Human Pose Estimation for Real-World Crowded Scenarios
Pith reviewed 2026-05-24 21:09 UTC · model grok-4.3
The pith
Occlusion augmentation from COCO, explicit occluded-part detection, and an extended JTA dataset raise pose estimation accuracy in crowds by 4.7 percent AP.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors establish that the combination of COCO-based occlusion augmentation during training, the use of JTA's occlusion flags to train a two-branch model distinguishing visible and occluded parts, and the creation of an extension to the JTA dataset to better match real-world crowd densities and pose variety, raises the accuracy of a baseline pose detector by 4.7% AP on crowded scenarios and matches state-of-the-art performance.
What carries the argument
Occlusion data augmentation using COCO cutouts combined with explicit occluded-body-part detection via JTA flags and a dataset extension for transfer to real crowds.
Load-bearing premise
The JTA extension and COCO occlusion augmentation create training examples that match the distribution of real-world crowd occlusions and densities without harmful artifacts.
What would settle it
Running the method on a fresh, real-world crowded pose dataset collected independently and checking whether the 4.7% AP improvement still appears would confirm or refute the claim.
Figures





read the original abstract
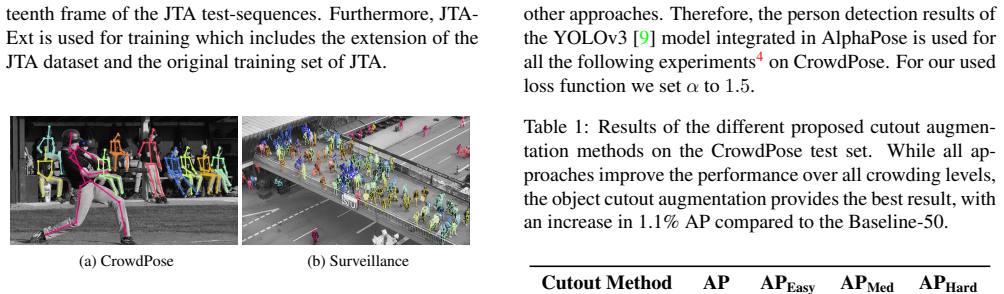
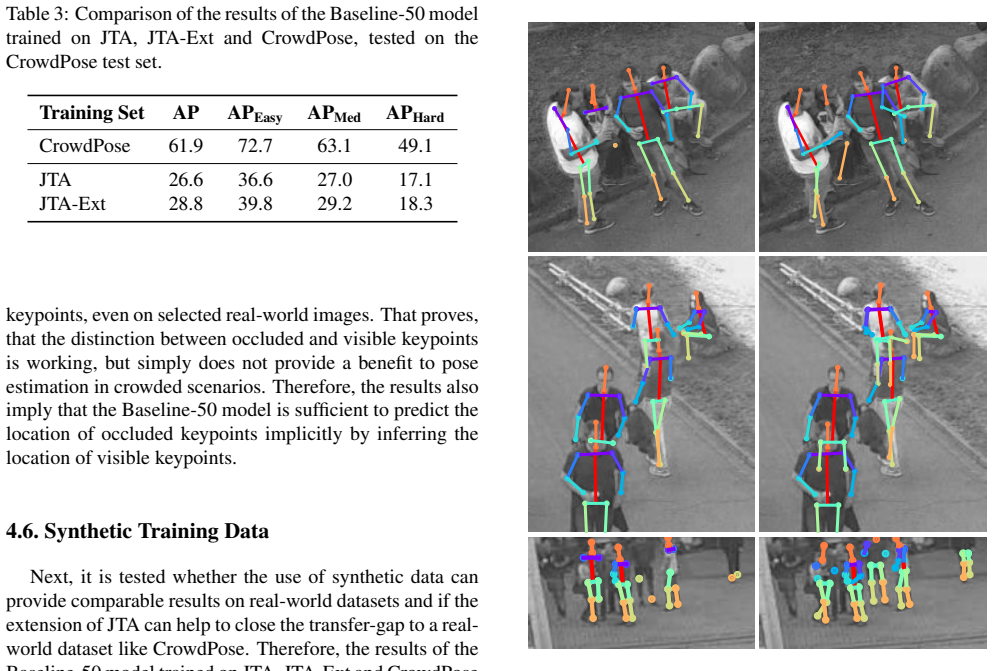
Human pose estimation has recently made significant progress with the adoption of deep convolutional neural networks. Its many applications have attracted tremendous interest in recent years. However, many practical applications require pose estimation for human crowds, which still is a rarely addressed problem. In this work, we explore methods to optimize pose estimation for human crowds, focusing on challenges introduced with dense crowds, such as occlusions, people in close proximity to each other, and partial visibility of people. In order to address these challenges, we evaluate three aspects of a pose detection approach: i) a data augmentation method to introduce robustness to occlusions, ii) the explicit detection of occluded body parts, and iii) the use of the synthetic generated datasets. The first approach to improve the accuracy in crowded scenarios is to generate occlusions at training time using person and object cutouts from the object recognition dataset COCO (Common Objects in Context). Furthermore, the synthetically generated dataset JTA (Joint Track Auto) is evaluated for the use in real-world crowd applications. In order to overcome the transfer gap of JTA originating from a low pose variety and less dense crowds, an extension dataset is created to ease the use for real-world applications. Additionally, the occlusion flags provided with JTA are utilized to train a model, which explicitly distinguishes between occluded and visible body parts in two distinct branches. The combination of the proposed additions to the baseline method help to improve the overall accuracy by 4.7% AP and thereby provide comparable results to current state-of-the-art approaches on the respective dataset.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper explores improvements to human pose estimation in crowded real-world scenarios by evaluating three modifications to a baseline: (i) occlusion augmentation via person/object cutouts from COCO, (ii) a two-branch architecture that explicitly detects occluded vs. visible body parts, and (iii) training on an extended version of the synthetic JTA dataset created to increase pose variety and crowd density. The authors report that the combination yields a 4.7% AP gain and reaches performance comparable to current state-of-the-art methods on the evaluated dataset.
Significance. If the reported gains are shown to be robust and the synthetic data distributions are validated to match real-world test conditions, the work would provide a practical set of techniques for handling occlusions and proximity in crowd pose estimation, which remains an important but under-addressed application area.
major comments (2)
- [Abstract, §4] Abstract and §4 (dataset extension description): the central 4.7% AP claim and SOTA-comparable result rest on the assumption that the JTA extension plus COCO cutout augmentation produce occlusion statistics and crowd densities that match real-world test distributions. No quantitative validation (e.g., histograms of inter-person distances, occlusion fractions, or pose entropy) is described; without it the measured improvement could be an artifact of the synthetic distribution rather than a general solution.
- [§3] §3 (experimental setup): the abstract reports a 4.7% AP improvement but provides no details on the baseline architecture, exact evaluation metric (AP@? IoU), dataset splits, statistical significance, or number of runs. These omissions make it impossible to assess whether the gain is load-bearing for the three proposed modifications or could be explained by confounds.
minor comments (1)
- [Abstract] The phrase 'the respective dataset' in the abstract is ambiguous; the manuscript should explicitly name the test set(s) used for the final comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript accordingly where needed.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and §4 (dataset extension description): the central 4.7% AP claim and SOTA-comparable result rest on the assumption that the JTA extension plus COCO cutout augmentation produce occlusion statistics and crowd densities that match real-world test distributions. No quantitative validation (e.g., histograms of inter-person distances, occlusion fractions, or pose entropy) is described; without it the measured improvement could be an artifact of the synthetic distribution rather than a general solution.
Authors: We agree that the manuscript would be strengthened by explicit quantitative validation of the distribution match. Although gains are measured on real-world test data, no histograms or entropy comparisons between the extended JTA/COCO augmentations and the test set are currently provided. In revision we will add these analyses (inter-person distance histograms, occlusion fraction distributions, and pose entropy) to support the claim that the training distributions are representative. revision: yes
-
Referee: [§3] §3 (experimental setup): the abstract reports a 4.7% AP improvement but provides no details on the baseline architecture, exact evaluation metric (AP@? IoU), dataset splits, statistical significance, or number of runs. These omissions make it impossible to assess whether the gain is load-bearing for the three proposed modifications or could be explained by confounds.
Authors: We acknowledge these details are missing from the abstract and experimental setup section. The revised manuscript will explicitly describe the baseline architecture, state the precise AP metric including the IoU threshold, document the dataset splits, and report results with standard deviations across multiple runs to demonstrate statistical significance and rule out confounds. revision: yes
Circularity Check
No significant circularity; purely empirical evaluation of modifications
full rationale
The paper reports measured AP gains from three empirical modifications (COCO-based occlusion augmentation, JTA extension for density/pose variety, and explicit occlusion branches) evaluated on the respective dataset. No derivation chain, first-principles predictions, fitted parameters renamed as outputs, or self-citation load-bearing uniqueness theorems appear. The 4.7% improvement is a direct experimental outcome, not a quantity forced by construction from the inputs. The dataset-simulation assumption is a validity concern, not a circularity reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Convolutional neural networks trained on augmented data can generalize to occluded poses in crowds
Reference graph
Works this paper leans on
-
[1]
M. Andriluka, L. Pishchulin, P. Gehler, and B. Schiele. 2D Human Pose Estimation: New Benchmark and State of the Art Analysis. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2014. 1
work page 2014
-
[2]
Y . Chen, Z. Wang, Y . Peng, Z. Zhang, G. Yu, and J. Sun. Cascaded pyramid network for multi-person pose estimation. CoRR, abs/1711.07319, 2017. 2
work page internal anchor Pith review Pith/arXiv arXiv 2017
- [3]
-
[4]
H.-S. Fang, S. Xie, Y .-W. Tai, and C. Lu. RMPE: Regional multi-person pose estimation. In ICCV, 2017. 5
work page 2017
-
[5]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In 2016 IEEE Conference on Com- puter Vision and Pattern Recognition (CVPR) , pages 770– 778, June 2016. 3
work page 2016
-
[6]
J. Li, C. Wang, H. Zhu, Y . Mao, H.-S. Fang, and C. Lu. Crowdpose: Efficient crowded scenes pose estimation and a new benchmark. arXiv preprint arXiv:1812.00324, 2018. 2, 3, 4, 5, 6, 7, 8
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[7]
T. Lin, M. Maire, S. J. Belongie, L. D. Bourdev, R. B. Girshick, J. Hays, P. Perona, D. Ramanan, P. Doll ´ar, and C. L. Zitnick. Microsoft COCO: common objects in context. CoRR, abs/1405.0312, 2014. 1, 8
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[8]
Stacked Hourglass Networks for Human Pose Estimation
A. Newell, K. Yang, and J. Deng. Stacked hourglass net- works for human pose estimation. CoRR, abs/1603.06937,
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
YOLOv3: An Incremental Improvement
J. Redmon and A. Farhadi. Yolov3: An incremental improve- ment. CoRR, abs/1804.02767, 2018. 5
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[10]
I. S ´ar´andi, T. Linder, K. O. Arras, and B. Leibe. How robust is 3d human pose estimation to occlusion? In IROS Work- shop - Robotic Co-workers 4.0, 2018. 3
work page 2018
-
[11]
B. Xiao, H. Wu, and Y . Wei. Simple baselines for human pose estimation and tracking. In European Conference on Computer Vision (ECCV), 2018. 2, 3, 5, 7, 8
work page 2018
-
[12]
Y . Xiu, J. Li, H. Wang, Y . Fang, and C. Lu. Pose Flow: Efficient online pose tracking. In BMVC, 2018. 5
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.