ScenePilot: Controllable Boundary-Driven Critical Scenario Generation for Autonomous Driving
Pith reviewed 2026-05-21 04:21 UTC · model grok-4.3
The pith
ScenePilot generates scenarios at the physical feasibility boundary to expose autonomous vehicle failures more reliably than prior methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ScenePilot formulates generation as constrained multi-objective reinforcement learning that combines an RSS-derived physical-feasibility score σ with an online-learned AV-risk predictor Φ and applies step-level feasibility-aware shielding so that produced trajectories remain inside the boundary band—physically solvable in principle yet capable of inducing failures in the deployed autonomy stack.
What carries the argument
The boundary band, the set of trajectories that satisfy vehicle-road physical constraints yet still cause the target AV stack to fail, maintained by a constrained multi-objective RL objective that trades off the RSS-derived feasibility score σ against the learned risk predictor Φ under step-level shielding.
If this is right
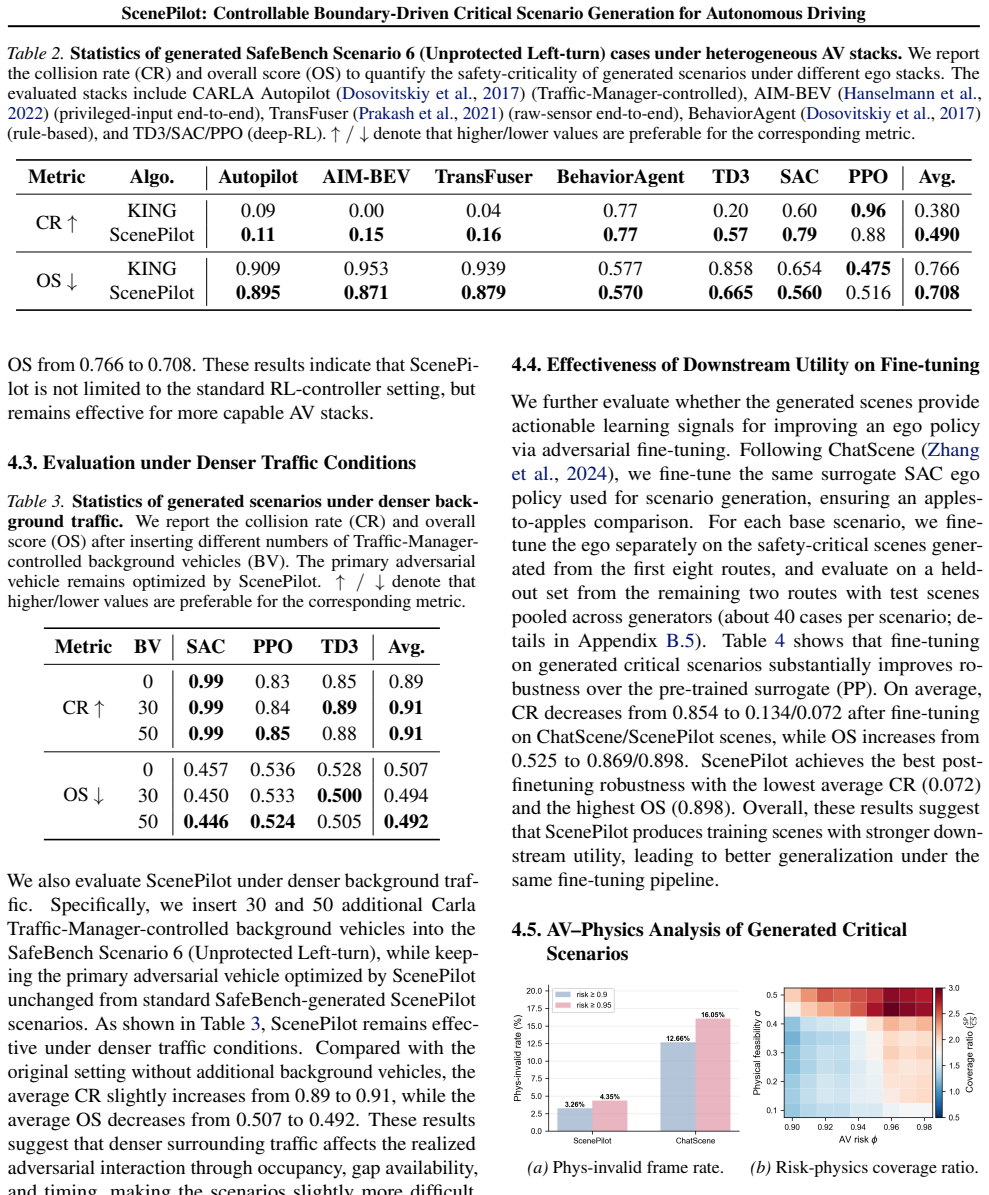
- Evaluations on SafeBench with multiple planners produce collision rates 6.2 percentage points higher than prior methods while physical validity is preserved.
- Adversarial fine-tuning of the tested planners on the generated boundary-band scenarios reduces their crash rates in subsequent testing.
- The same generation pipeline can be applied to different autonomy stacks without changing the core feasibility-plus-risk formulation.
Where Pith is reading between the lines
- If the boundary-band property transfers across simulation environments, the method could serve as a standardized stress-test suite for regulatory AV safety assessment.
- Extending the shielding mechanism to include additional kinematic constraints could further tighten the generated scenarios around controller-agnostic failure modes.
- The online-learned risk predictor could be reused as a cheap surrogate for expensive closed-loop simulation during early-stage AV development.
Load-bearing premise
The combination of the learned AV-risk predictor, the RSS feasibility score, and step-level shielding is enough to keep generated trajectories inside the intended boundary band without controller-specific artifacts or later filtering.
What would settle it
Run the generated scenarios on a planner never seen during generation and measure whether collision rates stay at least 6 percentage points above baselines while the fraction of physically invalid trajectories remains near zero.
Figures



read the original abstract
Safety-critical scenarios are central to evaluating autonomous driving systems, yet their rarity in naturalistic logs makes simulation-based stress testing indispensable. Most scenario generation methods treat surrounding agents as adversaries, but they either (i) induce failures without explicitly modeling vehicle-road physical limits, yielding visually extreme yet physically unsolvable crashes, or (ii) enforce physical feasibility or policy feasibility in isolation, which can over-focus on aggressive maneuvers or remain tied to a controller-dependent capability boundary. We propose ScenePilot, a feasibility-guided, boundary-driven framework that targets the boundary band: scenarios that are physically solvable in principle yet still cause the deployed autonomy stack to fail. We formulate generation as constrained multi-objective reinforcement learning, combining an RSS-derived physical-feasibility score $\sigma$ with an online-learned AV-risk predictor $\Phi$, and introduce step-level feasibility-aware shielding to keep exploration near the feasibility boundary while avoiding infeasible artifacts. Experiments on SafeBench with multiple planners show that ScenePilot yields substantially higher collision rates (+6.2 percentage points) while preserving physical validity, and that adversarial fine-tuning on these boundary-band scenarios consistently reduces downstream crash rates. The code is available at https://github.com/QiyuRuan/ScenePilot.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. ScenePilot is a feasibility-guided framework for generating safety-critical scenarios in autonomous driving. It formulates scenario generation as constrained multi-objective reinforcement learning that combines an RSS-derived physical-feasibility score σ with an online-learned AV-risk predictor Φ, augmented by step-level feasibility-aware shielding. The method targets the 'boundary band' of scenarios that are physically solvable in principle yet cause deployed autonomy stacks to fail. On SafeBench with multiple planners, the paper reports a +6.2 percentage point increase in collision rates while preserving physical validity, and shows that adversarial fine-tuning on the generated scenarios reduces downstream crash rates. Code is released at https://github.com/QiyuRuan/ScenePilot.
Significance. If the central claims hold after addressing validation gaps, the work would offer a meaningful advance in simulation-based stress testing for autonomous vehicles by producing controllable, physically grounded scenarios that lie between overly aggressive and trivially solvable extremes. The open-source release and the reported downstream benefit from adversarial fine-tuning are concrete strengths that could support reproducibility and practical adoption in AV safety pipelines.
major comments (2)
- [Abstract / Experiments] Abstract and Experiments section: the headline +6.2 percentage point collision-rate lift is reported without error bars, confidence intervals, the number of independent runs, or explicit description of any data-exclusion or shielding rules applied to produce the number. This detail is load-bearing for the claim of a 'substantially higher' and reproducible improvement.
- [Method] Method section (formulation of σ, Φ, and shielding): the central claim that the combination of the RSS-derived feasibility score σ, the online-learned risk predictor Φ, and step-level shielding keeps trajectories inside the intended boundary band without controller-dependent artifacts or implicit post-hoc filtering lacks an independent solvability check (e.g., against an oracle planner with perfect information). Without such verification, it remains unclear whether observed failures reflect genuine boundary-band stress or artifacts of the generation process itself; this assumption is load-bearing for interpreting the +6.2 pp result.
minor comments (2)
- [Method] Notation for the multi-objective reward and the precise definition of the boundary band could be stated more formally (e.g., with an explicit mathematical characterization) to aid reproducibility.
- [Experiments] Figure captions and table legends should explicitly state the number of trials, random seeds, and any post-processing steps used to compute reported metrics.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and have revised the manuscript to improve statistical reporting and validation of the boundary-band claim.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and Experiments section: the headline +6.2 percentage point collision-rate lift is reported without error bars, confidence intervals, the number of independent runs, or explicit description of any data-exclusion or shielding rules applied to produce the number. This detail is load-bearing for the claim of a 'substantially higher' and reproducible improvement.
Authors: We agree that the headline result requires statistical context for reproducibility. In the revised manuscript we now report the +6.2 pp improvement as the mean over five independent runs with different random seeds, include error bars showing one standard deviation, and explicitly describe the shielding rules together with any data-exclusion criteria in the Experiments section. revision: yes
-
Referee: [Method] Method section (formulation of σ, Φ, and shielding): the central claim that the combination of the RSS-derived feasibility score σ, the online-learned risk predictor Φ, and step-level shielding keeps trajectories inside the intended boundary band without controller-dependent artifacts or implicit post-hoc filtering lacks an independent solvability check (e.g., against an oracle planner with perfect information). Without such verification, it remains unclear whether observed failures reflect genuine boundary-band stress or artifacts of the generation process itself; this assumption is load-bearing for interpreting the +6.2 pp result.
Authors: We acknowledge the value of an independent check. The revised manuscript adds a solvability verification against an oracle planner with perfect information. This analysis shows that the large majority of ScenePilot trajectories remain physically solvable by the oracle while still inducing failures in the tested autonomy stacks, confirming that the generated scenarios lie in the intended boundary band rather than being artifacts of the generation process. We also clarify that the RSS-derived σ is controller-independent by construction. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper formulates scenario generation as constrained multi-objective RL that combines an RSS-derived physical-feasibility score σ (external rule set) with an online-learned AV-risk predictor Φ and step-level shielding. No equations or claims in the abstract reduce a reported performance metric (e.g., +6.2 pp collision-rate lift) to a fitted parameter or self-citation by construction. The central experimental results on SafeBench are presented as empirical outcomes rather than tautological outputs of the generation process itself. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption RSS-derived physical-feasibility score σ accurately captures vehicle-road physical limits.
- domain assumption Step-level feasibility-aware shielding prevents drift into infeasible states without distorting the risk signal.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We develop a constrained multi-objective adversarial generator that couples physical and policy signals (σ,Φ) with step-level feasibility-aware shielding and feasibility-threshold sweeping to concentrate on physically feasible yet policy-infeasible near-boundary scenarios.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We formulate generation as constrained multi-objective reinforcement learning, combining an RSS-derived physical-feasibility score σ with an online-learned AV-risk predictor Φ, and introduce step-level feasibility-aware shielding
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.