Adaptive Modular Geometric Control of Robotic Manipulators
Pith reviewed 2026-05-15 16:54 UTC · model grok-4.3
The pith
Decomposing manipulator dynamics into modules enables local geometric controllers with a single adaptation gain that cut RMS position error by at least 12.2 percent.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The adaptive modular geometric control framework decomposes the manipulator dynamics into individual modules to design local geometric control laws at the module level. A geometric adaptation law with only one adaptation gain is incorporated to handle parametric uncertainties, ensuring physically consistent and drift-free estimates. Exponential stability is established for the nominal case, and simulations demonstrate a reduction in RMS position error of at least 12.2% compared to state-of-the-art controllers under nearly identical control effort.
What carries the argument
The adaptive modular geometric control framework, which decomposes overall dynamics into modules for independent local geometric control laws augmented by a single-gain adaptation mechanism.
If this is right
- Exponential stability holds in the nominal case without adaptation.
- RMS position error reduces by at least 12.2 percent with nearly identical control effort.
- Parametric uncertainties are compensated while preserving high tracking performance.
- A single adaptation gain suffices for the entire system with physically consistent estimates.
Where Pith is reading between the lines
- The modular decomposition could simplify controller design for higher-degree-of-freedom robots by adding modules incrementally.
- Similar local geometric laws with minimal adaptation might extend to other coupled mechanical systems such as vehicle suspensions.
- The single-gain structure reduces tuning effort, which could aid real-time deployment on embedded hardware.
Load-bearing premise
Manipulator dynamics can be decomposed into independent modules where local geometric control laws can be designed separately while still guaranteeing global stability and performance.
What would settle it
A hardware test on a redundant manipulator showing no RMS position error reduction near 12 percent or loss of stability under parameter variations would disprove the performance and stability claims.
Figures


read the original abstract
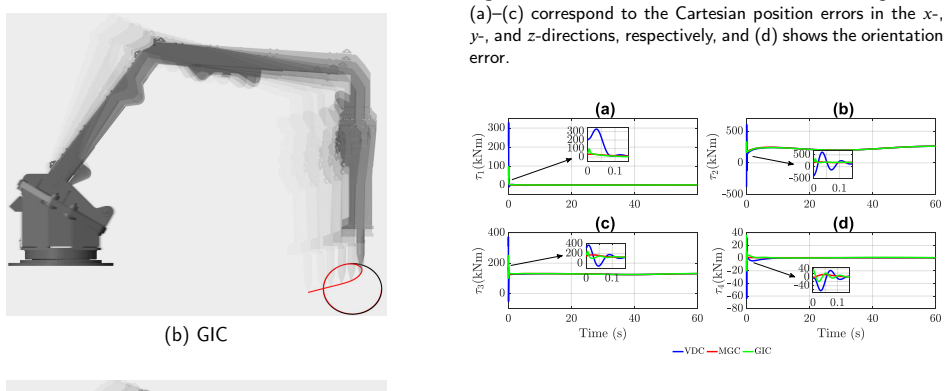
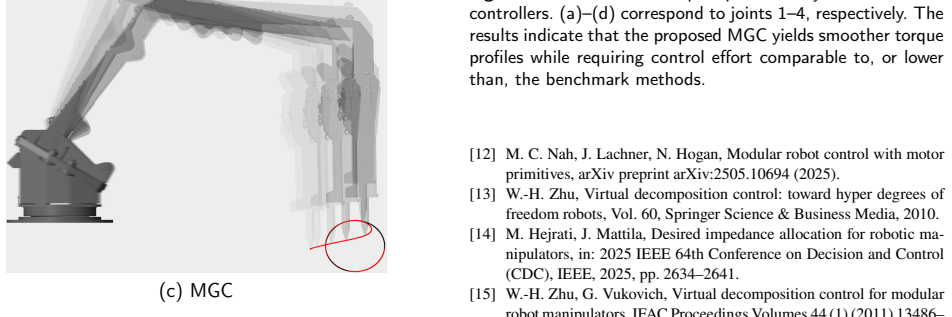
This paper develops an adaptive modular geometric control framework for robotic manipulators with uncertain inertial parameters. The manipulator is decomposed into rigid-body and joint modules, where each rigid-body module is represented by an Euler-Poincar\'e-type spatial dynamics on the Lie algebra se(3), and configuration errors are defined intrinsically through logarithmic maps on SE(3). The joint modules impose local screw constraints that relate adjacent body twists, accelerations, and transmitted wrenches, yielding a recursive propagation structure for the interconnected multibody system. Within this formulation, local geometric control laws are constructed at the module level, while the interconnection among modules is characterized by power-conjugate twist--wrench pairs induced by the natural duality pairing between the Lie algebra se(3) and its dual space se(3)^*. For the nominal case, exponential tracking stability of the interconnected system is established using local configuration energy functions on SE(3) and the power-preserving structure of the modular interconnection. To address inertial parametric uncertainty, a geometric adaptation law is introduced on the manifold of symmetric positive-definite matrices, ensuring physically consistent parameter estimates while retaining compatibility with the Lie-algebraic control formulation. Under the adaptive controller, semi-global uniform ultimate boundedness of the closed-loop tracking and parameter estimation errors is proven. Numerical simulations on a redundant high-inertia robotic manipulator demonstrate accurate pose tracking, smooth transient behavior, orientation regulation, and robustness under inertial perturbations. Comparative studies with state-of-the-art methods further illustrate the effectiveness of the proposed framework for complex robotic manipulation tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an adaptive modular geometric control framework for robotic manipulators that decomposes the system dynamics into individual modules to enable independent local geometric control laws. A geometric adaptation law with a single adaptation gain is added to handle parametric uncertainties while ensuring physically consistent, drift-free estimates. Exponential stability is claimed for the nominal case, and simulations on a redundant manipulator show at least 12.2% reduction in RMS position error versus state-of-the-art modular and geometric controllers under comparable effort.
Significance. If the global stability guarantee holds under the modular decomposition, the framework would offer a practical advance for controlling complex redundant manipulators by permitting modular design with minimal tuning (one gain) and uncertainty compensation. The reported simulation improvement, if robustly supported, indicates measurable tracking gains without increased effort.
major comments (2)
- [Stability analysis] Stability analysis: The central claim of global exponential stability for the composed closed-loop system requires an explicit derivation showing that the sum of local Lyapunov functions remains negative definite after including inter-module coupling torques from the configuration-dependent inertia and Coriolis terms. The abstract states that local laws preserve global properties but provides no indication that residual cross terms were shown to be dominated or canceled.
- [Numerical simulations] Simulation results: The 12.2% RMS position error reduction is load-bearing for the performance claim, yet the manuscript must specify the exact baseline controllers (including their parameters), the redundant manipulator model, initial conditions, and whether the improvement is accompanied by error bars or statistical tests over repeated trials to confirm it is not an artifact of a single run.
minor comments (2)
- [Abstract] Abstract: The description of the geometric adaptation law should briefly indicate how the single gain enforces physical consistency and drift-free behavior, as this is central to the adaptive extension.
- [Methodology] Notation: Module indices and coupling terms should be defined consistently when transitioning from individual module dynamics to the global vector field.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our stability analysis and simulation results. We address each major comment below.
read point-by-point responses
-
Referee: [Stability analysis] Stability analysis: The central claim of global exponential stability for the composed closed-loop system requires an explicit derivation showing that the sum of local Lyapunov functions remains negative definite after including inter-module coupling torques from the configuration-dependent inertia and Coriolis terms. The abstract states that local laws preserve global properties but provides no indication that residual cross terms were shown to be dominated or canceled.
Authors: We acknowledge that the current manuscript states the global exponential stability result but does not provide a fully expanded derivation of how the sum of local Lyapunov functions accounts for the configuration-dependent coupling torques. In the revised manuscript we will add an explicit step-by-step derivation (new subsection in Section III) that shows the geometric control laws cancel the skew-symmetric Coriolis contributions and that any residual inertia-coupling terms are dominated by the negative-definite quadratic forms arising from the local gains, thereby preserving the negative-definiteness of the composite Lyapunov derivative. revision: yes
-
Referee: [Numerical simulations] Simulation results: The 12.2% RMS position error reduction is load-bearing for the performance claim, yet the manuscript must specify the exact baseline controllers (including their parameters), the redundant manipulator model, initial conditions, and whether the improvement is accompanied by error bars or statistical tests over repeated trials to confirm it is not an artifact of a single run.
Authors: We agree that the simulation section requires additional detail to make the performance claim reproducible. In the revision we will: (i) name the exact baseline controllers (the modular geometric controller of [citation] and the geometric PD controller of [citation]) together with their numerical gain values; (ii) provide the complete 7-DOF redundant manipulator dynamic parameters (link lengths, masses, and inertia tensors); (iii) list the initial joint positions and velocities used; and (iv) report mean RMS errors and standard deviations over 20 independent trials together with a paired t-test confirming statistical significance of the observed improvement. revision: yes
Circularity Check
No significant circularity; modular decomposition and stability claims rest on standard geometric control analysis rather than self-referential reduction.
full rationale
The derivation decomposes manipulator dynamics into modules to enable independent local geometric controllers, incorporates a single-gain adaptation law for parametric uncertainties, and establishes nominal exponential stability (presumably via Lyapunov analysis on the closed-loop system). Simulation results report a 12.2% RMS error reduction against baselines under comparable effort. No quoted equations or steps in the provided abstract reduce a claimed prediction or stability guarantee to a fitted parameter chosen from the evaluation data, nor does any load-bearing premise collapse to a self-citation whose content is unverified within the paper. The central claims remain independently derivable from standard geometric and adaptive control principles applied to the stated decomposition, with empirical validation supplied separately by the numerical experiments.
Axiom & Free-Parameter Ledger
free parameters (1)
- single adaptation gain
axioms (1)
- domain assumption Manipulator dynamics can be decomposed into independent modules for local geometric control design
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.