From inverse problems to neural operators: prediction, mechanism, and generalization of data-driven models
Pith reviewed 2026-06-27 17:01 UTC · model grok-4.3
The pith
Models for physical systems generalize only when they can discover underlying mechanisms from parsimonious differential equations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
All modeling strategies can be seen as defining an input-output relation with different assumed model classes. Since data from physical systems comes from solutions to parsimonious differential equations, only those models whose class allows recovery of such equations are capable of mechanism discovery and therefore generalization.
What carries the argument
The assumed model class of the input-output relation, which determines whether the model can identify parsimonious differential equations.
If this is right
- Sparse Identification of Nonlinear Dynamics learns sparse linear combinations of library terms and can therefore recover mechanisms.
- Neural Ordinary Differential Equations construct the governing equation inside a neural network and can therefore recover mechanisms.
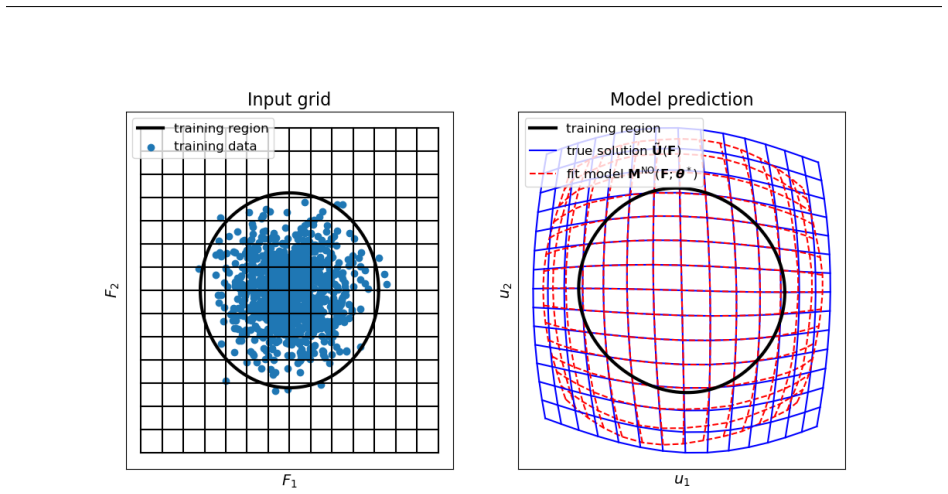
- Neural operators that map inputs directly to outputs without differential equation structure cannot recover mechanisms.
- Only the first two classes will generalize by discovering mechanisms rather than fitting specific input-output pairs.
Where Pith is reading between the lines
- The unification suggests benchmarks should test generalization on systems with known parsimonious equations to separate mechanism models from others.
- It implies that hybrid approaches combining operator learning with differential equation constraints could balance prediction accuracy and mechanism recovery.
- The argument extends naturally to other domains where input-output data is suspected to arise from low-complexity governing rules.
- One could test whether forcing models to output parsimonious equations improves out-of-distribution performance on real sensor data.
Load-bearing premise
Data from physical systems arises from solutions to parsimonious differential equations.
What would settle it
A physical system where a direct neural operator mapping generalizes better than a sparse differential equation model on new inputs, despite the system obeying a parsimonious equation.
Figures














read the original abstract
Scientists have historically relied on mathematical models based on differential equations to relate system inputs -- forces, fluxes, or heat sources -- to outputs, such as displacement, velocity, concentration, and temperature. These models rely on deep domain knowledge to determine the form of the governing differential equation, which is then calibrated with data by solving an inverse problem. In recent years, the field of Scientific Machine Learning has introduced a variety of alternative modeling strategies for physical systems. A method called Sparse Identification of Nonlinear Dynamics learns the governing equation as a sparse linear combination of terms in a user-defined library. Neural Ordinary Differential Equations construct the governing equation by taking in the state and its derivatives at the input layer of a neural network. Entirely foregoing the modeling framework of differential equations, neural operators directly learn a non-linear mapping between the system inputs and outputs. From inverse problems to neural operators, all of these modeling strategies can be conceptualized as data-driven machinery to predict a system's response over a range of inputs. It is then natural to wonder how exactly these various strategies relate to each other, and whether they can be neatly taxonomized. Drawing from the philosophical literature on scientific models, we argue that many model types have a common structure, differing only in the assumed model class of the input-output relation they define. Connecting to philosophical ideas on mechanism, and arguing that data from physical systems arises from solutions to parsimonious differential equations, we propose that only certain models are capable of mechanism discovery, and thus generalization. Our analysis is intended to unite apparently disparate modeling strategies and provide insight into their appropriate use cases.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript offers a conceptual framework for relating different data-driven modeling strategies for physical systems, from traditional inverse problems using differential equations to modern approaches like Sparse Identification of Nonlinear Dynamics (SINDy), Neural ODEs, and neural operators. It argues that these methods differ primarily in the model class they assume for the input-output mapping. Drawing on philosophy of science, particularly ideas on mechanism, and the premise that physical data arises from parsimonious differential equations, the paper proposes that only models capable of discovering such mechanisms will generalize effectively. The analysis aims to unify these strategies and inform their appropriate use.
Significance. If the proposed taxonomy and the link to mechanism discovery hold, this could provide valuable insight into why certain SciML models generalize better, helping practitioners choose models based on their ability to capture underlying mechanisms rather than just fitting data. The conceptual unification is a strength, though the absence of new mathematical results or empirical validation means the significance is primarily in organizing existing ideas rather than advancing technical capabilities.
major comments (2)
- Abstract: The assertion that 'data from physical systems arises from solutions to parsimonious differential equations' is presented as a foundational premise for the claim about mechanism discovery and generalization, yet no supporting argument, references to specific literature in philosophy of science, or illustrative examples from physical systems are provided to establish this as a general property.
- Abstract: The distinction between models capable of 'mechanism discovery' and others is central to the generalization claim, but the manuscript does not provide a precise definition or operational criterion for what constitutes mechanism discovery in the context of these data-driven models, leaving the proposal open to circular reasoning where the premise defines the conclusion.
minor comments (1)
- The abstract mentions specific methods like SINDy and Neural ODEs but does not elaborate on how the taxonomy applies to each; expanding this with concrete mappings in the main body would improve clarity.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's report. We address each major comment point by point below.
read point-by-point responses
-
Referee: Abstract: The assertion that 'data from physical systems arises from solutions to parsimonious differential equations' is presented as a foundational premise for the claim about mechanism discovery and generalization, yet no supporting argument, references to specific literature in philosophy of science, or illustrative examples from physical systems are provided to establish this as a general property.
Authors: We agree that the abstract states this premise without elaboration or citations. The full manuscript draws on the standard view in physics that governing laws take the form of parsimonious differential equations, but we did not supply explicit references or examples in the abstract itself. We will revise the abstract and the opening of the introduction to include targeted citations from the philosophy of science literature on mechanistic explanation (e.g., works by Machamer, Darden, and Craver) together with brief, concrete illustrations such as the heat equation and Newton's second law. revision: yes
-
Referee: Abstract: The distinction between models capable of 'mechanism discovery' and others is central to the generalization claim, but the manuscript does not provide a precise definition or operational criterion for what constitutes mechanism discovery in the context of these data-driven models, leaving the proposal open to circular reasoning where the premise defines the conclusion.
Authors: The manuscript links mechanism discovery to the recovery of an underlying sparse differential-equation structure, informed by philosophical accounts of mechanism. We acknowledge, however, that the abstract does not supply an explicit operational criterion, which could invite the circularity concern raised. In revision we will add a short clarifying paragraph (or subsection) that defines mechanism discovery operationally as the identification of a parsimonious library term or neural representation whose functional form matches the known governing equation of the system, and we will contrast this explicitly with pure input-output approximation that does not recover such structure. revision: yes
Circularity Check
No significant circularity; conceptual argument from external philosophical premise
full rationale
The paper advances a taxonomy of modeling strategies (inverse problems, SINDy, Neural ODEs, neural operators) and a philosophical claim that only mechanism-discovering models generalize because physical data arises from parsimonious DEs. This premise is presented as drawn from the philosophy of science literature rather than derived within the paper or from the models themselves. No equations, fitted parameters, uniqueness theorems, or self-citations are invoked as load-bearing steps whose validity reduces to the target claim by construction. The argument is therefore an interpretive stance whose validity stands or falls on acceptance of the external premise, not on internal self-reference or renaming of results.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Data from physical systems arises from solutions to parsimonious differential equations
Reference graph
Works this paper leans on
-
[1]
Mohannad Zeyad Naser. What is an Engineering Model? Philosophical Arguments and Counterarguments on Why Machine Learning Models Belong in Engineering.European Journal for Philosophy of Science, 16(2):46, 2026
2026
-
[2]
The Ontological Status of Theoretical Entities
Grover Maxwell. The Ontological Status of Theoretical Entities. In Herbert Feigl and Grover Maxwell, editors, Scientific Explanation, Space, and Time: Minnesota Studies in the Philosophy of Science, pages 181–192. University of Minnesota Press, 1962. 31
1962
-
[3]
Peter Machamer, Lindley Darden, and Carl F. Craver. Thinking about Mechanisms.Philosophy of Science, 67(1):1–25, 2000
2000
-
[4]
How Are Models and Explanations Related?Erkenntnis, 81(5):1127–1148, 2016
Yasha Rohwer and Collin Rice. How Are Models and Explanations Related?Erkenntnis, 81(5):1127–1148, 2016
2016
-
[5]
EXPLANATORY UNIFICATION.Philosophy of Science, 1981
Philip Kitcher. EXPLANATORY UNIFICATION.Philosophy of Science, 1981
1981
-
[6]
Laws of Nature and Their Supporting Casts.British Journal for the Philosophy of Science, 77(2):345–371, 2026
Travis McKenna. Laws of Nature and Their Supporting Casts.British Journal for the Philosophy of Science, 77(2):345–371, 2026
2026
-
[7]
New York : Oxford University Press, 2013
Michael Weisberg.Simulation and similarity : using models to understand the world. New York : Oxford University Press, 2013
2013
-
[8]
J. N. Reddy.An Introduction to Continuum Mechanics. Cambridge University Press, Cambridge, 2 edition, 2013
2013
-
[9]
Vallet and B
B. Vallet and B. Lévy. Spectral Geometry Processing with Manifold Harmonics.Computer Graphics Forum, 27(2):251–260, April 2008
2008
-
[10]
Thomas J. R. Hughes. The Finite Element Method, 2000
2000
-
[11]
Conor Rowan, Alireza Doostan, Kurt Maute, and John Evans. Solving Engineering Eigenvalue Problems With Neural Networks Using the Rayleigh Quotient.International Journal for Numerical Methods in Engineering, 126(24):e70209, 2025. _eprint: https://onlinelibrary.wiley.com/doi/pdf/10.1002/nme.70209
-
[12]
Fourier Neural Operator for Parametric Partial Differential Equations, May 2021
Zongyi Li, Nikola Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Fourier Neural Operator for Parametric Partial Differential Equations, May 2021. arXiv:2010.08895 [cs]
Pith/arXiv arXiv 2021
-
[13]
Thorpe, Somdatta Goswami, Krishna Kumar, and Ufuk Topcu
Tyler Ingebrand, Adam J. Thorpe, Somdatta Goswami, Krishna Kumar, and Ufuk Topcu. Basis-to-Basis Operator Learning Using Function Encoders, November 2024. arXiv:2410.00171 [cs]
arXiv 2024
-
[14]
Tapas Tripura and Souvik Chakraborty. Wavelet Neural Operator for solving parametric partial differential equations in computational mechanics problems.Computer Methods in Applied Mechanics and Engineering, 404:115783, February 2023
2023
-
[15]
Lu Lu, Xuhui Meng, Shengze Cai, Zhiping Mao, Somdatta Goswami, Zhongqiang Zhang, and George Em Karniadakis. A comprehensive and fair comparison of two neural operators (with practical extensions) based on FAIR data.Computer Methods in Applied Mechanics and Engineering, 393:114778, April 2022
2022
-
[16]
Willcox and J
K. Willcox and J. Peraire. Balanced Model Reduction via the Proper Orthogonal Decomposition.AIAA Journal, 40(11):2323–2330, November 2002
2002
-
[17]
Ghanem and Pol D
Roger G. Ghanem and Pol D. Spanos.Stochastic Finite Elements: A Spectral Approach. Springer, New York, NY , 1991
1991
-
[18]
Raissi, P
M. Raissi, P. Perdikaris, and G.E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, February 2019. 32
2019
-
[19]
Seidman, Georgios Kissas, Paris Perdikaris, and George J
Jacob H. Seidman, Georgios Kissas, Paris Perdikaris, and George J. Pappas. NOMAD: Nonlinear Manifold Decoders for Operator Learning, June 2022. arXiv:2206.03551 [cs]
arXiv 2022
-
[20]
University of Chicago Press, Chicago, IL, October 2010
Eric Winsberg.Science in the Age of Computer Simulation. University of Chicago Press, Chicago, IL, October 2010
2010
-
[21]
Herfel, Władysław Krajewski, Ilkka Niiniluoto, and Ryszard Wójcicki
William E. Herfel, Władysław Krajewski, Ilkka Niiniluoto, and Ryszard Wójcicki. Theories and Models in Scientific Processes. InTheories and Models in Scientific Processes. Brill, December 2023
2023
-
[22]
Morgan and Margaret Morrison, editors.Models as Mediators: Perspectives on Natural and Social Science
Mary S. Morgan and Margaret Morrison, editors.Models as Mediators: Perspectives on Natural and Social Science. Ideas in Context. Cambridge University Press, Cambridge, 1999
1999
-
[23]
Oxford Studies in Philosophy of Science
Margaret Morrison.Reconstructing Reality: Models, Mathematics, and Simulations. Oxford Studies in Philosophy of Science. Oxford University Press, Oxford, New York, January 2015
2015
-
[24]
McMullin
E. McMullin. What do Physical Models Tell us? 52:385–396, 1968. Book Title: Studies in Logic and the Foundations of Mathematics ISBN: 9780444534163
1968
-
[25]
Machine Learning and Theory Ladenness – A Phenomenological Account, January 2026
Alberto Termine, Emanuele Ratti, and Alessandro Facchini. Machine Learning and Theory Ladenness – A Phenomenological Account, January 2026. arXiv:2409.11277 [cs]
arXiv 2026
-
[26]
Ronald N. Giere. How Models Are Used to Represent Reality.Philosophy of Science, 71(5):742–752, December 2004
2004
-
[27]
Models in Science (2nd edition)
Roman Frigg and Stephan Hartmann. Models in Science (2nd edition). In Edward N. Zalta, editor,The Stanford Encyclopedia of Philosophy. Stanford, 2021
2021
-
[28]
van Fraassen
Bas C. van Fraassen. Imaging, Picturing, and Scaling. In Bas C. van Fraassen, editor,Scientific Representation: Paradoxes of Perspective, page 0. Oxford University Press, August 2008
2008
-
[29]
Elements in the Philosophy of Science
James Nguyen and Roman Frigg.Scientific Representation. Elements in the Philosophy of Science. Cambridge University Press, Cambridge, 2022
2022
-
[30]
Carl F. Craver. When Mechanistic Models Explain.Synthese, 153(3):355–376, 2006
2006
-
[31]
Gabriel Siegel and Carl F. Craver. Phenomenological Laws and Mechanistic Explanations.Philosophy of Science, 91(1):132–150, January 2024
2024
-
[32]
Mark Povich and Carl F. Craver. Mechanistic Levels, Reduction, and Emergence. In Stuart Glennan and Phyllis Illari, editors,The Routledge Handbook of Mechanisms and Mechanical Philosophy, pages 185–97. Routledge, 2017
2017
-
[33]
Mechanisms in practice: A methodological approach.Journal of Evaluation in Clinical Practice, 24(5):1177–1183, October 2018
Stavros Ioannidis and Stathis Psillos. Mechanisms in practice: A methodological approach.Journal of Evaluation in Clinical Practice, 24(5):1177–1183, October 2018
2018
-
[34]
An Inferential Conception of Scientific Representation.Philosophy of Science, 71(5):767–779, December 2004
Mauricio Suárez. An Inferential Conception of Scientific Representation.Philosophy of Science, 71(5):767–779, December 2004. 33
2004
-
[35]
An Inferential Conception of the Application of Mathematics.Noûs, 45(2):345– 374, 2011
Otávio Bueno and Mark Colyvan. An Inferential Conception of the Application of Mathematics.Noûs, 45(2):345– 374, 2011
2011
-
[36]
Scientific Representation: An Inferentialist-Expressivist Manifesto.Philosophical Topics, 50(1):263–291, 2022
Kareem Khalifa, Jared Millson, and Mark Risjord. Scientific Representation: An Inferentialist-Expressivist Manifesto.Philosophical Topics, 50(1):263–291, 2022
2022
-
[37]
What is a Mechanism? A Counterfactual Account.Philosophy of Science, 69(S3):366–377, 2002
James Woodward. What is a Mechanism? A Counterfactual Account.Philosophy of Science, 69(S3):366–377, 2002
2002
-
[38]
A penalized Allen-Cahn equation for the mean curvature flow of thin structures, May 2024
Elie Bretin, Chih-Kang Huang, and Simon Masnou. A penalized Allen-Cahn equation for the mean curvature flow of thin structures, May 2024. arXiv:2310.10272 [math]
Pith/arXiv arXiv 2024
-
[39]
J. H. Irving and John G. Kirkwood. The Statistical Mechanical Theory of Transport Processes. IV. The Equations of Hydrodynamics.Journal of Chemical Physics, 18:817–829, June 1950. ADS Bibcode: 1950JChPh..18..817I
1950
-
[40]
Brunton, Joshua L
Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz. Discovering governing equations from data by sparse identification of nonlinear dynamical systems.Proceedings of the National Academy of Sciences, 113(15):3932– 3937, April 2016
2016
-
[41]
Daniel A. Messenger and David M. Bortz. Weak SINDy For Partial Differential Equations.Journal of Computa- tional Physics, 443:110525, October 2021. arXiv:2007.02848 [math]
arXiv 2021
-
[42]
AI Feynman: a Physics-Inspired Method for Symbolic Regression, April 2020
Silviu-Marian Udrescu and Max Tegmark. AI Feynman: a Physics-Inspired Method for Symbolic Regression, April 2020. arXiv:1905.11481 [physics]
arXiv 2020
-
[43]
Interpretable Machine Learning for Science with PySR and SymbolicRegression.jl, May 2023
Miles Cranmer. Interpretable Machine Learning for Science with PySR and SymbolicRegression.jl, May 2023. arXiv:2305.01582 [astro-ph]
Pith/arXiv arXiv 2023
-
[44]
The Unreasonable Effectiveness of Mathematics in the Natural Sciences.Communications on Pure and Applied Mathematics, 1960
Eugene Wigner. The Unreasonable Effectiveness of Mathematics in the Natural Sciences.Communications on Pure and Applied Mathematics, 1960
1960
-
[45]
Arguments Concerning Scientific Realism
Bas Van Fraassen. Arguments Concerning Scientific Realism. In Martin Curd and Jan A. Cover, editors, Philosophy of Science: The Central Issues. Norton, 1998
1998
-
[46]
Shea, Steven L
Daniel E. Shea, Steven L. Brunton, and J. Nathan Kutz. SINDy-BVP: Sparse identification of nonlinear dynamics for boundary value problems.Physical Review Research, 3(2):023255, June 2021
2021
-
[47]
Understanding deep learning requires rethinking generalization, February 2017
Chiyuan Zhang, Samy Bengio, Moritz Hardt, Benjamin Recht, and Oriol Vinyals. Understanding deep learning requires rethinking generalization, February 2017. arXiv:1611.03530 [cs]
Pith/arXiv arXiv 2017
-
[48]
Ronny Huang, Zeyad Emam, Micah Goldblum, Liam Fowl, J
W. Ronny Huang, Zeyad Emam, Micah Goldblum, Liam Fowl, J. K. Terry, Furong Huang, and Tom Goldstein. Understanding Generalization through Visualizations, November 2020. arXiv:1906.03291 [cs]
arXiv 2020
-
[49]
Reconciling modern machine-learning practice and the classical bias–variance trade-off.Proceedings of the National Academy of Sciences, 116(32):15849–15854, August 2019
Mikhail Belkin, Daniel Hsu, Siyuan Ma, and Soumik Mandal. Reconciling modern machine-learning practice and the classical bias–variance trade-off.Proceedings of the National Academy of Sciences, 116(32):15849–15854, August 2019. 34
2019
-
[50]
Hauber, Marcus Rosenblatt, Christian Tönsing, and Jens Timmer
Franz-Georg Wieland, Adrian L. Hauber, Marcus Rosenblatt, Christian Tönsing, and Jens Timmer. On structural and practical identifiability.Current Opinion in Systems Biology, 25:60–69, March 2021
2021
-
[51]
Oliver J. Maclaren and Ruanui Nicholson. What can be estimated? Identifiability, estimability, causal inference and ill-posed inverse problems, July 2020. arXiv:1904.02826 [math]
arXiv 2020
-
[52]
Bourdin, G
B. Bourdin, G. A. Francfort, and J-J. Marigo. Numerical experiments in revisited brittle fracture.Journal of the Mechanics and Physics of Solids, 48(4):797–826, April 2000
2000
-
[53]
Carl F. Craver. The Ontic Account of Scientific Explanation. In Marie I. Kaiser, Oliver R. Scholz, Daniel Plenge, and Andreas Hüttemann, editors,Explanation in the special science: The case of biology and history, pages 27–52. Springer, 2014
2014
-
[54]
Rethinking Mechanistic Explanation.Philosophy of Science, 69(S3):342–353, 2002
Stuart Glennan. Rethinking Mechanistic Explanation.Philosophy of Science, 69(S3):342–353, 2002
2002
-
[55]
Explanation: a mechanist alternative.Studies in History and Philosophy of Biological and Biomedical Sciences, 36(2):421–441, June 2005
William Bechtel and Adele Abrahamsen. Explanation: a mechanist alternative.Studies in History and Philosophy of Biological and Biomedical Sciences, 36(2):421–441, June 2005
2005
-
[56]
Wesley Salmon?s Process Theory of Causality and the Conserved Quantity Theory.Philosophy of Science, 59(2):195–216, 1992
Phil Dowe. Wesley Salmon?s Process Theory of Causality and the Conserved Quantity Theory.Philosophy of Science, 59(2):195–216, 1992
1992
-
[57]
On the Statistical Calibration of Physical Models.International Journal of Chemical Kinetics, 2015
Khachik Sargsyan, Roger Ghanem, and HN Najm. On the Statistical Calibration of Physical Models.International Journal of Chemical Kinetics, 2015
2015
-
[58]
Extending the explicit constraint force method to inverse problems, December 2025
Conor Rowan. Extending the explicit constraint force method to inverse problems, December 2025. arXiv:2512.14877 [math]
arXiv 2025
-
[59]
Samuel H. Rudy, Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz. Data-driven discovery of partial differential equations, September 2016. arXiv:1609.06401 [nlin]
Pith/arXiv arXiv 2016
-
[60]
Compressed Sensing
DL Donoho. Compressed Sensing. 52:1289–1306, April 2006
2006
-
[61]
Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, and David Duvenaud. Neural Ordinary Differential Equations, December 2019. arXiv:1806.07366 [cs]
Pith/arXiv arXiv 2019
-
[62]
Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions, October 2024
Cong Wang, Aoming Liang, Fei Han, Xinyu Zeng, Zhibin Li, Dixia Fan, and Jens Kober. Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions, October 2024. arXiv:2410.00490 [cs]
arXiv 2024
-
[63]
Farshud Sorourifar, You Peng, Ivan Castillo, Linh Bui, Juan Venegas, and Joel A. Paulson. Physics-Enhanced Neural Ordinary Differential Equations: Application to Industrial Chemical Reaction Systems.Industrial & Engineering Chemistry Research, 62(38):15563–15577, September 2023
2023
-
[64]
Lu Lu, Pengzhan Jin, and George Em Karniadakis. DeepONet: Learning nonlinear operators for identifying differential equations based on the universal approximation theorem of operators.Nature Machine Intelligence, 3(3):218–229, March 2021. arXiv:1910.03193 [cs]
Pith/arXiv arXiv 2021
-
[65]
LNO: Laplace Neural Operator for Solving Differential Equations, May 2023
Qianying Cao, Somdatta Goswami, and George Em Karniadakis. LNO: Laplace Neural Operator for Solving Differential Equations, May 2023. arXiv:2303.10528 [cs]. 35
arXiv 2023
-
[66]
Wenrui Hao and Jindong Wang. Laplacian Eigenfunction-Based Neural Operator for Learning Nonlinear Partial Differential Equations, February 2025. arXiv:2502.05571 [math-ph]
arXiv 2025
-
[67]
Operator learning with PCA-Net: upper and lower complexity bounds, October 2023
Samuel Lanthaler. Operator learning with PCA-Net: upper and lower complexity bounds, October 2023. arXiv:2303.16317 [cs]
arXiv 2023
-
[68]
Zecheng Zhang, Hao Liu, Guosheng Fu, Hayden Schaeffer, and Guang Lin. Finite Element Representation Network (FERN) for Operator Learning with a Localized Trainable Basis, October 2025. arXiv:2510.26962 [math]
arXiv 2025
-
[69]
An overview of operator learning, October 2024
2024
-
[70]
Diaz, Ivan Zanardi, Se- ung Whan Chung, Dylan Matthew Copeland, Coleman Kendrick, William Anderson, Traian Iliescu, and Matthias Heinkenschloss
Youngsoo Choi, Siu Wun Cheung, Youngkyu Kim, Ping-Hsuan Tsai, Alejandro N. Diaz, Ivan Zanardi, Se- ung Whan Chung, Dylan Matthew Copeland, Coleman Kendrick, William Anderson, Traian Iliescu, and Matthias Heinkenschloss. Defining Foundation Models for Computational Science: A Call for Clarity and Rigor, May
-
[71]
arXiv:2505.22904 [cs.LG]
-
[72]
Diffusion Demonstration, March 2021
Emma Vanstone. Diffusion Demonstration, March 2021. 36
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.