Self-triggered stabilizing controllers for linear continuous-time systems
Pith reviewed 2026-05-25 10:12 UTC · model grok-4.3
The pith
Self-triggered controllers predict update times for linear systems via a pseudo-Lyapunov function to reduce communications while preserving stability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
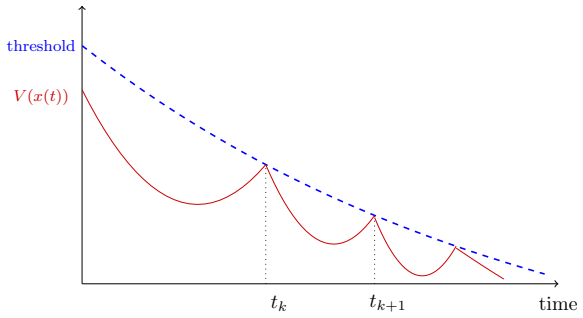
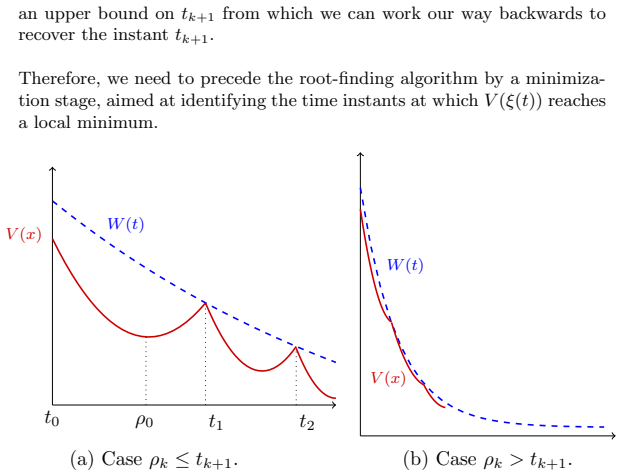
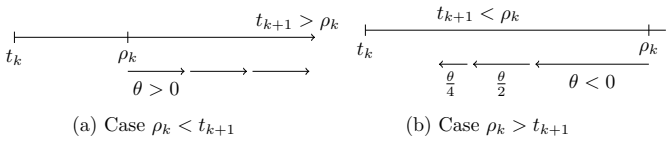
A self-triggered version of an event-triggered controller is presented in which events occur when a pseudo-Lyapunov function increases to a given limit; the future intersection times are computed by a root-finding procedure that combines the global convergence of bisection with the rapid convergence of Newton-Raphson, the initial iterate being obtained through a minimization step, thereby reducing intercommunications while guaranteeing stability.
What carries the argument
The pseudo-Lyapunov function (PLF) whose crossings with an upper bound trigger control updates, located by a hybrid bisection-Newton-Raphson root-finding algorithm whose initial point is supplied by minimization.
If this is right
- Control updates are issued only at the predicted instants rather than after continuous monitoring.
- The closed-loop system remains stable under the self-triggered law.
- The volume of communications between controller and plant is considerably smaller than in the underlying event-triggered scheme.
Where Pith is reading between the lines
- The same prediction technique could be tested on systems with modest model mismatch to quantify robustness.
- In bandwidth-limited networks the reduced update rate may translate directly into lower energy or channel usage.
Load-bearing premise
The system model is accurate enough that the future trajectory of the pseudo-Lyapunov function can be predicted without continuous state feedback.
What would settle it
Applying the predicted update instants to a physical or simulated linear plant whose state evolution deviates from the model and checking whether the closed-loop trajectory becomes unstable.
Figures
read the original abstract
Self-triggered control is an improvement on event-triggered control methods. Unlike the latter, self-triggered control does not require monitoring the behavior of the system constantly. Instead, self-triggered algorithms predict the events at which the control law has to be updated before they happen, relying on system model and past information.\\ In this work, we present a self-triggered version of an event-triggered control method in which events are generated when a pseudo-Lyapunov function (PLF) associated with the system increases up to a certain limit. This approach has been shown to considerably decrease the communications between the controller and the plant, while maintaining system stability. To predict the intersections between the PLF and the upper limit, we use a simple and fast root-finding algorithm. The algorithm mixes the global convergence properties of the bisection and the fast convergence properties of the Newton-Raphson method. \\ Moreover, to ensure the convergence of the method, the initial iterate of the algorithm is found through a minimization algorithm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a self-triggered stabilizing controller for linear continuous-time systems. It extends a prior event-triggered scheme that generates updates when a pseudo-Lyapunov function (PLF) reaches a design threshold; the self-triggered version replaces continuous monitoring by predicting the next crossing time via a hybrid bisection–Newton-Raphson root finder whose initial guess is obtained by a separate minimization. The claimed benefit is a substantial reduction in controller-to-plant communications while preserving closed-loop stability.
Significance. If the numerical prediction is guaranteed to occur no later than the true first PLF crossing, the method supplies a concrete, implementable alternative to both periodic and event-triggered control for linear plants, with the hybrid solver offering a pragmatic balance of reliability and speed. The approach is directly falsifiable through simulation on benchmark linear systems and could be extended to other PLF-based designs.
major comments (2)
- [Root-finding algorithm (description and convergence analysis)] The stability argument rests on the computed root being strictly less than or equal to the first positive time at which the true PLF trajectory reaches its upper bound. No a-priori residual bound, Lipschitz constant on the PLF derivative, or isolation argument is supplied to guarantee that the hybrid solver (bisection + Newton-Raphson) returns a time that precedes the actual crossing, even under exact arithmetic. A small overshoot would allow the PLF to exceed its design limit before the next control update is applied.
- [Stability theorem and prediction step] The forward prediction of the PLF trajectory is performed with the nominal linear model. No robustness margin or sensitivity analysis is given with respect to model mismatch, discretization error in the numerical integration of the PLF, or floating-point effects; any of these could shift the true crossing earlier than the predicted time.
minor comments (3)
- [§2] Notation for the PLF and its upper limit should be introduced with a short self-contained recap in §2, rather than assuming familiarity with the referenced event-triggered paper.
- [Algorithm 1] The minimization procedure used to obtain the initial iterate for the root finder is described at a high level; a pseudocode listing or explicit statement of the objective function would improve reproducibility.
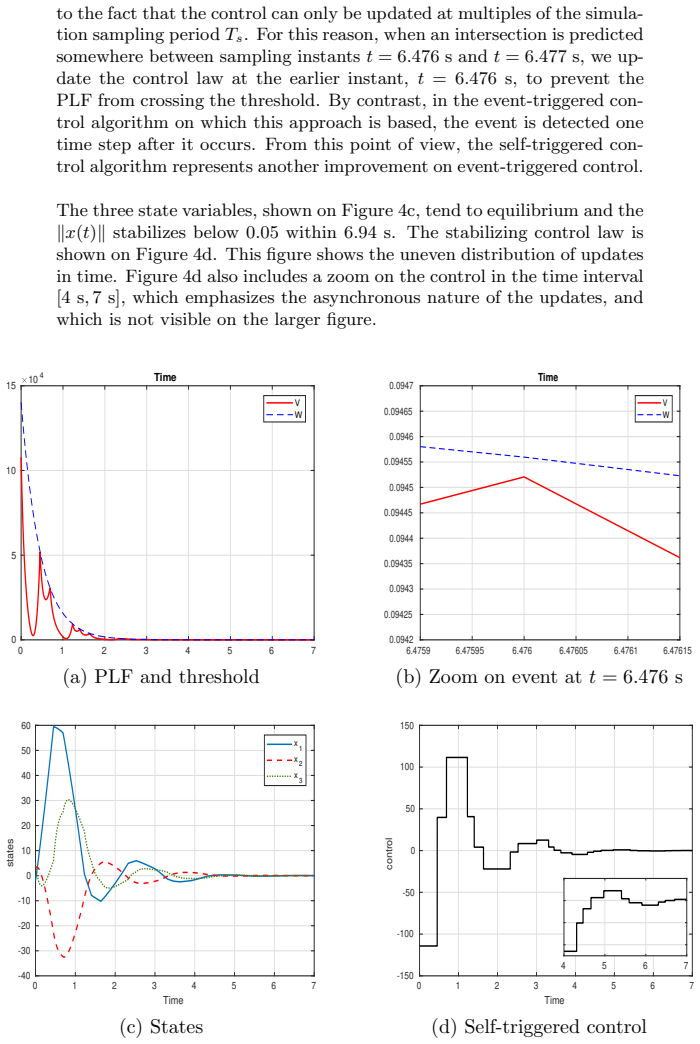
- [Numerical examples] Figure captions should state the system matrices, initial condition, and design parameters used, so that the reported inter-update intervals can be reproduced.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address each major comment below.
read point-by-point responses
-
Referee: Root-finding algorithm (description and convergence analysis): The stability argument rests on the computed root being strictly less than or equal to the first positive time at which the true PLF trajectory reaches its upper bound. No a-priori residual bound, Lipschitz constant on the PLF derivative, or isolation argument is supplied to guarantee that the hybrid solver (bisection + Newton-Raphson) returns a time that precedes the actual crossing, even under exact arithmetic. A small overshoot would allow the PLF to exceed its design limit before the next control update is applied.
Authors: We agree that the manuscript does not supply an a-priori residual bound or Lipschitz argument guaranteeing that the hybrid solver never returns a time after the true crossing. The bisection step is intended to maintain a bracket containing the root while Newton-Raphson accelerates within that bracket, and the minimization provides the initial iterate. In revision we will expand the algorithm description to clarify these safeguards and note the practical conditions (monotonicity of the PLF) under which overshoot is avoided. A full theoretical guarantee with explicit constants would require additional analysis. revision: partial
-
Referee: Stability theorem and prediction step: The forward prediction of the PLF trajectory is performed with the nominal linear model. No robustness margin or sensitivity analysis is given with respect to model mismatch, discretization error in the numerical integration of the PLF, or floating-point effects; any of these could shift the true crossing earlier than the predicted time.
Authors: The stability theorem is stated for the exact nominal linear model, which is the standard setting for this class of self-triggered results. We will revise the manuscript to state this modeling assumption explicitly in the theorem statement and add a short paragraph acknowledging that model mismatch, integration errors, and floating-point effects are not analyzed, suggesting them as directions for future work. revision: yes
- A complete a-priori convergence analysis with residual bounds for the hybrid root finder to ensure it never exceeds the true PLF crossing time.
Circularity Check
No significant circularity detected
full rationale
The paper describes a self-triggered controller that predicts PLF crossing times via a hybrid bisection/Newton-Raphson root finder whose initial guess comes from a separate minimization. No equations, fitted parameters, or self-citations appear in the provided text that would make any stability claim or prediction reduce to its own inputs by construction. The approach explicitly relies on an external system model and past data, rendering the derivation self-contained rather than tautological.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Self-triggered control for the stabilization of linear systems
Durand S, Guerrero-Castellanos JF, Lozano-Leal R. Self-triggered control for the stabilization of linear systems. In: 9th International Conference on Electrical Engineering, Computing Science and Auto- matic Control (CCE). ; 2012
work page 2012
-
[2]
Optimal-sampling-inspired Self-Triggered control
Velasco M, Mart´ ı P, Bini E. Optimal-sampling-inspired Self-Triggered control. In: International Conference on Event-based Control, Com- munication, and Signal Processing (EBCCSP). ; 2015
work page 2015
-
[3]
Event-triggered Control with Self-triggered Sampling for Discrete-time Uncertain Systems
Kishida M. Event-triggered Control with Self-triggered Sampling for Discrete-time Uncertain Systems. IEEE Transactions on Automatic Control 2018; 64(3): 1273-1279
work page 2018
-
[4]
On Self-Triggered Control for Linear Systems: Guarantees and Complexity
Mazo M, Anta A, Tabuada P. On Self-Triggered Control for Linear Systems: Guarantees and Complexity. In: Proceedings of the Euro- pean Control Conference. ; 2009; Budapest, Hungary
work page 2009
-
[5]
Self-Triggered Optimal Control of Lin- ear Systems Using Convex Quadratic Programming
Kobayashi K, Hiraishi K. Self-Triggered Optimal Control of Lin- ear Systems Using Convex Quadratic Programming. In: AMC2014- Yokohama. ; 2014; Yokohama, Japan
work page 2014
-
[6]
Self-Triggered Feedback Control Systems With Finite-Gain L2 Stability
Wang X, Lemmon MD. Self-Triggered Feedback Control Systems With Finite-Gain L2 Stability. IEEE Transactions on Automatic Control 2009; 54(3): 452-467
work page 2009
-
[7]
Self-triggered feedback systems with state- independent disturbances
Wang X, Lemmon MD. Self-triggered feedback systems with state- independent disturbances. In: 2009 American Control Conference. ; 2009; St. Louis, MO, USA
work page 2009
-
[8]
Self-triggered model predictive control with delay compensation for networked control systems
Kobayashi K, Hiraishi K. Self-triggered model predictive control with delay compensation for networked control systems. In: 38th Annual Conference on IEEE Industrial Electronics Society. ; 2012
work page 2012
-
[9]
Multiple-loop self-triggered model predictive control for network scheduling and control
Henriksson E, Quevedo DE, Peters EGW, Sandberg H, Johansson KH. Multiple-loop self-triggered model predictive control for network scheduling and control. IEEE Transactions on Control Systems Tech- nology 2015; 23(6): 2167-2181
work page 2015
-
[10]
Event-triggered stabilizing controllers based on an exponentially decreasing threshold
Zobiri F, Meslem N, Bid´ egaray-Fesquet B. Event-triggered stabilizing controllers based on an exponentially decreasing threshold. In: Third International Conference on Event-Based Control, Communications, and Signal Processing, Funchal, Portugal. ; 2017. 18
work page 2017
-
[11]
Gill PE, Murray W, Wright MH. Practical optimization. Elsevier Academic Press . 1986
work page 1986
-
[12]
Boyd S, Vandenberghe L. Convex Optimization. Cambridge univer- sity press, New York . 2014
work page 2014
-
[13]
Numerical recipes : the art of scientific computing
Press WH, Teukolsky S, Flannery BP, Vetterling WT. Numerical recipes : the art of scientific computing . Cambridge University Press. third edition ed. 2007
work page 2007
-
[14]
Dorf RC, Bishop R. Modern control systems. Pearson Education, Inc. . 2014. 19
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.