From Cut-In to Rated: Multi-Region Floating Offshore Wind Farm Control for Secondary Frequency Regulation
Pith reviewed 2026-05-10 17:41 UTC · model grok-4.3
The pith
A multi-region controller with sigmoid blending lets floating offshore wind farms track power for secondary frequency regulation across wind speeds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
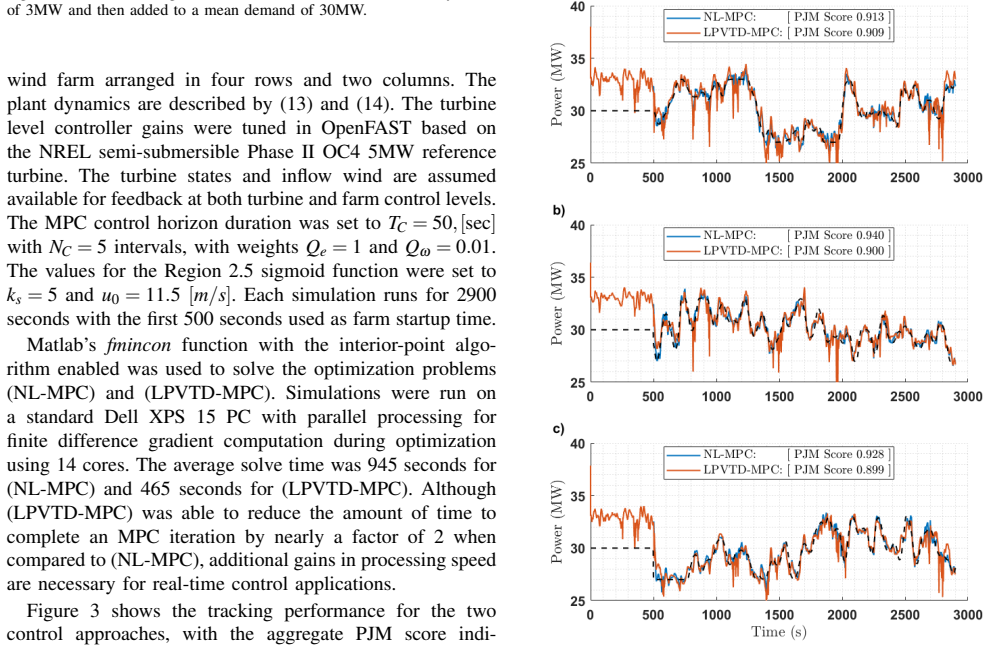
The paper establishes that a multi-region torque and pitch controller with sigmoid blending, combined with either nonlinear model predictive control using a dynamic wake model or a reduced-order linear parameter varying model predictive control with time-delay wake advection, enables floating offshore wind farms to achieve at least 89.9 percent scores on PJM secondary frequency regulation certification tests across three inlet wind scenarios, exceeding the 75 percent qualification threshold, while the reduced-order method solves the problem in under half the computation time at the cost of slightly larger farm power fluctuations.
What carries the argument
Sigmoid-weighted blending between Region 2 generator torque control and Region 3 PI-LQR blade pitch control, integrated into nonlinear or linear parameter varying model predictive controllers that incorporate dynamic or time-delay wake models for coordinated farm power tracking.
If this is right
- Both the full nonlinear and reduced-order predictive controllers qualify the farm for secondary frequency regulation market participation.
- The linear parameter varying time-delay method solves the control problem in less than half the time of the nonlinear approach.
- Multi-region strategies are required for floating turbines because wave motions cause large wind speed variations that span operating regions.
- The framework addresses market-driven power tracking together with individual turbine dynamics in the floating setting.
Where Pith is reading between the lines
- The computational savings of the reduced-order controller could support real-time deployment on larger farms where full nonlinear optimization becomes prohibitive.
- Similar blending and predictive methods might extend to other ancillary services such as primary frequency response or voltage support.
- Field validation under broader wave and turbulence conditions would test whether the modeled wake advection times remain accurate.
Load-bearing premise
The dynamic wake models and linear parameter-varying approximations accurately represent real floating turbine interactions and wake advection under the tested wind conditions, and the sigmoid blending introduces no destabilizing transients across region transitions.
What would settle it
A field measurement on an actual floating wind farm showing power tracking scores below 75 percent or unstable transients during region transitions under wave-induced platform pitching would falsify the performance claims.
Figures
read the original abstract
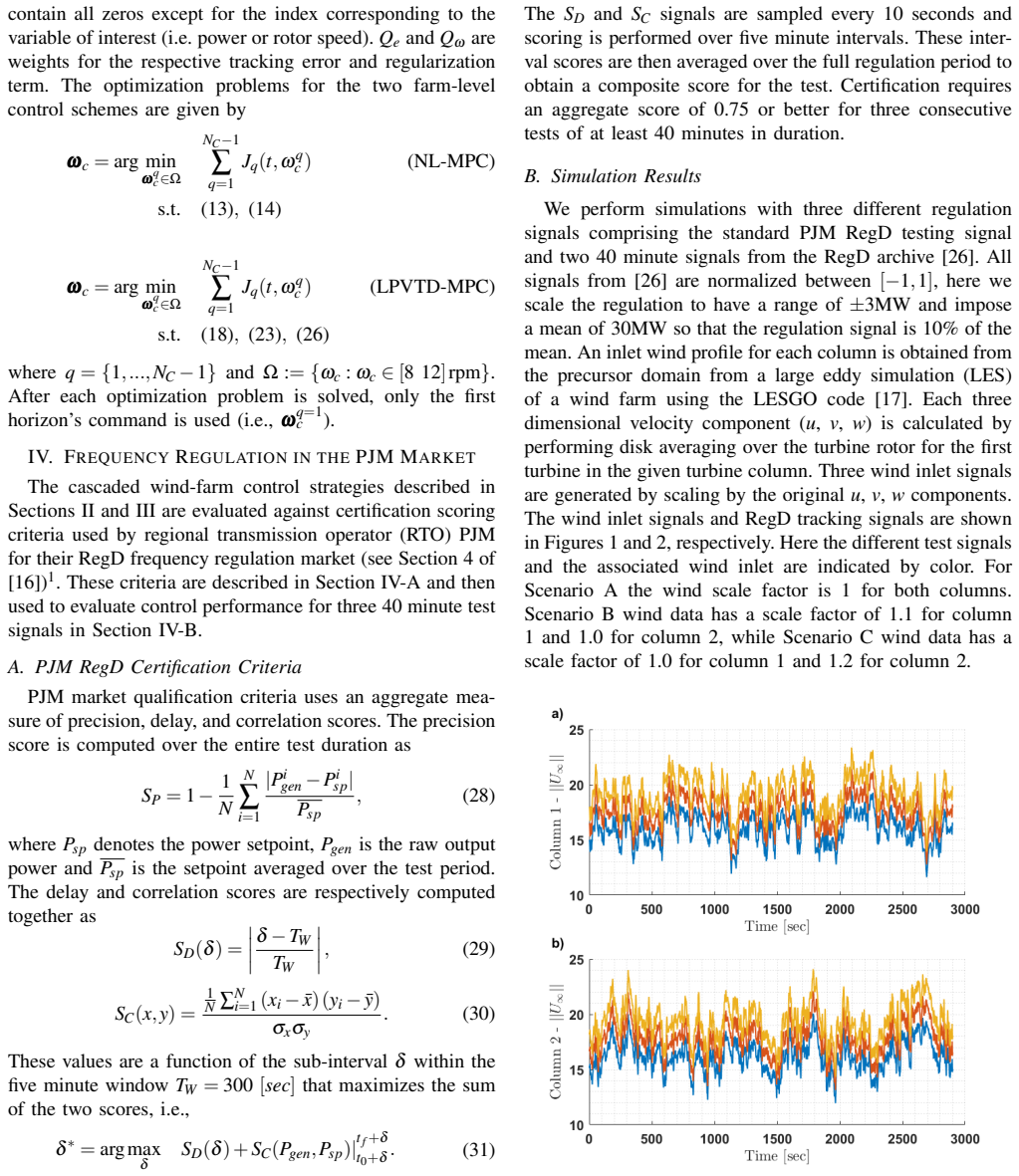
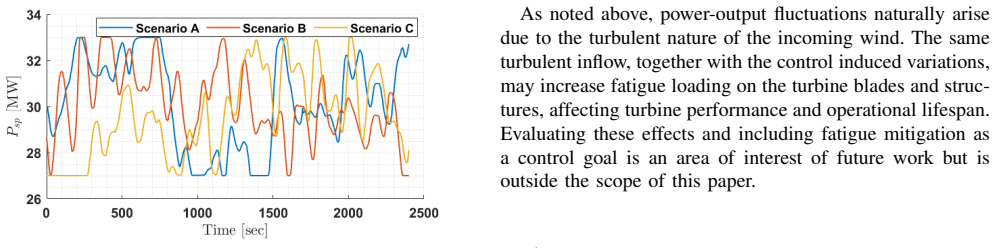
This paper describes a multi-region control framework for floating offshore wind farms. Specifically, we propose a novel generator torque controller that regulates rotor speed in Region 2, corresponding to wind speeds between the cut-in and rated values. In Region 3 (wind speeds at or above rated but below cut-out speed) we employ a PI-LQR for collective blade pitch. Control blending across the transitional wind speeds (Region 2.5) employs a sigmoid weighting function applied to the control variables. Two modeling paradigms are proposed for farm-level power tracking with rotor speed regularization: a nonlinear model predictive controller (NL-MPC) with a dynamic wake model, and a reduced order model predictive controller based on linear parameter varying turbine models with a time delay representation of wake advection (LPVTD-MPC). These approaches are evaluated over three wind inlet conditions using the PJM ancillary service certification criteria for participation in a secondary frequency regulation market. Results show that both approaches achieve scores of at least 89.9\% for the three different testing scenarios, which are well above the qualification threshold of 75\%. However, the LPVTD-MPC approach solves the problem in under half the time versus NL-MPC but with slightly larger fluctuations in farm-level power output, highlighting the trade-off between performance and computational tractability. The control framework is among the first to address multi-region wind turbine dynamics together with market driven power tracking objectives for floating offshore wind farms. Such multi-region control becomes increasingly necessary in the floating turbine setting where large (region spanning) wind speed variations are common due to wave induced platform pitching.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a multi-region control framework for floating offshore wind farms targeting secondary frequency regulation market participation. A generator torque controller regulates rotor speed in Region 2 (cut-in to rated), a PI-LQR handles collective blade pitch in Region 3 (rated to cut-out), and a sigmoid weighting function blends commands across the transitional Region 2.5. Two farm-level power-tracking controllers are developed: a nonlinear MPC (NL-MPC) incorporating a dynamic wake model, and an LPVTD-MPC using linear parameter-varying turbine models with time-delay wake advection. Both are tested in simulation under three wind-inlet profiles and evaluated using PJM ancillary-service certification criteria; both achieve at least 89.9% scores (above the 75% qualification threshold), with LPVTD-MPC solving in under half the time of NL-MPC at the cost of modestly larger farm power fluctuations. The work positions itself as among the first to combine multi-region floating-turbine dynamics with market-driven objectives.
Significance. If the underlying dynamic-wake and LPV models remain accurate under floating-platform motions and the sigmoid blending proves stable, the results demonstrate a concrete route for floating farms to qualify for secondary frequency regulation while respecting region-specific actuator limits. The explicit performance-compute trade-off between NL-MPC and LPVTD-MPC supplies actionable guidance for real-time implementation, and the use of an external PJM benchmark rather than self-defined metrics strengthens the practical relevance of the reported scores.
major comments (2)
- The headline performance (≥89.9% on PJM criteria across three inlet cases) is obtained inside a closed simulation loop in which the plant model is identical to the model used for controller synthesis. This setup does not test robustness to wake-model mismatch, wave-induced platform-pitch disturbances, or advection-delay variations that are characteristic of floating turbines; such tests are load-bearing for any claim that the controllers can support real-market qualification.
- No explicit stability or transient analysis is provided for the sigmoid blending at the Region 2–2.5–3 boundaries under the large wind-speed excursions typical of floating platforms. Because the multi-region architecture is central to the paper’s novelty, the absence of such analysis leaves open the possibility of destabilizing command jumps.
minor comments (2)
- The abstract states that LPVTD-MPC solves “in under half the time” but supplies no absolute CPU times, solver settings, or hardware specification; adding these numbers would make the claimed computational advantage reproducible.
- The manuscript would benefit from a short table or paragraph contrasting the modeling assumptions (dynamic wake vs. LPVTD) with the specific floating-turbine effects (platform pitch, wave loading) that each approximation omits.
Simulated Author's Rebuttal
We thank the referee for the constructive comments that emphasize robustness and stability considerations essential for real-world deployment of the proposed multi-region controllers. We respond point-by-point below and indicate where revisions will be made.
read point-by-point responses
-
Referee: The headline performance (≥89.9% on PJM criteria across three inlet cases) is obtained inside a closed simulation loop in which the plant model is identical to the model used for controller synthesis. This setup does not test robustness to wake-model mismatch, wave-induced platform-pitch disturbances, or advection-delay variations that are characteristic of floating turbines; such tests are load-bearing for any claim that the controllers can support real-market qualification.
Authors: We agree that identical plant-controller models provide only an initial validation and do not fully capture robustness to wake-model mismatch or unmodeled wave-induced effects. The manuscript already incorporates floating-platform dynamics and wave-induced pitching into the turbine models, but does not include explicit mismatch or disturbance-rejection tests. In the revised version we will add a dedicated subsection presenting sensitivity results to moderate wake-parameter variations and a discussion of how platform-pitch excursions affect advection delays, thereby strengthening the practical claims while acknowledging that exhaustive Monte-Carlo robustness studies remain future work. revision: partial
-
Referee: No explicit stability or transient analysis is provided for the sigmoid blending at the Region 2–2.5–3 boundaries under the large wind-speed excursions typical of floating platforms. Because the multi-region architecture is central to the paper’s novelty, the absence of such analysis leaves open the possibility of destabilizing command jumps.
Authors: The sigmoid weighting is constructed to guarantee continuity of both torque and pitch commands at the region boundaries. Nevertheless, we acknowledge that no dedicated stability or transient analysis under large, rapid wind-speed changes is supplied. In the revision we will insert a new analysis subsection that (i) proves command continuity and boundedness of the blended inputs, (ii) presents additional simulation trajectories of rotor speed and farm power during representative platform-pitch-induced excursions, and (iii) discusses the absence of observed jumps, thereby directly addressing the concern for the central multi-region contribution. revision: yes
Circularity Check
No circularity: performance measured on external PJM criteria with standard MPC/LQR designs
full rationale
The paper's central results are simulation-based performance scores (≥89.9% on PJM secondary-frequency regulation criteria) obtained from NL-MPC and LPVTD-MPC controllers. These controllers follow standard model-predictive and LQR synthesis procedures applied to dynamic-wake and LPV turbine models; the reported qualification scores are computed against an independent external benchmark (PJM 75% threshold) rather than any self-defined or fitted metric. No derivation step reduces by construction to its inputs, no self-citation is load-bearing for the performance claim, and the sigmoid blending is presented as an engineering choice without being smuggled in via prior self-work. The modeling assumptions are open to external validation but do not create circularity in the reported chain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Linear parameter-varying approximations and time-delay wake models sufficiently capture floating turbine dynamics and advection for the tested conditions.
- domain assumption Sigmoid weighting produces stable transitions between Region 2 torque control and Region 3 pitch control.
Reference graph
Works this paper leans on
-
[1]
Overview and meteorological validation of the wind integration national dataset toolkit,
C. Draxl, B. Hodge, A. Clifton, and J. McCaa, “Overview and meteorological validation of the wind integration national dataset toolkit,” 2015. NREL/TP-5000-61740
work page 2015
-
[2]
L. Y . Pao and K. E. Johnson, “Control of wind turbines,”IEEE Control Syst. Magazine, vol. 31, no. 2, pp. 44–62, 2011
work page 2011
-
[3]
Analysis of power- maximizing region 2 controllers for wind and marine turbines,
D. Stockhouse, D. Zalkind, H. Ross, and L. Pao, “Analysis of power- maximizing region 2 controllers for wind and marine turbines,”J. Physics: Conf. Series, vol. 2767, no. 3, p. 032051, 2024
work page 2024
-
[4]
K. Johnson, L. Pao, M. Balas, and L. Fingersh, “Control of variable- speed wind turbines: standard and adaptive techniques for maximizing energy capture,”IEEE Control Syst. Magazine, vol. 26, no. 3, pp. 70– 81, 2006
work page 2006
-
[5]
A reference open- source controller for fixed and floating offshore wind turbines,
N. J. Abbas, D. S. Zalkind, L. Pao, and A. Wright, “A reference open- source controller for fixed and floating offshore wind turbines,”Wind Energy Science, vol. 7, no. 1, pp. 53–73, 2022
work page 2022
-
[6]
J. A. Frederik, E. Simley, K. A. Brown, G. R. Yalla, L. C. Cheung, and P. A. Fleming, “Comparison of wind-farm control strategies under realistic offshore wind conditions: turbine quantities of interest,”Wind Energy Science, vol. 2024, pp. 1–33, 2024
work page 2024
-
[7]
Model-based receding horizon control of wind farms for sec- ondary frequency regulation,
C. R. Shapiro, P. Bauweraerts, J. Meyers, C. Meneveau, and D. F. Gayme, “Model-based receding horizon control of wind farms for sec- ondary frequency regulation,”Wind Energy, vol. 20, no. 7, pp. 1261– 1275, 2017
work page 2017
-
[8]
Turbulence and control of wind farms,
C. R. Shapiro, G. M. Starke, and D. F. Gayme, “Turbulence and control of wind farms,”Annu. Rev. Control Robot. Auton. Syst., vol. 5, no. V olume 5, 2022, pp. 579–602, 2022
work page 2022
-
[9]
Computational fluid dynamics simulation study of active power control in wind plants,
P. Fleming, J. Aho, P. Gebraad, L. Pao, and Y . Zhang, “Computational fluid dynamics simulation study of active power control in wind plants,” inProc. American Control Conf., pp. 1413–1420, 2016
work page 2016
-
[10]
Optimal coordinated control of power extraction in LES of a wind farm with entrance effects,
J. P. Goit, W. Munters, and J. Meyers, “Optimal coordinated control of power extraction in LES of a wind farm with entrance effects,” Energies, vol. 9, no. 1, 2016
work page 2016
-
[11]
Active power control of waked wind farms,
J.-W. van Wingerden, L. Pao, J. Aho, and P. Fleming, “Active power control of waked wind farms,”IFAC-PapersOnLine, vol. 50, no. 1, pp. 4484–4491, 2017
work page 2017
-
[12]
Comparison and testing of power reserve control strategies for grid-connected wind turbines,
Y . Jeong, K. Johnson, and P. Fleming, “Comparison and testing of power reserve control strategies for grid-connected wind turbines,” Wind Energy, vol. 17, no. 3, pp. 343–358, 2014
work page 2014
-
[13]
Active power controls from wind power: Bridging the gaps,
E. Ela, V . Gevorgian, P. Fleming, Y . Zhang, M. Singh, E. Muljadi, A. Scholbrook, J. Aho, A. Buckspan, L. Pao,et al., “Active power controls from wind power: Bridging the gaps,” 2014. NREL/TP-5D00- 60574
work page 2014
-
[14]
Constrained wind turbine power control,
D. S. Zalkind and L. Y . Pao, “Constrained wind turbine power control,” inProc. American Control Conf., pp. 3494–3499, 2019
work page 2019
-
[15]
Towards collective control of floating offshore wind farms,
S. Ampleman, M. Ayala, and D. F. Gayme, “Towards collective control of floating offshore wind farms,” inProc. American Control Conf., pp. 1508–1514, 2025
work page 2025
- [16]
-
[17]
Lesgo: A parallel pseudo-spectral large-eddy simulation code
“Lesgo: A parallel pseudo-spectral large-eddy simulation code.” https://lesgo.me.jhu.edu. Accessed: 2024-10-02
work page 2024
-
[18]
T. J. Larsen and T. D. Hanson, “A method to avoid negative damped low frequent tower vibrations for a floating, pitch controlled wind turbine,”J. Physics: Conf. Series, vol. 75, no. 1, p. 012073, 2007
work page 2007
-
[19]
Influence of control on the pitch damping of a floating wind turbine: AIAA paper no. 2008-1306,
J. Jonkman, “Influence of control on the pitch damping of a floating wind turbine: AIAA paper no. 2008-1306,” inProc. 46th AIAA Aerosp. Sciences Meeting and Exhibit, 2008
work page 2008
-
[20]
Physics-based 3-d control-oriented modeling of floating wind turbines,
J. R. Homer and R. Nagamune, “Physics-based 3-d control-oriented modeling of floating wind turbines,”IEEE Trans. Control Syst. Tech- nol., vol. 26, no. 1, pp. 14–26, 2018
work page 2018
-
[21]
Dynamics modeling and loads analysis of an offshore floating wind turbine,
J. Jonkman, “Dynamics modeling and loads analysis of an offshore floating wind turbine,” 2007. NREL/TP-500-41958
work page 2007
-
[22]
Definition of the semisubmersible floating system for Phase II of OC4,
A. Robertson, J. Jonkman, A. Goupee, A. Coulling, and C. Luan, “Definition of the semisubmersible floating system for Phase II of OC4,” 2014. NREL/TP-5000-60601
work page 2014
-
[23]
A wake modeling paradigm for wind farm design and control,
C. R. Shapiro, G. M. Starke, C. Meneveau, and D. F. Gayme, “A wake modeling paradigm for wind farm design and control,”Energies, vol. 12, no. 15, 2019
work page 2019
-
[24]
A. C. Kheirabadi and R. Nagamune, “A low-fidelity dynamic wind farm model for simulating time-varying wind conditions and floating platform motion,”Ocean Engineering, vol. 234, p. 109313, 2021
work page 2021
-
[25]
Network based estimation of wind farm power and velocity data under changing wind direction,
G. M. Starke, P. Stanfel, C. Meneveau, D. F. Gayme, and J. King, “Network based estimation of wind farm power and velocity data under changing wind direction,” inProc. American Control Conf., pp. 1803–1810, 2021
work page 2021
-
[26]
PJM: Markets and operations, ancillary services
“PJM: Markets and operations, ancillary services.” https://www.pjm.com/markets-and-operations/ ancillary-services. Accessed: 2025-09-19
work page 2025
-
[27]
Behavior and mechanisms of doppler wind lidar error in varying stability regimes,
R. Robey and J. K. Lundquist, “Behavior and mechanisms of doppler wind lidar error in varying stability regimes,”Atmos. Meas. Tech., vol. 15, no. 15, pp. 4585–4622, 2022
work page 2022
-
[28]
W. Munters and J. Meyers, “Dynamic strategies for yaw and induction control of wind farms based on large-eddy simulation and optimiza- tion,”Energies, vol. 11, no. 1, 2018
work page 2018
-
[29]
Adjoint optimisation for wind farm flow control with a free-vortex wake model,
M. J. van den Broek, D. De Tavernier, B. Sanderse, and J.-W. van Wingerden, “Adjoint optimisation for wind farm flow control with a free-vortex wake model,”Renewable Energy, vol. 201, pp. 752–765, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.