Pilot-Aided MIMO Channel Identification and Linear Deconvolution in Correlated Gaussian Noise
Pith reviewed 2026-06-27 02:26 UTC · model grok-4.3
The pith
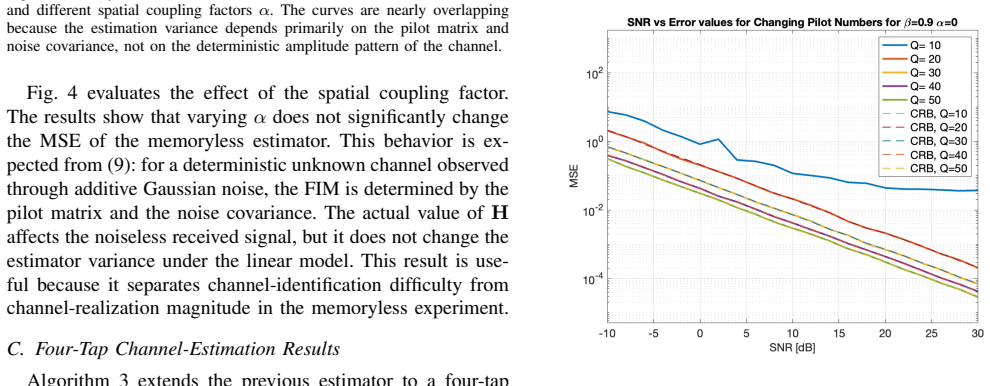
Long pilot blocks let MIMO channel estimates approach the Cramer-Rao bound under correlated Gaussian noise.
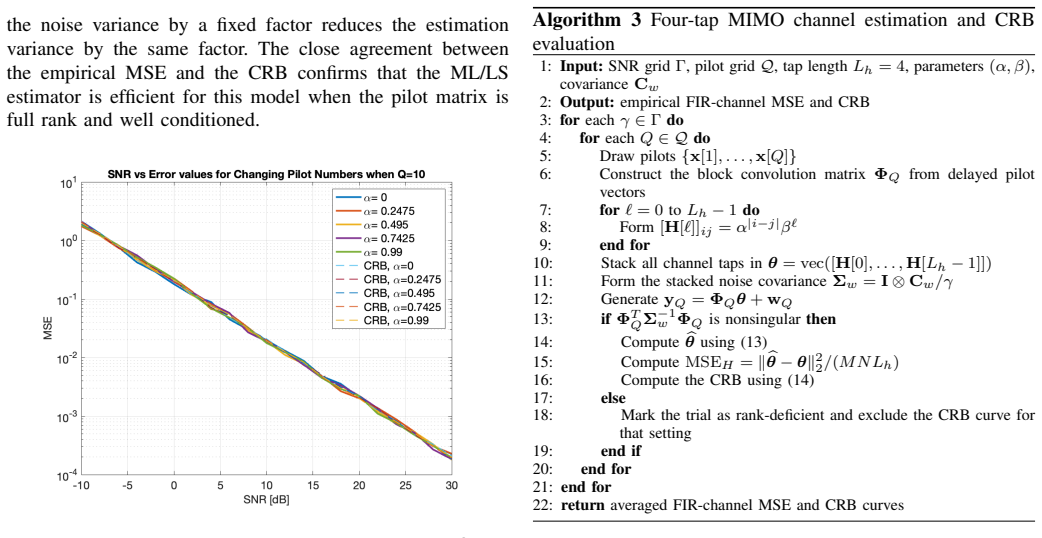
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In both memoryless and four-tap FIR 4x4 MIMO models with correlated Gaussian noise, long and well-conditioned pilot blocks enable the channel estimator to approach the Cramer-Rao lower bound, while short training intervals impose rank and conditioning limitations especially in the four-tap case; the estimated channel then supports linear deconvolution where MMSE regularization yields more stable symbol recovery than unregularized zero-forcing when signal-to-noise ratio is low or estimates are inaccurate.
What carries the argument
Maximum-likelihood or least-squares estimation of the MIMO channel matrix from known pilot symbols, benchmarked against the Cramer-Rao bound, followed by zero-forcing or linear minimum-mean-square-error deconvolution for data recovery.
Load-bearing premise
The noise covariance matrix is known exactly and follows a Toeplitz structure, while the channel length is known in advance.
What would settle it
Simulations that apply short pilot blocks to the four-tap model and measure whether the resulting mean-square error still meets or stays near the Cramer-Rao bound would test the claimed rank and conditioning limitations.
Figures





read the original abstract
This paper presents a pilot-aided study of multiple-input multiple-output (MIMO) channel identification and linear deconvolution under spatially correlated Gaussian noise. A real-valued $4\times4$ baseband model is analyzed for both memoryless and finite-impulse-response channels. The noise process is generated from a Toeplitz covariance matrix, the channel is estimated from pilot symbols through maximum-likelihood/least-squares formulations, and the empirical mean-square error is compared with the Cramer--Rao bound. The estimated channel is then used for data-symbol recovery through maximum-likelihood zero-forcing and linear minimum-mean-square-error deconvolution. The results show that sufficiently long and well-conditioned pilot blocks allow the channel estimator to approach the theoretical lower bound, whereas short training intervals cause rank and conditioning limitations, especially for the four-tap model. The deconvolution experiments further show that MMSE regularization provides a more stable inverse than unregularized zero forcing at low signal-to-noise ratios and for inaccurate channel estimates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a pilot-aided study of 4×4 MIMO channel identification and linear deconvolution under spatially correlated Gaussian noise generated from a known Toeplitz covariance matrix. It analyzes both memoryless and four-tap FIR channel models, performs channel estimation via maximum-likelihood/least-squares formulations from pilot symbols, compares empirical mean-square error to the Cramér-Rao bound, and applies the resulting estimates to data-symbol recovery using maximum-likelihood zero-forcing and linear minimum-mean-square-error deconvolution. The central results indicate that sufficiently long and well-conditioned pilot blocks allow the estimator to approach the theoretical lower bound, while short training intervals induce rank and conditioning limitations (especially for the four-tap model), and that MMSE regularization yields more stable deconvolution than unregularized zero-forcing at low SNR and with inaccurate channel estimates.
Significance. If the results hold under the stated assumptions, the work supplies concrete empirical validation of the Cramér-Rao bound for MIMO channel estimation in correlated noise and quantifies the practical benefits of MMSE regularization in subsequent deconvolution. The direct CRB comparison and the controlled examination of pilot length/conditioning effects constitute clear strengths that aid system-design insight; the simulation framework with explicit model assumptions permits unambiguous interpretation within its scope.
major comments (1)
- [Abstract] Abstract and system-model description: the reported approach of the channel estimator to the CRB with long pilots, and the severity of short-pilot rank issues, rest on the noise covariance matrix being known exactly (Toeplitz structure) and the channel length being known a priori (memoryless or exactly four-tap FIR). The manuscript should explicitly discuss whether these quantities are treated as known or jointly estimated, because the central performance claims are load-bearing on this distinction.
minor comments (2)
- The number of Monte Carlo realizations used for the empirical MSE curves should be stated so that the reader can assess the reliability of the reported proximity to the CRB.
- Figure captions and axis labels should explicitly indicate the pilot lengths, SNR values, and channel models (memoryless vs. four-tap) corresponding to each plotted curve.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on the system-model assumptions. We address the point below and will incorporate the requested clarification.
read point-by-point responses
-
Referee: [Abstract] Abstract and system-model description: the reported approach of the channel estimator to the CRB with long pilots, and the severity of short-pilot rank issues, rest on the noise covariance matrix being known exactly (Toeplitz structure) and the channel length being known a priori (memoryless or exactly four-tap FIR). The manuscript should explicitly discuss whether these quantities are treated as known or jointly estimated, because the central performance claims are load-bearing on this distinction.
Authors: We agree that the assumptions must be stated unambiguously. In the manuscript the noise covariance matrix is generated from a known Toeplitz structure and is treated as known exactly when forming the ML/LS estimator and the CRB; likewise the channel length is known a priori (memoryless or exactly four-tap FIR). Neither quantity is jointly estimated with the channel coefficients. We will revise the abstract and the opening paragraphs of the system-model section to state these assumptions explicitly and to note that the reported CRB approach and rank/conditioning behavior are conditioned on this knowledge. revision: yes
Circularity Check
No significant circularity; standard estimation setup with external CRB benchmark
full rationale
The paper applies maximum-likelihood/least-squares estimation to a MIMO channel under a known Toeplitz noise covariance and known FIR length, then compares empirical MSE to the Cramer-Rao bound. The CRB is an independent theoretical quantity derived from the Fisher information matrix of the assumed model; matching it under the same model is a standard, non-circular verification step performed via direct simulation. No equations reduce a fitted parameter to a prediction by construction, no self-citations are load-bearing for the central claims, and no ansatz or uniqueness result is smuggled in. The derivation chain is self-contained against the external CRB and Monte-Carlo results.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Noise is zero-mean Gaussian with known spatially correlated Toeplitz covariance
- domain assumption Channel is either memoryless or exactly four-tap FIR with known structure
Reference graph
Works this paper leans on
-
[1]
A simple transmit diversity technique for wireless communications,
S. M. Alamouti, “A simple transmit diversity technique for wireless communications,”IEEE Journal on Selected Areas in Communications, vol. 16, no. 8, pp. 1451–1458, 1998
1998
-
[2]
Space-time codes for high data rate wireless communication: Performance criterion and code construction,
V . Tarokh, N. Seshadri, and A. R. Calderbank, “Space-time codes for high data rate wireless communication: Performance criterion and code construction,”IEEE Transactions on Information Theory, vol. 44, no. 2, pp. 744–765, 1998
1998
-
[3]
Layered space-time architecture for wireless commu- nication in a fading environment when using multi-element antennas,
G. J. Foschini, “Layered space-time architecture for wireless commu- nication in a fading environment when using multi-element antennas,” Bell Labs Technical Journal, vol. 1, no. 2, pp. 41–59, 1996
1996
-
[4]
Capacity of multi-antenna Gaussian channels,
I. E. Telatar, “Capacity of multi-antenna Gaussian channels,”European Transactions on Telecommunications, vol. 10, no. 6, pp. 585–595, 1999
1999
-
[5]
Capacity limits of MIMO channels,
A. Goldsmith, S. A. Jafar, N. Jindal, and S. Vishwanath, “Capacity limits of MIMO channels,”IEEE Journal on Selected Areas in Communica- tions, vol. 21, no. 5, pp. 684–702, 2003
2003
-
[6]
Paulraj, R
A. Paulraj, R. Nabar, and D. Gore,Introduction to Space-Time Wireless Communications. Cambridge, U.K.: Cambridge University Press, 2003
2003
-
[7]
Biglieri, R
E. Biglieri, R. Calderbank, A. Constantinides, A. Goldsmith, A. Paulraj, and H. V . Poor,MIMO Wireless Communications. Cambridge, U.K.: Cambridge University Press, 2007
2007
-
[8]
Tse and P
D. Tse and P. Viswanath,Fundamentals of Wireless Communication. Cambridge, U.K.: Cambridge University Press, 2005
2005
-
[9]
Scaling up MIMO: Opportunities and challenges with very large arrays,
F. Rusek, D. Persson, B. K. Lau, E. G. Larsson, T. L. Marzetta, O. Edfors, and F. Tufvesson, “Scaling up MIMO: Opportunities and challenges with very large arrays,”IEEE Signal Processing Magazine, vol. 30, no. 1, pp. 40–60, 2013
2013
-
[10]
Massive MIMO for next generation wireless systems,
E. G. Larsson, O. Edfors, F. Tufvesson, and T. L. Marzetta, “Massive MIMO for next generation wireless systems,”IEEE Communications Magazine, vol. 52, no. 2, pp. 186–195, 2014
2014
-
[11]
Massive MIMO networks: Spectral, energy, and hardware efficiency,
E. Björnson, J. Hoydis, and L. Sanguinetti, “Massive MIMO networks: Spectral, energy, and hardware efficiency,”Foundations and Trends in Signal Processing, vol. 11, no. 3–4, pp. 154–655, 2017
2017
-
[12]
BLAST training: Estimating channel characteristics for high-capacity space-time wireless,
T. L. Marzetta, “BLAST training: Estimating channel characteristics for high-capacity space-time wireless,” inProc. 37th Annual Allerton Conference on Communication, Control, and Computing, 1999, pp. 958– 966
1999
-
[13]
How much training is needed in multiple-antenna wireless links?
B. Hassibi and B. M. Hochwald, “How much training is needed in multiple-antenna wireless links?”IEEE Transactions on Information Theory, vol. 49, no. 4, pp. 951–963, 2003
2003
-
[14]
Cramér,Mathematical Methods of Statistics
H. Cramér,Mathematical Methods of Statistics. Princeton, NJ, USA: Princeton University Press, 1946
1946
-
[15]
Information and the accuracy attainable in the estimation of statistical parameters,
C. R. Rao, “Information and the accuracy attainable in the estimation of statistical parameters,”Bulletin of the Calcutta Mathematical Society, vol. 37, pp. 81–91, 1945
1945
-
[16]
S. M. Kay,Fundamentals of Statistical Signal Processing: Estimation Theory. Upper Saddle River, NJ, USA: Prentice Hall, 1993
1993
-
[17]
H. L. Van Trees,Detection, Estimation, and Modulation Theory, Part I, 2nd ed. New York, NY , USA: Wiley, 2001
2001
-
[18]
H. V . Poor,An Introduction to Signal Detection and Estimation, 2nd ed. New York, NY , USA: Springer, 1994
1994
-
[19]
Kailath, A
T. Kailath, A. H. Sayed, and B. Hassibi,Linear Estimation. Upper Saddle River, NJ, USA: Prentice Hall, 2000
2000
-
[20]
Ljung,System Identification: Theory for the User, 2nd ed
L. Ljung,System Identification: Theory for the User, 2nd ed. Upper Saddle River, NJ, USA: Prentice Hall, 1999
1999
-
[21]
Söderström and P
T. Söderström and P. Stoica,System Identification. Hemel Hempstead, U.K.: Prentice Hall International, 1989
1989
-
[22]
L. L. Scharf,Statistical Signal Processing: Detection, Estimation, and Time Series Analysis. Reading, MA, USA: Addison-Wesley, 1991
1991
-
[23]
R. M. Gray,Toeplitz and Circulant Matrices: A Review. Hanover, MA, USA: Now Publishers, 2006
2006
-
[24]
Kronecker products and matrix calculus in system theory,
J. W. Brewer, “Kronecker products and matrix calculus in system theory,”IEEE Transactions on Circuits and Systems, vol. 25, no. 9, pp. 772–781, 1978
1978
-
[25]
R. A. Horn and C. R. Johnson,Matrix Analysis, 2nd ed. Cambridge, U.K.: Cambridge University Press, 2012
2012
-
[26]
J. G. Proakis and M. Salehi,Digital Communications, 5th ed. New York, NY , USA: McGraw-Hill, 2008
2008
-
[27]
Verdú,Multiuser Detection
S. Verdú,Multiuser Detection. Cambridge, U.K.: Cambridge University Press, 1998
1998
-
[28]
Wiener,Extrapolation, Interpolation, and Smoothing of Stationary Time Series
N. Wiener,Extrapolation, Interpolation, and Smoothing of Stationary Time Series. Cambridge, MA, USA: MIT Press, 1949
1949
-
[29]
Haykin,Adaptive Filter Theory, 5th ed
S. Haykin,Adaptive Filter Theory, 5th ed. Upper Saddle River, NJ, USA: Pearson, 2014
2014
-
[30]
A. H. Sayed,Adaptive Filters. Hoboken, NJ, USA: Wiley, 2008
2008
-
[31]
A. V . Oppenheim and R. W. Schafer,Discrete-Time Signal Processing, 3rd ed. Upper Saddle River, NJ, USA: Pearson, 2010
2010
-
[32]
Adaptive equalization,
S. U. H. Qureshi, “Adaptive equalization,”Proceedings of the IEEE, vol. 73, no. 9, pp. 1349–1387, 1985
1985
-
[33]
Widrow and S
B. Widrow and S. D. Stearns,Adaptive Signal Processing. Englewood Cliffs, NJ, USA: Prentice Hall, 1985
1985
-
[34]
A. N. Tikhonov and V . Y . Arsenin,Solutions of Ill-Posed Problems. Washington, DC, USA: Winston, 1977
1977
-
[35]
P. C. Hansen,Rank-Deficient and Discrete Ill-Posed Problems: Numer- ical Aspects of Linear Inversion. Philadelphia, PA, USA: SIAM, 1998
1998
-
[36]
G. H. Golub and C. F. Van Loan,Matrix Computations, 4th ed. Baltimore, MD, USA: Johns Hopkins University Press, 2013
2013
-
[37]
Björck,Numerical Methods for Least Squares Problems
A. Björck,Numerical Methods for Least Squares Problems. Philadel- phia, PA, USA: SIAM, 1996
1996
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.