Adaptive vs. Static Robot-to-Human Handover: A Study on Orientation and Approach Direction
Pith reviewed 2026-05-08 11:34 UTC · model grok-4.3
The pith
Adaptive robot handovers that adjust object orientation in real time reduce user cognitive workload and stress.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By integrating AI-based hand pose estimation with smooth, kinematically constrained trajectories, the system dynamically adjusts the object's delivery pose in real time based on the user's hand pose and the intended downstream task. A user study comparing this adaptive approach to a static baseline across multiple tasks found that dynamic alignment significantly reduces users' cognitive workload and physiological stress, while increasing perceived trust in the robot's reliability.
What carries the argument
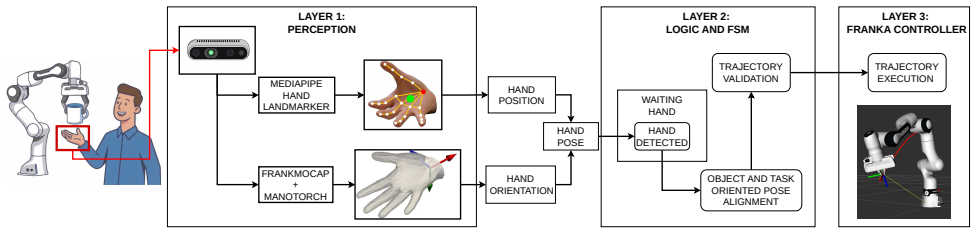
Adaptive framework using real-time AI hand pose estimation to dynamically adjust handover orientation and trajectory while enforcing kinematic safety constraints.
If this is right
- Dynamic pose adjustment leads to lower cognitive workload for users during handovers.
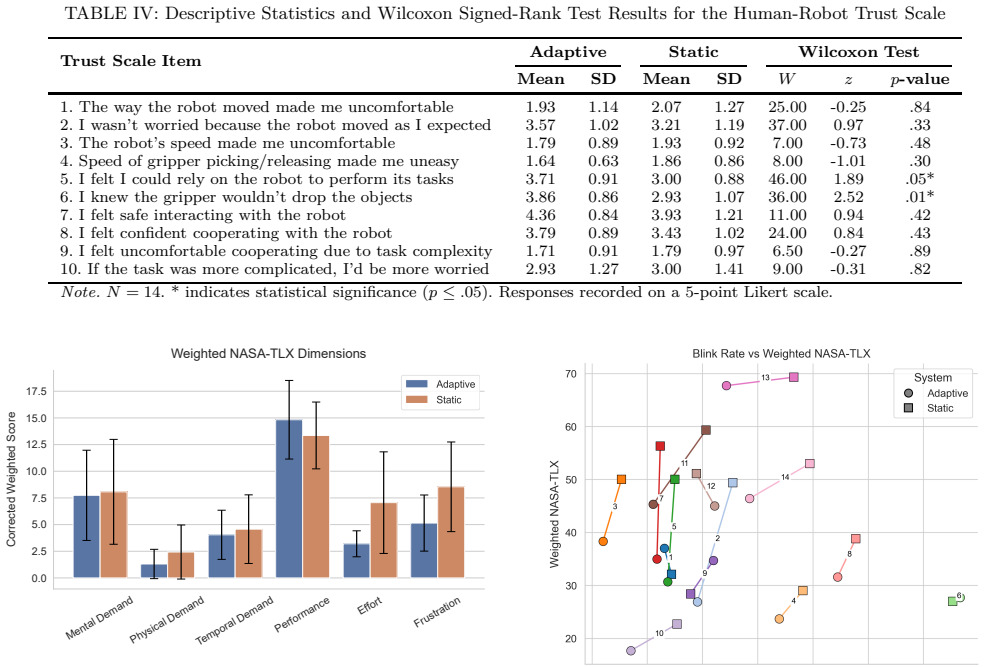
- Physiological stress, measured by blink rate, decreases with the adaptive system.
- Users report higher trust in the robot when it adapts to their hand pose and task.
- Task-aware adaptive systems support more ergonomic and fluid human-robot interactions.
Where Pith is reading between the lines
- Extending this to predict not just grasp but full task sequences could further optimize robot behavior.
- Integrating additional sensors might improve robustness in unstructured environments.
- Similar adaptive principles could apply to other physical human-robot interactions like collaborative assembly.
Load-bearing premise
Real-time AI hand pose estimation can reliably determine the user's intended grasp and downstream task without significant errors or delays.
What would settle it
Observing no difference in workload or stress when the hand pose estimation is inaccurate or delayed, or when the adaptive system fails to match user expectations.
Figures

read the original abstract
Robot-to-human handovers often rely on static, open-loop strategies (or, at best, approaches that adapt only the position), which generally do not consider how the object will be grasped by the human, thus requiring the user to adapt. This work presents a novel adaptive framework that dynamically adjusts the object's delivery pose in real time based on the user's hand pose and the intended downstream task. By integrating AI-based hand pose estimation with smooth, kinematically constrained trajectories, the system ensures a safe approach and an optimal handover orientation. A comprehensive user study compares the proposed adaptive approach against a static baseline across multiple tasks, evaluating both subjective metrics (NASA-TLX, Human-Robot Trust Scale) and objective physiological data (blink rate measured via wearable eye-trackers). The results demonstrate that dynamic alignment significantly reduces users' cognitive workload and physiological stress, while improving their confidence in the robot's reliability. These findings highlight the potential of task- and pose-aware systems for enabling fluid and ergonomic human-robot collaboration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a novel adaptive robot-to-human handover framework that integrates real-time AI hand-pose estimation with kinematically constrained trajectories to dynamically adjust object orientation and approach direction based on the user's hand pose and downstream task. It evaluates this system against a static baseline in a user study, reporting that the adaptive approach significantly reduces cognitive workload (NASA-TLX), physiological stress (blink rate via eye-trackers), and increases perceived trust.
Significance. If the results hold after addressing validation gaps, the work could meaningfully advance ergonomic human-robot collaboration by showing that task- and pose-aware adaptation improves user experience over static strategies. The combination of subjective scales and objective physiological measures is a positive aspect of the evaluation design.
major comments (2)
- [Methods / System Description] System integration and methods sections: The description of the AI-based hand pose estimation module and its integration with trajectories is provided, but the manuscript reports neither per-trial success rates, accuracy metrics (e.g., pose estimation error under study lighting/occlusion), latency distributions, nor failure-mode analysis for the perception component during the live handover trials. This is load-bearing for the central claim, as metric differences cannot be confidently attributed to successful dynamic alignment without evidence that the module reliably inferred grasp intent and task in real time.
- [Results / User Study] Results and evaluation sections: The abstract and results claim statistically significant benefits on NASA-TLX, blink rate, and trust scales, but no details are given on participant count, statistical tests (e.g., ANOVA or t-tests with corrections), effect sizes, or confidence intervals. Without these, the robustness of the reported differences and their attribution to adaptation versus confounds (novelty, order effects) cannot be assessed.
minor comments (2)
- [Abstract / Methods] The abstract refers to 'multiple tasks' without enumerating them; the methods should explicitly list the tasks and how downstream intent was determined or instructed.
- [Figures / System Description] Figure captions and trajectory descriptions would benefit from clearer notation distinguishing static vs. adaptive conditions and any kinematic constraints applied.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We agree that additional quantitative details on the perception module and statistical reporting are important for strengthening the claims and will incorporate them in the revision.
read point-by-point responses
-
Referee: [Methods / System Description] System integration and methods sections: The description of the AI-based hand pose estimation module and its integration with trajectories is provided, but the manuscript reports neither per-trial success rates, accuracy metrics (e.g., pose estimation error under study lighting/occlusion), latency distributions, nor failure-mode analysis for the perception component during the live handover trials. This is load-bearing for the central claim, as metric differences cannot be confidently attributed to successful dynamic alignment without evidence that the module reliably inferred grasp intent and task in real time.
Authors: We agree that detailed performance metrics for the hand pose estimation module are essential to substantiate the central claims. Although the manuscript describes the module and its integration, these specific quantitative metrics were not reported. In the revised version, we will add per-trial success rates, accuracy metrics (including pose estimation error under the study lighting and occlusion conditions), latency distributions, and a failure-mode analysis drawn from the trial data. This will allow readers to evaluate the reliability of the real-time dynamic alignment. revision: yes
-
Referee: [Results / User Study] Results and evaluation sections: The abstract and results claim statistically significant benefits on NASA-TLX, blink rate, and trust scales, but no details are given on participant count, statistical tests (e.g., ANOVA or t-tests with corrections), effect sizes, or confidence intervals. Without these, the robustness of the reported differences and their attribution to adaptation versus confounds (novelty, order effects) cannot be assessed.
Authors: We acknowledge that the current results section lacks explicit reporting of these statistical details. In the revised manuscript, we will include the participant count, specify the statistical tests used (including any corrections for multiple comparisons), report effect sizes, and provide confidence intervals for the NASA-TLX, blink rate, and trust metrics. We will also expand the description of the study design to clarify how potential confounds such as order effects were mitigated through counterbalancing. revision: yes
Circularity Check
No circularity: empirical user study with independent metrics
full rationale
The manuscript presents an implemented adaptive handover system (AI hand-pose estimation integrated with kinematically constrained trajectories) and evaluates it through a controlled user study against a static baseline. Reported outcomes rest on direct measurements—NASA-TLX scores, Human-Robot Trust Scale responses, and blink-rate data from eye-trackers—rather than any fitted model, equation, or prediction that reduces to the framework's own definitions. No self-citation chain, uniqueness theorem, or ansatz is invoked to justify the central claims; the results are generated by participant data collection and statistical comparison. This is a standard empirical robotics evaluation whose derivation chain is self-contained against external benchmarks.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.