A Virtual Mechanical Interaction Layer Enables Resilient Human-to-Robot Object Handovers
Pith reviewed 2026-05-17 06:43 UTC · model grok-4.3
The pith
Virtual Model Control creates an interaction layer that lets robots adapt to shifting object poses during human handovers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Virtual Model Control can be used to form a virtual mechanical interaction layer that controls the robot and adapts its actions to dynamic changes in object pose throughout the handover, producing resilient behavior under uncertainties that include complex pose shifts.
What carries the argument
Virtual Model Control formulated as a virtual mechanical interaction layer that continuously adjusts robot motion in response to observed object pose variations.
If this is right
- The robot maintains stable handover actions despite complex changes to the object's pose.
- Resilience holds across various sources of uncertainty without requiring additional sensing hardware.
- Augmented reality provides a channel for bidirectional communication that supports the handover.
- Users express a general preference for the Virtual Model Control profiles paired with the proposed visuals.
Where Pith is reading between the lines
- The same layer could be tested on other close-contact tasks such as joint carrying or tool passing.
- Human preference data from the study could be used to tune the virtual model's stiffness parameters per user.
- Removing the need for motion prediction lowers the computational load for real-time control on smaller robots.
Load-bearing premise
Virtual Model Control can robustly handle complex unmodeled changes in object pose during live human interaction without needing precise human motion prediction or extra sensors.
What would settle it
A sequence of handovers in which the object is deliberately rotated or displaced in patterns outside the virtual model's compensation range, resulting in repeated grasp failures or unsafe robot motions.
Figures



read the original abstract
Object handover is a common form of interaction that is widely present in collaborative tasks. However, achieving it efficiently remains a challenge. We address the problem of ensuring resilient robotic actions that can adapt to complex changes in object pose during human-to-robot object handovers. We propose the use of Virtual Model Control to create an interaction layer that controls the robot and adapts to the dynamic changes in the handover process. Additionally, we propose the use of augmented reality to facilitate bidirectional communication between humans and robots during handovers. We assess the performance of our controller in a set of experiments that demonstrate its resilience to various sources of uncertainties, including complex changes to the object's pose during the handover. Finally, we performed a user study with 16 participants to understand human preferences for different robot control profiles and augmented reality visuals in object handovers. Our results showed a general preference for the proposed approach and revealed insights that can guide further development in adapting the interaction with the user.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes using Virtual Model Control (VMC) to implement a virtual mechanical interaction layer that enables a robot to perform resilient object handovers from a human by adapting in real time to dynamic changes in object pose. It further integrates augmented reality to support bidirectional communication. The approach is evaluated in experiments demonstrating resilience to uncertainties including pose variations, and in a user study with 16 participants assessing preferences for control profiles and AR visuals.
Significance. If the VMC layer can be shown to maintain stable, adaptive behavior under realistic human-induced disturbances, the work would offer a practical control design for safer and more natural human-robot collaboration in handover tasks, reducing reliance on explicit motion prediction. The combination with AR is a useful addition for intuitiveness. The reported experiments and user study provide preliminary support, but the absence of quantitative performance data and formal analysis limits the immediate impact.
major comments (3)
- [Methods] The Virtual Model Control formulation (Methods section) provides no derivation, passivity argument, or bound establishing that closed-loop dynamics remain stable or convergent when observed object pose deviates rapidly from the robot's internal model due to human-applied wrenches or vision latency. The central resilience claim therefore rests on unverified assumptions about bounded forces and low-latency estimation.
- [Experiments] Experiments section: Results are described as demonstrating resilience to complex pose changes, yet no quantitative metrics (e.g., success rates, peak force/torque profiles, completion times), error bars, or statistical comparisons against baselines are reported. This prevents objective assessment of the adaptation performance.
- [User Study] User study: The 16-participant evaluation reports a general preference for the proposed approach, but lacks details on the exact control profiles and AR conditions compared, the questionnaire items, or any statistical analysis of the preference data.
minor comments (2)
- [Abstract] The abstract could more explicitly list the specific sources of uncertainty tested in the experiments.
- [Methods] Notation for virtual forces and impedance parameters should be introduced with clear definitions and units to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have revised the manuscript to incorporate additional analysis, metrics, and details where appropriate.
read point-by-point responses
-
Referee: [Methods] The Virtual Model Control formulation (Methods section) provides no derivation, passivity argument, or bound establishing that closed-loop dynamics remain stable or convergent when observed object pose deviates rapidly from the robot's internal model due to human-applied wrenches or vision latency. The central resilience claim therefore rests on unverified assumptions about bounded forces and low-latency estimation.
Authors: We agree that the original Methods section would benefit from explicit stability analysis. In the revised manuscript we have added a derivation of the closed-loop dynamics under the virtual model, a passivity argument for the interaction layer (leveraging the virtual spring-damper structure), and explicit bounds on pose error that hold when human wrenches remain within the force limits observed in our experiments and vision latency is below the camera update rate used in the setup. These additions directly support the resilience claim under the conditions tested. revision: yes
-
Referee: [Experiments] Experiments section: Results are described as demonstrating resilience to complex pose changes, yet no quantitative metrics (e.g., success rates, peak force/torque profiles, completion times), error bars, or statistical comparisons against baselines are reported. This prevents objective assessment of the adaptation performance.
Authors: We acknowledge that the original presentation omitted explicit quantitative metrics. The revised Experiments section now reports success rates across pose-variation trials, peak force and torque time-series with means and standard deviations, average completion times, and statistical comparisons (paired t-tests) against a baseline position-control method, all with error bars and p-values. revision: yes
-
Referee: [User Study] User study: The 16-participant evaluation reports a general preference for the proposed approach, but lacks details on the exact control profiles and AR conditions compared, the questionnaire items, or any statistical analysis of the preference data.
Authors: We have expanded the User Study section to specify the exact control profiles (VMC with/without AR versus baseline) and AR visual conditions, to list all questionnaire items verbatim, and to include statistical analysis (Friedman test followed by post-hoc Wilcoxon tests with Bonferroni correction) of the preference rankings. revision: yes
Circularity Check
No circularity: control design validated empirically without self-referential reduction
full rationale
The paper introduces Virtual Model Control as a design choice for an interaction layer that adapts robot behavior to unmodeled object pose changes during handovers, augmented by AR for communication. This is framed as a control architecture whose performance is assessed through direct experiments and a 16-participant user study. No derivation, equation, or claim reduces by construction to fitted parameters, prior self-citations, or renamed inputs; the central resilience claim rests on empirical outcomes rather than a closed mathematical loop. The formulation is presented as a testable control strategy, not a first-principles prediction that secretly encodes its own results.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Virtual Model Control can be used to create a stable and adaptive mechanical interaction layer for dynamic object handovers
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
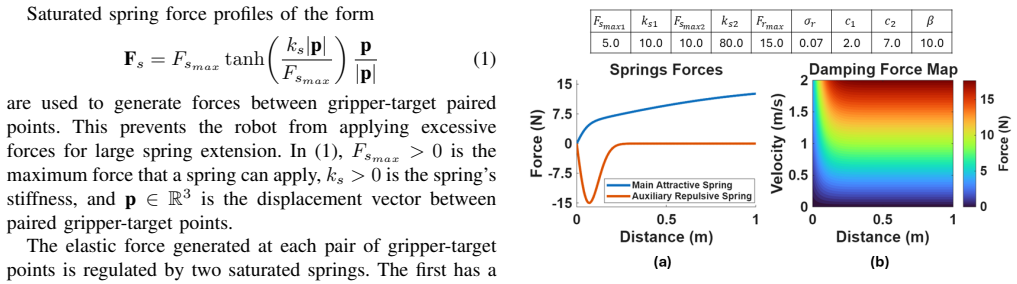
We propose the use of Virtual Model Control to create an interaction layer... saturated spring force profiles Fs = F_smax tanh(ks|p|/F_smax) p/|p| ... virtual dampers Fd = c(|p|) ṗ
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
repulsive spring with Gaussian-like force magnitude profile ... Fr = -|pr| kr exp(-|p|^2 / 2σ_r^2)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Human-robot object handover: Recent progress and future direction,
H. Duan, Y . Yang, D. Li, and P. Wang, “Human-robot object handover: Recent progress and future direction,”Biomim. Intell. Robot., p. 100145, 2024
work page 2024
-
[2]
Object handovers: a review for robotics,
V . Ortenzi, A. Cosgun, T. Pardi, W. P. Chan, E. Croft, and D. Kuli ´c, “Object handovers: a review for robotics,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1855–1873, 2021
work page 2021
-
[3]
J. Dom ´ınguez-Vidal and A. Sanfeliu, “Anticipation and proactivity. unraveling both concepts in human-robot interaction through a han- dover example,” in2024 33rd IEEE Inter . Conf. on Robot and Human Inter . Comm. (RO-MAN). IEEE, 2024, pp. 957–962
work page 2024
-
[4]
Object transfer point predicting based on human comfort model for human- robot handover,
D. Liu, X. Wang, M. Cong, Y . Du, Q. Zou, and X. Zhang, “Object transfer point predicting based on human comfort model for human- robot handover,”IEEE Trans. Instrum. Meas., vol. 70, pp. 1–11, 2021
work page 2021
-
[5]
Predicting human inten- tions in human–robot hand-over tasks through multimodal learning,
W. Wang, R. Li, Y . Chen, Y . Sun, and Y . Jia, “Predicting human inten- tions in human–robot hand-over tasks through multimodal learning,” IEEE Trans. Autom. Sci. Eng., vol. 19, no. 3, pp. 2339–2353, 2021
work page 2021
-
[6]
Object-independent human-to-robot handovers using real time robotic vision,
P. Rosenberger, A. Cosgun, R. Newbury, J. Kwan, V . Ortenzi, P. Corke, and M. Grafinger, “Object-independent human-to-robot handovers using real time robotic vision,”IEEE Robot. Autom. Lett., vol. 6, no. 1, pp. 17–23, 2020
work page 2020
-
[7]
Fed-hanet: Federated visual grasping learning for human robot handovers,
C.-I. Huang, Y .-Y . Huang, J.-X. Liu, Y .-T. Ko, H.-C. Wang, K.-H. Chiang, and L.-F. Yu, “Fed-hanet: Federated visual grasping learning for human robot handovers,”IEEE Robot. Autom. Lett., vol. 8, no. 6, pp. 3772–3779, 2023
work page 2023
-
[8]
Stereo hand-object reconstruction for human-to-robot handover,
Y . L. Pang, A. Xompero, C. Oh, and A. Cavallaro, “Stereo hand-object reconstruction for human-to-robot handover,”IEEE Robot. Autom. Lett., 2025
work page 2025
-
[9]
Soft human-robot handover using a vision-based pipeline,
C. Castellani, E. Turco, V . Bo, M. Malvezzi, D. Prattichizzo, G. Costante, and M. Pozzi, “Soft human-robot handover using a vision-based pipeline,”IEEE Robot. Autom. Lett., 2024
work page 2024
-
[10]
M. Bianchi, G. Averta, E. Battaglia, C. Rosales, M. Bonilla, A. Tondo, M. Poggianiet al., “Touch-based grasp primitives for soft hands: Applications to human-to-robot handover tasks and beyond,” in2018 IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2018, pp. 7794–7801
work page 2018
-
[11]
Human grasp classifi- cation for reactive human-to-robot handovers,
W. Yang, C. Paxton, M. Cakmak, and D. Fox, “Human grasp classifi- cation for reactive human-to-robot handovers,” in2020 IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2020, pp. 11 123–11 130
work page 2020
-
[12]
Reactive human-to-robot handovers of arbitrary objects,
W. Yang, C. Paxton, A. Mousavian, Y .-W. Chao, M. Cakmak, and D. Fox, “Reactive human-to-robot handovers of arbitrary objects,” in 2021 IEEE Int. Conf. Robot. Autom. (ICRA), pp. 3118–3124
work page 2021
-
[13]
Flexible handover with real-time robust dynamic grasp trajectory generation,
G. Zhang, H.-S. Fang, H. Fang, and C. Lu, “Flexible handover with real-time robust dynamic grasp trajectory generation,” in2023 IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), pp. 3192–3199
-
[14]
Reactive Human-to-Robot Dexterous Handovers for Anthropomor- phic Hand,
H. Duan, P. Wang, Y . Yang, D. Li, W. Wei, Y . Luo, and G. Deng, “Reactive Human-to-Robot Dexterous Handovers for Anthropomor- phic Hand,”IEEE Trans. Robot., 2024
work page 2024
-
[15]
Model predictive control for fluid human- to-robot handovers,
W. Yang, B. Sundaralingam, C. Paxton, I. Akinola, Y .-W. Chao, M. Cakmak, and D. Fox, “Model predictive control for fluid human- to-robot handovers,” in2022IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2022, pp. 6956–6962
work page 2022
-
[16]
Handover control for human-robot and robot-robot collaboration,
M. Costanzo, G. De Maria, and C. Natale, “Handover control for human-robot and robot-robot collaboration,”Front. Robot. AI, vol. 8, p. 672995, 2021
work page 2021
-
[17]
Human-robot handovers using task-space quadratic programming,
M. Djeha, A. Dallard, A. Zermane, P. Gergondet, and A. Kheddar, “Human-robot handovers using task-space quadratic programming,” in2022 31st IEEE Inter . Conf. on Robot and Human Inter . Comm. (RO-MAN), pp. 518–523
-
[18]
Z. Wang, J. Chen, Z. Chen, P. Xie, R. Chen, and L. Yi, “Genh2r: Learning generalizable human-to-robot handover via scalable simula- tion demonstration and imitation,” inIEEE/CVF Comput. Soc. Conf. Comput. Vis. Pattern Recognit., 2024, pp. 16 362–16 372
work page 2024
-
[19]
Virtual model control of a biped walking robot,
J. E. Pratt, “Virtual model control of a biped walking robot,”Master’s thesis, 1995
work page 1995
-
[20]
Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers,
D. Larby and F. Forni, “Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers,”arXiv:2411, 2024
work page 2024
-
[21]
Virtual model control: An intuitive approach for bipedal locomotion,
J. Pratt, C.-M. Chew, A. Torres, P. Dilworth, and G. Pratt, “Virtual model control: An intuitive approach for bipedal locomotion,”Int. J. Robot. Res, vol. 20, no. 2, pp. 129–143, 2001
work page 2001
-
[22]
A. Winkler, I. Havoutis, S. Bazeille, J. Ortiz, M. Focchiet al., “Path planning with force-based foothold adaptation and virtual model control for torque controlled quadruped robots,” in2014 IEEE Int. Conf. Robot. Autom. (ICRA), pp. 6476–6482
-
[23]
Virtual model control for quadruped robots,
G. Chen, S. Guo, B. Hou, and J. Wang, “Virtual model control for quadruped robots,”IEEE Access, vol. 8, pp. 140 736–140 751, 2020
work page 2020
-
[24]
Virtual model control for compliant reaching under uncertainties,
Y . Zhang, D. Larby, F. Iida, and F. Forni, “Virtual model control for compliant reaching under uncertainties,” in2024 IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2024, pp. 795–801
work page 2024
-
[25]
Collaborative Drill Alignment in Surgical Robotics,
D. Larby, J. Kershaw, M. Allen, and F. Forni, “Collaborative Drill Alignment in Surgical Robotics,”arXiv:2503.05791, 2025
-
[26]
R. Suzuki, A. Karim, T. Xia, H. Hedayati, and N. Marquardt, “Aug- mented reality and robotics: A survey and taxonomy for ar-enhanced human-robot interaction and robotic interfaces,” in2022 ACM Conf. Hum. Factors Comput. Syst., 2022, pp. 1–33
work page 2022
-
[27]
S. K. Tadeja, T. Zhou, M. Capponi, K. Walas, T. Bohn ´e, and F. Forni, “Using Augmented Reality in Human-Robot Assembly: A Compar- ative Study of Eye-Gaze and Hand-Ray Pointing Methods,” in2024 IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2024, pp. 8786–8793
work page 2024
-
[28]
Visualizing robot intent for object handovers with augmented reality,
R. Newbury, A. Cosgun, T. Crowley-Davis, W. P. Chan, T. Drummond, and E. A. Croft, “Visualizing robot intent for object handovers with augmented reality,” in2022 31st IEEE Inter . Conf. on Robot and Human Inter . Comm. (RO-MAN). IEEE, 2022, pp. 1264–1270
work page 2022
-
[29]
D. Larby, “VMRobotControl.jl,” https://github.com/Cambridge- Control-Lab/VMRobotControl, 2024
work page 2024
-
[30]
G. d. M. Costa, M. R. Petry, and A. P. Moreira, “Augmented reality for human–robot collaboration and cooperation in industrial applications: A systematic literature review,”Sensors, vol. 22, no. 7, p. 2725, 2022
work page 2022
-
[31]
Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research,
S. Hart and L. Staveland, “Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research,”Advances in Psychology, pp. 139–183, 1988
work page 1988
-
[32]
Flow, performance and moderators of challenge-skill balance,
S. Engeser and F. Rheinberg, “Flow, performance and moderators of challenge-skill balance,”Motiv. Emot., vol. 32, no. 3, pp. 158–172, Sep. 2008
work page 2008
-
[33]
SUS: A ’Quick and Dirty’ Usability Scale,
J. Brooke, “SUS: A ’Quick and Dirty’ Usability Scale,” vol. 189, pp. 189–194, November 1996
work page 1996
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.