UniGeo: Unifying Geometric Guidance for Camera-Controllable Image Editing via Video Models
Pith reviewed 2026-05-12 02:48 UTC · model grok-4.3
The pith
Unifying geometric guidance at representation, architecture, and loss levels lets video models edit images under new camera poses with less drift.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that fragmented geometric guidance is the root cause of instability in video-model-based camera-controllable editing and that injecting unified guidance at representation, architecture, and loss levels jointly resolves it. At the representation level a frame-decoupled geometric reference injection supplies cross-view context. At the architecture level geometric anchor attention aligns multi-view features. At the loss level a trajectory-endpoint supervision strategy explicitly reinforces structural fidelity of target views. Experiments across public benchmarks with both extensive and limited camera motion show the resulting outputs exceed prior methods in visual quality and,
What carries the argument
The three-level unified geometric guidance system that combines frame-decoupled reference injection for context, geometric anchor attention for feature alignment, and trajectory-endpoint supervision for fidelity.
If this is right
- The unified approach outperforms existing methods on public benchmarks for both large and small camera motions.
- Geometric drift and structural degradation are reduced under continuous camera movement.
- Cross-view consistency is maintained more reliably because guidance acts at every level that shapes the output.
Where Pith is reading between the lines
- The same multi-level unification pattern could be tested on other tasks that require multi-view consistency, such as video prediction or light-field rendering.
- Extending the supervision to longer sequences would check whether the stability scales to extended camera paths not covered in current benchmarks.
- Pairing the framework with real-time pose estimation could enable interactive editing sessions where users freely move the virtual camera.
Load-bearing premise
That fragmented guidance is the main driver of drift and that adding unified injections at precisely these three levels will stabilize output without creating fresh inconsistencies or demanding heavy retuning.
What would settle it
A controlled test on long or rapid camera trajectories where the three-level guidance still produces measurable geometric drift or structural degradation comparable to earlier methods.
Figures






read the original abstract
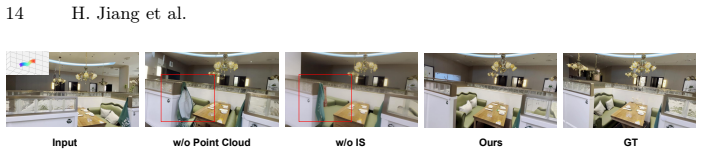
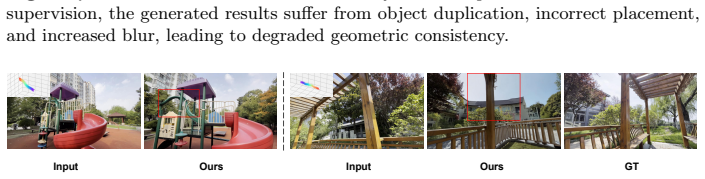
Camera-controllable image editing aims to synthesize novel views of a given scene under varying camera poses while strictly preserving cross-view geometric consistency. However, existing methods typically rely on fragmented geometric guidance, such as only injecting point clouds at the representation level despite models containing multiple levels, and are mainly based on image diffusion models that operate on discrete view mappings. These two limitations jointly lead to geometric drift and structural degradation under continuous camera motion. We observe that while leveraging video models provides continuous viewpoint priors for camera-controllable image editing, they still struggle to form stable geometric understanding if geometric guidance remains fragmented. To systematically address this, we inject unified geometric guidance across three levels that jointly determine the generative output: representation, architecture, and loss function. To this end, we propose UniGeo, a novel camera-controllable editing framework. Specifically, at the representation level, UniGeo incorporates a frame-decoupled geometric reference injection mechanism to provide robust cross-view geometry context. At the architecture level, it introduces geometric anchor attention to align multi-view features. At the loss function level, it proposes a trajectory-endpoint geometric supervision strategy to explicitly reinforce the structural fidelity of target views. Comprehensive experiments across multiple public benchmarks, encompassing both extensive and limited camera motion settings, demonstrate that UniGeo significantly outperforms existing methods in both visual quality and geometric consistency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes UniGeo, a camera-controllable image editing framework that leverages video models to address geometric drift under continuous camera motion. It unifies geometric guidance at three levels: representation (via a frame-decoupled geometric reference injection mechanism), architecture (via geometric anchor attention), and loss function (via a trajectory-endpoint geometric supervision strategy). The paper claims this yields superior visual quality and geometric consistency compared to prior methods based on fragmented guidance and image diffusion models, supported by comprehensive experiments on public benchmarks covering extensive and limited camera motion settings.
Significance. If the empirical results hold, the work could advance camera-controllable editing by demonstrating how video priors can be stabilized through explicit multi-level geometric unification rather than relying on fragmented cues. The three concrete mechanisms (frame-decoupled reference injection, geometric anchor attention, and trajectory-endpoint supervision) represent specific, potentially reusable contributions that credit the authors for targeting the multi-level structure of generative models.
major comments (2)
- [Abstract] Abstract: The claim that 'UniGeo significantly outperforms existing methods in both visual quality and geometric consistency' is presented without any quantitative metrics, baseline details, error bars, or ablation results, leaving the central performance claim without visible supporting evidence.
- [Experiments] Experiments section: No ablation isolates the contribution of a video-model baseline using only representation-level injection against the full three-level UniGeo on the reported geometric consistency metrics. This is load-bearing for the claim that fragmented guidance remains the dominant failure mode and that joint injection at all three levels is required to avoid drift or new inconsistencies.
minor comments (1)
- [Abstract] Abstract: The distinction between 'extensive and limited camera motion settings' is referenced but not defined with specific thresholds or examples, which could aid reader understanding.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and detailed review. We address the major comments point by point below, providing clarifications and committing to revisions that strengthen the manuscript without altering its core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that 'UniGeo significantly outperforms existing methods in both visual quality and geometric consistency' is presented without any quantitative metrics, baseline details, error bars, or ablation results, leaving the central performance claim without visible supporting evidence.
Authors: We agree that the abstract would benefit from brief supporting evidence to contextualize the performance claim. In the revised manuscript, we have updated the abstract to include key quantitative metrics (e.g., specific improvements in PSNR, SSIM, and geometric consistency scores) and a concise reference to the main baselines and experimental settings. Detailed tables with error bars, full ablations, and per-scenario breakdowns remain in the Experiments section, as they exceed the length constraints of an abstract while preserving its summary nature. revision: yes
-
Referee: [Experiments] Experiments section: No ablation isolates the contribution of a video-model baseline using only representation-level injection against the full three-level UniGeo on the reported geometric consistency metrics. This is load-bearing for the claim that fragmented guidance remains the dominant failure mode and that joint injection at all three levels is required to avoid drift or new inconsistencies.
Authors: This is a fair and substantive point. Our experiments compare UniGeo against prior fragmented-guidance methods (both image- and video-based) and include component-wise ablations, but we did not explicitly report a video-model baseline limited to representation-level injection evaluated on the geometric consistency metrics. To directly address the concern and reinforce the necessity of multi-level unification, we will add this ablation in the revised Experiments section, including quantitative results on the relevant metrics to show that representation-level injection alone is insufficient to prevent drift under continuous camera motion. revision: yes
Circularity Check
No circularity: new mechanisms validated on external benchmarks
full rationale
The paper proposes three distinct new components (frame-decoupled geometric reference injection, geometric anchor attention, and trajectory-endpoint supervision) to unify guidance across representation, architecture, and loss levels in a video model. These are introduced as original contributions rather than derived from or equivalent to prior inputs. Performance is assessed via comparisons on public benchmarks under varied camera motion settings, with no equations, fitted parameters renamed as predictions, or self-citation chains that reduce the central claims to the paper's own definitions or data subsets. The derivation chain remains self-contained and externally falsifiable.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Video models provide continuous viewpoint priors that can be leveraged for camera-controllable editing.
invented entities (3)
-
frame-decoupled geometric reference injection mechanism
no independent evidence
-
geometric anchor attention
no independent evidence
-
trajectory-endpoint geometric supervision strategy
no independent evidence
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.