Inertial effects on the mechanical efficiency of a semi-passive oscillating hydrofoil energy harvester
Pith reviewed 2026-06-27 11:38 UTC · model grok-4.3
The pith
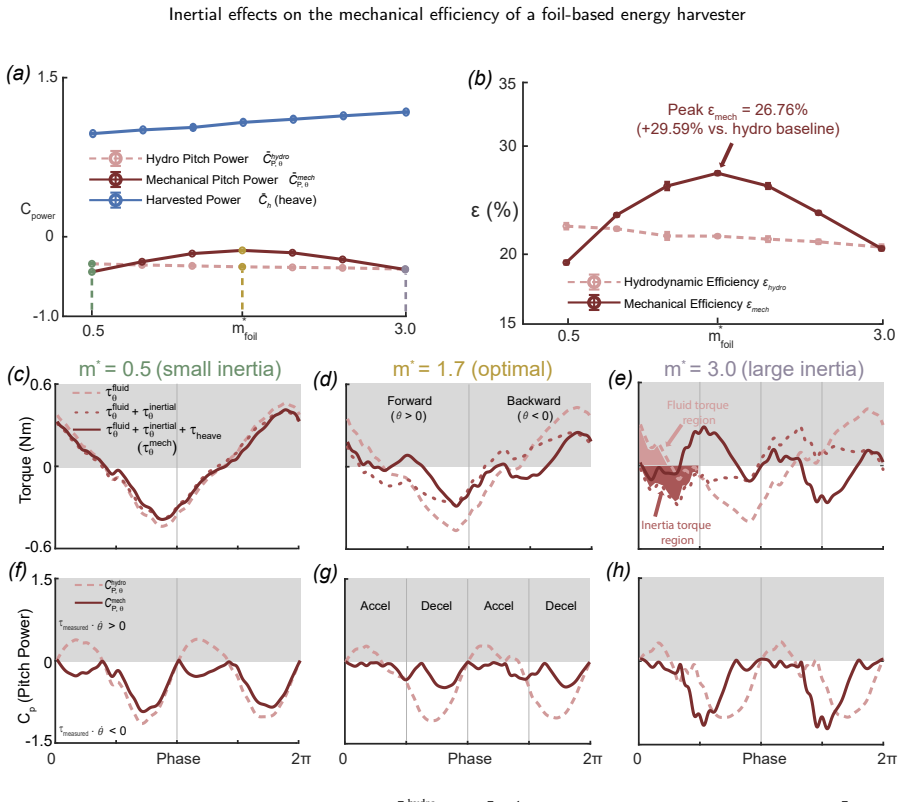
Rotational inertia redistributes actuator torque in oscillating hydrofoils, enabling mechanical efficiency to reach 33.96 percent when mass ratio, pitching axis, and reduced frequency align properly.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
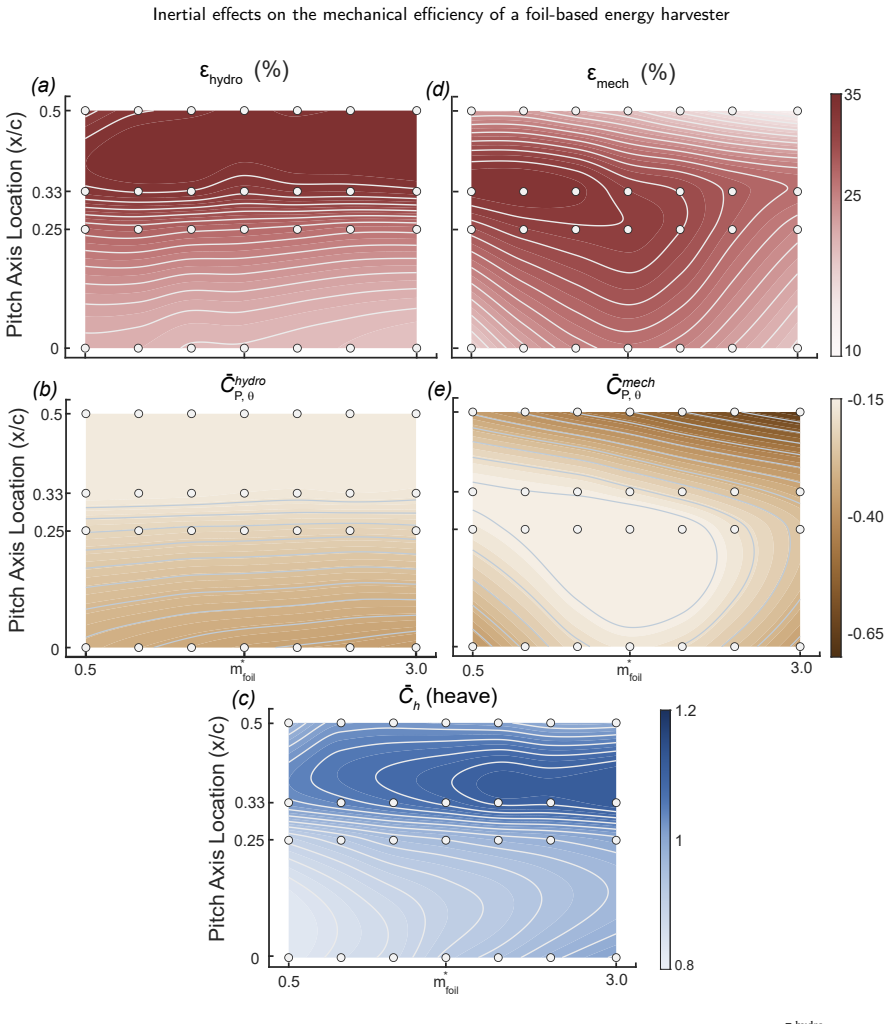
Rotational inertia redistributes actuator demand through phase-dependent torque exchange, while heave-pitch coupling can partially cancel this demand when favorably phased. Pitching-axis location modifies the phase and direction of the fluid torque through changes in the effective hydrodynamic moment arm. Reduced frequency governs the balance between enhanced unsteady loading and inertia-amplified actuator demand. Optimal performance is achieved within reduced frequency region of 0.125-0.16 using quarter-chord to one-third-chord pitching axes and relatively low foil mass ratios from about 0.5 to 2.0, yielding a peak mechanical efficiency of 33.96 percent, which can diverge from the hydrodyna
What carries the argument
Phase-dependent torque exchange driven by rotational inertia and heave-pitch coupling, which is quantified through torque-loop analysis to show net actuator demand reduction.
If this is right
- Mechanical efficiency can diverge from hydrodynamic efficiency by up to 38 percent depending on the chosen mass ratio and pitching axis.
- Performance peaks when reduced frequency lies between 0.125 and 0.16.
- Pitching axes located between the quarter-chord and one-third-chord positions improve torque cancellation.
- Lower foil mass ratios (0.5 to 2.0) minimize inertia-amplified actuator demand while retaining fluid loading benefits.
- Synchronization between inertial torque loops and hydrodynamic forces is required to realize the efficiency gains.
Where Pith is reading between the lines
- Device designers must measure actuator power directly rather than relying on fluid-only metrics when scaling to field conditions.
- The same inertia-tuning logic could be tested on airfoils in wind-energy oscillating devices to check for comparable efficiency shifts.
- Active control that adjusts instantaneous frequency or mass distribution might extend the optimal window beyond the static configurations tested.
- PIV-based flow measurements could be repeated at higher Reynolds numbers to test whether the reported synchronization persists outside laboratory scales.
Load-bearing premise
Laboratory measurements of actuator torque and hydrodynamic forces accurately represent net mechanical energy balance without significant unaccounted mechanical losses, scaling artifacts, or differences from field operating conditions.
What would settle it
Direct comparison of actuator power input and extracted power in a controlled field test under realistic flow conditions that produces mechanical efficiency values differing substantially from the reported 33.96 percent.
Figures




read the original abstract
Oscillating-foil-based energy harvesters have demonstrated strong potential for low-speed hydrokinetic energy extraction; however, the actuator-level mechanical energy balance associated with prescribed pitching motion remains poorly understood. The present work experimentally characterizes how foil mass ratio, pitching-axis location, and reduced frequency jointly govern the hydrodynamic and mechanical efficiencies of a semi-passive oscillating hydrofoil. Results show that rotational inertia redistributes actuator demand through phase-dependent torque exchange, while heave-pitch coupling can partially cancel this demand when favorably phased. Pitching-axis location modifies the phase and direction of the fluid torque through changes in the effective hydrodynamic moment arm. Reduced frequency governs the balance between enhanced unsteady loading and inertia-amplified actuator demand. Optimal performance is achieved within reduced frequency region of 0.125-0.16 using quarter-chord to one-third-chord pitching axes and relatively low foil mass ratios from about 0.5 to 2.0, yielding a peak mechanical efficiency of 33.96% -- which can diverge from the hydrodynamic efficiency by approximately 38.16% depending on configuration. Torque-loop analysis and PIV measurements show that this synchronization is a key mechanism governing the observed efficiency trends.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript experimentally characterizes the joint effects of foil mass ratio, pitching-axis location, and reduced frequency on the hydrodynamic and mechanical efficiencies of a semi-passive oscillating hydrofoil energy harvester. It reports that rotational inertia redistributes actuator demand via phase-dependent torque exchange, heave-pitch coupling can cancel demand when phased favorably, and optimal performance occurs for reduced frequencies 0.125-0.16, quarter- to one-third-chord pitching axes, and mass ratios ~0.5-2.0, with a peak mechanical efficiency of 33.96% that can diverge from hydrodynamic efficiency by up to 38.16%. Torque-loop analysis and PIV measurements identify synchronization as the governing mechanism.
Significance. If the actuator torque measurements accurately capture net mechanical power, the results would provide useful quantitative guidance on inertial effects and efficiency divergence for hydrokinetic harvester design, an area where actuator-level energy balance has been under-studied. The experimental combination of efficiency data with PIV and torque-loop analysis is a strength for identifying mechanisms.
major comments (2)
- [Abstract] Abstract: The headline quantitative results (peak mechanical efficiency 33.96%, divergence up to 38.16%, optimal band 0.125-0.16) are extracted directly from actuator torque and force data, yet no error bars, sample sizes, data exclusion criteria, or calibration/validation details for the torque measurements are stated. This is load-bearing for the central claim that mechanical efficiency can diverge from hydrodynamic efficiency by ~38% and that the reported optima are reliable.
- [Abstract] Abstract (torque-loop analysis paragraph): The claim that rotational inertia redistributes actuator demand through phase-dependent torque exchange and that heave-pitch coupling can cancel demand rests on the unverified assumption that measured actuator torque equals net mechanical power delivered to the fluid after all inertial, frictional, and coupling effects. No independent check (e.g., comparison against known losses, sensor calibration offsets, or rig friction measurements) is described, which directly affects the reported efficiency values and the synchronization mechanism interpretation.
minor comments (1)
- [Abstract] The abstract states specific numerical optima without referencing the corresponding figures or tables that contain the underlying data; adding such cross-references would improve traceability.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback, which highlights important aspects of experimental rigor. The concerns about uncertainty reporting and torque validation are well-taken, and we will revise the manuscript to address them directly while preserving the core findings on inertial effects and efficiency divergence.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline quantitative results (peak mechanical efficiency 33.96%, divergence up to 38.16%, optimal band 0.125-0.16) are extracted directly from actuator torque and force data, yet no error bars, sample sizes, data exclusion criteria, or calibration/validation details for the torque measurements are stated. This is load-bearing for the central claim that mechanical efficiency can diverge from hydrodynamic efficiency by ~38% and that the reported optima are reliable.
Authors: We agree that explicit uncertainty quantification strengthens the claims. In the revised manuscript, we will add error bars derived from repeated trials to the headline efficiency values in the abstract and results, report sample sizes (typically five repeats per configuration), specify data exclusion criteria based on torque signal quality thresholds, and include a methods subsection on torque sensor calibration (using a certified reference torque) and validation against known static loads. These additions will support the reported 33.96% peak and the ~38% divergence without altering the quantitative results. revision: yes
-
Referee: [Abstract] Abstract (torque-loop analysis paragraph): The claim that rotational inertia redistributes actuator demand through phase-dependent torque exchange and that heave-pitch coupling can cancel demand rests on the unverified assumption that measured actuator torque equals net mechanical power delivered to the fluid after all inertial, frictional, and coupling effects. No independent check (e.g., comparison against known losses, sensor calibration offsets, or rig friction measurements) is described, which directly affects the reported efficiency values and the synchronization mechanism interpretation.
Authors: The original experiments included static friction characterization of the rig and sensor offset corrections, but these were not described in sufficient detail. The revision will expand the methods to document: (i) torque sensor calibration procedure and offset determination, (ii) no-flow rig friction measurements used to subtract parasitic losses, and (iii) an independent cross-check comparing integrated actuator power against hydrodynamic power estimated from simultaneous force and PIV data in a reference case. This will explicitly justify the net mechanical power interpretation underlying the torque-loop analysis and synchronization mechanism. revision: yes
Circularity Check
No circularity: experimental measurements with no derivation chain
full rationale
The paper is a purely experimental study that reports measured hydrodynamic and mechanical efficiencies from laboratory actuator torque, force, and PIV data. No equations, derivations, fitted parameters presented as predictions, or self-citation chains appear in the abstract or description. Optimal performance figures (e.g., 33.96% peak efficiency) are direct experimental outcomes, not reductions by construction to the paper's own inputs. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (3)
- foil mass ratio
- pitching-axis location
- reduced frequency
axioms (1)
- domain assumption Laboratory semi-passive motion and torque measurements represent net mechanical energy balance of field-scale harvesters.
Reference graph
Works this paper leans on
-
[1]
Numerical analysis of an oscillating-wing wind and hydropower generator
Ashraf, M., Young, J., Lai, J., Platzer, M., 2011. Numerical analysis of an oscillating-wing wind and hydropower generator. AIAA journal 49, 1374–1386
2011
-
[2]
Effects of non-sinusoidal motion and effective angle of attack on energy extraction performance of a fully-activated flapping foil
Boudis, A., Oualli, H., Benzaoui, A., Guerri, O., Bayeul-Lainé, C., Coutier-Delgosha, O., 2021. Effects of non-sinusoidal motion and effective angle of attack on energy extraction performance of a fully-activated flapping foil. Journal of Applied Fluid Mechanics 14, 485–498
2021
-
[3]
Experimental investigation of the energy extraction by a fully-passive flapping-foil hydrokinetic turbine prototype
Boudreau, M., Dumas, G., Rahimpour, M., Oshkai, P., 2018. Experimental investigation of the energy extraction by a fully-passive flapping-foil hydrokinetic turbine prototype. Journal of Fluids and Structures 82, 446–472
2018
-
[4]
A parametric study and optimization of the fully-passive flapping-foil turbine at high reynolds number
Boudreau, M., Picard-Deland, M., Dumas, G., 2020. A parametric study and optimization of the fully-passive flapping-foil turbine at high reynolds number. Renewable Energy 146, 1958–1975
2020
-
[5]
Effect of aspect ratio on the energy extraction efficiency of three-dimensional flapping foils
Deng, J., Caulfield, C., Shao, X., 2014. Effect of aspect ratio on the energy extraction efficiency of three-dimensional flapping foils. Physics of Fluids 26
2014
-
[6]
Inertial effects of the semi-passive flapping foil on its energy extraction efficiency
Deng, J., Teng, L., Pan, D., Shao, X., 2015. Inertial effects of the semi-passive flapping foil on its energy extraction efficiency. Physics of Fluids 27
2015
-
[7]
Experimental investigation of the dynamic behaviour of a fully passive flapping foil hydrokinetic turbine
Duarte, L., Dellinger, N., Dellinger, G., Ghenaim, A., Terfous, A., 2019. Experimental investigation of the dynamic behaviour of a fully passive flapping foil hydrokinetic turbine. Journal of Fluids and Structures 88, 1–12
2019
-
[8]
Experimental optimisation of the pitching structural parameters of a fully passive flapping foil turbine
Duarte, L., Dellinger, N., Dellinger, G., Ghenaim, A., Terfous, A., 2021. Experimental optimisation of the pitching structural parameters of a fully passive flapping foil turbine. Renewable Energy 171, 1436–1444. Z.Zihan et al.:Preprint submitted to ElsevierPage 20 of 22 Inertial effects on the mechanical efficiency of a foil-based energy harvester
2021
-
[9]
Optimal kinematics for energy harvesting using favourable wake–foil interactions in tandem oscillating hydrofoils
Handy-Cardenas, E.E., Zhu, Y., Breuer, K.S., 2025. Optimal kinematics for energy harvesting using favourable wake–foil interactions in tandem oscillating hydrofoils. Journal of Fluid Mechanics 1012, A23
2025
-
[10]
Aninvestigationofthefluid-structureinteractioninanoscillating-wingmicro-hydropowergenerator
Jones,K.D.,Lindsey,K.,Platzer,M.,2003. Aninvestigationofthefluid-structureinteractioninanoscillating-wingmicro-hydropowergenerator
2003
-
[11]
Effect of side-walls on flapping-wing power-generation: An experimental study
Karakas, F., Fenercioglu, I., 2016. Effect of side-walls on flapping-wing power-generation: An experimental study. Journal of Applied Fluid Mechanics 9, 2769–2779
2016
-
[12]
Energy harvesting performance and flow structure of an oscillating hydrofoil with finite span
Kim, D., Strom, B., Mandre, S., Breuer, K., 2017. Energy harvesting performance and flow structure of an oscillating hydrofoil with finite span. Journal of Fluids and Structures 70, 314–326
2017
-
[13]
Parametric study of an oscillating airfoil in a power-extraction regime
Kinsey, T., Dumas, G., 2008. Parametric study of an oscillating airfoil in a power-extraction regime. AIAA journal 46, 1318–1330
2008
-
[14]
Prototype testing of a hydrokinetic turbine based on oscillating hydrofoils
Kinsey, T., Dumas, G., Lalande, G., Ruel, J., Mehut, A., Viarouge, P., Lemay, J., Jean, Y., 2011. Prototype testing of a hydrokinetic turbine based on oscillating hydrofoils. Renewable energy 36, 1710–1718
2011
-
[15]
Virtual damper–spring system for viv experiments and hydrokinetic energy conversion
Lee, J., Xiros, N., Bernitsas, M., 2011. Virtual damper–spring system for viv experiments and hydrokinetic energy conversion. Ocean Engineering 38, 732–747
2011
-
[16]
Nonsinusoidal motion effects on energy extraction performance of a flapping foil
Lu, K., Xie, Y., Zhang, D., 2014. Nonsinusoidal motion effects on energy extraction performance of a flapping foil. Renewable energy 64, 283–293
2014
-
[17]
Effect of pivot location and passive heave on propulsion from a pitching airfoil
Mackowski, A., Williamson, C., 2017. Effect of pivot location and passive heave on propulsion from a pitching airfoil. Physical Review Fluids 2, 013101
2017
-
[18]
Developing a cyber-physical fluid dynamics facility for fluid–structure interaction studies
Mackowski, A.W., Williamson, C.H., 2011. Developing a cyber-physical fluid dynamics facility for fluid–structure interaction studies. Journal of Fluids and Structures 27, 748–757
2011
-
[19]
Wingmill: an oscillating-wing windmill
McKinney, W., DeLaurier, J., 1981. Wingmill: an oscillating-wing windmill. Journal of energy 5, 109–115
1981
-
[20]
Large amplitude flow-induced oscillations and energy harvesting using a cyber-physical pitching plate
Onoue, K., Song, A., Strom, B., Breuer, K.S., 2015. Large amplitude flow-induced oscillations and energy harvesting using a cyber-physical pitching plate. Journal of Fluids and Structures 55, 262–275
2015
-
[21]
Reliabilitystudyofafully-passiveoscillatingfoilturbineoperatinginaperiodically-perturbed inflow
Oshkai,P.,Iverson,D.,Lee,W.,Dumas,G.,2022. Reliabilitystudyofafully-passiveoscillatingfoilturbineoperatinginaperiodically-perturbed inflow. Journal of Fluids and Structures 113, 103630
2022
-
[22]
Development of a new oscillating-wing wind and hydropower generator, in: 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, p
Platzer, M., Ashraf, M., Young, J., Lai, J., 2009. Development of a new oscillating-wing wind and hydropower generator, in: 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, p. 1211
2009
-
[23]
An experimental investigation of a passively flapping foil in energy harvesting mode
Qadri, M.M., Shahzad, A., Zhao, F., Tang, H., et al., 2019. An experimental investigation of a passively flapping foil in energy harvesting mode. Journal of Applied Fluid Mechanics 12, 1547–1561
2019
-
[24]
Fluid-structure interaction of a fully passive flapping foil for flow energy extraction
Qadri, M.M., Zhao, F., Tang, H., 2020. Fluid-structure interaction of a fully passive flapping foil for flow energy extraction. International Journal of Mechanical Sciences 177, 105587
2020
-
[25]
Prediction of energy harvesting efficiency through a wake–foil interaction model for oscillating foil arrays
Ribeiro, B.L.R., Franck, J.A., 2024. Prediction of energy harvesting efficiency through a wake–foil interaction model for oscillating foil arrays. Journal of Fluid Mechanics 996, A46
2024
-
[26]
Vortex dynamics and reynolds number effects of an oscillating hydrofoil in energy harvesting mode
Ribeiro, B.L.R., Frank, S.L., Franck, J.A., 2020. Vortex dynamics and reynolds number effects of an oscillating hydrofoil in energy harvesting mode. Journal of Fluids and Structures 94, 102888
2020
-
[27]
Wake-foil interactions and energy harvesting efficiency in tandem oscillating foils
Ribeiro, B.L.R., Su, Y., Guillaumin, Q., Breuer, K.S., Franck, J.A., 2021. Wake-foil interactions and energy harvesting efficiency in tandem oscillating foils. Physical Review Fluids 6, 074703
2021
-
[28]
Experimental study of inertia-based passive flexibility of a heaving and pitching airfoil operating in the energy harvesting regime
Siala, F.F., Kamrani Fard, K., Liburdy, J.A., 2020. Experimental study of inertia-based passive flexibility of a heaving and pitching airfoil operating in the energy harvesting regime. Physics of Fluids 32. Z.Zihan et al.:Preprint submitted to ElsevierPage 21 of 22 Inertial effects on the mechanical efficiency of a foil-based energy harvester
2020
-
[29]
Simulations of Hydrofoil Arrays with Applications in Energy Harvesting
Simeski, F., 2017. Simulations of Hydrofoil Arrays with Applications in Energy Harvesting. Ph.D. thesis. Bachelor’s thesis, Brown University
2017
-
[30]
Experiments in direct energy extraction through flapping foils, in: ISOPE International Ocean and Polar Engineering Conference, ISOPE
Simpson, B.J., Hover, F.S., Triantafyllou, M.S., 2008. Experiments in direct energy extraction through flapping foils, in: ISOPE International Ocean and Polar Engineering Conference, ISOPE. pp. ISOPE–I
2008
-
[31]
Developing a four-axis cyber-physical traverse system for highly dynamic experimental fluid mechanics studies
Sorensen, A., 2024. Developing a four-axis cyber-physical traverse system for highly dynamic experimental fluid mechanics studies. Master’s thesis. Iowa State University
2024
-
[32]
Resonant response and optimal energy harvesting of an elastically mounted pitching and heaving hydrofoil
Su, Y., Breuer, K., 2019. Resonant response and optimal energy harvesting of an elastically mounted pitching and heaving hydrofoil. Physical Review Fluids 4, 064701
2019
-
[33]
Confinement effects on energy harvesting by a heaving and pitching hydrofoil
Su, Y., Miller, M., Mandre, S., Breuer, K., 2019. Confinement effects on energy harvesting by a heaving and pitching hydrofoil. Journal of Fluids and Structures 84, 233–242
2019
-
[34]
Effects of non-sinusoidal pitching motion on energy extraction performance of a semi-active flapping foil
Teng, L., Deng, J., Pan, D., Shao, X., 2016. Effects of non-sinusoidal pitching motion on energy extraction performance of a semi-active flapping foil. Renewable energy 85, 810–818
2016
-
[35]
Numerical optimization of a fully-passive flapping-airfoil turbine
Veilleux, J.C., Dumas, G., 2017. Numerical optimization of a fully-passive flapping-airfoil turbine. Journal of Fluids and Structures 70, 102–130
2017
-
[36]
Pivot location and mass ratio effects on flow-induced vibration of a fully passive flapping foil
Wang, Z., Du, L., Zhao, J., Thompson, M.C., Sun, X., 2021. Pivot location and mass ratio effects on flow-induced vibration of a fully passive flapping foil. Journal of Fluids and Structures 100, 103170
2021
-
[37]
How motion trajectory affects energy extraction performance of a biomimic energy generator with an oscillating foil? Renewable energy 37, 61–75
Xiao, Q., Liao, W., Yang, S., Peng, Y., 2012. How motion trajectory affects energy extraction performance of a biomimic energy generator with an oscillating foil? Renewable energy 37, 61–75
2012
-
[38]
A review on flow energy harvesters based on flapping foils
Xiao, Q., Zhu, Q., 2014. A review on flow energy harvesters based on flapping foils. Journal of fluids and structures 46, 174–191
2014
-
[39]
Numerical simulation of fully passive flapping foil power generation
Young, J., Ashraf, M.A., Lai, J.C., Platzer, M.F., 2013. Numerical simulation of fully passive flapping foil power generation. AIAA journal 51, 2727–2739
2013
-
[40]
Flow-energy harvesting using a fully passive flapping foil: A guideline on design and operation
Zhao, F., Qadri, M.M., Wang, Z., Tang, H., 2021. Flow-energy harvesting using a fully passive flapping foil: A guideline on design and operation. International Journal of Mechanical Sciences 197, 106323
2021
-
[41]
Improve the performance of a semi-active flapping airfoil power generator by adjusting both offsetting mass center displacement and changing pitching axis position
Zhu, J., Zhu, M., Zhang, T., 2021a. Improve the performance of a semi-active flapping airfoil power generator by adjusting both offsetting mass center displacement and changing pitching axis position. Energy Reports 7, 5074–5085
-
[42]
Optimal frequency for flow energy harvesting of a flapping foil
Zhu, Q., 2011. Optimal frequency for flow energy harvesting of a flapping foil. Journal of fluid mechanics 675, 495–517
2011
-
[43]
Nonlinear fluid damping of elastically mounted pitching wings in quiescent water
Zhu, Y., Mathai, V., Breuer, K., 2021b. Nonlinear fluid damping of elastically mounted pitching wings in quiescent water. Journal of Fluid Mechanics 923, R2
-
[44]
Nonlinear flow-induced instability of an elastically mounted pitching wing
Zhu, Y., Su, Y., Breuer, K., 2020. Nonlinear flow-induced instability of an elastically mounted pitching wing. Journal of Fluid Mechanics 899, A35. CRediT authorship contribution statement Zihan Zhang:Conceptualization of this study, Methodology, Software.Qimin Feng:Methodology–PIV Experiments.Yuanhang Zhu:Writing - Original draft preparation.Qiang Zhong:...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.