2307.16090
[Online]. Available: https://arxiv.org/abs/2307.16090
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.