Asymptotically Stable Gait Generation and Instantaneous Walkability Determination for Planar Almost Linear Biped with Knees
Pith reviewed 2026-05-10 16:14 UTC · model grok-4.3
The pith
A linear approximation of gravity in the knee biped model enables instantaneous calculation of future states and walkability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By deriving the equations of motion for a planar 6-DOF biped with knees, reducing to 3-DOF, and approximating the gravity term linearly around the thigh frame angle, the model permits state-space realization and discretization. This allows iterative calculation for instantaneous walkability determination while generating asymptotically stable gaits on level ground.
What carries the argument
The linearized 3-DOF model from Taylor expansion of the gravity term around the thigh frame angle, which carries the argument by enabling fast state prediction without integration.
If this is right
- Stable bipedal gaits can be numerically generated using the control system on the linearized model.
- Future states and walkability can be determined in negligible computation time.
- Accuracy of the approximation depends on the knee flexion angle and chosen expansion point.
- Small steps introduce issues for the linear approximation when descending.
Where Pith is reading between the lines
- The method could extend to real-time control on physical robots by avoiding heavy simulation.
- Choosing the expansion point optimally might improve accuracy for varied terrains beyond small steps.
- Similar linearizations could apply to other joint configurations if inertia remains constant.
Load-bearing premise
The linear approximation of the gravity term around the thigh frame angle stays accurate enough for the knee flexion angles that occur during the gait, even on small steps.
What would settle it
Run a full nonlinear simulation of a generated gait and compare the predicted future states from the linearized discrete model; if the positions or velocities diverge significantly within one step, the claim fails.
Figures

read the original abstract
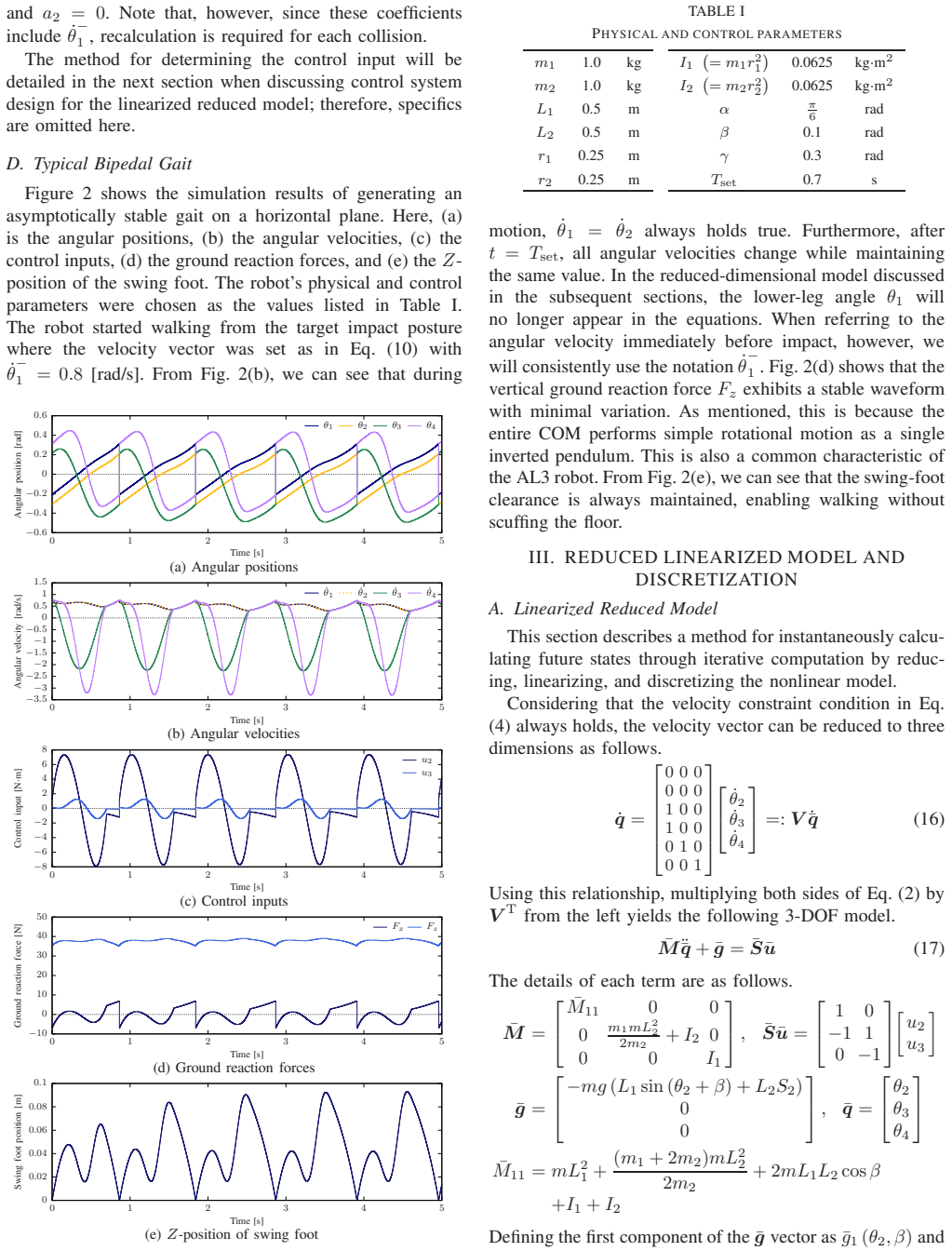
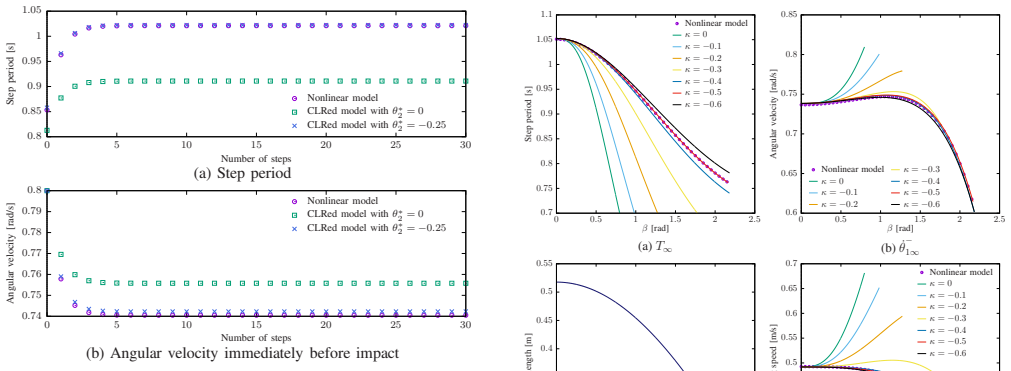
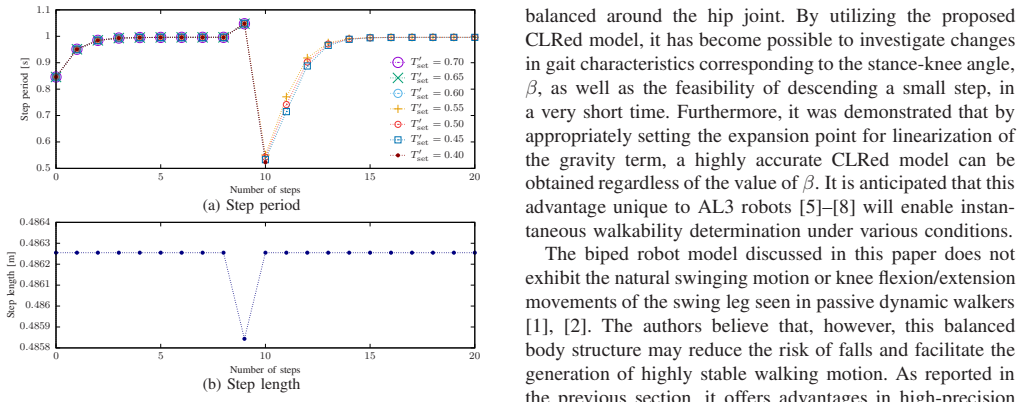
A class of planar bipedal robots with unique mechanical properties has been proposed, where all links are balanced around the hip joint, preventing natural swinging motion due to gravity. A common property of their equations of motion is that the inertia matrix is a constant matrix, there are no nonlinear velocity terms, and the gravity term contains simple nonlinear terms. By performing a Taylor expansion of the gravity term and making a linear approximation, it is easy to derive a linearized model, and calculations for future states or walkability determination can be performed instantaneously without the need for numerical integration. This paper extends the method to a planar biped robot model with knees. First, we derive the equations of motion, constraint conditions, and inelastic collisions for a planar 6-DOF biped robot, design its control system, and numerically generate a stable bipedal gait on a horizontal plane. Next, we reduce the equations of motion to a 3-DOF model, and derive a linearized model by approximating the gravity term as linear around the expansion point for the thigh frame angle. Through numerical simulations, we demonstrate that calculations for future states and walkability determination can be completed in negligible time. By applying control inputs to the obtained model, performing state-space realization, and then discretizing it, instantaneous walkability determination through iterative calculation becomes possible. Through detailed gait analysis, we discuss how the knee joint flexion angle and the expansion point affect the accuracy of the linear approximation, and the issues that arise when descending a small step.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an approach for asymptotically stable gait generation and fast walkability determination in a planar biped with knees exhibiting almost-linear dynamics. The authors derive the full 6-DOF equations of motion, reduce them to a 3-DOF model, perform a linear approximation of the gravity vector around a fixed thigh-frame angle, obtain a state-space realization, discretize the system, and use iterative forward simulation for instantaneous walkability checks. Numerical examples demonstrate stable gait generation on level ground and discuss the impact of knee flexion on approximation accuracy, including for small steps.
Significance. If the linear gravity approximation proves sufficiently accurate over the operating range of knee angles, the method offers a computationally efficient alternative to full nonlinear integration for real-time locomotion planning. The numerical results on gait stability and computation time are promising, but the absence of quantitative validation metrics against the nonlinear model weakens the assessment of practical utility.
major comments (2)
- Linearized model derivation (following reduction to 3-DOF): the first-order Taylor expansion is applied only to the thigh-frame angle while gravity terms depend on both thigh and knee angles; without an explicit remainder bound or sensitivity analysis over the observed knee-flexion range (especially for small steps), the accuracy of the discrete linear model for walkability decisions is not rigorously established.
- Numerical simulations section: stable gaits are generated and computation times reported as negligible, yet no quantitative error metrics (e.g., trajectory L2 norms, state-prediction discrepancies, or walkability-decision mismatch rates) are given comparing the discretized linear model to forward integration of the original nonlinear 6-DOF system, which is load-bearing for the central claim of reliable instantaneous determination.
minor comments (2)
- Abstract and gait-analysis discussion: the choice of fixed expansion point for the thigh angle is not justified with a selection criterion or adaptation strategy, and its interaction with varying knee flexion should be clarified for reproducibility.
- The manuscript would benefit from a table summarizing computation times, approximation errors (if any), and knee-angle ranges across the reported gaits.
Simulated Author's Rebuttal
We are grateful to the referee for the constructive and detailed review of our manuscript. The comments correctly identify areas where additional rigor would strengthen the presentation of the linear approximation and its validation. We address each major comment below and will incorporate revisions to provide the requested analysis and metrics.
read point-by-point responses
-
Referee: Linearized model derivation (following reduction to 3-DOF): the first-order Taylor expansion is applied only to the thigh-frame angle while gravity terms depend on both thigh and knee angles; without an explicit remainder bound or sensitivity analysis over the observed knee-flexion range (especially for small steps), the accuracy of the discrete linear model for walkability decisions is not rigorously established.
Authors: In the reduced 3-DOF model the knee angle enters the gravity vector as a configuration variable, and the first-order expansion is performed with respect to the thigh angle at a chosen operating point. The manuscript already contains a discussion of how knee flexion and the expansion point affect approximation accuracy, including explicit remarks on small-step cases. We agree, however, that an explicit remainder bound and systematic sensitivity analysis are absent. In the revision we will add a dedicated paragraph deriving a Lagrange remainder estimate for the gravity term over the observed knee-angle range and include sensitivity plots of the approximation error versus knee flexion. revision: yes
-
Referee: Numerical simulations section: stable gaits are generated and computation times reported as negligible, yet no quantitative error metrics (e.g., trajectory L2 norms, state-prediction discrepancies, or walkability-decision mismatch rates) are given comparing the discretized linear model to forward integration of the original nonlinear 6-DOF system, which is load-bearing for the central claim of reliable instantaneous determination.
Authors: The numerical section demonstrates stable gaits, negligible run times, and qualitative effects of knee flexion on accuracy, but does not supply direct quantitative comparisons against the full nonlinear 6-DOF integration. We accept that such metrics are necessary to substantiate the reliability claim for instantaneous walkability determination. In the revised manuscript we will add a new table and accompanying text reporting L2 trajectory errors, maximum state-prediction discrepancies over multiple steps, and walkability-decision agreement rates between the discretized linear model and nonlinear forward integration for the level-ground and small-step cases already presented. revision: yes
Circularity Check
No significant circularity; derivations from standard rigid-body mechanics with explicit approximation
full rationale
The paper starts from the balanced-link property and derives the 6-DOF equations of motion, constraint conditions, and collision models using standard Lagrangian mechanics. It then reduces to a 3-DOF model and applies an explicit first-order Taylor expansion to linearize only the gravity vector around a chosen thigh-frame angle. This linearized model is realized in state-space form, discretized, and iterated for walkability; the approximation is presented as such and its accuracy is assessed via separate numerical gait simulations rather than being tautologically defined by the walkability output. No parameters are fitted to data and relabeled as predictions, no uniqueness theorem is imported from self-citation to force the result, and the central claim (instantaneous walkability via the discrete linear model) follows directly from the stated approximation without reducing to its own inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- expansion point for thigh frame angle
axioms (1)
- domain assumption Inertia matrix is constant and nonlinear velocity terms are absent because all links are balanced around the hip joint
Reference graph
Works this paper leans on
-
[1]
11em plus .33em minus .07em @technote 4000 4000 100 4000 4000 500 `\.=1000 = #1 #1 #1 0pt [0pt][0pt] #1 * \| ** #1 \@IEEEauthorblockNstyle \@IEEEauthorblockAstyle \@IEEEauthordefaulttextstyle \@IEEEauthorblockconfadjspace -0.25em \@IEEEauthorblockNtopspace 0.0ex \@IEEEauthorblockAtopspace 0.0ex \@IEEEauthorblockNinterlinespace 2.6ex \@IEEEauthorblockAinte...
work page 2026
-
[2]
McGeer, ``Passive dynamic walking,'' Int
T. McGeer, ``Passive dynamic walking,'' Int. J. of Robotics Research , Vol. 9, Iss. 2, pp. 62--82, 1990
work page 1990
-
[3]
McGeer, ``Passive walking with knees,'' Proc
T. McGeer, ``Passive walking with knees,'' Proc. of the IEEE Int. Conf. on Robotics and Automation , Vol. 3, pp. 1640--1645, 1990
work page 1990
-
[4]
J. W. Grizzle, G. Abba and F. Plestan. ``Asymptotically stable walking for biped robots: Analysis via systems with impulse effects,'' IEEE Trans. on Automatic Control , Vol. 46, Iss. 1, pp. 51--64, 2001
work page 2001
-
[5]
E. R. Westervelt, J. W. Grizzle, C. Chevallereau, J. H. Choi, and B. Morris, Feedback Control of Dynamic Bipedal Robot Locomotion , CRC Press, 2007
work page 2007
-
[6]
J. Kiefer and B. Ramesh, ``Walking viability and gait synthesis for a novel class of dynamically-simple bipeds.'' Informatica , Vol. 17, Iss. 2, pp. 145--155, 1993
work page 1993
-
[7]
M. W. Spong, R. Lozano and R. Mahony, ``An almost linear biped,'' Proc. of the 39th IEEE Conf. on Decision and Control , pp. 4803--4808, 2000
work page 2000
-
[8]
S. K. Agrawal and A. Fattah, ``Motion control of a novel planar biped with nearly linear dynamics,'' IEEE/ASME Trans. on Mechatronics , Vol. 11, Iss. 2, pp. 162--168, 2006
work page 2006
-
[9]
V. Sangwan and S. K. Agrawal, ``Differentially flat design of bipeds ensuring limit cycles,'' IEEE/ASME Trans. on Mechatronics , Vol. 14, Iss. 6, pp. 647--657, 2009
work page 2009
-
[10]
F. Asano, ``A novel generation method for underactuated bipedal gait with landing position control of swing leg based on property of zero dynamics,'' Proc. of the IEEE Int. Conf. on Advanced Intelligent Mechatronics , pp. 1184-1189, 2015
work page 2015
- [11]
-
[12]
F. Jenelten, R. Grandia, F. Farshidian and M. Hutter, ``TAMOLS: Terrain-aware motion optimization for legged systems,'' IEEE Trans. on Robotics , Vol. 38, Iss. 6, pp. 3395--3413, 2022
work page 2022
-
[13]
F. Asano, ``Stability analysis of underactuated compass gait based on linearization of motion,'' Multibody System Dynamics , Vol. 33, Iss. 1, pp. 93--111, 2015
work page 2015
-
[14]
F. Asano, ``Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture,'' Multibody System Dynamics , Vol. 35, Iss. 2, pp. 191--213, 2015
work page 2015
-
[15]
M. J. Coleman, ``Dynamics and stability of a rimless spoked wheel: a simple 2D system with impacts,'' Dynamical Systems , Vol. 25, Iss. 2, pp. 215--238, 2010
work page 2010
-
[16]
M. J. Coleman, A. Chatterjee and A. Ruina, ``Motions of a rimless spoked wheel: a simple three-dimensional system with impacts,'' Dynamics and Stability of Systems , Vol. 12, Iss. 3, pp. 139--159, 1997
work page 1997
-
[17]
Asano, ``Stability principle underlying passive dynamic walking of rimless wheel,'' Proc
F. Asano, ``Stability principle underlying passive dynamic walking of rimless wheel,'' Proc. of the IEEE Int. Conf. on Control Applications , pp. 1039--1044, 2012
work page 2012
-
[18]
T. G. McGee and M. W. Spong, ``Trajectory planning and control of a novel walking biped,'' Proc. of the IEEE Int. Conf. on Control Applications , pp. 1099--1104, 2001
work page 2001
-
[19]
F. Asano and Y. Zheng, ``High-speed and energy-efficient collisionless walking of underactuated rimless wheel,'' Artificial Life and Robotics , Vol. 23, Iss. 4, pp. 523--531, 2018
work page 2018
- [20]
-
[21]
F. Asano and T. Sedoguchi, ``Instantaneous walkability determination method for almost linear passive dynamic walkers with non-trivial limit cycle stability,'' Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems , 2025
work page 2025
-
[22]
Y. Hanazawa, Y. Uchino, and S. Sagara. ``Development of a rimless wheel robot with telescopic legs for step adaptability.'' Artificial Life and Robotics , Vol. 29, Iss. 2, pp. 349--357, 2024
work page 2024
-
[23]
F. Asano and Y. He, ``Water surface walking of planar 6-DOF legged robot based on control of center of mass,'' Int. J. of Dynamics and Control , Vol. 13, article number 153, 2025
work page 2025
-
[24]
S. Sanchez and P. A. Bhounsule. ``Design, modeling, and control of a differential drive rimless wheel that can move straight and turn.'' Automation , Vol. 2, Iss. 3, pp. 98--115, 2021
work page 2021
-
[25]
F. Asano and J. Kawamoto, ``Modeling and analysis of passive viscoelastic-legged rimless wheel that generates measurable period of double-limb support,'' Multibody System Dynamics , Vol. 31, Iss. 2, pp. 111--126, 2014
work page 2014
-
[26]
Hanazawa, Yuta, Haruka Nishinami, and Shinichi Sagara. ``Walking experiments of small and lightweight rimless wheel robot.'' Artificial Life and Robotics 27.4 (2022): 706-713
work page 2022
-
[27]
K. Shankar and J. W. Burdick. ``Motion planning and control for a tethered, rimless wheel differential drive vehicle.'' Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems , 2013
work page 2013
-
[28]
Gait Analysis and Control of Rimless Wheel Rovers for Planetary Exploration
SCHLEE, Dennis, et al. Gait Analysis and Control of Rimless Wheel Rovers for Planetary Exploration. In: 2024 International Conference on Space Robotics (iSpaRo). IEEE, 2024. p. 139-144
work page 2024
- [29]
- [30]
- [31]
-
[32]
O. Mori and T. Omata, ``Coupling of two 2-link robots with a passive joint for reconfigurable planar parallel robot,'' Proc. of the IEEE Int. Conf. on Robotics and Automation , pp. 4120--4125, 2002
work page 2002
-
[33]
W. H. Lee and A. C. Sanderson, ``Dynamic rolling locomotion and control of modular robots,'' IEEE Trans. on Robotics and Automation , pp. 32--41, Vol. 18, Iss. 1, 2002
work page 2002
-
[34]
T. Yamawaki, O. Mori and T. Omata, ``Nonholonomic dynamic rolling control of reconfigurable 5R closed kinematic chain robot with passive joints,'' Proc. of the IEEE Int. Conf. on Robotics and Automation , pp. 4054--4059, 2003
work page 2003
-
[35]
T. Matsuda and S. Murata, ``Stiffness distribution control - locomotion of closed link robot with mechanical softness,'' Proc. of the IEEE Int. Conf. on Robotics and Automation , pp. 1491--1498, 2006
work page 2006
-
[36]
W. Xiangzhi, T. Yaobin and W. Shanshan, ``Design and locomotion analysis of a novel modular rolling robot,'' Mechanism and Machine Theory , Vol. 133, pp. 23--43, 2019
work page 2019
-
[37]
Y. Hao, Y. Tian, J. Wu, Y. Li and Y. Yao, ``Design and locomotion analysis of two kinds of rolling expandable mobile linkages with a single degree of freedom,'' Frontiers of Mechanical Engineering , Vol. 15. pp. 365--373, 2020
work page 2020
-
[38]
Y. Li, Z. Wang, Y. Xu, J. S. Dai, Z. Zhao and Y. Yao, ``A deformable tetrahedron rolling mechanism (DTRM) based on URU branch,'' Mechanism and Machine Theory , Vol. 153, Article 104000, 2020
work page 2020
-
[39]
J. Paskarbeit, S. Beyer, M. Engel, A. Gucze, J. Schr\" o der and A. Schneider, ''Ourobot--A sensorized closed-kinematic-chain robot for shape-adaptive rolling in rough terrain,'' Robotics and Autonomous Systems , Vol. 140, 2021
work page 2021
-
[40]
E. R. Westervelt, J. W. Grizzle and D. E. Koditschek. ``Zero dynamics of planar biped walkers with one degree of under actuation,'' Vol. 35, Iss. 1, pp. 551--556, 2002. 0.8pt eqnarray* &=& [ array cccccc 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 \\ ^2 & 0 & 0 & 0 & 0 & 0 \\ ^2 & 0 & 0 & 0 & 0 & 0 \\ ^2 & 0 & 0 & 0 & 0 & 0 arr...
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.