Inverse Design of Metainterfaces for Static Friction Control: Beyond the Hertzian Limit
Pith reviewed 2026-05-20 22:58 UTC · model grok-4.3
The pith
General axisymmetric asperities enable inverse design of metainterfaces that achieve arbitrary nonlinear static friction laws.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
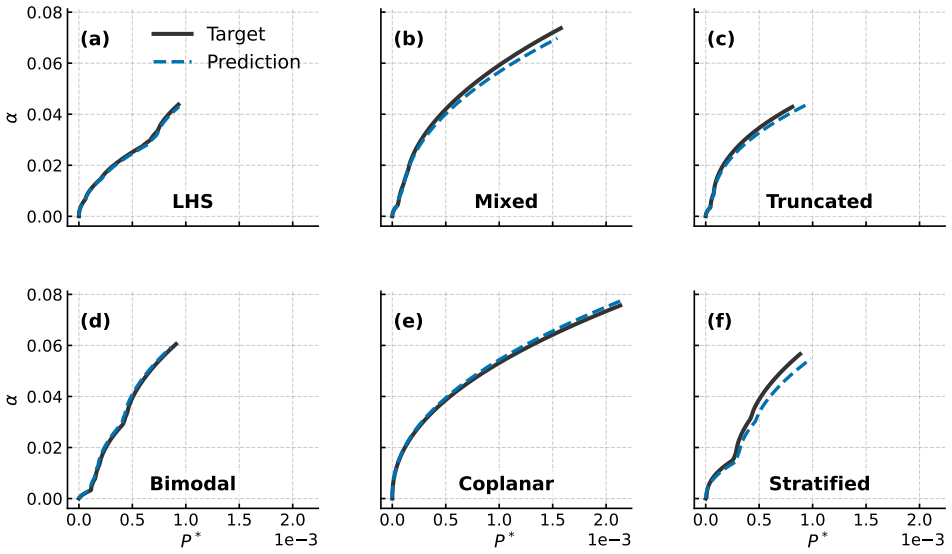
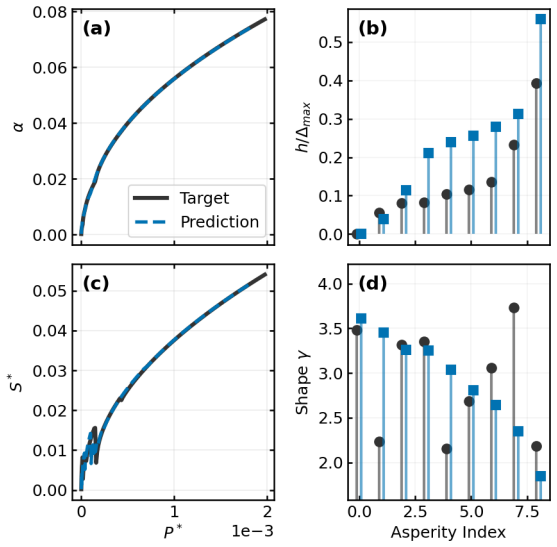
A fully differentiable contact mechanics engine is embedded in a neural-network-plus-optimizer pipeline that automatically discovers non-Hertzian axisymmetric asperity topographies whose collective real contact area reproduces prescribed nonlinear friction-force versus load relations, using only a small number of asperities per unit cell and with results validated by independent boundary-element simulations.
What carries the argument
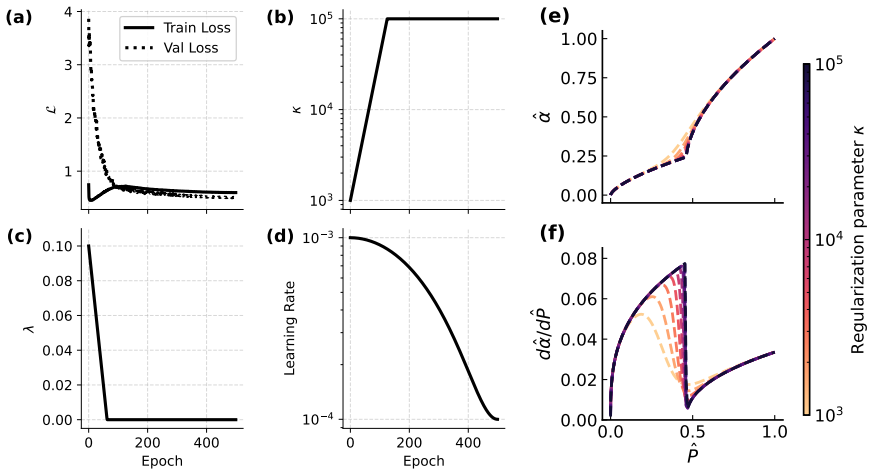
Regularized physical gradients through a differentiable contact solver that computes real contact area for arbitrary axisymmetric shapes and feeds the result directly into a quadratic optimizer.
If this is right
- Surfaces can be engineered to exhibit any desired friction-load curve rather than being restricted to linear scaling.
- Complex target behaviors become achievable with only a few asperities per periodic cell.
- The same differentiable-physics loop can be reused for other contact quantities such as stiffness or thermal resistance.
- Scale-invariant designs become possible because the optimization operates on normalized geometry and load.
Where Pith is reading between the lines
- The framework could be extended to include adhesion or viscoelasticity once the underlying solver incorporates those effects.
- Fabrication tolerances on asperity height and curvature would need to be quantified to determine how closely real devices match the predicted curves.
- Similar inverse-design loops might apply to controlling other interface properties such as electrical contact resistance or fluid leakage.
Load-bearing premise
The differentiable contact engine must correctly compute real contact area and its dependence on load for any axisymmetric shape so that the optimized profiles remain physically realizable.
What would settle it
Fabricate the optimized asperity arrays and measure the static friction force as a function of normal load to test whether the experimental curve matches the target nonlinear law within measurement uncertainty.
Figures





read the original abstract
Programming the static friction of mechanical interfaces is critical for soft robotics, haptics, and precision gripping. Static friction is governed by the real contact area, and standard rough surfaces exhibit a linear area-load scaling inherent to classical Archard and Greenwood-Williamson models, severely restricting their functional range. Here, we propose a framework for the inverse design of tribological metainterfaces engineered for programmable contact behaviors. By utilizing general axisymmetric asperities, we unlock nonlinear macroscopic responses unattainable by standard Hertzian contacts. To solve the inverse problem, we embed a fully differentiable contact mechanics engine within a neural network and a quadratic optimizer. We leverage regularized physical gradients to automatically discover non-standard topographies that reproduce complex target friction laws, with only a few asperities in unit cells. The predicted designs are strictly validated against high-fidelity Boundary Element Method (BEM) simulations. This framework bridges data-driven optimization and rigorous physics, offering a scale-invariant pathway for discovering functional tribological surfaces.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a framework for inverse design of tribological metainterfaces to program static friction beyond the linear area-load scaling of Hertzian contacts. It uses general axisymmetric asperities in unit cells, embeds a fully differentiable contact mechanics engine inside a neural network and quadratic optimizer, and employs regularized physical gradients to discover non-standard topographies that match complex target friction laws. Final designs are validated against high-fidelity BEM simulations.
Significance. If the central results hold, the work offers a scale-invariant, physics-constrained route to custom nonlinear friction responses with minimal asperities per cell. This could impact soft robotics, haptics, and precision gripping by moving beyond Archard/Greenwood-Williamson restrictions. The combination of differentiable physics with optimization is a methodological strength that enables automated discovery while retaining physical interpretability.
major comments (1)
- [Method (differentiable contact mechanics engine) and Results (validation)] The central claim requires that the embedded differentiable contact mechanics engine produces real-contact-area predictions whose load dependence is sufficiently faithful to BEM for arbitrary (non-spherical) axisymmetric profiles. The abstract states that final designs are “strictly validated” against BEM, yet no quantitative benchmark (error metrics, load-area curves, or direct comparison) is provided for the non-standard shapes that appear in the optimized solutions. If the surrogate deviates systematically from BEM on those profiles, the optimizer can converge to topographies that satisfy the surrogate but fail the true physics. Please add a dedicated validation subsection with direct engine-vs-BEM comparisons on representative optimized asperity shapes.
minor comments (1)
- [Abstract] The abstract refers to “regularized physical gradients” without specifying the regularization form or strength; a brief parenthetical or reference would improve clarity.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review of our manuscript. The feedback on validation of the differentiable contact mechanics engine is well taken, and we have prepared a point-by-point response below. We agree that strengthening the quantitative comparison for optimized non-standard profiles will improve the paper.
read point-by-point responses
-
Referee: [Method (differentiable contact mechanics engine) and Results (validation)] The central claim requires that the embedded differentiable contact mechanics engine produces real-contact-area predictions whose load dependence is sufficiently faithful to BEM for arbitrary (non-spherical) axisymmetric profiles. The abstract states that final designs are “strictly validated” against BEM, yet no quantitative benchmark (error metrics, load-area curves, or direct comparison) is provided for the non-standard shapes that appear in the optimized solutions. If the surrogate deviates systematically from BEM on those profiles, the optimizer can converge to topographies that satisfy the surrogate but fail the true physics. Please add a dedicated validation subsection with direct engine-vs-BEM comparisons on representative optimized asperity shapes.
Authors: We agree that explicit quantitative validation for the non-standard axisymmetric profiles discovered by the optimizer is necessary to fully support the central claims. Although the manuscript states that final designs are validated against high-fidelity BEM, we acknowledge that a dedicated subsection presenting error metrics, load-area curves, and direct comparisons specifically for the optimized (non-Hertzian) shapes was not included in the main text. We will add a new subsection in the Results section that reports these benchmarks, including relative errors in predicted contact area, overlaid load-area curves, and representative profile comparisons between the differentiable engine and BEM. This revision will demonstrate that the surrogate remains faithful for the relevant topographies and that the optimizer does not exploit systematic deviations. revision: yes
Circularity Check
No significant circularity; optimization and validation remain independent
full rationale
The paper embeds a differentiable contact mechanics engine inside an optimizer to discover axisymmetric asperity topographies that match prescribed target friction laws, then validates the resulting designs against separate high-fidelity BEM simulations. No equation or step in the abstract or described workflow shows the target law or optimized topography reducing to a fitted parameter by construction, nor does any load-bearing premise rest on a self-citation chain. The use of regularized physical gradients and external BEM checks keeps the central claim self-contained against independent benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Static friction is governed by the real contact area.
Reference graph
Works this paper leans on
-
[1]
Introduction, in: Allgower, E.L., Georg, K
Allgower, E.L., Georg, K., 1990. Introduction, in: Allgower, E.L., Georg, K. (Eds.), Numerical Continuation Methods: An Introduction. Springer, Berlin, Heidelberg, pp. 1–6. URL:https: //doi.org/10.1007/978-3-642-61257-2_1, doi:10.1007/978-3-642-61257-2_1
-
[2]
Elastic deformation and the laws of friction
Archard, J.F., Allibone, T.E., 1997. Elastic deformation and the laws of friction. Pro- ceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences 243, 190–205. URL:https://royalsocietypublishing.org/doi/10.1098/rspa.1957.0214, doi:10. 1098/rspa.1957.0214
-
[3]
de Avila Belbute-Peres, F., Smith, K., Allen, K., Tenenbaum, J., Kolter, J.Z., 2018. End-to-End Differentiable Physics for Learning and Control, in: Advances in Neural Information Processing Systems, Curran Associates, Inc. URL:https://papers.nips.cc/paper_files/paper/2018/ hash/842424a1d0595b76ec4fa03c46e8d755-Abstract.html
work page 2018
-
[4]
Designing metainterfaces with specified friction laws
Aymard, A., Delplanque, E., Dalmas, D., Scheibert, J., 2024. Designing metainterfaces with specified friction laws. Science 383, 200–204. URL:https://www.science.org/doi/10.1126/ science.adk4234, doi:10.1126/science.adk4234
-
[5]
Bengio, Y., Louradour, J., Collobert, R., Weston, J., 2009. Curriculum learning, in: Proceedings of the 26th Annual International Conference on Machine Learning, Association for Computing Machinery, New York, NY, USA. pp. 41–48. URL:https://dl.acm.org/doi/10.1145/1553374. 1553380, doi:10.1145/1553374.1553380
-
[6]
Bessa, M.A., Bostanabad, R., Liu, Z., Hu, A., Apley, D.W., Brinson, C., Chen, W., Liu, W.K.,
-
[8]
Fluid-mediated impact of soft solids
Bilotto, J., Kolinski, J.M., Lecampion, B., Molinari, J.F., Subhash, G., Garcia-Suarez, J., 2024. Fluid-mediated impact of soft solids. Journal of Fluid Mechanics 997, A35. URL:https://www.cambridge.org/core/journals/journal-of-fluid-mechanics/article/ fluidmediated-impact-of-soft-solids/E208CFA7E3181F48FB66DCE0DF20A182, doi:10.1017/ jfm.2024.820
work page 2024
-
[9]
Bonari, J., Paggi, M., Dini, D., 2022. A new finite element paradigm to solve contact prob- lems with roughness. International Journal of Solids and Structures 253, 111643. URL: https://www.sciencedirect.com/science/article/pii/S0020768322001640, doi:10.1016/j. ijsolstr.2022.111643
work page doi:10.1016/j 2022
-
[10]
Application des potentiels à l’étude de l’équilibre et du mouve- ment des solides élastiques
Boussinesq, J., 1885. Application des potentiels à l’étude de l’équilibre et du mouve- ment des solides élastiques. Gauthier-Villars. URL:https://gallica.bnf.fr/ark:/12148/ bpt6k9651115r
-
[11]
Oxford Univer- sity Press (2018).https://doi.org/10.1093/oso/9780198814788.001.0001
Bowden, F.P., Tabor, D., 2001. Area of Contact Between Solids, in: Bowden, F.P., Tabor, D. (Eds.), The Friction and Lubrication of Solids. Oxford University Press, p. 0. URL:https:// doi.org/10.1093/oso/9780198507772.003.0002, doi:10.1093/oso/9780198507772.003.0002. 13
-
[12]
The role of adhesion in contact mechanics
Ciavarella, M., Joe, J., Papangelo, A., Barber, J.R., 2019. The role of adhesion in contact mechanics. Journal of The Royal Society Interface 16, 20180738. URL:https://doi.org/10. 1098/rsif.2018.0738, doi:10.1098/rsif.2018.0738
-
[13]
Inverse design and flexible parameterization of meta-optics using algorithmic differentiation
Colburn, S., Majumdar, A., 2021. Inverse design and flexible parameterization of meta-optics using algorithmic differentiation. Communications Physics 4, 65. URL:https://www.nature. com/articles/s42005-021-00568-6, doi:10.1038/s42005-021-00568-6
-
[14]
Squeaking at soft–rigid frictional interfaces
Djellouli, A., Albertini, G., Wilt, J., Tournat, V., Weitz, D., Rubinstein, S., Bertoldi, K., 2026. Squeaking at soft–rigid frictional interfaces. Nature 650, 891–897. URL:https://www.nature. com/articles/s41586-026-10132-3, doi:10.1038/s41586-026-10132-3
-
[15]
JOSS5(51), 2121 (2020) https://doi
Frérot, L., Anciaux, G., Rey, V., Pham-Ba, S., Molinari, J.F., 2020. Tamaas: a library for elastic-plastic contact of periodic rough surfaces. Journal of Open Source Software 5, 2121. URL: https://joss.theoj.org/papers/10.21105/joss.02121, doi:10.21105/joss.02121
-
[16]
Elastische Beanspruchung des Erdbodens unter Fundamenten
Föppl, L., 1941. Elastische Beanspruchung des Erdbodens unter Fundamenten. Forschung auf dem Gebiet des Ingenieurwesens A 12, 31–39. URL:https://doi.org/10.1007/BF02593958, doi:10.1007/BF02593958
-
[17]
A Matter of Shape: Contact Area Optimization in Soft Lubricated Impact
Garcia-Suarez, J., 2026. A Matter of Shape: Contact Area Optimization in Soft Lubricated Impact. Tribology Letters 74, 15. URL:https://doi.org/10.1007/s11249-026-02108-1, doi:10.1007/s11249-026-02108-1
-
[18]
Greenwood, J.A., Williamson, J.B.P., Bowden, F.P., 1997. Contact of nominally flat surfaces. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences 295, 300–319. URL:https://royalsocietypublishing.org/doi/10.1098/rspa.1966.0242, doi:10. 1098/rspa.1966.0242
-
[19]
Elastic-Plastic Contact Analysis of a Sphere and a Rigid Flat
Kogut, L., Etsion, I., 2002. Elastic-Plastic Contact Analysis of a Sphere and a Rigid Flat. Journal of Applied Mechanics 69, 657–662. URL:https://doi.org/10.1115/1.1490373, doi:10.1115/ 1.1490373
-
[20]
Inverse-designed spinodoid meta- materials
Kumar, S., Tan, S., Zheng, L., Kochmann, D.M., 2020. Inverse-designed spinodoid meta- materials. npj Computational Materials 6, 1–10. URL:https://www.nature.com/articles/ s41524-020-0341-6, doi:10.1038/s41524-020-0341-6
-
[21]
Training Deep Neural Networks for the Inverse Design of Nanophotonic Structures
Liu, D., Tan, Y., Khoram, E., Yu, Z., 2018. Training Deep Neural Networks for the Inverse Design of Nanophotonic Structures. ACS Photonics 5, 1365–1369. URL:https://doi.org/10.1021/ acsphotonics.7b01377, doi:10.1021/acsphotonics.7b01377
-
[22]
Decoupled Weight Decay Regularization
Loshchilov, I., Hutter, F., 2019. Decoupled Weight Decay Regularization. URL:http://arxiv. org/abs/1711.05101, doi:10.48550/arXiv.1711.05101. arXiv:1711.05101 [cs]
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1711.05101 2019
-
[23]
A Review of Advances in Fabrication Methods and Assistive Technologies of Micro-Structured Surfaces
Ma, Y., Zhang, G., Cao, S., Huo, Z., Han, J., Ma, S., Huang, Z., 2023. A Review of Advances in Fabrication Methods and Assistive Technologies of Micro-Structured Surfaces. Processes 11,
work page 2023
-
[24]
URL:https://www.mdpi.com/2227-9717/11/5/1337, doi:10.3390/pr11051337
-
[25]
McKay, M.D., Beckman, R.J., Conover, W.J., 1979. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 21, 239–245. URL:https://www.jstor.org/stable/1268522, doi:10.2307/1268522
-
[26]
Friction on demand: A generative framework for the inverse design of metainterfaces
Mouton, V., Mélot, A., 2026. Friction on demand: A generative framework for the inverse design of metainterfaces. Tribology International 218, 111724. URL:https://www.sciencedirect.com/ science/article/pii/S0301679X26000666, doi:10.1016/j.triboint.2026.111724
-
[27]
Tailoring Frictional Properties of Surfaces Using Diffusion Models
Nordhagen, E., Sveinsson, H.A., Malthe-Sørenssen, A., 2025. Tailoring Frictional Properties of Surfaces Using Diffusion Models. The Journal of Physical Chemistry C 129, 14559–14564. URL: https://pubs.acs.org/doi/10.1021/acs.jpcc.5c02768, doi:10.1021/acs.jpcc.5c02768. 14
-
[28]
Handbook of Contact Mechanics: Exact Solutions of Axisymmetric Contact Problems
Popov, V.L., Heß, M., Willert, E., 2019. Handbook of Contact Mechanics: Exact Solutions of Axisymmetric Contact Problems. Springer Berlin Heidelberg, Berlin, Heidelberg. URL:http: //link.springer.com/10.1007/978-3-662-58709-6, doi:10.1007/978-3-662-58709-6
-
[29]
Frictional Contact of Soft Polymeric Shells
Sahli, R., Mikkelsen, J., Boye, M.S., Dias, M.A., Aghababaei, R., 2024. Frictional Contact of Soft Polymeric Shells. Physical Review Letters 133, 106202. URL:https://link.aps.org/doi/10. 1103/PhysRevLett.133.106202, doi:10.1103/PhysRevLett.133.106202
-
[30]
Why soft contacts are stickier when breaking than when making them
Sanner, A., Kumar, N., Dhinojwala, A., Jacobs, T.D.B., Pastewka, L., 2024. Why soft contacts are stickier when breaking than when making them. Science Advances 10, eadl1277. URL:https: //www.science.org/doi/full/10.1126/sciadv.adl1277, doi:10.1126/sciadv.adl1277
-
[31]
Zur Frage der Druckverteilung unter elastisch gelagerten Tragwerken
Schubert, G., 1942. Zur Frage der Druckverteilung unter elastisch gelagerten Tragwerken. Ingenieur-Archiv 13, 132–147. URL:https://doi.org/10.1007/BF02095912, doi:10.1007/ BF02095912
-
[32]
Real Area of Contact in a Soft Transparent Interface by Particle Exclusion Microscopy
Schulze, K.D., Bennett, A.I., Marshall, S., Rowe, K.G., Dunn, A.C., 2016. Real Area of Contact in a Soft Transparent Interface by Particle Exclusion Microscopy. Journal of Tribology 138. URL: https://doi.org/10.1115/1.4032822, doi:10.1115/1.4032822
-
[33]
Sneddon, I.N., 1965. The relation between load and penetration in the axisymmetric boussinesq problem for a punch of arbitrary profile. International Journal of Engineering Science 3, 47–
work page 1965
-
[34]
URL:https://www.sciencedirect.com/science/article/pii/0020722565900194, doi:10. 1016/0020-7225(65)90019-4
-
[35]
The nonlinear nature of friction
Urbakh, M., Klafter, J., Gourdon, D., Israelachvili, J., 2004. The nonlinear nature of friction. Nature 430, 525–528. URL:https://www.nature.com/articles/nature02750, doi:10.1038/ nature02750
work page 2004
-
[36]
Xu, Y., Li, X., Chen, Q., Zhou, Y., 2024. Persson’s theory of purely normal elastic rough surface contact: A tutorial based on stochastic process theory. International Journal of Solids and Structures 290, 112684. URL:https://www.sciencedirect.com/science/article/pii/ S0020768324000416, doi:10.1016/j.ijsolstr.2024.112684
-
[37]
Xue, T., Liao, S., Gan, Z., Park, C., Xie, X., Liu, W.K., Cao, J., 2023. JAX-FEM: A differen- tiable GPU-accelerated 3D finite element solver for automatic inverse design and mechanistic data science. Computer Physics Communications 291, 108802. URL:https://www.sciencedirect. com/science/article/pii/S0010465523001479, doi:10.1016/j.cpc.2023.108802
-
[38]
The Contact of Elastic Regular Wavy Surfaces Revisited
Yastrebov, V.A., Anciaux, G., Molinari, J.F., 2014. The Contact of Elastic Regular Wavy Surfaces Revisited. TribologyLetters56, 171–183. URL:https://doi.org/10.1007/s11249-014-0395-z, doi:10.1007/s11249-014-0395-z
-
[39]
Friction Anisotropy with Respect to Topographic Orientation
Yu, C., Wang, Q.J., 2012. Friction Anisotropy with Respect to Topographic Orientation. Scientific Reports 2, 988. URL:https://www.nature.com/articles/srep00988, doi:10.1038/srep00988
-
[40]
Normal contact of metainterfaces: The roles of finite size and microcontact interactions
Zeka, D., Blal, N., Fekak, F.E., Duval, A., Gravouil, A., Scheibert, J., 2026. Normal contact of metainterfaces: The roles of finite size and microcontact interactions. Journal of the Mechanics and Physics of Solids 214, 106646. URL:https://www.sciencedirect.com/science/article/ pii/S0022509626001468, doi:10.1016/j.jmps.2026.106646. A Details on Neural Ne...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.