Unsupervised Learning Technique to Obtain the Coordinates of Wi-Fi Access Points
Pith reviewed 2026-05-24 17:38 UTC · model grok-4.3
The pith
Unknown Wi-Fi nodes and a distance calibration curve can be found together from user measurements alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
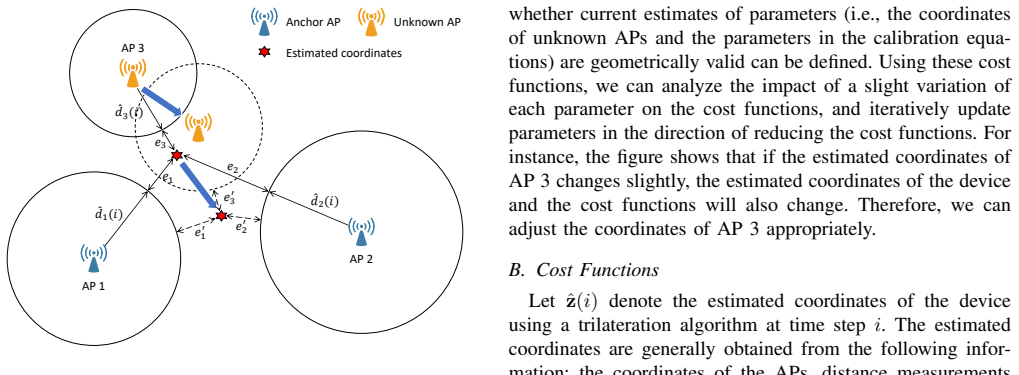
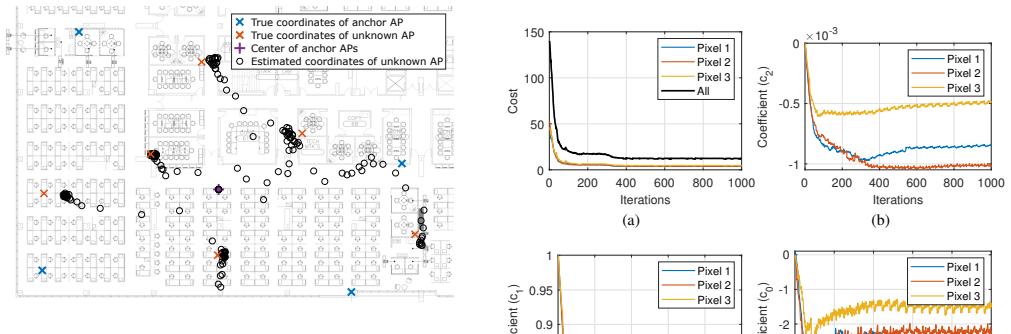
The authors show that the coordinates of unknown nodes and the calibration curve are simultaneously determined without any ground truth data by jointly optimizing over user-collected distance measurements in the presence of known anchors.
What carries the argument
A joint unsupervised optimization that solves for unknown node coordinates and the parameters of a global calibration curve using geometric constraints from user distance reports.
If this is right
- Additional unknown nodes can be turned into usable anchors, raising the total number of anchors available for positioning.
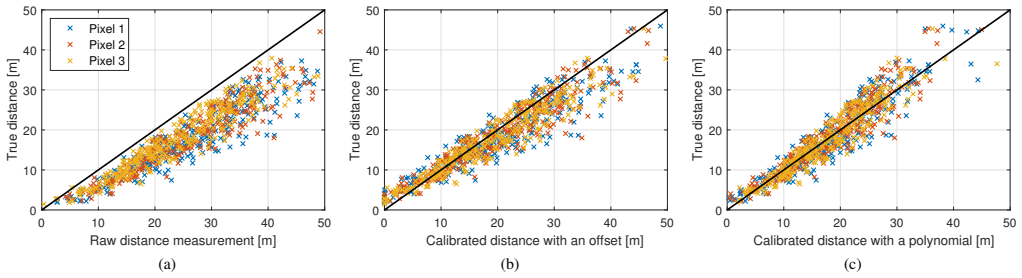
- Raw distance measurements become better calibrated, directly lowering error in subsequent range-based location estimates.
- The process runs automatically from ordinary location-service usage, without separate data collection or manual labeling.
- The same framework applies to any ranging technology whose measurements exhibit a repeatable but unknown distortion curve.
Where Pith is reading between the lines
- Crowd-sourced operation could allow continuous discovery of new access points as they are deployed, keeping a positioning map up to date.
- The learned calibration curve might be reusable across different devices or environments if the underlying hardware distortion is device-independent.
- If the geometric constraints prove insufficient in sparse deployments, the method could be extended by adding weak priors on node placement or measurement noise.
Load-bearing premise
User-generated distance measurements contain sufficient geometric constraints to jointly solve for unknown node positions and a global calibration curve without external references or labeled data.
What would settle it
Apply the method to a dataset of real user distance reports collected in an indoor area whose unknown node positions and true distance-to-range mapping are known independently; check whether the recovered coordinates match the known positions and whether the learned curve reduces ranging error on held-out measurements.
Figures
read the original abstract
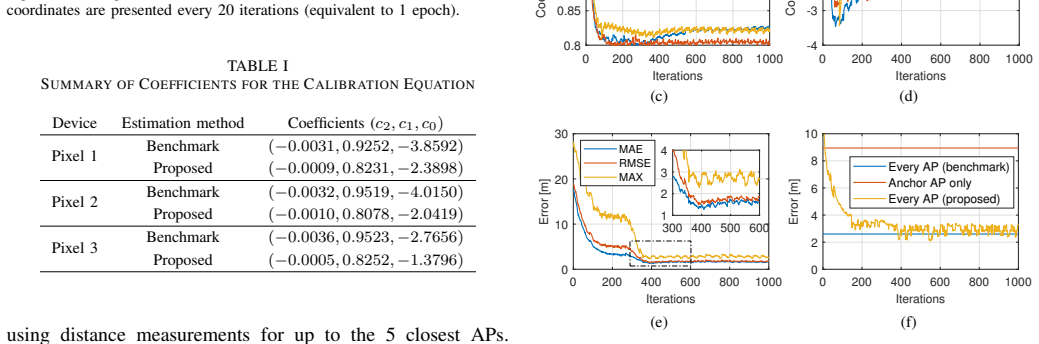
Given that the accuracy of range-based positioning techniques generally increases with the number of available anchor nodes, it is important to secure more of these nodes. To this end, this paper studies an unsupervised learning technique to obtain the coordinates of unknown nodes that coexist with anchor nodes. As users use the location services in an area of interests, the proposed method automatically discovers unknown nodes and estimates their coordinates. In addition, this method learns an appropriate calibration curve to correct the distortion of raw distance measurements. As such, the positioning accuracy can be greatly improved using more anchor nodes and well-calibrated distance measurements. The performance of the proposed method was verified using commercial Wi-Fi devices in a practical indoor environment. The experiment results show that the coordinates of unknown nodes and the calibration curve are simultaneously determined without any ground truth data.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an unsupervised learning technique that automatically discovers unknown Wi-Fi access points coexisting with anchors, estimates their coordinates, and jointly learns a calibration curve to correct raw distance measurements, all from user-generated data without ground truth; it reports experimental verification using commercial devices in a practical indoor environment, claiming that this simultaneously improves positioning accuracy via more anchors and better-calibrated distances.
Significance. If the central claim holds, the approach would allow automatic expansion of the set of usable anchor nodes in range-based Wi-Fi positioning without manual surveying or labeled data, which could meaningfully increase accuracy in indoor environments where anchor density is a limiting factor.
major comments (2)
- [Abstract] Abstract (final sentence): the claim that coordinates of unknown nodes and the calibration curve 'are simultaneously determined without any ground truth data' is load-bearing for the contribution, yet the text supplies no equations, optimization formulation, or identifiability analysis; in range-based multilateration the mapping from distances to positions is invariant under rigid motions and scaling, and a monotonic calibration curve can trade off against position estimates, so it is unclear how the gauge freedoms are fixed without anchors, fixed nodes, or explicit regularization.
- [Abstract] Abstract: the statement that 'the performance of the proposed method was verified using commercial Wi-Fi devices' is central to the experimental claim, but no quantitative results, error metrics, number of trials, or comparison against baselines appear, preventing assessment of whether the data actually support simultaneous recovery of positions and the curve.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below, clarifying the role of anchor nodes and the structure of the experimental claims.
read point-by-point responses
-
Referee: [Abstract] Abstract (final sentence): the claim that coordinates of unknown nodes and the calibration curve 'are simultaneously determined without any ground truth data' is load-bearing for the contribution, yet the text supplies no equations, optimization formulation, or identifiability analysis; in range-based multilateration the mapping from distances to positions is invariant under rigid motions and scaling, and a monotonic calibration curve can trade off against position estimates, so it is unclear how the gauge freedoms are fixed without anchors, fixed nodes, or explicit regularization.
Authors: The method explicitly incorporates known anchor nodes with fixed, surveyed coordinates that coexist with the unknown nodes. These anchors fix the coordinate frame, eliminating rigid-motion and scaling ambiguities in the multilateration problem. The joint unsupervised optimization simultaneously estimates unknown-node positions and the parameters of the monotonic calibration curve, using the known anchors as references to resolve identifiability. The full manuscript presents the optimization formulation; we will revise the abstract to briefly note the anchoring mechanism and joint estimation. revision: yes
-
Referee: [Abstract] Abstract: the statement that 'the performance of the proposed method was verified using commercial Wi-Fi devices' is central to the experimental claim, but no quantitative results, error metrics, number of trials, or comparison against baselines appear, preventing assessment of whether the data actually support simultaneous recovery of positions and the curve.
Authors: The abstract is intentionally concise; the manuscript body reports the quantitative experimental results, including positioning error metrics, number of trials, and comparisons against baselines obtained with commercial devices. To address the concern, we will incorporate key quantitative highlights (e.g., accuracy improvements) into the abstract in the revised version. revision: yes
Circularity Check
No circularity; unsupervised joint estimation presented without self-referential reduction
full rationale
The abstract and provided text describe a joint unsupervised estimation of node coordinates and calibration curve from user distance measurements, claiming determination 'without any ground truth data.' No equations, optimization procedures, or derivation steps are quoted that would allow inspection for self-definition, fitted inputs renamed as predictions, or load-bearing self-citations. The method is framed as discovering unknown nodes and learning a curve simultaneously, but without explicit functional forms, loss functions, or gauge-fixing mechanisms shown, no reduction to inputs by construction can be exhibited. This is the common case of a self-contained empirical claim whose internal logic cannot be shown circular from the given material.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
An indoor wireless positioning system based on wireless local area network infrastructure,
Y .-C. Wang, X. Jia, and H. K. Lee, “An indoor wireless positioning system based on wireless local area network infrastructure,” in Proc. 6th International Symposium on Satellite Navigation Technology Including Mobile Positioning and Location Services , 2003
work page 2003
-
[2]
Indoor localization using improved rss-based lat- eration methods,
J. Yang and Y . Chen, “Indoor localization using improved rss-based lat- eration methods,” in Proc. IEEE Global Telecommunications Conference (GLOBECOM), Nov. 2009, pp. 1–6
work page 2009
-
[3]
Indoor localization for Wi-Fi devices by cross-monitoring AP and weighted triangulation,
B. Kim, W. Bong, and Y . C. Kim, “Indoor localization for Wi-Fi devices by cross-monitoring AP and weighted triangulation,” in Proc. IEEE Consumer Communications and Networking Conference , Jan. 2011
work page 2011
-
[4]
Bluetooth positioning using RSSI and triangulation methods,
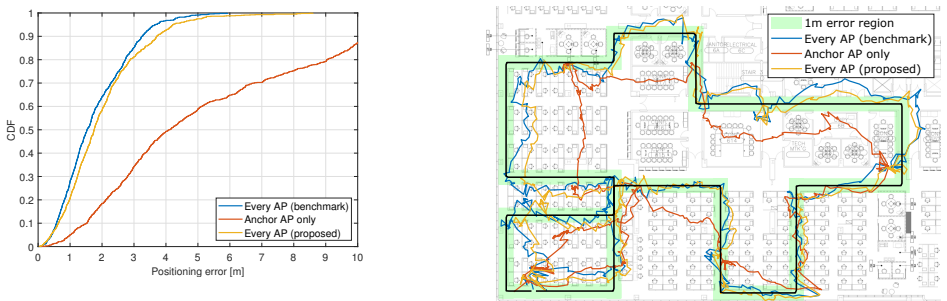
Y . Wang, X. Yang, Y . Zhao, Y . Liu, and L. Cuthbert, “Bluetooth positioning using RSSI and triangulation methods,” in Proc. IEEE Consumer Communications and Networking Conference , Jan. 2013. 1m error region Every AP (benchmark) Anchor AP only Every AP (proposed) Fig. 8. Estimated trajectory with the Google Pixel 3
work page 2013
-
[5]
Spatial channel model for multiple input multiple output (MIMO) simulations,
“Spatial channel model for multiple input multiple output (MIMO) simulations,” 3GPP TR25.996 release 11, Sep. 2012
work page 2012
-
[6]
Study on 3D channel model for LTE,
“Study on 3D channel model for LTE,” 3GPP TR36.873 release 12, Sep. 2014
work page 2014
-
[7]
RADAR: An in-building RF-based user location and tracking system,
P. Bahl and V . N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system,” in Proc. IEEE Conference on Computer Communications (INFOCOM) , Mar. 2000
work page 2000
-
[8]
On indoor position location with wireless LANs,
P. Prasithsangaree, P. Krishnamurthy, and P. Chrysanthis, “On indoor position location with wireless LANs,” in Proc. 13th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Sep. 2002
work page 2002
-
[9]
The Horus WLAN location determination system,
M. Youssef and A. Agrawala, “The Horus WLAN location determination system,” in Proc. 3rd International Conference on Mobile Systems, Applications, and Services (MobiSys) , 2005
work page 2005
-
[10]
A comprehensive study of bluetooth fingerprinting-based algorithms for localization,
L. Zhang, X. Liu, J. Song, C. Gurrin, and Z. Zhu, “A comprehensive study of bluetooth fingerprinting-based algorithms for localization,” in Proc. 27th International Conference on Advanced Information Network- ing and Applications Workshops , Mar. 2013
work page 2013
-
[11]
CSI-based fingerprinting for indoor localization: A deep learning approach,
X. Wang, L. Gao, S. Mao, and S. Pandey, “CSI-based fingerprinting for indoor localization: A deep learning approach,” IEEE Trans. on V eh. Technol., vol. 66, no. 1, pp. 763–776, Jan. 2017
work page 2017
-
[12]
High-accuracy indoor geolocation using collaborative time of arrival (CToA),
L. Banin, O. Bar-Shalom, N. Dvorecki, and Y . Amizur, “High-accuracy indoor geolocation using collaborative time of arrival (CToA),” Intel White Paper, Sep. 2017
work page 2017
-
[13]
Verification: Accuracy evaluation of WiFi fine time measurements on an open platform,
M. Ibrahim, H. Liu, M. Jawahar, V . Nguyen, M. Gruteser, R. Howard, B. Yu, and F. Bai, “Verification: Accuracy evaluation of WiFi fine time measurements on an open platform,” in Proc. 24th Annual International Conference on Mobile Computing and Networking (MobiCom) , 2018
work page 2018
-
[14]
Unsupervised learning techniques for trilateration: From theory to android App implementation,
J. Choi, Y .-S. Choi, and S. Talwar, “Unsupervised learning techniques for trilateration: From theory to android App implementation,” Submitted to IEEE Access , 2019
work page 2019
-
[15]
A new anchor nodes position determination method supporting UWB localization system deployment,
V . Djaja-Josko, “A new anchor nodes position determination method supporting UWB localization system deployment,” in Signal Processing Symposium (SPSympo) , Sep. 2017
work page 2017
-
[16]
Distributed weighted- multidimensional scaling for node localization in sensor networks,
J. A. Costa, N. Patwari, and A. O. Hero, III, “Distributed weighted- multidimensional scaling for node localization in sensor networks,”ACM Trans. Sen. Netw. , vol. 2, no. 1, pp. 39–64, Feb. 2006
work page 2006
-
[17]
Self-organizing localiza- tion with adaptive weights for wireless sensor networks,
W. Yu, J. Choi, Y . Kim, W. Lee, and S. Kim, “Self-organizing localiza- tion with adaptive weights for wireless sensor networks,” IEEE Sensors J., vol. 18, no. 20, pp. 8484–8492, Oct. 2018
work page 2018
-
[18]
Available: https://source.android.com/devices/tech/connect/ wifi-rtt
[Online]. Available: https://source.android.com/devices/tech/connect/ wifi-rtt
-
[19]
Least squares al- gorithms for time-of-arrival-based mobile location,
K. W. Cheung, H. C. So, W. . Ma, and Y . T. Chan, “Least squares al- gorithms for time-of-arrival-based mobile location,” IEEE Trans. Signal Process., vol. 52, no. 4, pp. 1121–1130, April 2004
work page 2004
-
[20]
Weighted least squares techniques for improved received signal strength based localization,
B. A. M. Tarro, P. and J. R. Casar, “Weighted least squares techniques for improved received signal strength based localization,” Sensors, vol. 11(9), Sep. 2011
work page 2011
-
[21]
K. Bregar and M. Mohori, “Improving indoor localization using convo- lutional neural networks on computationally restricted devices,” IEEE Access, vol. 6, pp. 17,429–17,441, 2018
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.