Combined Stochastic and Robust Optimization for Electric Autonomous Mobility-on-Demand with Nested Benders Decomposition
Pith reviewed 2026-05-18 21:20 UTC · model grok-4.3
The pith
A combined stochastic and robust model predictive control framework for electric autonomous mobility-on-demand fleets reduces median passenger waiting times by up to 36 percent and electricity costs by more than 35 percent.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
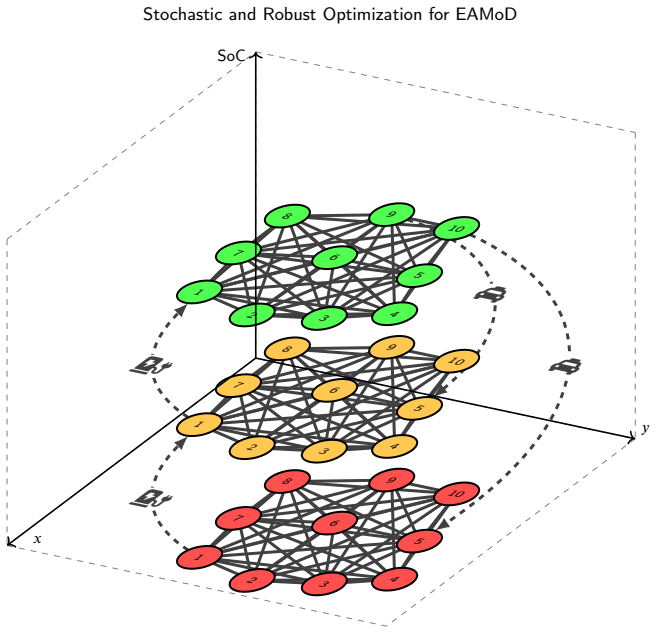
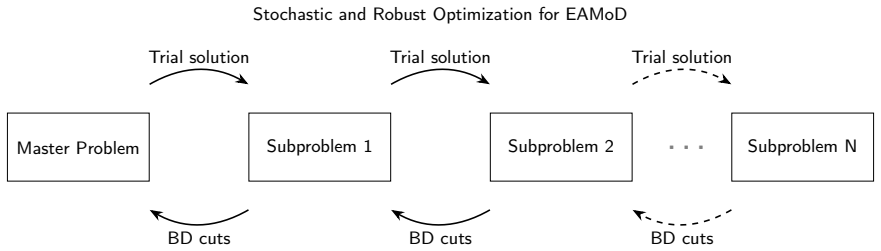
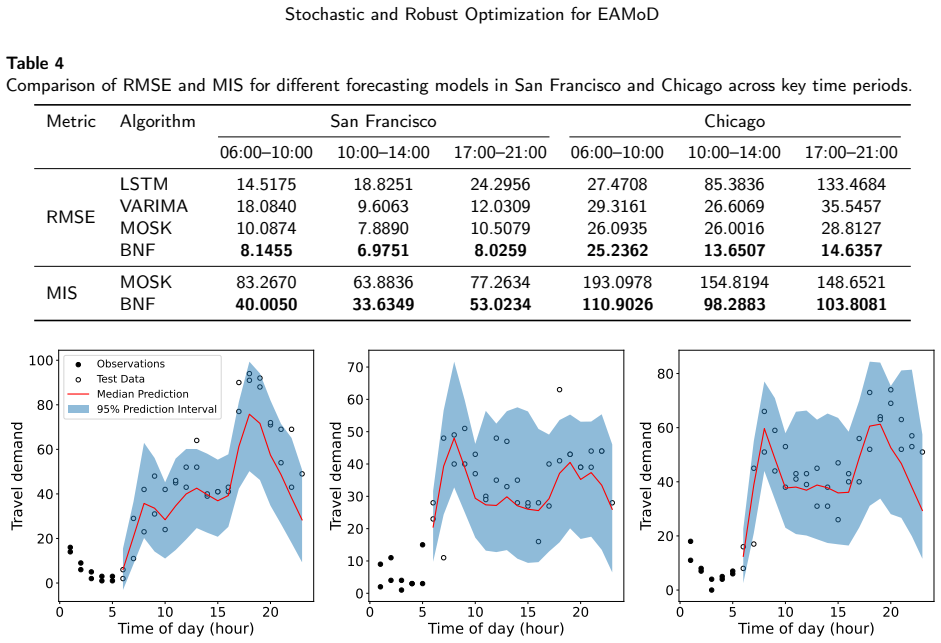
We formulate a multi-stage stochastic-robust model predictive control problem that incorporates spatio-temporal Bayesian neural network forecasts of demand, travel time, energy consumption, and charger availability, augments the model with robust constraints on energy and travel time to guard against adverse realizations, and solves the resulting large-scale mixed-integer linear program with a tailored Nested Benders Decomposition algorithm. In closed-loop high-fidelity simulations of San Francisco and Chicago, the combined approach yields up to 36 percent lower median passenger waiting times, nearly 20 percent lower 95th-percentile delays, 27 percent less rebalancing distance, and more than
What carries the argument
A multi-stage stochastic optimization model with added robust constraints on energy consumption and travel times, solved by Nested Benders Decomposition that decomposes the scenario tree for efficient parallel solution.
If this is right
- Dispatch, rebalancing, and charging decisions can be coordinated in a single optimization that anticipates variability while protecting against worst-case energy and time outcomes.
- Median passenger waiting times drop by up to 36 percent and 95th-percentile delays by nearly 20 percent relative to simpler controllers.
- Rebalancing distance falls by 27 percent and electricity costs by more than 35 percent.
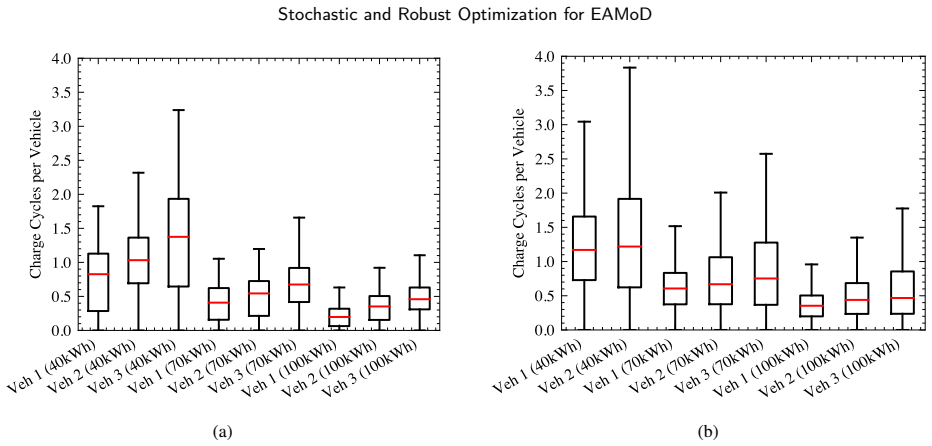
- Energy-efficient vehicles maintain performance with smaller batteries, whereas less efficient vehicles need larger batteries and denser charging support.
Where Pith is reading between the lines
- The same combined stochastic-robust structure could be tested on related fleet problems such as last-mile delivery or shared electric scooters where both typical and extreme conditions matter.
- Online updating of the Bayesian forecasts from live vehicle data would likely increase the realized gains beyond the offline simulation results.
- City planners could use the battery-size sensitivity results to set minimum vehicle-efficiency standards or charging-station density targets before large-scale EAMoD rollout.
Load-bearing premise
The Bayesian neural network forecasts of demand, travel time, energy consumption, and charger availability remain accurate enough outside the simulation that the computed plans retain their reported performance advantages in actual deployment.
What would settle it
Deploy the full closed-loop controller on a real electric autonomous fleet for several weeks and measure whether median waiting times, 95th-percentile delays, rebalancing distance, and electricity cost differ from the deterministic and robust baselines by the margins reported in simulation.
Figures








read the original abstract
The electrification and automation of mobility are reshaping how cities operate on-demand transport systems. Managing Electric Autonomous Mobility-on-Demand (EAMoD) fleets effectively requires coordinating dispatch, rebalancing, and charging decisions under multiple uncertainties, including travel demand, travel time, energy consumption, and charger availability. We address this challenge with a combined stochastic and robust model predictive control (MPC) framework. The framework integrates spatio-temporal Bayesian neural network forecasts with a multi-stage stochastic optimization model, formulated as a large-scale mixed-integer linear program. To ensure real-time applicability, we develop a tailored Nested Benders Decomposition that exploits the scenario tree structure and enables efficient parallelized solution. Stochastic optimization is employed to anticipate demand and infrastructure variability, while robust constraints on energy consumption and travel times safeguard feasibility under worst-case realizations. We evaluate the framework using high-fidelity simulations of San Francisco and Chicago. Compared with deterministic, reactive, and robust baselines, the combined stochastic and robust approach reduces median passenger waiting times by up to 36% and 95th-percentile delays by nearly 20%, while also lowering rebalancing distance by 27% and electricity costs by more than 35%. We also conduct a sensitivity analysis of battery size and vehicle efficiency, finding that energy-efficient vehicles maintain stable performance even with small batteries, whereas less efficient vehicles require larger batteries and greater infrastructure support. Our results emphasize the importance of jointly optimizing predictive control, vehicle capabilities, and infrastructure planning to enable scalable, cost-efficient EAMoD operations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a combined stochastic and robust optimization framework for Electric Autonomous Mobility-on-Demand (EAMoD) using spatio-temporal Bayesian neural network forecasts integrated into a multi-stage stochastic-robust MILP. Solved via Nested Benders Decomposition for efficiency, it is tested in high-fidelity simulations of San Francisco and Chicago, reporting up to 36% reduction in median waiting times, 20% in 95th-percentile delays, 27% less rebalancing, and 35% lower electricity costs versus baselines, along with sensitivity analysis on battery and efficiency.
Significance. If validated beyond internal simulations, the results would be significant for EAMoD system design, highlighting advantages of hybrid stochastic-robust MPC over individual approaches and the practicality of the decomposition method for large-scale problems. The sensitivity findings on vehicle efficiency and battery size offer actionable insights for infrastructure. The work builds on standard techniques but applies them innovatively to this domain with computational advances.
major comments (2)
- [Results] The performance gains (e.g., 36% median wait time reduction) are demonstrated in closed-loop simulations that reuse the BNN forecasts for both optimization input and evaluation. This does not isolate the impact of forecast accuracy, which is the load-bearing assumption for the claimed benefits when deployed outside the simulator.
- [Methods] Details on the construction of the scenario tree and the robust uncertainty sets derived from the BNN predictions are insufficient to evaluate potential biases in the stochastic-robust combination.
minor comments (2)
- [Abstract] Clarify whether the 'up to 36%' and other metrics are for San Francisco, Chicago, or both, and under what demand conditions.
- Consider adding a table summarizing the key parameters of the BNN and the optimization model for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive evaluation of the work's significance. We address the two major comments point by point below, agreeing that both warrant revisions to improve clarity and strengthen the claims.
read point-by-point responses
-
Referee: [Results] The performance gains (e.g., 36% median wait time reduction) are demonstrated in closed-loop simulations that reuse the BNN forecasts for both optimization input and evaluation. This does not isolate the impact of forecast accuracy, which is the load-bearing assumption for the claimed benefits when deployed outside the simulator.
Authors: We agree that the closed-loop simulations employ the same BNN forecasts for both the MPC optimization and the evaluation environment. This design evaluates the framework's performance when forecasts are representative of the simulated dynamics, which is a common approach for assessing predictive control methods. However, the referee correctly identifies that this does not fully isolate the effect of forecast accuracy or test robustness to forecast errors in deployment. In the revised manuscript, we will add a new subsection with sensitivity experiments that introduce controlled noise to the BNN predictions or use held-out historical data for evaluation. These results will quantify how performance degrades with forecast mismatch and better support the deployment claims. revision: yes
-
Referee: [Methods] Details on the construction of the scenario tree and the robust uncertainty sets derived from the BNN predictions are insufficient to evaluate potential biases in the stochastic-robust combination.
Authors: We concur that the current description of scenario tree construction and robust set derivation lacks sufficient detail for independent assessment of biases. The revised manuscript will include an expanded Methods subsection that explicitly describes: (i) how posterior samples from the spatio-temporal BNN are used to generate the multi-stage scenario tree, including branching factors, scenario reduction technique, and probability assignment; and (ii) the precise formulation of the robust uncertainty sets for energy consumption and travel times (e.g., using BNN-derived prediction intervals or worst-case bounds) and how they are combined with the stochastic scenarios via the hybrid objective and constraints. This will allow readers to evaluate potential biases in the stochastic-robust integration. revision: yes
Circularity Check
No circularity in derivation; standard stochastic-robust MPC applied to EAMoD with external simulation validation
full rationale
The paper's core derivation formulates a multi-stage stochastic-robust MILP that takes spatio-temporal BNN forecasts of demand, travel time, energy, and charger availability as exogenous inputs, then applies robust constraints on worst-case realizations and solves via Nested Benders Decomposition. Performance metrics (waiting times, delays, rebalancing distance, electricity costs) are generated by forward simulation against deterministic/reactive/robust baselines rather than by fitting or re-deriving the same quantities inside the model. No equations reduce by construction to their own inputs, no load-bearing self-citations are invoked to justify uniqueness, and the BNN component is treated as a separate forecasting module whose accuracy is assumed for the optimization step. The framework is therefore self-contained against external simulation benchmarks.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Interactive Trajectory Planning with Learning-based Distributionally Robust Model Predictive Control and Markov Systems
PAC learning-based DR-MPC framework interpolates between robust MPC and stochastic MPC for interactive trajectory planning under agent decision uncertainty.
Reference graph
Works this paper leans on
-
[1]
Five big challenges facing big cities of the future.World Economic Forum, 2024
World Economic Forum. Five big challenges facing big cities of the future.World Economic Forum, 2024
work page 2024
-
[2]
United Nations Development Programme. Rapid urbanisation: Opportunities and challenges to improve the well-being of societies.https: //hdr.undp.org, 2017
work page 2017
-
[3]
Want a sustainable future? then look to the world’s cities.Nature,620(7975):697, August 2023
Nature Editorial. Want a sustainable future? then look to the world’s cities.Nature,620(7975):697, August 2023. Editorial
work page 2023
-
[4]
Undp issues brief on urban climate resilience
United Nations Development Programme (UNDP). Undp issues brief on urban climate resilience. UNDP Issues Brief, November 2020. Published November 2, 2020
work page 2020
-
[5]
M. Batty, K.W. Axhausen, F. Giannotti, A. Pozdnoukhov, A. Bazzani, M. Wachowicz, G. Ouzounis, and Y. Portugali. Smart cities of the future. The European Physical Journal Special Topics, 214:481–518, 2012
work page 2012
-
[6]
K.Spieser,KyleTreleaven,RickZhang,EmilioFrazzoli,DanielMorton,andMarcoPavone. Towardasystematicapproachtothedesignand evaluation of automated mobility-on-demand systems: A case study in singapore. In Gereon Meyer and Sven Beiker, editors,Road Vehicle Automation, Lecture Notes in Mobility, pages 229–245. Springer, Cham, December 2014
work page 2014
-
[7]
G. Zardini, D. Gammelli, and M. Pavone. Autonomous mobility-on-demand: Challenges and opportunities.Annual Review of Control, Robotics, and Autonomous Systems, 4:31–54, 2021
work page 2021
-
[8]
Model predictive control of autonomous mobility-on-demand systems
Rick Zhang, Federico Rossi, and Marco Pavone. Model predictive control of autonomous mobility-on-demand systems. In2016 IEEE international conference on robotics and automation (ICRA), pages 1382–1389. IEEE, 2016
work page 2016
-
[9]
RamonIglesias,FedericoRossi,RickZhang,andMarcoPavone. Abcmpnetworkapproachtomodelingandcontrollingautonomousmobility- on-demand systems.The International Journal of Robotics Research, 38(2-3):357–374, 2019
work page 2019
-
[10]
Claudio Ruch, Joel Gächter, Jan Hakenberg, and Emilio Frazzoli. The+ 1 method: model-free adaptive repositioning policies for robotic multi-agent systems.IEEE Transactions on Network Science and Engineering, 7(4):3171–3184, 2020
work page 2020
-
[11]
Stochastic model predictive control for autonomous mobility on demand
Matthew Tsao, Ramon Iglesias, and Marco Pavone. Stochastic model predictive control for autonomous mobility on demand. In2018 21st International conference on intelligent transportation systems (ITSC), pages 3941–3948. IEEE, 2018
work page 2018
-
[12]
Sten Elling Tingstad Jacobsen, Anders Lindman, and Balázs Kulcsár. A predictive chance constraint rebalancing approach to mobility-on- demand services.Communications in Transportation Research, 3:100097, 2023
work page 2023
-
[13]
FeiMiao,SihongHe,LynnPepin,ShuoHan,AbdeltawabHendawi,MohamedEKhalefa,JohnAStankovic,andGeorgePappas. Data-driven distributionally robust optimization for vehicle balancing of mobility-on-demand systems.ACM Transactions on Cyber-Physical Systems, 5(2):1–27, 2021
work page 2021
-
[14]
Jing Gao and Sen Li. Charging autonomous electric vehicle fleet for mobility-on-demand services: Plug in or swap out?Transportation Research Part C: Emerging Technologies, 158:104457, 2024
work page 2024
-
[15]
Sina Faridimehr, Saravanan Venkatachalam, and Ratna Babu Chinnam. A stochastic programming approach for electric vehicle charging network design.IEEE Transactions on Intelligent Transportation Systems, 20(5):1870–1882, 2018
work page 2018
-
[16]
Tian Lei, Shuocheng Guo, Xinwu Qian, and Lei Gong. Understanding charging dynamics of fully-electrified taxi services using large-scale trajectory data.Transportation Research Part C: Emerging Technologies, 143:103822, 2022
work page 2022
-
[17]
Jie Yang, Michael W Levin, Lu Hu, Haobin Li, and Yangsheng Jiang. Fleet sizing and charging infrastructure design for electric autonomous mobility-on-demand systems with endogenous congestion and limited link space.Transportation Research Part C: Emerging Technologies, 152:104172, 2023
work page 2023
-
[18]
SihongHe,ZhiliZhang,ShuoHan,LynnPepin,GuangWang,DeshengZhang,JohnAStankovic,andFeiMiao. Data-drivendistributionally robustelectricvehiclebalancingforautonomousmobility-on-demandsystemsunderdemandandsupplyuncertainties. IEEETransactionson Intelligent Transportation Systems, 24(5):5199–5215, 2023
work page 2023
-
[19]
Berkay Turan, Ramtin Pedarsani, and Mahnoosh Alizadeh. Dynamic pricing and fleet management for electric autonomous mobility on demand systems.Transportation Research Part C: Emerging Technologies, 121:102829, 2020
work page 2020
-
[20]
Zhiwei Tony Qin, Hongtu Zhu, and Jieping Ye. Reinforcement learning for ridesharing: An extended survey.Transportation Research Part C: Emerging Technologies, 144:103852, 2022
work page 2022
-
[21]
Felipe Beltrán, Erlon C Finardi, and Welington de Oliveira. Two-stage and multi-stage decompositions for the medium-term hydrothermal scheduling problem: A computational comparison of solution techniques.International Journal of Electrical Power & Energy Systems, 127:106659, 2021
work page 2021
-
[22]
Generatingscenariotreesformultistagedecisionproblems
KjetilHøylandandSteinWWallace. Generatingscenariotreesformultistagedecisionproblems. Managementscience,47(2):295–307,2001
work page 2001
-
[23]
Amir H Ansaripoor, Fernando S Oliveira, and Anne Liret. Recursive expected conditional value at risk in the fleet renewal problem with alternative fuel vehicles.Transportation Research Part C: Emerging Technologies, 65:156–171, 2016
work page 2016
-
[24]
Yajie Bao, Kimberly J Chan, Ali Mesbah, and Javad Mohammadpour Velni. Learning-based adaptive-scenario-tree model predictive control withimprovedprobabilisticsafetyusingrobustbayesianneuralnetworks. InternationalJournalofRobustandNonlinearControl ,33(5):3312– 3333, 2023
work page 2023
-
[25]
Annals of Operations Research, 152:257–272, 2007
RonaldHochreiterandGeorgChPflug.Financialscenariogenerationforstochasticmulti-stagedecisionprocessesasfacilitylocationproblems. Annals of Operations Research, 152:257–272, 2007
work page 2007
-
[26]
Scenario reduction in stochastic programming.Mathematical programming, 95:493–511, 2003
Jitka Dupačová, Nicole Gröwe-Kuska, and Werner Römisch. Scenario reduction in stochastic programming.Mathematical programming, 95:493–511, 2003
work page 2003
-
[27]
Version-independenceandnesteddistributionsinmultistagestochasticoptimization
GChPflug. Version-independenceandnesteddistributionsinmultistagestochasticoptimization. SIAMJournalonOptimization ,20(3):1406– 1420, 2010
work page 2010
-
[28]
Raimund M Kovacevic and Alois Pichler. Tree approximation for discrete time stochastic processes: a process distance approach.Annals of operations research, 235(1):395–421, 2015
work page 2015
-
[29]
Evaluation of scenario reduction algorithms with nested distance
Markéta Horejšová, Sebastiano Vitali, Miloš Kopa, and Vittorio Moriggia. Evaluation of scenario reduction algorithms with nested distance. Computational Management Science, 17(2):241–275, 2020. Sten Elling Tingstad Jacobsen et al. Page 27 of 29 Stochastic and Robust Optimization for EAMoD
work page 2020
-
[30]
Jacques F Benders. Partitioning procedures for solving mixed-variables programming problems.Numerische Mathematik, 4(1):238–252, 1962
work page 1962
-
[31]
Richard M. Van Slyke and Roger J.-B. Wets. L-shaped linear programs with applications to optimal control and stochastic programming. SIAM Journal on Applied Mathematics, 17(4):638–663, 1969
work page 1969
-
[32]
Andrzej P. Ruszczyński. A regularized decomposition method for minimizing a sum of polyhedral functions.Mathematical Programming, 35(3):309–333, 1986
work page 1986
-
[33]
Julie L. Higle and Suvrajeet Sen. Stochastic decomposition: An algorithm for two-stage linear programs with recourse.Mathematics of Operations Research, 16(3):650–669, 1991
work page 1991
-
[34]
Julie L. Higle and Suvrajeet Sen. A tutorial introduction to stochastic linear programming models.Interfaces, 24(2):63–78, 1994
work page 1994
- [35]
-
[36]
A stochastic approximation method.The Annals of Mathematical Statistics, 22(3):400–407, 1951
Herbert Robbins and Sutton Monro. A stochastic approximation method.The Annals of Mathematical Statistics, 22(3):400–407, 1951
work page 1951
-
[37]
John R Birge. Decomposition and partitioning methods for multistage stochastic linear programs.Operations research, 33(5):989–1007, 1985
work page 1985
-
[38]
Suvrajeet Sen and Zhi Zhou. Multistage stochastic decomposition: A bridge linking stochastic programming and approximate dynamic programming. SIAM Journal on Optimization, 24(3):1278–1309, 2014
work page 2014
-
[39]
Mario V. F. Pereira and Luiz M. V. G. Pinto. Multi-stage stochastic optimization applied to energy planning.Mathematical Programming, 52(1-3):359–375, 1991
work page 1991
-
[40]
Gerd Infanger and David P. Morton. Cut sharing for multistage stochastic linear programs with interstage dependency.Mathematical Programming, 75(2):241–256, 1996
work page 1996
-
[41]
Alexander Shapiro, Darinka Dentcheva, and Andrzej Ruszczyński.Lectures on Stochastic Programming: Modeling and Theory. SIAM, 2 edition, 2011
work page 2011
-
[42]
Stochastic dual dynamic integer programming.Mathematical Programming, 175:461–502, 2019
Suxia Zou and Shabbir Ahmed. Stochastic dual dynamic integer programming.Mathematical Programming, 175:461–502, 2019
work page 2019
-
[43]
Chris Donohue and John R. Birge. The abridged nested decomposition method for multistage stochastic linear programs with relatively complete recourse.Operations Research, 54(3):532–548, 2006
work page 2006
-
[44]
Chih-Chiang Chen and Warren B. Powell. A comparison of resampling procedures for stochastic optimization.Operations Research, 47(1):138–150, 1999
work page 1999
-
[45]
Stochasticdynamiclinearprogramming,2021
MichaelLudkovskiandcollaborators. Stochasticdynamiclinearprogramming,2021. Preprintortechnicalreport(pleaseupdatewithcorrect source if available)
work page 2021
-
[46]
HaticeÇalıkandBernardFortz. Abendersdecompositionmethodforlocatingstationsinaone-wayelectriccarsharingsystemunderdemand uncertainty. Transportation Research Part B: Methodological, 125:121–150, 2019
work page 2019
-
[47]
Santiago Nieto-Isaza, Pirmin Fontaine, and Stefan Minner. The value of stochastic crowd resources and strategic location of mini-depots for last-mile delivery: A benders decomposition approach.Transportation Research Part B: Methodological, 157:62–79, 2022
work page 2022
-
[48]
HamzaAmeer,YujieWang,XiaofeiFan,andZonghaiChen. Hybridoptimizationofevchargingstationplacementandpricingusingbender’s decomposition and nsga-ii algorithm.Applied Energy, 397:126385, 2025
work page 2025
-
[49]
Electric autonomous mobility-on-demand: Jointly optimal vehicle design and fleet operation
Fabio Paparella, Theo Hofman, and Mauro Salazar. Electric autonomous mobility-on-demand: Jointly optimal vehicle design and fleet operation. IEEE Transactions on Intelligent Transportation Systems, 2024
work page 2024
-
[50]
Nikolaos Wassiliadis, Jakob Schneider, Alexander Frank, Leo Wildfeuer, Xue Lin, Andreas Jossen, and Markus Lienkamp. Review of fast charging strategies for lithium-ion battery systems and their applicability for battery electric vehicles.Journal of Energy Storage, 44:103306, 2021
work page 2021
-
[51]
Scalablespatiotemporalprediction with bayesian neural fields.Nature Communications, 15(1):7942, 2024
FerasSaad,JacobBurnim,ColinCarroll,BrianPatton,UrsKöster,RifA.Saurous,andMatthewHoffman. Scalablespatiotemporalprediction with bayesian neural fields.Nature Communications, 15(1):7942, 2024
work page 2024
-
[52]
C. Ruch, S. Hörl, and E. Frazzoli. Amodeus, a simulation-based testbed for autonomous mobility-on-demand systems. In2018 21st International Conference on Intelligent Transportation Systems (ITSC), pages 3639–3644, 2018
work page 2018
-
[53]
Mouna Kchaou-Boujelben. Charging station location problem: A comprehensive review on models and solution approaches.Transportation Research Part C: Emerging Technologies, 132:103376, 2021
work page 2021
-
[54]
A data-driven optimization-based approach for siting and sizing of electric taxi charging stations
Jie Yang, Jing Dong, and Liang Hu. A data-driven optimization-based approach for siting and sizing of electric taxi charging stations. Transportation Research Part C: Emerging Technologies, 77:462–477, 2017
work page 2017
-
[55]
Alan J. Hoffman and Joseph B. Kruskal.Integral Boundary Points of Convex Polyhedra, pages 49–76. Springer Berlin Heidelberg, Berlin, Heidelberg, 2010
work page 2010
-
[56]
Mixed-integer programming for control
Arthur Richards and Jonathan How. Mixed-integer programming for control. InProceedings of the 2005, American Control Conference, 2005., pages 2676–2683. IEEE, 2005
work page 2005
-
[57]
Sergio Lucia, Tiago Finkler, and Sebastian Engell. Multi-stage nonlinear model predictive control applied to a semi-batch polymerization reactor under uncertainty.Journal of process control, 23(9):1306–1319, 2013
work page 2013
-
[58]
Benders, Nested Benders and Stochastic Programming: An Intuitive Introduction
James Murphy. Benders, nested benders and stochastic programming: An intuitive introduction.arXiv preprint arXiv:1312.3158, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[59]
Decompositionalgorithmswithparametricgomorycutsfortwo-stagestochasticinteger programs
DinakarGade,SimgeKüçükyavuz,andSuvrajeetSen. Decompositionalgorithmswithparametricgomorycutsfortwo-stagestochasticinteger programs. Mathematical Programming, 144(1):39–64, 2014
work page 2014
-
[60]
Rui Chen and James Luedtke. On generating lagrangian cuts for two-stage stochastic integer programs.INFORMS Journal on Computing, 34(4):2332–2349, 2022
work page 2022
-
[61]
Springer Science & Business Media, 2011
John R Birge and Francois Louveaux.Introduction to stochastic programming. Springer Science & Business Media, 2011
work page 2011
-
[62]
Michael AH Dempster and RT Thompson. Parallelization and aggregation ofnested benders decomposition.Annals of Operations Research, 81(0):163–188, 1998
work page 1998
- [63]
-
[64]
Michal Piorkowski, Natasa Sarafijanovic-Djukic, and Matthias Grossglauser. Crawdad epfl/mobility, 2022. Dataset. Sten Elling Tingstad Jacobsen et al. Page 28 of 29 Stochastic and Robust Optimization for EAMoD
work page 2022
-
[65]
City of Chicago. Taxi trips (2013 - 2023). https://data.cityofchicago.org/Transportation/Taxi-Trips-2013-2023-/ wrvz-psew/about_data, 2023. Accessed: 2024-10-01
work page 2013
-
[66]
Electric vehicle routing problem with machine learning for energy prediction
Rafael Basso, Balázs Kulcsár, and Ivan Sanchez-Diaz. Electric vehicle routing problem with machine learning for energy prediction. Transportation Research Part B: Methodological, 145:24–55, 2021
work page 2021
-
[67]
Nord Pool. Day-ahead market prices. https://data.nordpoolgroup.com/auction/day-ahead/prices?deliveryDate= 2025-01-25¤cy=SEK&aggregation=DeliveryPeriod&deliveryAreas=SE2, 2025. Accessed: 2025-02-03
work page 2025
-
[68]
Gurobi Optimizer Reference Manual, 2022
Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual, 2022
work page 2022
-
[69]
Gabriel Parra and Felipe Tobar. Spectral mixture kernels for multi-output gaussian processes.Advances in Neural Information Processing Systems, 30, 2017
work page 2017
-
[70]
Eric Zivot and Jiahui Wang. Vector autoregressive models for multivariate time series.Modeling financial time series with S-PLUS®, pages 385–429, 2006
work page 2006
-
[71]
Data-driven model predictive control of autonomous mobility-on-demand systems
Ramon Iglesias, Federico Rossi, Kevin Wang, David Hallac, Jure Leskovec, and Marco Pavone. Data-driven model predictive control of autonomous mobility-on-demand systems. In2018 IEEE international conference on robotics and automation (ICRA), pages 6019–6025. IEEE, 2018
work page 2018
-
[72]
Stateoftheartoflithium-ionpouchcellsinautomotiveapplications:cellteardownandcharacterization
FJGünterandNWassiliadis. Stateoftheartoflithium-ionpouchcellsinautomotiveapplications:cellteardownandcharacterization. Journal of The Electrochemical Society, 169(3):030515, 2022. Sten Elling Tingstad Jacobsenreceived the M.S. degree in applied physics from Chalmers University of Technology, Sweden, in 2020. He is currently working on his Ph.D. jointly at...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.