Tight Convergence Rates for Online Distributed Linear Estimation with Adversarial Measurements
Pith reviewed 2026-05-10 18:59 UTC · model grok-4.3
The pith
A two-timescale ℓ1-minimization algorithm achieves tight non-asymptotic convergence rates for distributed mean estimation despite adversarial measurements when the sensing matrix satisfies a null-space property.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Under a null-space-property-like condition on the sensing matrix A, the two-timescale ℓ1-minimization algorithm recovers the exact mean E[X] at tight non-asymptotic rates despite adversarial measurements and asynchronous worker activations. Relaxed conditions on A are identified that still permit recovery of a projected component of E[X] even when full recovery fails. The analysis supplies explicit finite-time bounds that characterize robustness, identifiability, and statistical efficiency together.
What carries the argument
The two-timescale ℓ1-minimization algorithm, with slow updates on a consensus variable across workers and fast local ℓ1 minimization steps that tolerate corrupted measurements.
If this is right
- Explicit finite-time error bounds replace purely asymptotic statements for the same algorithm and matrix condition.
- Partial recovery of a projected mean remains possible under strictly weaker conditions on A.
- The same framework quantifies robustness, identifiability, and statistical efficiency in one finite-time analysis.
- The results apply directly to network tomography and other distributed linear sensing tasks with adversarial nodes.
Where Pith is reading between the lines
- The rates could be used to set practical stopping criteria or communication budgets in deployed sensor networks.
- Similar two-timescale structures may yield finite-time guarantees for other convex robust estimators under asynchrony.
- The relaxed matrix conditions suggest a hierarchy of identifiability results that could be tested on random or structured sensing matrices.
Load-bearing premise
The sensing matrix A must satisfy a null-space-property-like condition (or one of its relaxed variants) that controls the kernel and enables unique or partial recovery.
What would settle it
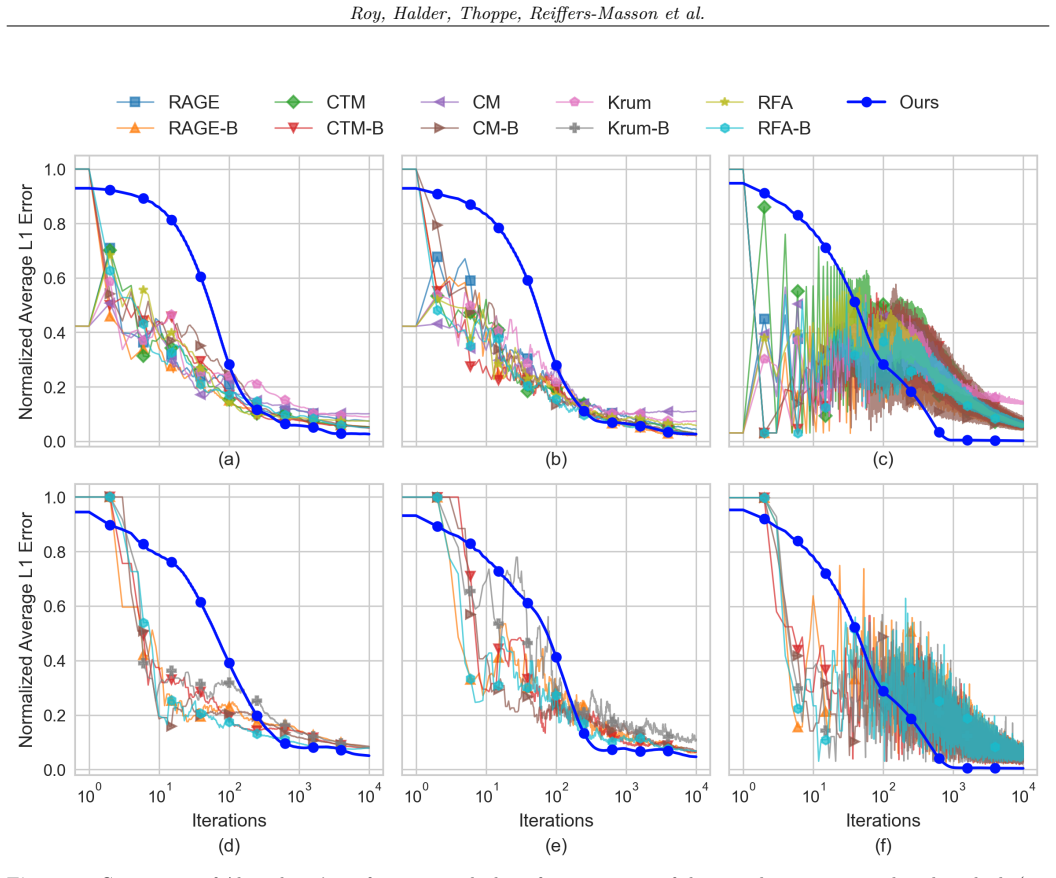
Numerical simulations in which the measured error decay rate deviates from the derived non-asymptotic bound while A satisfies the stated null-space condition, or in which full recovery occurs under a relaxed condition the analysis predicts should allow only projected recovery.
Figures
read the original abstract
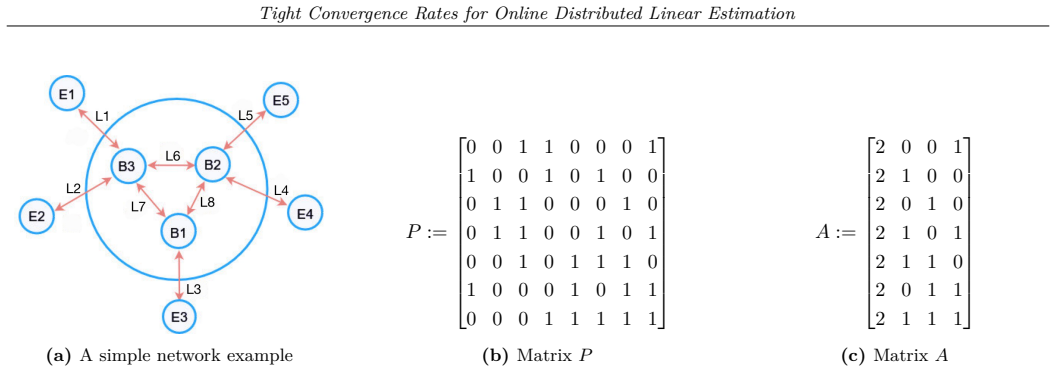
We study mean estimation of a random vector $X$ in a distributed parameter-server-worker setup. Worker $i$ observes samples of $a_i^\top X$, where $a_i^\top$ is the $i$th row of a known sensing matrix $A$. The key challenges are adversarial measurements and asynchrony: a fixed subset of workers may transmit corrupted measurements, and workers are activated asynchronously--only one is active at any time. In our previous work, we proposed a two-timescale $\ell_1$-minimization algorithm and established asymptotic recovery under a null-space-property-like condition on $A$. In this work, we establish tight non-asymptotic convergence rates under the same null-space-property-like condition. We also identify relaxed conditions on $A$ under which exact recovery may fail but recovery of a projected component of $\mathbb{E}[X]$ remains possible. Overall, our results provide a unified finite-time characterization of robustness, identifiability, and statistical efficiency in distributed linear estimation with adversarial workers, with implications for network tomography and related distributed sensing problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies distributed mean estimation of a random vector X where workers observe linear measurements a_i^T X from a known sensing matrix A. It considers challenges of a fixed adversarial subset of workers transmitting corrupted data and asynchronous activation (only one worker active at a time). Building on prior asymptotic recovery results under a null-space-property-like condition on A, the authors introduce a two-timescale ℓ1-minimization algorithm and derive tight non-asymptotic convergence rates. They further identify relaxed conditions on A under which exact recovery may fail but a projected component of E[X] can still be recovered, providing a unified finite-time view of robustness, identifiability, and efficiency with applications to network tomography.
Significance. If the non-asymptotic bounds hold, the work supplies precise finite-time rates whose leading terms recover the known asymptotic behavior, together with explicit relaxed identifiability conditions. This advances the literature on robust distributed linear estimation by integrating asynchrony and fixed adversarial subsets into a single Lyapunov-style analysis without circular steps. The results are relevant for practical distributed sensing problems where finite-time guarantees and partial recovery are needed.
minor comments (2)
- The abstract and introduction refer to 'tight' rates; a brief remark in the main text (near the statement of the main theorem) clarifying how the leading constants match the prior asymptotic rate would strengthen the tightness claim.
- Notation for the two timescales and the projection operator in the relaxed-identifiability section could be introduced earlier or cross-referenced to avoid minor confusion for readers unfamiliar with the prior work.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of our manuscript on tight non-asymptotic convergence rates for online distributed linear estimation under adversarial measurements and asynchrony. The recommendation for minor revision is appreciated. No specific major comments were raised in the report, so we will incorporate any minor editorial suggestions in the revised version.
Circularity Check
Minor self-citation for prior algorithm; new finite-time analysis is independent
full rationale
The paper cites its own prior work only to recall the two-timescale ℓ1 algorithm and the asymptotic recovery result under the NSP-like condition on A. The central contribution—tight non-asymptotic convergence rates—is derived via a new Lyapunov-style analysis that directly incorporates asynchrony, single-active-worker scheduling, and the fixed adversarial subset. This analysis does not reduce any claimed rate to a fitted parameter, a self-definition, or a prior result by construction; the leading terms recover the known asymptotic rate as a consistency check rather than as an input. Relaxed identifiability conditions are stated explicitly as weakenings of the NSP and are shown to suffice for projected recovery without circularity. No load-bearing step collapses to self-citation or renaming.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption null-space-property-like condition on the sensing matrix A
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
under a Nullspace-Property (NSP)-like condition on A (see (4)), it guarantees exact recovery of EX despite adversarial corruption... η:= min_S:|S|=m min_x≠0 1/N∥x∥ [∑_{j∈S^c} |a_j^⊤ x| − ∑_{j∈S} |a_j^⊤ x|]
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
two-timescale ℓ1-minimization algorithm... xn+1 = Π_X (xn + α_n a_i sign(y_n(i) − a_i^⊤ x_n))
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
relaxed conditions on A under which exact recovery may fail but recovery of a projected component of E[X] remains possible
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
PMLR, 2018. D. Data and S. Diggavi. Byzantine-resilient sgd in high dimen- sions on heterogeneous data. In2021 IEEE International Symposium on Information Theory (ISIT), pages 2310–2315. IEEE, 2021. D. Data, L. Song, and S. Diggavi. Data encoding methods for byzantine-resilient distributed optimization. In2019 IEEE international symposium on information t...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.