Connected Dependability Cage: Run-Time Function and Anomaly Monitoring for the Development and Operation of Safe Automated Vehicles
Pith reviewed 2026-05-07 07:08 UTC · model grok-4.3
The pith
The Connected Dependability Cage framework enables hierarchical fail-operational behavior in AI perception systems for automated vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
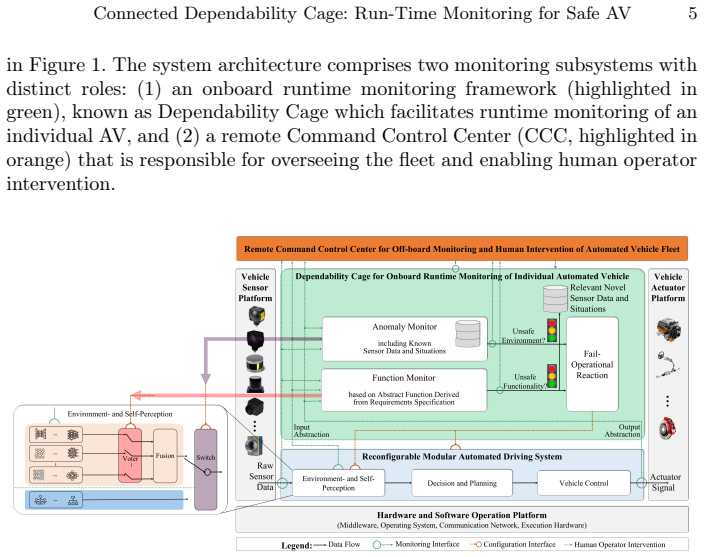
The Connected Dependability Cage is an architectural framework designed to enable hierarchical fail-operational behavior in AI-enabled perception systems. This framework integrates two complementary monitoring mechanisms: a Function Monitor that oversees multiple heterogeneous AI-based perception pipelines and detects inconsistencies through a voting mechanism, and an Anomaly Monitor that evaluates the reliability of AI perception by detecting unknown or novel objects in scenes that may be excluded from the training dataset. In the presence of critical discrepancies, the system supports graceful degradation, ultimately enabling a transition to a minimal-risk maneuver strategy. Furthermore, a
What carries the argument
The Connected Dependability Cage, an architectural framework that combines a voting-based Function Monitor for detecting inconsistencies in AI perception pipelines and an Anomaly Monitor for identifying novel objects to achieve fail-operational capabilities.
If this is right
- The system enables continued safe operation or graceful degradation to minimal-risk maneuvers during AI perception failures or unknown conditions.
- Both monitors trigger automated data recording to support iterative development and improvement of the perception systems.
- The framework helps achieve compliance with functional safety standards such as ISO 26262 and SOTIF by addressing malfunctions and unknown scenarios.
- Extensive vehicle testing demonstrates the practical effectiveness of the monitors in real-world applications.
- Hierarchical fail-operational behavior reduces risks in dynamic and unpredictable environments.
Where Pith is reading between the lines
- This dual-monitor strategy could be extended to other safety-critical AI applications, such as autonomous robotics in industrial settings, where similar needs for inconsistency detection and novelty handling exist.
- The data recording mechanism opens the door to using field data for retraining AI models to handle previously unseen objects more effectively over time.
- Balancing the thresholds in the voting and anomaly detection would be key to avoiding unnecessary activations that could reduce overall system availability.
Load-bearing premise
The assumption that the voting mechanism can reliably detect meaningful inconsistencies across heterogeneous AI perception pipelines and that the Anomaly Monitor can accurately identify unknown or novel objects in diverse real-world scenes without too many false positives.
What would settle it
A real-world test scenario in which an AI perception system makes a critical error, such as failing to detect an obstacle, but neither the Function Monitor nor the Anomaly Monitor raises a safety flag to initiate degradation or recording.
Figures


read the original abstract
The advancement of automated vehicles introduces complex safety challenges, particularly in dynamic and unpredictable environments where AI-enabled perception systems must operate reliably. Ensuring compliance with safety standards such as ISO 26262 and ISO/PAS 21448 (SOTIF) is essential for addressing system malfunctions and mitigating unsafe behavior in unknown scenarios. However, as automation levels increase, vehicles must go beyond conventional functional safety by incorporating fail-operational capabilities that enable continued safe operation during system or component failures and the handling of unfamiliar or degraded operational conditions. To address these safety concerns, we propose the Connected Dependability Cage, an architectural framework designed to enable hierarchical fail-operational behavior in AI-enabled perception systems. This framework integrates two complementary monitoring mechanisms: a Function Monitor that oversees multiple heterogeneous AI-based perception pipelines and detects inconsistencies through a voting mechanism, and an Anomaly Monitor that evaluates the reliability of AI perception by detecting unknown or novel objects in scenes that may be excluded from the training dataset. In the presence of critical discrepancies, the system supports graceful degradation, ultimately enabling a transition to a minimal-risk maneuver strategy. Furthermore, whenever either monitor raises a safety flag, an automated data recording process is initiated to facilitate iterative system development and continuous improvement. Both monitors have been implemented and validated through extensive vehicle testing, demonstrating their practical effectiveness in real-world applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Connected Dependability Cage, an architectural framework for enabling hierarchical fail-operational behavior in AI-enabled perception systems for automated vehicles. It integrates a Function Monitor that oversees multiple heterogeneous AI-based perception pipelines and detects inconsistencies via a voting mechanism, together with an Anomaly Monitor that identifies unknown or novel objects absent from the training data. Upon critical discrepancies the system performs graceful degradation to a minimal-risk maneuver; safety flags also trigger automated data recording for iterative improvement. The authors state that both monitors have been implemented and validated through extensive vehicle testing demonstrating practical effectiveness, while targeting compliance with ISO 26262 and ISO/PAS 21448 (SOTIF).
Significance. If the monitoring mechanisms prove reliable, the framework would offer a concrete runtime architecture for addressing both functional-safety malfunctions and SOTIF-related unknown scenarios in automated vehicles, supporting continued operation rather than immediate shutdown. The combination of inconsistency voting, novelty detection, graceful degradation, and closed-loop data recording aligns with emerging needs for fail-operational AI systems. However, the significance cannot be fully assessed because the manuscript supplies no quantitative evidence (detection rates, false-positive rates, latency, test coverage) that the monitors actually satisfy the claimed reliability under correlated-failure conditions.
major comments (3)
- [Abstract] Abstract: the assertion that 'both monitors have been implemented and validated through extensive vehicle testing, demonstrating their practical effectiveness in real-world applications' is load-bearing for the central claim yet unsupported by any metrics, test scenarios, number of drives, distribution of novel objects, or performance numbers (detection rate, false-positive rate, latency, comparison to baselines). Without these data it is impossible to determine whether the monitors meet SOTIF and fail-operational requirements when all perception pipelines could fail in correlated ways.
- [Abstract] Abstract / Framework description: the Function Monitor is described only as detecting inconsistencies 'through a voting mechanism,' with no specification of the voting rule (majority, weighted, threshold), how disagreement is quantified across heterogeneous pipelines, or how the system behaves when monitors themselves disagree or fail. This detail is essential for evaluating the reliability of the hierarchical fail-operational claim.
- [Abstract] Abstract: the Anomaly Monitor is said to detect 'unknown or novel objects' but no technique (uncertainty estimation, reconstruction error, out-of-distribution scoring, etc.), operating threshold, or early-warning latency is given. Consequently the claim that it enables timely graceful degradation to a minimal-risk maneuver cannot be evaluated.
minor comments (2)
- [Abstract] The abstract introduces the term 'Connected Dependability Cage' without clarifying what 'Connected' refers to (e.g., V2X links, cloud integration, or simply the interconnection of the two monitors). A short definition or reference to prior 'dependability cage' literature would improve clarity.
- Ensure that all acronyms (SOTIF, ISO 26262, etc.) are expanded on first use in the main text and that the full manuscript contains a dedicated related-work section comparing the proposed monitors to existing runtime assurance and anomaly-detection methods for autonomous vehicles.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important areas where the manuscript can be strengthened to better support the claims regarding the Connected Dependability Cage framework. We provide point-by-point responses below and will incorporate revisions to address the concerns.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'both monitors have been implemented and validated through extensive vehicle testing, demonstrating their practical effectiveness in real-world applications' is load-bearing for the central claim yet unsupported by any metrics, test scenarios, number of drives, distribution of novel objects, or performance numbers (detection rate, false-positive rate, latency, comparison to baselines). Without these data it is impossible to determine whether the monitors meet SOTIF and fail-operational requirements when all perception pipelines could fail in correlated ways.
Authors: We agree that the abstract and manuscript would benefit from explicit quantitative metrics to substantiate the validation claims and enable assessment of reliability under correlated failures. The current manuscript describes the implementation and real-world testing but does not report specific performance numbers. In the revised version, we will add a dedicated 'Experimental Results' section (and update the abstract) with key metrics from our vehicle tests, including inconsistency and anomaly detection rates, false-positive rates, average processing latency, number of test drives and total distance covered, distribution of novel objects encountered, and comparisons against baseline approaches. This will directly support evaluation against SOTIF and fail-operational requirements. revision: yes
-
Referee: [Abstract] Abstract / Framework description: the Function Monitor is described only as detecting inconsistencies 'through a voting mechanism,' with no specification of the voting rule (majority, weighted, threshold), how disagreement is quantified across heterogeneous pipelines, or how the system behaves when monitors themselves disagree or fail. This detail is essential for evaluating the reliability of the hierarchical fail-operational claim.
Authors: The full manuscript (Section 3) specifies the Function Monitor's voting rule as a threshold-based majority vote, where disagreement is quantified via output variance across the heterogeneous perception pipelines (with a configurable threshold to trigger a safety flag). When the Function Monitor itself indicates disagreement or failure, the framework escalates to the Anomaly Monitor and initiates graceful degradation to a minimal-risk maneuver. We will revise the abstract to concisely include this ('via a threshold-based majority voting mechanism that quantifies disagreement across pipelines') and add explicit cross-references to Section 3 for the full specification, including monitor failure handling. revision: partial
-
Referee: [Abstract] Abstract: the Anomaly Monitor is said to detect 'unknown or novel objects' but no technique (uncertainty estimation, reconstruction error, out-of-distribution scoring, etc.), operating threshold, or early-warning latency is given. Consequently the claim that it enables timely graceful degradation to a minimal-risk maneuver cannot be evaluated.
Authors: We acknowledge that the abstract lacks these operational details. The manuscript (Section 4) describes the Anomaly Monitor as using out-of-distribution detection via reconstruction error from a trained autoencoder, with the operating threshold set at the 95th percentile of validation reconstruction errors and early-warning latency typically below 100 ms to enable timely degradation. We will update the abstract to reference this technique ('using out-of-distribution scoring based on reconstruction error') and include the latency figure, along with a cross-reference to the detailed description and associated figure in Section 4. revision: yes
Circularity Check
No significant circularity; architectural proposal with no derivation chain
full rationale
The paper is an architectural proposal for the Connected Dependability Cage framework that integrates a Function Monitor (using voting on heterogeneous perception pipelines) and an Anomaly Monitor (for novel objects), with graceful degradation to minimal-risk maneuvers and data recording. No equations, predictions, fitted parameters, or mathematical derivations appear in the abstract or described content. The central claim is the framework design itself, positioned against external standards (ISO 26262, ISO/PAS 21448) rather than derived from prior self-referential results. The assertion of 'extensive vehicle testing' is a validation claim lacking quantitative detail, but this is an evidence gap, not a reduction of any output to its own inputs by construction. No self-definitional steps, fitted-input predictions, load-bearing self-citations, uniqueness theorems, or ansatz smuggling are present. The derivation chain is empty; the work is self-contained as a design proposal.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption AI-enabled perception systems can produce inconsistencies that are detectable by a voting mechanism across heterogeneous pipelines.
- domain assumption Unknown or novel objects in real-world scenes can be reliably identified as anomalies by the Anomaly Monitor even if excluded from training data.
Reference graph
Works this paper leans on
-
[1]
https://github.com/open-mmlab/mmdetection3d, (Accessed on 12/29/2024)
Openmmlab next-generation platform for general 3d object detection*. https://github.com/open-mmlab/mmdetection3d, (Accessed on 12/29/2024)
work page 2024
-
[2]
Aniculaesei, A., Aslam, I., Bamal, D., Helsch, F., Vorwald, A., Zhang, M., Rausch, A.: Connected dependability cage approach for safe automated driv- ing. In: 23. Internationales Stuttgarter Symposium, Stuttgart, Germany (2023). https://doi.org/10.1007/978-3-658-42048-2_1
-
[3]
SAE International Journal of Connected and Automated Vehicles8(12-08-02-0021) (2025)
Aniculaesei,A.,Aslam,I.,Zhang,M.,Buragohain,A.,Vorwald,A.,Rausch,A.:Im- proving safety of autonomous vehicles: A verifiable method for graceful degradation of decision and control responsibilities. SAE International Journal of Connected and Automated Vehicles8(12-08-02-0021) (2025)
work page 2025
-
[4]
Aniculaesei, A., Grieser, J., Rausch, A., Rehfeldt, K., Warnecke, T.: To- wards a holistic software systems engineering approach for dependable au- tonomous systems. In: Proceedings of the 1st International Workshop on Software Engineering for AI in Autonomous Systems. pp. 23–30 (2018). https://doi.org/10.1145/3194085.3194091
-
[5]
Aniculaesei, A., Grieser, J., Rausch, A., Rehfehldt, K., Warnecke, T.: Graceful degradation of decision and control responsibility for autonomous systems based on dependability cages. In: 5th International Symposium on Future Active Safety Technology toward Zero Accidents, Blacksburg, USA (2019)
work page 2019
-
[6]
Aslam, I., Aniculaesei, A., Buragohain, A., Zhang, M., Bamal, D., Rausch, A.: Runtime safety assurance of autonomous last-mile delivery vehi- cles in urban-like environment. Tech. rep., SAE Technical Paper (2024). https://doi.org/doi.org/10.4271/2024-01-2991
-
[7]
Aslam, I., Buragohain, A., Bamal, D., Aniculaesei, A., Zhang, M., Rausch, A.: A method for the runtime monitoring of ai-based environment perception in auto- mated driving systems. In: Proceedings of the The Sixteenth International Con- ference on Adaptive and Self-Adaptive Systems and Applications in Venice, Italy. pp. 17–25 (April 2024)
work page 2024
-
[8]
Avl dynamic ground truth system. https://www.avl.com/en-de/testing- solutions/automated-and-connected-mobility-testing/avl-dynamic-ground-truth- system, (Accessed on 12/30/2024)
work page 2024
-
[9]
YouTube (2024), [Online] Available: https://www.youtube.com/watch?v=OsYWLlpNgPo, Accessed: Nov
AVL Software & Functions: Avl’s data collection device. YouTube (2024), [Online] Available: https://www.youtube.com/watch?v=OsYWLlpNgPo, Accessed: Nov. 14, 2024
work page 2024
-
[10]
Information and Software Technology 73 (2016)
Behrere, S., Törngren, M.: A functional reference architecture for au- tonomous driving. Information and Software Technology 73 (2016). https://doi.org/10.1016/j.infsof.2015.12.008
-
[11]
Bundesministerium für Wirtschaft und Klimaschutz (BMWK): Safewahr. Tagung Autonomes Fahren p. 51 (2021), [Online] Available: https://www.tagung- autonomes-fahren.de/downloads/Projektsteckbriefe-Sammlung-BMWK.pdf, Ac- cessed: Nov. 14, 2024
work page 2021
-
[12]
Castelino, R.M., Rothemann, K., Lamm, A., Hahn, A.: Connected ve- hicle perception monitoring: A runtime verification approach for en- hanced autonomous driving safety. In: VEHITS. pp. 402–409 (2024). https://doi.org/10.5220/0012696400003702
-
[13]
In: 2022 IEEE International Symposium on Software 18 I
Ge, G., Sun, L., Li, Y.F.: A systematic approach to develop an autopi- lot sensor monitoring system for autonomous delivery vehicles based on the stpa method. In: 2022 IEEE International Symposium on Software 18 I. Aslam et al. Reliability Engineering Workshops (ISSREW). pp. 318–325. IEEE (2022). https://doi.org/10.1109/ISSREW55968.2022.00087
-
[14]
In: 2020 23rd Euromicro Conference on Digital System Design (DSD)
Grieser, J., Zhang, M., Warnecke, T., Rausch, A.: Assuring the safety of end-to- end learning-based autonomous driving through runtime monitoring. In: 2020 23rd Euromicro Conference on Digital System Design (DSD). pp. 476–483. IEEE (2020)
work page 2020
-
[15]
In: International Con- ference on Deep Learning Theory and Applications
Habib, N., Cho, Y., Buragohain, A., Rausch, A.: Towards exploring adversarial learning for anomaly detection in complex driving scenes. In: International Con- ference on Deep Learning Theory and Applications. pp. 35–55. Springer (2023). https://doi.org/10.1007/978-3-031-39059-3_3
-
[16]
Helsch, F., Aslam, I., Buragohain, A., Rausch, A.: Qualitative monitors based on the connected dependability cage approach. In: Proceedings of the 14th In- ternational Conference on Adaptive and Self-Adaptive Systems and Applications- Barcelona, Spain. pp. 46–55 (2022). https://doi.org/10.48550/arXiv.2307.06258
-
[17]
https://www.intelrealsense.com/depth-camera-d435f/,"Intel RealSense., (Accessed on 12/30/2024)
Intel: Depth camera d435f – intel®realsense™depth and tracking cam- eras. https://www.intelrealsense.com/depth-camera-d435f/,"Intel RealSense., (Accessed on 12/30/2024)
work page 2024
-
[18]
SAE international4970(724), 1–5 (2018)
International,S.:Taxonomyanddefinitionsfortermsrelatedtodrivingautomation systems for on-road motor vehicles. SAE international4970(724), 1–5 (2018). https://doi.org/10.4271/J3016_201806
-
[19]
ISO, Geneva, Switzerland (2018)
International Organization for Standardization (ISO): Road vehicles – Functional safety. ISO, Geneva, Switzerland (2018)
work page 2018
-
[20]
ISO, Geneva, Switzerland (June 2022), norm
International Organization for Standardization (ISO): Road vehicles — Safety of the intended functionality. ISO, Geneva, Switzerland (June 2022), norm
work page 2022
-
[21]
Kalra, N., Paddock, S.M.: Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transportation research part A: policy and practice94, 182–193 (2016)
work page 2016
-
[22]
ACM Transactions on Programming Languages and Systems4(3), 382–401 (1982)
Lamport, L., Shostak, R., Pease, M.: The byzantine generals problem. ACM Transactions on Programming Languages and Systems4(3), 382–401 (1982). https://doi.org/10.1145/357172.357176
-
[23]
In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
Lang, A.H., Vora, S., Caesar, H., Zhou, L., Yang, J., Beijbom, O.: Pointpillars: Fast encoders for object detection from point clouds. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. pp. 12697–12705 (2019). https://doi.org/10.1109/CVPR.2019.01298
-
[24]
In: 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES)
Li, M., Eckstein, L.: Fail-operational steer-by-wire system for autonomous vehi- cles. In: 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES). pp. 1–6. IEEE (2019). https://doi.org/10.1109/ICVES.2019.8906395
-
[25]
Autonomous mobility-on-demand systems for future ur- ban mobility,
Mauer, M., Gerdes, J.C., Lenz, B., Winner, H.: Autonomes Fahren: Technis- che, Rechtliche und Gesellschaftliche Aspekte. Springer Vieweg: Berlin/Heidelberg, Germany (2015). https://doi.org/10.1007/978-3-662-45854-9
-
[26]
Mauritz, M.: Engineering of Safe Autonomous Vehicles through Seamless Inte- gration of System Development and System Operation. Dr. Hut Verlag (2019). https://doi.org/10.21268/20200123-0
-
[27]
Mauritz, M., Howar, F., Rausch, A.: From simulation to operation: Using design time artifacts to ensure the safety of advanced driving assistance systems at run- time. In: Proceedings of the International Workshop on Modelling in Automotive Software Engineering, Ottawa, ON, Canada (2015)
work page 2015
-
[28]
Mauritz, M., Howar, F., Rausch, A.: Assuring the safety of advanced driver assis- tance systems through a combination of simulation and runtime monitoring. In: Proceeding of the International Symposium on Leveraging Applications of Formal Methods, Rhodes, Greece (2016) Connected Dependability Cage: Run-Time Monitoring for Safe AV 19
work page 2016
-
[29]
In: Proceeding of the FORMS/FORMAT: 10th Symposium on Formal Methods, Braunschweig, Germany (2014)
Mauritz, M., Rausch, A., Ina, S.: Dependable adas by combining design time testing and runtime monitoring. In: Proceeding of the FORMS/FORMAT: 10th Symposium on Formal Methods, Braunschweig, Germany (2014). https://doi.org/10.1007/978-3-319-47169-3_52
-
[30]
Messnarz,R.,Macher,G.,Stolfa,J.,Stolfa,S.:Highlyautonomousvehicle(system) design patterns–achieving fail operational and high level of safety and security. In: Systems, Software and Services Process Improvement: 26th European Conference, EuroSPI 2019, Edinburgh, UK, September 18–20, 2019, Proceedings 26. pp. 465–
work page 2019
-
[31]
https://doi.org/10.1007/978-3-030-28005-5_36
Springer (2019). https://doi.org/10.1007/978-3-030-28005-5_36
-
[32]
Applied Sciences11(21), 9881 (2021)
Rausch, A., Sedeh, A.M., Zhang, M.: Autoencoder-based semantic novelty detec- tion: towards dependable ai-based systems. Applied Sciences11(21), 9881 (2021). https://doi.org/10.3390/app11219881
-
[33]
In: 2020 Integrated Communications Navigation and Surveillance Conference (ICNS)
Sherry, L., Shortle, J., Donohue, G., Berlin, B., West, J.: Autonomous sys- tems design, testing, and deployment: Lessons learned from the deploy- ment of an autonomous shuttle bus. In: 2020 Integrated Communications Navigation and Surveillance Conference (ICNS). pp. 5D1–1. IEEE (2020). https://doi.org/10.1109/ICNS50378.2020.9222995
-
[34]
IEEE Transactions on Intel- ligent Vehicles7(2), 251–262 (2021)
Stolte, T., Ackermann, S., Graubohm, R., Jatzkowski, I., Klamann, B., Winner, H., Maurer, M.: Taxonomy to unify fault tolerance regimes for automotive systems: Defining fail-operational, fail-degraded, and fail-safe. IEEE Transactions on Intel- ligent Vehicles7(2), 251–262 (2021). https://doi.org/10.26083/tuprints-00022082
-
[35]
Autonomes Fahren: technische, rechtliche und gesellschaftliche Aspekte pp
Wachenfeld, W., Winner, H.: Die freigabe des autonomen fahrens. Autonomes Fahren: technische, rechtliche und gesellschaftliche Aspekte pp. 439–464 (2015). https://doi.org/110.1007/978-3-662-45854-9_21
work page 2015
-
[36]
Wong, A., Famuori, M., Shafiee, M.J., Li, F., Chwyl, B., Chung, J.: Yolo nano: A highly compact you only look once convolutional neural network for object detection. In: Fifth Workshop on Energy Efficient Machine Learning and Cognitive Computing-NeurIPS Edition (EMC2-NIPS). pp. 22–25 (2019). https://doi.org/10.1109/EMC2-NIPS53020.2019.00013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.