Convex training of Lipschitz-regularized shallow neural networks
Pith reviewed 2026-06-26 20:37 UTC · model grok-4.3
The pith
A convex restriction of the Lipschitz-regularized objective yields shallow networks with lower objective values and, on some datasets, higher accuracy plus adversarial robustness.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
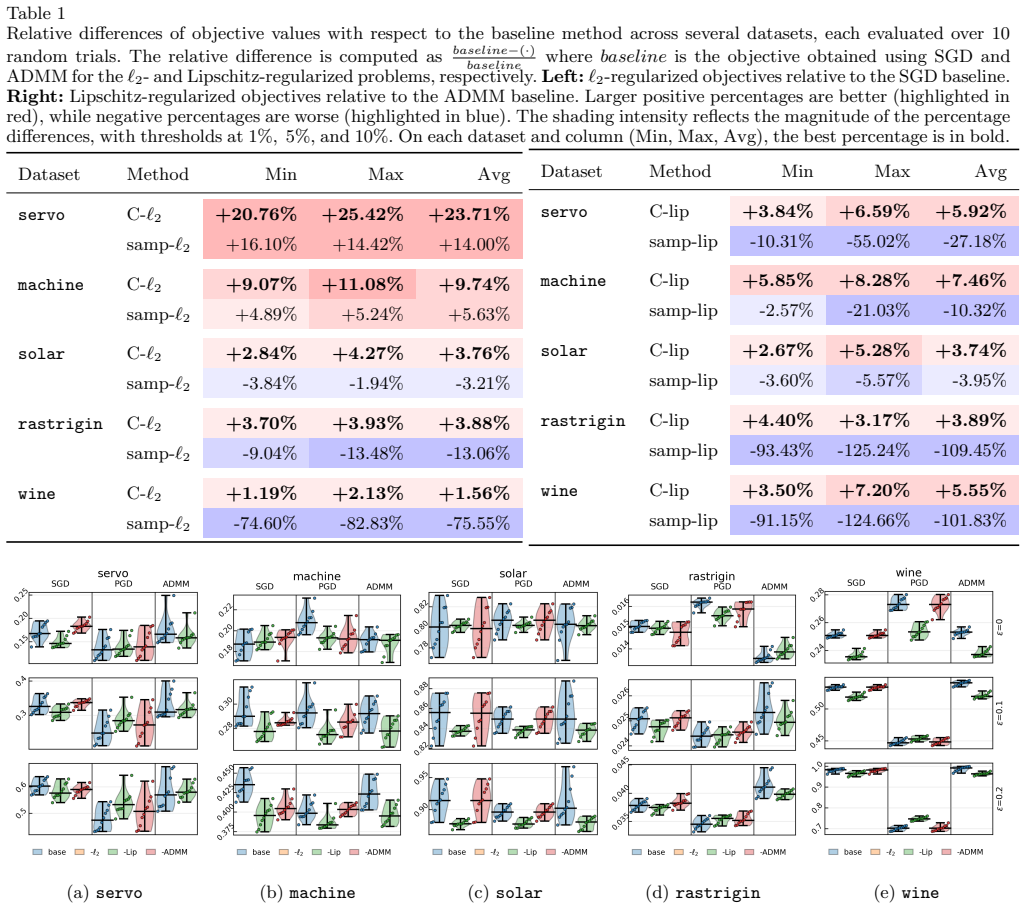
The central claim is that a convex restriction of the non-convex Lipschitz-regularized training objective for shallow neural networks can be solved globally, and the resulting networks achieve lower values of the original regularized objective than existing methods while guaranteeing no degradation relative to a pre-trained initialization; on some datasets these networks are also more accurate and more robust to adversarial attacks.
What carries the argument
The convex restriction of the non-convex Lipschitz-regularized training objective, which enables global optimality while preserving performance guarantees on the original problem.
If this is right
- The method produces networks with strictly lower Lipschitz-regularized objective values than existing training procedures.
- On selected datasets the networks exhibit both higher accuracy and higher adversarial robustness.
- The procedure can be run as post-processing on any pre-trained shallow network without risking worse performance on the regularized objective.
- Global optimality of the restricted program is achieved efficiently for shallow architectures.
Where Pith is reading between the lines
- The same convex-restriction idea might be tested on deeper networks if analogous restrictions can be derived without losing the global-optimality guarantee.
- The numerical improvement in the regularized objective suggests that Lipschitz regularization can serve as a direct, non-adversarial route to robustness when the program is solved globally.
- If the relaxation gap is small on typical data, the method could reduce reliance on heuristic adversarial training loops.
- The post-processing guarantee opens the possibility of hybrid pipelines that start with fast non-convex training and finish with the convex step for free robustness gains.
Load-bearing premise
The convex restriction remains a faithful enough surrogate that its global solution improves or at least maintains performance on the original Lipschitz-regularized objective and on robustness metrics.
What would settle it
An experiment on the same regression datasets where the network obtained from the convex program has a higher value of the original non-convex Lipschitz-regularized objective than networks trained by standard methods.
Figures
read the original abstract
In this work, we introduce a training procedure for shallow neural networks that promotes robustness against adversarial attacks. We solve a non-convex Lipschitz-regularized training program by introducing a convex restriction that can be efficiently solved to global optimality. Our approach can be employed as a post-processing step by taking a pre-trained network as an initial solution to then solving the convex program whose optimal network is guaranteed to be no worse than the initial one. We illustrate the improvements of our training procedure with experiments using real world datasets for regression tasks under an adversarial setting. We show numerically that solving our proposed convex program yields networks with lower objective values on the Lipschitz-regularized program compared to existing methods. Additionally, we show that on certain datasets, networks obtained using our convex training program are both more accurate and robust with respect to adversarial attacks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to solve the non-convex Lipschitz-regularized training objective for shallow neural networks via a convex restriction that admits a globally optimal solution. The method can be applied as post-processing to a pre-trained network, with the resulting network guaranteed to be feasible for the original program and no worse in objective value. Numerical experiments on regression datasets are reported to show lower objective values than existing methods and, on certain datasets, improved accuracy and adversarial robustness.
Significance. If the convex restriction is correctly derived as a valid surrogate and the experimental claims hold under standard controls, the work would provide a practical route to globally optimal solutions for a restricted form of the Lipschitz-regularized objective together with a monotonic post-processing guarantee. This combination is a concrete strength for robustness-oriented training of shallow networks.
major comments (2)
- [§3] The manuscript provides no derivation or explicit construction of the convex restriction from the original non-convex Lipschitz-regularized program (mentioned in the abstract and §3). Without this, it is impossible to verify the central claim that the global solution of the restriction remains feasible for the original program and is guaranteed to be no worse than the initializer.
- [Experimental section / Tables] The experimental claims of lower objective values and improved adversarial robustness rest on results whose protocol, baseline implementations, hyper-parameter selection, and statistical variability (error bars or multiple runs) are not described. This directly undermines assessment of the numerical evidence presented for the method's superiority.
minor comments (2)
- [§2] Notation for the Lipschitz constant and the regularization parameter is introduced without a consolidated table of symbols.
- [Abstract] The abstract states improvements 'on certain datasets' without quantifying how many datasets were tested or the selection criterion.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript to improve clarity and completeness.
read point-by-point responses
-
Referee: [§3] The manuscript provides no derivation or explicit construction of the convex restriction from the original non-convex Lipschitz-regularized program (mentioned in the abstract and §3). Without this, it is impossible to verify the central claim that the global solution of the restriction remains feasible for the original program and is guaranteed to be no worse than the initializer.
Authors: We agree that an explicit, step-by-step derivation of the convex restriction is essential for verifying the feasibility and objective guarantees. In the revised manuscript we will expand §3 with the full construction: starting from the original non-convex program, we detail the specific relaxations applied to the weight and bias constraints, prove that any feasible point of the restriction is feasible for the original program, and show that the optimal value of the restriction is at most as large as that of the initializer. This will make the post-processing guarantee directly verifiable. revision: yes
-
Referee: [Experimental section / Tables] The experimental claims of lower objective values and improved adversarial robustness rest on results whose protocol, baseline implementations, hyper-parameter selection, and statistical variability (error bars or multiple runs) are not described. This directly undermines assessment of the numerical evidence presented for the method's superiority.
Authors: We acknowledge that the current experimental description lacks sufficient detail. In the revision we will add a dedicated experimental protocol subsection that specifies: (i) exact baseline implementations and any modifications made to existing code, (ii) the hyper-parameter search ranges and selection criterion, and (iii) results reported as mean ± standard deviation over at least five independent random seeds for every dataset and method. This will allow readers to assess the reliability of the reported improvements. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces a convex restriction of a non-convex Lipschitz-regularized objective for shallow networks and solves it to global optimality as a post-processing step. The central claims rest on numerical comparisons showing lower objective values and improved adversarial robustness on certain datasets. No self-definitional reductions, fitted inputs renamed as predictions, or load-bearing self-citation chains appear in the abstract or described derivation. The guarantee that the convex solution is no worse than the initializer follows directly from the restriction construction without tautological equivalence to the inputs. The approach is self-contained with independent empirical validation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
ApS.MOSEK Optimizer API for Python 11.1.6, 2026
M. ApS.MOSEK Optimizer API for Python 11.1.6, 2026
2026
-
[2]
Avant and K
T. Avant and K. A. Morgansen. On the sensitivity of pose estimation neural networks: Rotation parameterizations, Lipschitz constants, and provable bounds.Automatica, 155:111112, 2023
2023
-
[3]
Y. Bai, T. Gautam, and S. Sojoudi. Efficient global optimization of two-layer ReLU networks: Quadratic-time algorithms and adversarial training.SIAM Journal on Mathematics of Data Science, 5(2):446–474, 2023
2023
-
[4]
L. Chen, P. Wu, K. Chitta, B. Jaeger, A. Geiger, and H. Li. End-to-end autonomous driving: Challenges and frontiers.IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(12):10164–10183, 2024
2024
-
[5]
Y. Chen, Q. Yang, Z. Chen, C. Yan, S. Zeng, and M. Dai. Physics-informed neural networks for building thermal modeling and demand response control.Building and Environment, 234:110149, 2023
2023
-
[6]
Ergen and M
T. Ergen and M. Pilanci. Global optimality beyond two layers: Training deep ReLU networks via convex programs. In International Conference on Machine Learning, pages 2993–
-
[7]
Eykholt, I
K. Eykholt, I. Evtimov, E. Fernandes, B. Li, A. Rahmati, C. Xiao, A. Prakash, T. Kohno, and D. Song. Robust physical-world attacks on deep learning visual classification. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 1625–1634, 2018
2018
-
[8]
Fazlyab, A
M. Fazlyab, A. Robey, H. Hassani, M. Morari, and G. J. Pappas.Efficient and accurate estimation of lipschitz constants for deep neural networks. NeurIPS, 2019
2019
-
[9]
I. J. Goodfellow, J. Shlens, and C. Szegedy. Explaining and harnessing adversarial examples. InInternational Conference on Learning Representations, 2015
2015
-
[10]
Gramlich, P
D. Gramlich, P. Pauli, C. W. Scherer, and C. Ebenbauer. Convolutional neural networks as 2-D systems.Automatica, 187:112876, 2026
2026
-
[11]
Kelly, R
M. Kelly, R. Longjohn, and K. Nottingham. The UCI machine learning repository.https://archive.ics.uci.edu. Accessed: 2026-03-03
2026
-
[12]
L. Li, T. Xie, and B. Li. SoK: Certified robustness for deep neural networks. In023 IEEE Symposium on Security and Privacy (SP), pages 1289–1310, Los Alamitos, CA, USA, May 2023
2023
-
[13]
Madry, A
A. Madry, A. Makelov, L. Schmidt, D. Tsipras, and A. Vladu. Towards deep learning models resistant to adversarial attacks. InInternational Conference on Learning Representations, 2018
2018
-
[14]
Mishkin, A
A. Mishkin, A. Sahiner, and M. Pilanci. Fast convex optimization for two-layer ReLU networks: Equivalent model classes and cone decompositions. InProceedings of the 39th International Conference on Machine Learning, volume 162, pages 15770–15816. PMLR, 17–23 Jul 2022
2022
-
[15]
P. Neal, C. Eric, P. Borja, and E. Jonathan. Distributed optimization and statistical learning via the alternating direction method of multipliers.Foundations and Trends® in Machine learning, 3(1):1–122, 2011
2011
-
[16]
Pauli, A
P. Pauli, A. Koch, J. Berberich, P. Kohler, and F. Allg¨ ower. Training robust neural networks using Lipschitz bounds. IEEE Control Systems Letters, 6:121–126, 2022
2022
-
[17]
Pilanci and T
M. Pilanci and T. Ergen. Neural networks are convex regularizers: exact polynomial-time convex optimization formulations for two-layer networks. InProceedings of the 37th International Conference on Machine Learning, ICML’20. JMLR.org, 2020
2020
-
[18]
L. A. Rastrigin. Systems of extremal control.Nauka, 1974
1974
-
[19]
Robbins and S
H. Robbins and S. Monro. A Stochastic Approximation Method.The Annals of Mathematical Statistics, 22(3):400 – 407, 1951. 9 Table 1 Relative differences of objective values with respect to the baseline method across several datasets, each evaluated over 10 random trials. The relative difference is computed as baseline−(·) baseline wherebaselineis the objec...
1951
-
[20]
P. T. Sivaprasad, F. Mai, T. Vogels, M. Jaggi, and F. Fleuret. Optimizer benchmarking needs to account for hyperparameter tuning. InProceedings of the 37th International Conference on Machine Learning, volume 119, pages 9036–9045, 13–18 Jul 2020
2020
-
[21]
Szegedy, W
C. Szegedy, W. Zaremba, I. Sutskever, J. Bruna, D. Erhan, I. Goodfellow, and R. Fergus. Intriguing properties of neural networks. InInternational Conference on Learning Representations (ICLR), 2014
2014
-
[22]
Venzke and S
A. Venzke and S. Chatzivasileiadis. Verification of neural network behaviour: Formal guarantees for power system applications.IEEE Transactions on Smart Grid, 12(1):383– 397, 2021
2021
-
[23]
Virmaux and K
A. Virmaux and K. Scaman. Lipschitz regularity of deep neural networks: analysis and efficient estimation. InAdvances in Neural Information Processing Systems, volume 31. Curran Associates, Inc., 2018
2018
-
[24]
A. Xue, L. Lindemann, and R. Alur. Chordal sparsity for SDP-based neural network verification.Automatica, 161:111487, 2024. 10
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.