IntenBot: Flexible and Imprecise Multimodal Input for LLMs to Understand User Intentions for Casual and Human-Like HRI
Pith reviewed 2026-05-08 16:48 UTC · model grok-4.3
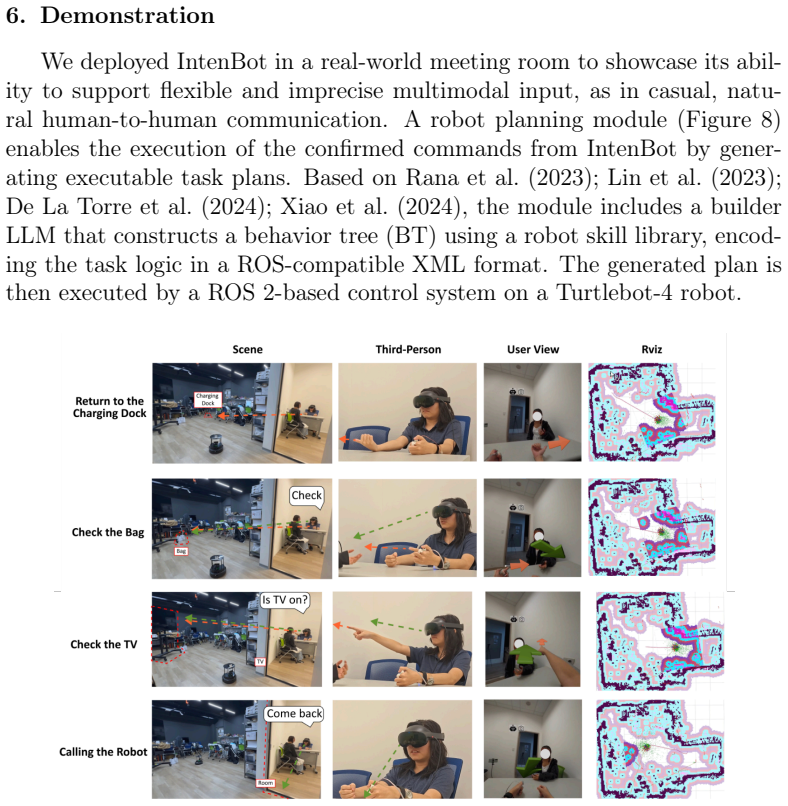
The pith
Large language models interpret casual voice, gaze, and pointing inputs to suggest robot instructions for user confirmation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
IntenBot uses the disambiguation capability of large language models to filter out irrelevant input modalities and imprecise input data from voice, gaze, and finger-pointing, generating potential instructions for user confirmation in XR environments.
What carries the argument
LLM disambiguation that filters irrelevant modalities and imprecise data to produce candidate instructions for user verification.
If this is right
- Casual combinations of input modalities become usable without extra effort from the user.
- Robot commands require less time, attention, and precision than explicit instructions.
- Non-voice inputs can fully replace or supplement spoken commands.
- The same filtering approach supports deployment on physical robots beyond the XR lab.
Where Pith is reading between the lines
- The method could reduce barriers for users who find precise pointing or speech difficult.
- Parameter tuning from simulation may need fresh calibration when moved to varied real-world lighting or user populations.
- Adding body posture or other sensors would likely strengthen the same disambiguation step.
- The pattern of letting an LLM propose options for quick confirmation may apply to other everyday AI interfaces that receive messy human signals.
Load-bearing premise
The angle range parameters measured in the simulated user study transfer directly to real XR settings and let the language model disambiguate inputs correctly.
What would settle it
An XR trial in which IntenBot's rate of producing the user's intended instruction from imprecise inputs falls below the rate of a baseline system that requires precise inputs.
Figures








read the original abstract
In natural human-to-human communication, multimodal user input is typically used to supplement explicit and complement implicit voice commands, with casualness allowing for flexible input modality combinations and tolerance for imprecise input data. For example, saying "I want that." with a casual glance at a bottle of water is clear enough in human-to-human communication as an implicit voice command accompanied by gaze and/or gestures, rather than an explicit one. To enable such a human-like interaction in human-robot interaction (HRI), we propose a system, IntenBot, to understand user intentions from flexible and imprecise multimodal input, including voice, gaze, and finger-pointing, in XR. The disambiguation capability of large language models (LLMs) is used to filter out irrelevant input modalities and imprecise input data, generating potential instructions for user confirmation. The flexible and imprecise multimodal input enables casual, human-like interaction with robots, reducing time, effort, and attention, and could also be used as non-voice input. We conducted an informative user behavior study in a simulated environment to understand users' natural be- havior in flexibly interacting with a robot using multimodal input and to obtain appropriate angle range parameters for gaze and finger-pointing. An XR study was then performed to evaluate the performance of IntenBot, compared with other methods. We also deployed IntenBot on a physical robot to showcase its real-world applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces IntenBot, a system for interpreting user intentions in XR-based human-robot interaction from flexible and imprecise multimodal inputs (voice, gaze, and finger-pointing). It relies on LLMs to disambiguate inputs by filtering irrelevant modalities and imprecise data, then generates candidate instructions for user confirmation. The work describes a simulated user behavior study to derive angle-range parameters for gaze and pointing, an XR evaluation comparing IntenBot to other methods, and a physical robot deployment to demonstrate real-world use.
Significance. If validated with quantitative evidence, the approach could advance casual HRI by enabling low-effort, natural interactions that tolerate imprecision, leveraging LLMs for multimodal fusion in a timely way. The simulated study for parameter setting and physical deployment are positive elements, but the overall significance depends on demonstrating reliable transfer to real XR conditions and measurable performance gains over baselines.
major comments (2)
- [Abstract and XR evaluation description] Abstract and XR evaluation description: The paper states that an XR study was performed to evaluate the performance of IntenBot compared with other methods, yet supplies no quantitative results, error metrics, success rates, latency measures, or statistical comparisons. Without these, the central claim that LLM disambiguation effectively handles flexible and imprecise inputs cannot be assessed.
- [User behavior study section] User behavior study section: The angle range parameters for gaze and finger-pointing are derived from a simulated user behavior study and used as thresholds to encode inputs for the LLM. The manuscript does not address or test transferability to real XR hardware (e.g., tracking jitter, latency, field-of-view limits), which the skeptic note correctly identifies as a load-bearing assumption that could introduce systematic errors in the textual encoding step.
minor comments (2)
- [Abstract] Abstract: Typo in 'be- havior' (should be 'behavior').
- [Overall manuscript] Overall manuscript: Specific LLM prompts for disambiguation and the exact textual encoding scheme for multimodal inputs (e.g., how angle ranges are represented) are not detailed, hindering reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the paper to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract and XR evaluation description] Abstract and XR evaluation description: The paper states that an XR study was performed to evaluate the performance of IntenBot compared with other methods, yet supplies no quantitative results, error metrics, success rates, latency measures, or statistical comparisons. Without these, the central claim that LLM disambiguation effectively handles flexible and imprecise inputs cannot be assessed.
Authors: We agree that the XR evaluation section requires more explicit quantitative reporting to substantiate the claims. The manuscript describes the study setup and comparisons but presents results primarily in qualitative terms. In the revised version, we will expand the abstract and evaluation section with a dedicated results table including success rates across input modality combinations, error metrics for disambiguation, latency measurements, and statistical comparisons (e.g., t-tests or ANOVA) against baseline methods. This will directly support the central claim regarding LLM-based handling of flexible inputs. revision: yes
-
Referee: [User behavior study section] User behavior study section: The angle range parameters for gaze and finger-pointing are derived from a simulated user behavior study and used as thresholds to encode inputs for the LLM. The manuscript does not address or test transferability to real XR hardware (e.g., tracking jitter, latency, field-of-view limits), which the skeptic note correctly identifies as a load-bearing assumption that could introduce systematic errors in the textual encoding step.
Authors: The simulated study was used to derive ecologically valid angle ranges based on observed natural user behavior, which were then applied as encoding thresholds. We acknowledge that transfer to real XR hardware (including jitter, latency, and FOV constraints) is not explicitly tested or discussed. In the revision, we will add a dedicated paragraph in the user behavior study section and a limitations subsection addressing these factors, explaining how the XR evaluation (conducted on actual hardware) and physical robot deployment provide partial real-world grounding. We will also note that systematic errors from hardware variation remain a valid concern for future calibration studies. revision: partial
Circularity Check
No circularity: parameters from independent study, LLM treated as external
full rationale
The paper obtains angle-range parameters for gaze and pointing from a distinct simulated user behavior study, then feeds those fixed values as inputs into the IntenBot pipeline. The LLM disambiguation step is invoked as an external capability rather than derived from the same data. No equations, self-citations, or fitted predictions reduce the claimed output back to the inputs by construction. The subsequent XR evaluation is a separate empirical test. This satisfies the default expectation of a self-contained system description.
Axiom & Free-Parameter Ledger
free parameters (1)
- angle range parameters for gaze and finger-pointing
axioms (1)
- domain assumption LLMs possess sufficient disambiguation capability to filter irrelevant modalities and imprecise data in real time
invented entities (1)
-
IntenBot
no independent evidence
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2307.06135
Sayplan: Grounding large language models using 3d scene graphs for scalable task planning. arXiv preprint arXiv:2307.06135 . Roider, F., Reisig, L., Gross, T., 2018. Just look: The benefits of gaze- activated voice input in the car, in: Adjunct Proceedings of the 10th Inter- national Conference on Automotive User Interfaces and Interactive Vehic- ular App...
-
[2]
The users voice input
-
[3]
The users gaze information (i.e., the object currently in the õ!users line of sight)
-
[4]
The possible objects indicated by the user s right and left thumb õ!and index finger (4 inputs)
-
[5]
The current room of the user
-
[6]
The current position of the user
-
[7]
Scene objects. # Priority Information Explanation: You may receive additional structured inputs like this: High Priority Rooms: Living room, Dining room Low Priority Rooms: Kitchen High Priority Objects: *Living room*: sushi, TV Low Priority Objects: *Kitchen*: CoffeeMaker, Toaster This information indicates where the user s current attention is õ!focused...
-
[8]
õ! You MUST generate exactly 9 possible tasks; you cannot generate õ!fewer than 9
You **MUST** generate exactly 9 tasks, no fewer than 9 tasks , õ!and Rank them in order of likelihood from highest to lowest. õ! You MUST generate exactly 9 possible tasks; you cannot generate õ!fewer than 9
-
[9]
Multi-object tasks **MUST** be grouped together if the user õ!refers to multiple objects in a single command. Example: If the user says, Get the table ObjA and ObjB , you **MUST õ!** process both objects in a single task, NOT as separate õ!tasks. Correct:Task: Get the ObjA and ObjB [Interact Object: ObjA, ObjB] INVALID:Task: Get the ObjA[Interact Object: ...
-
[10]
You **MUST NOT** assume a single best action. If the user s õ!intent is unclear, you should infer the most likely õ!intended action while also suggesting similar or õ!alternative tasks to ensure a total of 9 tasks. Example: Users voice input:Bring ABC to that room , but they õ!simultaneously point to 3-4 different rooms. Since it is unclear which room the...
-
[11]
Correct:Clean all trash from the table and organize the items
DO NOT break down long-horizon tasks If the user requests a long-term task (e.g., Clean the room), you õ!must describe the entire cleaning process as a single task õ!rather than splitting it into multiple small tasks. Correct:Clean all trash from the table and organize the items. Incorrect:Remove the empty cup,Throw away the trash,Wipe the õ!table(tasks s...
-
[12]
Tasks must match scene objects All interactable objects, and object locations must exactly match õ!the provided scene object list
-
[13]
Destination Rules The destination **MUST** be: A room,like a dining room , hallway or other room or just **User** ( õ!if the user wants the object brought to them)
-
[14]
Treat [T2] as a õ!refinement of [T1], and merge them when possible
Proper handling of [T1] and [T2] [T1] and [T2] represent sequential user inputs. Treat [T2] as a õ!refinement of [T1], and merge them when possible. Output Format: [Chain_of_Thought: < Step-by-step reasoning process to determine the õ!best tasks, including how many objects the user wants >] [Likely object:< All possible object sort from high to low priori...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.