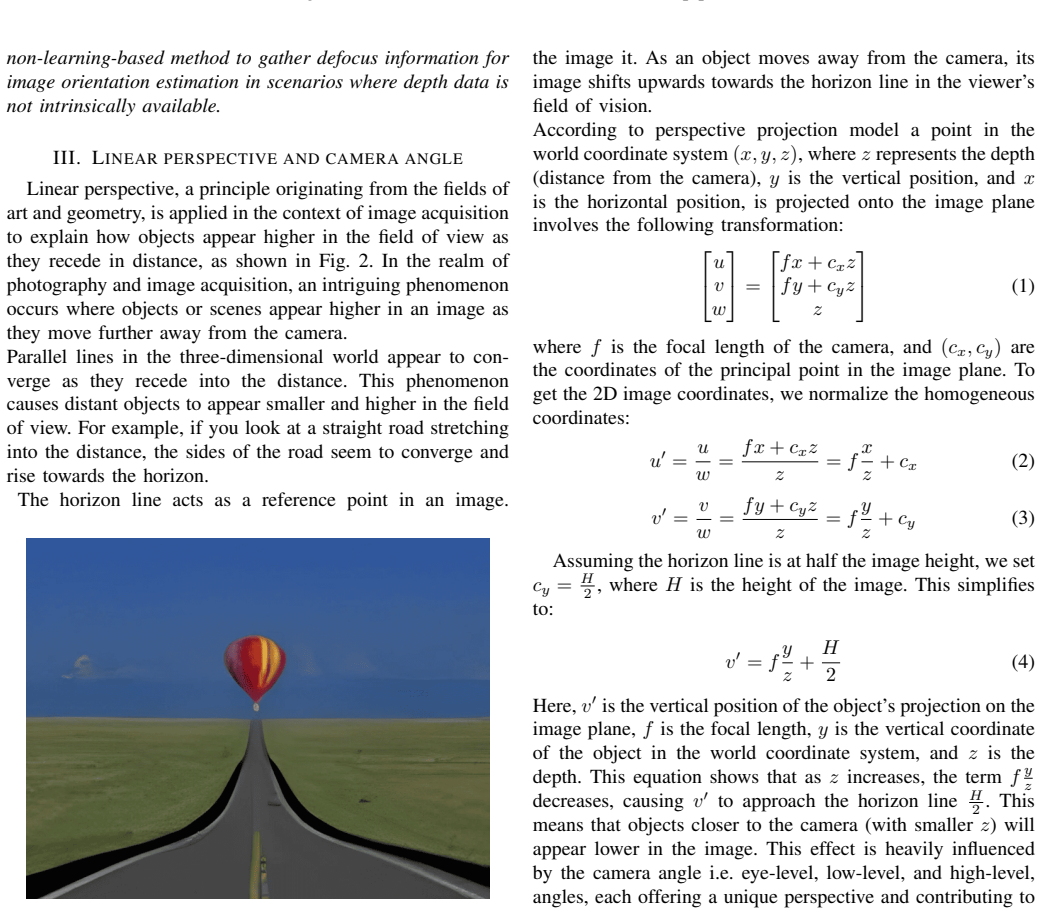
Depth-Aware Image and Video Orientation Estimation
Pith reviewed 2026-05-10 13:14 UTC · model grok-4.3
The pith
Depth distribution across the four quadrants of an image or video frame can be used to estimate its orientation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that orientation estimation can be achieved by leveraging the depth distribution across different quadrants of the image, with enhancements from depth gradient consistency and horizontal symmetry analysis, resulting in a framework that outperforms prior techniques in accuracy and robustness for applications in VR, AR, navigation, and surveillance.
What carries the argument
Depth distribution across the four quadrants of the image, supported by depth gradient consistency and horizontal symmetry analysis.
Load-bearing premise
Depth distribution patterns across quadrants in natural images are consistent and distinctive enough to accurately indicate the image's orientation.
What would settle it
A counterexample would be a collection of images with known upright orientations but uniform or misleading depth distributions across quadrants where the method incorrectly detects a rotation.
Figures



read the original abstract
This paper introduces a novel approach for image and video orientation estimation by leveraging depth distribution in natural images. The proposed method estimates the orientation based on the depth distribution across different quadrants of the image, providing a robust framework for orientation estimation suited for applications such as virtual reality (VR), augmented reality (AR), autonomous navigation, and interactive surveillance systems. To further enhance fine-scale perceptual alignment, we incorporate depth gradient consistency (DGC) and horizontal symmetry analysis (HSA), enabling precise orientation correction. This hybrid strategy effectively exploits depth cues to support spatial coherence and perceptual stability in immersive visual content. Qualitative and quantitative evaluations demonstrate the robustness and accuracy of the proposed approach, outperforming existing techniques across diverse scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a depth-aware approach to image and video orientation estimation that determines orientation from depth distributions across image quadrants. It augments this with depth gradient consistency (DGC) and horizontal symmetry analysis (HSA) to achieve fine-scale alignment and claims robustness for VR, AR, autonomous navigation, and surveillance applications, supported by qualitative and quantitative evaluations that outperform prior methods.
Significance. If the central claims were substantiated, the work could supply a lightweight, depth-cue-based alternative for orientation estimation in immersive and navigation pipelines. The quadrant-based depth idea is conceptually simple and potentially parameter-light, which would be a strength if accompanied by reproducible code or explicit derivations. However, the absence of any algorithmic specification, depth acquisition method, datasets, metrics, or error analysis means the significance cannot be assessed from the current text.
major comments (3)
- [Abstract] Abstract: the assertion that 'qualitative and quantitative evaluations demonstrate the robustness and accuracy... outperforming existing techniques' is load-bearing for the contribution yet supplies no datasets, metrics (e.g., angular error, success rate), baselines, or tables; without these the outperformance claim cannot be evaluated.
- [Abstract] Abstract / Method description: the method is said to 'estimate the orientation based on the depth distribution across different quadrants' and to incorporate DGC and HSA, but no equations, pseudocode, or formulation of these modules is given, nor is the source of depth (sensor, monocular estimator, etc.) stated; this directly affects whether the approach avoids circularity or error propagation when depth is noisy or absent.
- [Abstract] Abstract: the assumption that depth distributions in natural images are sufficiently consistent and gravity-aligned to determine orientation is asserted without counter-example analysis or ablation; scenes lacking ground planes, uniform-depth interiors, or overhead views (explicitly flagged in the stress-test) would falsify the premise, yet no such test or robustness bound is reported.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. We address each major comment below, clarifying aspects of the work and indicating revisions to strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'qualitative and quantitative evaluations demonstrate the robustness and accuracy... outperforming existing techniques' is load-bearing for the contribution yet supplies no datasets, metrics (e.g., angular error, success rate), baselines, or tables; without these the outperformance claim cannot be evaluated.
Authors: We agree that the abstract, due to its brevity, does not enumerate the specific datasets, metrics, or baselines used. The full manuscript contains a dedicated Experiments section reporting quantitative results with angular error and success rate metrics on multiple datasets, with direct comparisons to prior orientation estimation methods. To address the concern, we will revise the abstract to concisely reference the evaluation protocol and key performance outcomes. revision: yes
-
Referee: [Abstract] Abstract / Method description: the method is said to 'estimate the orientation based on the depth distribution across different quadrants' and to incorporate DGC and HSA, but no equations, pseudocode, or formulation of these modules is given, nor is the source of depth (sensor, monocular estimator, etc.) stated; this directly affects whether the approach avoids circularity or error propagation when depth is noisy or absent.
Authors: The Method section of the full manuscript provides the complete formulation, including equations defining the quadrant-based depth distribution, the depth gradient consistency (DGC) term, and the horizontal symmetry analysis (HSA) procedure. Depth is obtained via a pretrained monocular depth estimator applied to the input image, which is standard for image-based applications and avoids reliance on ground-truth depth at inference. We will update the abstract with a short clarifying clause on the depth source and overall pipeline to mitigate any ambiguity regarding potential error propagation. revision: yes
-
Referee: [Abstract] Abstract: the assumption that depth distributions in natural images are sufficiently consistent and gravity-aligned to determine orientation is asserted without counter-example analysis or ablation; scenes lacking ground planes, uniform-depth interiors, or overhead views (explicitly flagged in the stress-test) would falsify the premise, yet no such test or robustness bound is reported.
Authors: The manuscript includes targeted stress-tests and ablation studies on scenes without clear ground planes, uniform-depth environments, and overhead views, with results reported in the Experiments section. We acknowledge that the abstract does not explicitly discuss the core assumptions or reference these robustness checks. We will revise the abstract to briefly note the assumptions and point to the supporting analysis in the paper. revision: partial
Circularity Check
No circularity: method described without equations or self-referential reductions
full rationale
The provided abstract and context present the method as directly leveraging depth distribution across image quadrants for orientation estimation, with added DGC and HSA modules for refinement. No equations, derivation steps, fitted parameters, or self-citations appear in the text. The central claim is framed as an empirical exploitation of natural image depth cues rather than a mathematical reduction to its own inputs or prior author work. Without visible load-bearing steps that collapse by construction, the description remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Depth distribution across image quadrants reliably indicates orientation in natural images.
Reference graph
Works this paper leans on
-
[1]
Jackin head: Immersive visual telepresence system with omnidirectional wearable camera,
Takuji Narumi, Takashi Tanikawa, and Michitaka Hirose, “Jackin head: Immersive visual telepresence system with omnidirectional wearable camera,”IEEE Transactions on Visualization and Computer Graphics, vol. 22, no. 4, pp. 1234–1243, 2016
work page 2016
-
[2]
A survey on adaptive 360° video streaming: Solutions, challenges and opportunities,
Abid Yaqoob, Ting Bi, and Gabriel-Miro Muntean, “A survey on adaptive 360° video streaming: Solutions, challenges and opportunities,” IEEE Communications Surveys & Tutorials, vol. 22, no. 4, pp. 2801– 2838, 2020
work page 2020
-
[3]
Amir H. Meghdadi and Pourang Irani, “Interactive exploration of surveillance video through action shot summarization and trajectory visualization,”IEEE Transactions on Visualization and Computer Graphics, vol. 19, no. 12, pp. 2119–2128, 2013
work page 2013
-
[4]
Automatic photo orientation detection with convolutional neural networks,
Ujash Joshi and Michael Guerzhoy, “Automatic photo orientation detection with convolutional neural networks,” in2017 14th Conference on Computer and Robot Vision (CRV). IEEE, 2017, pp. 103–108
work page 2017
-
[5]
Deep image orientation angle detection,
Subhadip Maji and Smarajit Bose, “Deep image orientation angle detection,”arXiv preprint arXiv:2007.06709, 2020
-
[6]
Glare mitigation for enhanced autonomous vehicle perception,
Muhammad Z. Alam, Zeeshan Kaleem, and Sousso Kelouwani, “Glare mitigation for enhanced autonomous vehicle perception,”IEEE Trans- actions on Intelligent Vehicles, pp. 1–15, 2024
work page 2024
-
[7]
Enhanced com- puter vision with microsoft kinect sensor: A review,
Jungong Han, Ling Shao, Dong Xu, and Jamie Shotton, “Enhanced com- puter vision with microsoft kinect sensor: A review,”IEEE transactions on cybernetics, vol. 43, no. 5, pp. 1318–1334, 2013
work page 2013
-
[8]
Hybrid light field imaging for improved spatial resolution and depth range,
M Zeshan Alam and Bahadir K Gunturk, “Hybrid light field imaging for improved spatial resolution and depth range,”Machine Vision and Applications, vol. 29, no. 1, pp. 11–22, 2018
work page 2018
-
[9]
Deconvolution based light field extraction from a single image capture,
M Zeshan Alam and Bahadir K Gunturk, “Deconvolution based light field extraction from a single image capture,” in2018 25th IEEE International Conference on Image Processing (ICIP). IEEE, 2018, pp. 420–424
work page 2018
-
[10]
Stereo vision sensing: Review of existing systems,
Andrew O’Riordan, Thomas Newe, Gerard Dooly, and Daniel Toal, “Stereo vision sensing: Review of existing systems,” in2018 12th International Conference on Sensing Technology (ICST). IEEE, 2018, pp. 178–184
work page 2018
-
[11]
A comparative error analysis of current time-of-flight sensors,
Peter Fürsattel, Simon Placht, Michael Balda, Christian Schaller, Hannes Hofmann, Andreas Maier, and Christian Riess, “A comparative error analysis of current time-of-flight sensors,”IEEE Transactions on Computational Imaging, vol. 2, no. 1, pp. 27–41, 2016
work page 2016
-
[12]
Towards robust monocular depth estimation: Mixing datasets for zero-shot cross-dataset transfer,
René Ranftl, Katrin Lasinger, David Hafner, Konrad Schindler, and Vladlen Koltun, “Towards robust monocular depth estimation: Mixing datasets for zero-shot cross-dataset transfer,”IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2020
work page 2020
-
[13]
Analysis of deep learning based path loss prediction from satellite images,
Muhammad Z Alam, Hasan F Ates, Tuncer Baykas, and Bahadir K Gunturk, “Analysis of deep learning based path loss prediction from satellite images,” in2021 29th signal processing and communications applications conference (SIU). IEEE, 2021, pp. 1–4. 10 10°20°30°40°50°60°70°80°90°100°110°120°130°140°150°160°170°180°190°200°210°220°230°240°250°260°270°280°290...
work page 2021
-
[14]
Robust monocular depth estimation under chal- lenging conditions,
Stefano Gasperini, Nils Morbitzer, HyunJun Jung, Nassir Navab, and Federico Tombari, “Robust monocular depth estimation under chal- lenging conditions,” inProceedings of the IEEE/CVF international conference on computer vision, 2023, pp. 8177–8186
work page 2023
-
[15]
Automatic image orientation detection,
Aditya Vailaya, HongJiang Zhang, Changjiang Yang, Feng-I Liu, and Anil K Jain, “Automatic image orientation detection,”IEEE Transac- tions on Image Processing, vol. 11, no. 7, pp. 746–755, 2002
work page 2002
-
[16]
Detecting image orientation based on low-level visual content,
Yongmei Michelle Wang and Hongjiang Zhang, “Detecting image orientation based on low-level visual content,”Computer Vision and Image Understanding, vol. 93, no. 3, pp. 328–346, 2004
work page 2004
-
[17]
Image orientation detection using low-level features and faces,
Gianluigi Ciocca, Claudio Cusano, and Raimondo Schettini, “Image orientation detection using low-level features and faces,” inDigital Photography VI. SPIE, 2010, vol. 7537, pp. 254–261
work page 2010
-
[18]
Orientation-aware pedestrian attribute recognition based on graph convolution network,
Wei-Qing Lu, Hai-Miao Hu, Jinzuo Yu, Yibo Zhou, Hanzi Wang, and Bo Li, “Orientation-aware pedestrian attribute recognition based on graph convolution network,”IEEE Transactions on Multimedia, vol. 26, pp. 28–40, 2023
work page 2023
-
[19]
idisc: Internal discretization for monocular depth estimation,
Luigi Piccinelli, Christos Sakaridis, and Fisher Yu, “idisc: Internal discretization for monocular depth estimation,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 21477–21487
work page 2023
-
[20]
Trap attention: Monocular depth estimation with manual traps,
Chao Ning and Hongping Gan, “Trap attention: Monocular depth estimation with manual traps,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 5033–5043
work page 2023
-
[21]
Monocular depth estimation using information exchange network,
Wen Su, Haifeng Zhang, Quan Zhou, Wenzhen Yang, and Zengfu Wang, “Monocular depth estimation using information exchange network,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 6, 11 Tunnel Fig. 7: Visualization of the image rotations tested for fine-scale image orientation to produce results in Fig. 5 pp. 3491–3503, 2020
work page 2020
-
[22]
A depth estimation algorithm with a single image,
V . Aslantas, “A depth estimation algorithm with a single image,”Optics Express, vol. 15, pp. 5024–5029, 2007
work page 2007
-
[23]
Absolute depth estimation from a single defocused image,
J. Lin, X. Ji, W. Xu, and Q. Dai, “Absolute depth estimation from a single defocused image,”IEEE Trans. on Image Processing, vol. 22, pp. 4545 – 4550, 2013
work page 2013
-
[24]
Estimating spatially varying defocus blur from a single image,
X. Zhu, S. Cohen, S. Schiller, and P. Milanfar, “Estimating spatially varying defocus blur from a single image,”IEEE Trans. on Image Processing, vol. 22, pp. 4879–4891, 2013
work page 2013
-
[25]
Light field extraction from a conventional camera,
M Zeshan Alam and Bahadir K Gunturk, “Light field extraction from a conventional camera,”Signal Processing: Image Communication, vol. 109, pp. 116845, 2022
work page 2022
-
[26]
A. Veeraghavan, “Dappled photography : Mask enhanced cameras for heterodyned light fields and coded aperture refocusing,”ACM Trans. on Graphics, vol. 26, pp. 1–12, 2007
work page 2007
-
[27]
What are good apertures for defocus deblur- ring?,
C. Zhou and S. Nayar, “What are good apertures for defocus deblur- ring?,” inIEEE Int. Conf. on Computational Photography, 2009, pp. 1–8. 12 Fig. 8: Thumbnails of the selected subset of video sequences tested for the evaluation of the proposed orientation estimation technique
work page 2009
-
[28]
Perceptually optimized coded apertures for defocus deblurring,
M. Belen, P. Lara, C. Adrian, and G. Diego, “Perceptually optimized coded apertures for defocus deblurring,”Comput. Graph. Forum, vol. 31, pp. 1867–1879, 2012
work page 2012
-
[29]
Image and depth from a conventional camera with a coded aperture,
Anat Levin, Rob Fergus, Frédo Durand, and William T Freeman, “Image and depth from a conventional camera with a coded aperture,”ACM transactions on graphics (TOG), vol. 26, no. 3, pp. 70–es, 2007
work page 2007
-
[30]
Optimized aperture shapes for depth estimation,
A. Sellent and P. Favaro, “Optimized aperture shapes for depth estimation,”Pattern Recognition Letters, vol. 40, pp. 96–103, 2014
work page 2014
-
[31]
Image and depth from a single defocused image using coded aperture photography,
M. Masoudifar and H. R. Pourreza, “Image and depth from a single defocused image using coded aperture photography,”CoRR, 2016
work page 2016
-
[32]
Msf-ghostnet: Computationally-efficient yolo for detecting drones in low-light condi- tions,
Maham Misbah, Misha Urooj Khan, Zeeshan Kaleem, Ali Muqaibel, Muhammad Z Alam, Ran Liu, and Chau Yuen, “Msf-ghostnet: Computationally-efficient yolo for detecting drones in low-light condi- tions,”IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2024
work page 2024
-
[33]
Blind deblurring for saturated images,
Liang Chen, Jiawei Zhang, Songnan Lin, Faming Fang, and Jimmy S Ren, “Blind deblurring for saturated images,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 6308–6316
work page 2021
-
[34]
Saturation- aware space-variant blind image deblurring,
Muhammad Z. Alam, Larry Stetsiuk, and Arooba Zeshan, “Saturation- aware space-variant blind image deblurring,”IEEE Transactions on Multimedia, pp. 1–11, 2026
work page 2026
-
[35]
Space- variant blur kernel estimation and image deblurring through kernel clustering,
M. Zeshan Alam, Qinchun Qian, and Bahadir K. Gunturk, “Space- variant blur kernel estimation and image deblurring through kernel clustering,”Signal Processing: Image Communication, vol. 76, pp. 41– 55, 2019
work page 2019
-
[36]
Param Hanji, Muhammad Z Alam, Nicola Giuliani, Hu Chen, and Rafał K Mantiuk, “Hdr4cv: High dynamic range dataset with adversarial illumination for testing computer vision methods,” inLondon Imaging Meeting. Society for Imaging Science and Technology, 2021, vol. 2021, pp. 40404–1
work page 2021
-
[37]
Sun database: Large-scale scene recognition from abbey to zoo,
Jianxiong Xiao, James Hays, Krista A Ehinger, Aude Oliva, and Antonio Torralba, “Sun database: Large-scale scene recognition from abbey to zoo,” in2010 IEEE computer society conference on computer vision and pattern recognition. IEEE, 2010, pp. 3485–3492
work page 2010
-
[38]
Image orientation detection using lbp-based features and logistic regression,
Gianluigi Ciocca, Claudio Cusano, and Raimondo Schettini, “Image orientation detection using lbp-based features and logistic regression,” Multimedia Tools and Applications, vol. 74, pp. 3013–3034, 2015
work page 2015
-
[39]
Content-based image orientation recognition,
Ekaterina Tolstaya, “Content-based image orientation recognition,” in Proceedings of the international conference on computer graphics and vision, GraphiCon, 2007, pp. 158–161
work page 2007
-
[40]
Low complexity orientation detection algorithm for real-time implementation,
Vikram V Appia and Rajesh Narasimha, “Low complexity orientation detection algorithm for real-time implementation,” inReal-Time Image and Video Processing 2011. SPIE, 2011, vol. 7871, pp. 77–82. 13 Muhamad Zeshan Alamreceived his B.S. degree in Computer Engineering from COMSATS University, Pakistan, M.S. degree in Electrical and Electronics Engineering fr...
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.