From Abstraction to Instantiation: Learning Behavioral Representation for Vision-Language-Action Model
Pith reviewed 2026-05-22 06:01 UTC · model grok-4.3
The pith
Learning a single temporally coherent behavior representation allows VLA models to maintain consistent performance across distribution shifts in robotic manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
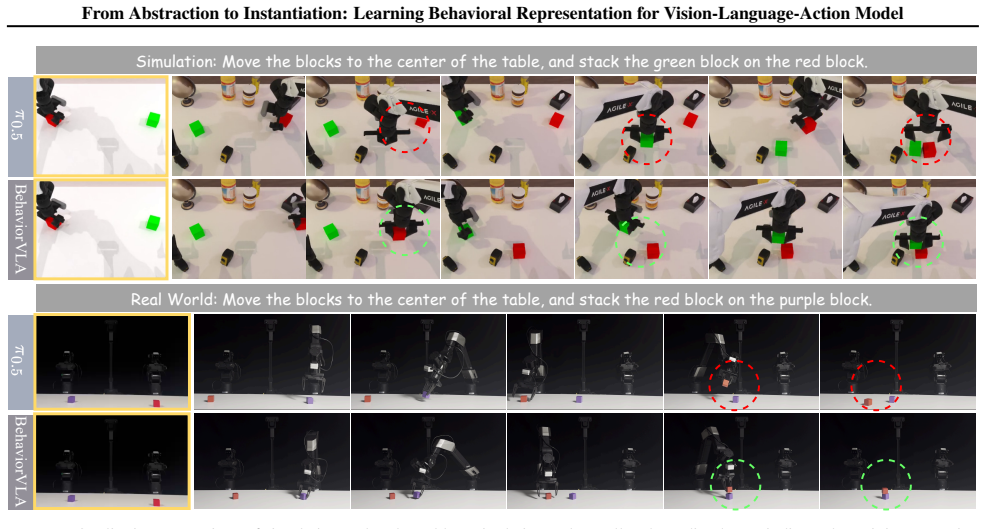
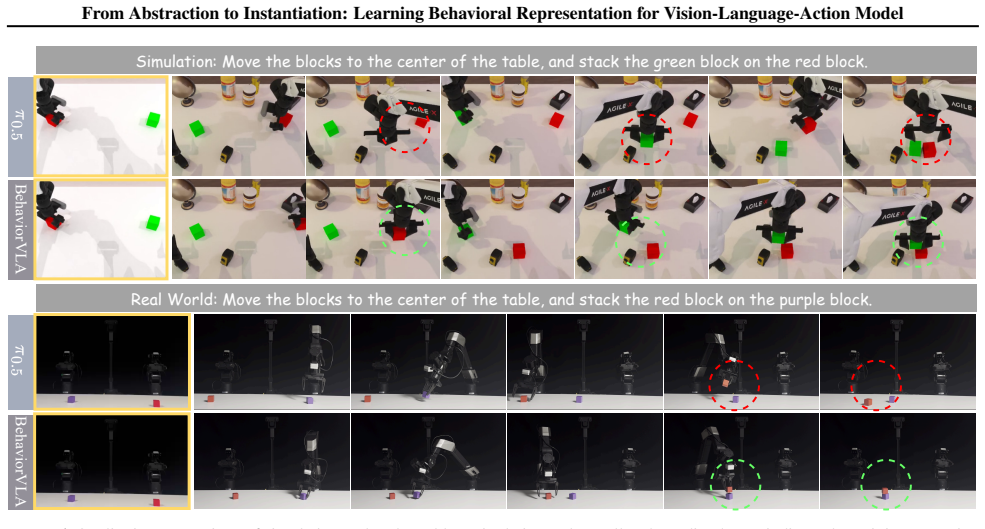
BehaviorVLA aggregates long-horizon trajectory information into a unified behavior representation using a causal Mamba-based Visuomotor Behavior Encoder, then decodes it into precise actions with a Phase-conditioned Behavior Decoder that aligns task-level priors with real-time execution progress.
What carries the argument
The Visuomotor Behavior Encoder, a causal Mamba architecture that turns entire trajectories into one coherent behavior token, combined with the Phase-conditioned Behavior Decoder that conditions action generation on both the behavior token and current phase progress.
If this is right
- State-of-the-art success rates of 58% on RoboTwin 2.0, 98% on LIBERO, and 4.36 average length on CALVIN.
- Matching OpenVLA-OFT performance in sim-to-real transfer while using only half the demonstration data.
- Improved robustness to distribution shifts through temporally coherent representations rather than action-centric latent variables.
- More data-efficient learning for vision-language-action control in complex scenarios.
Where Pith is reading between the lines
- If the unified representation truly captures task essence independent of specific execution paths, it could transfer to new robot morphologies with minimal retraining.
- Testing on longer-horizon tasks or multi-step planning problems would reveal whether the single-vector summary loses necessary sequencing information.
- Combining this encoder with larger language models might further improve instruction following in novel environments.
Load-bearing premise
A single causal Mamba encoder can compress long-horizon trajectories into one behavior representation that stays consistent and informative across different environments and tasks without losing critical details.
What would settle it
Running BehaviorVLA on a benchmark with extreme distribution shifts, such as new object shapes or lighting conditions not seen in training, and observing whether success rates drop to levels comparable to standard VLA models without the proposed encoder.
Figures






read the original abstract
Vision-Language-Action (VLA) models often suffer from performance degradation under distribution shifts, as they struggle to learn generalized behavior representations across varying environments. While existing approaches attempt to construct behavior representations through action-centric latent variables, they are often limited by short-horizon temporal fragmentation and static execution-alignment, leading to inconsistent behaviors in complex scenarios. To address these limitations, we propose \textbf{BehaviorVLA}, a framework that facilitates robust manipulation through the learning of a temporally coherent behavioral representations. Our approach features two symmetric components: (1) the \textbf{Visuomotor Behavior Encoder (VBE)}, which utilizes a causal Mamba-based architecture to aggregate long-horizon trajectory information into a unified behavior representation; and (2) the \textbf{Phase-conditioned Behavior Decoder (PBD)}, which decodes this representation into precise actions by dynamically aligning task-level priors with real-time execution progress. Experiments on RoboTwin 2.0, LIBERO, and CALVIN demonstrate state-of-the-art success rates of 58\%, 98\%, and 4.36 (Avg.Len), respectively. Notably, in real-world sim-to-real transfer, BehaviorVLA matches the performance of OpenVLA-OFT using only 50\% of the demonstration data, showcasing its superior data efficiency and generalization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces BehaviorVLA, a Vision-Language-Action framework consisting of a causal Mamba-based Visuomotor Behavior Encoder (VBE) that aggregates long-horizon trajectories into a single unified behavior representation and a Phase-conditioned Behavior Decoder (PBD) that decodes this representation into actions by aligning task priors with execution progress. It reports state-of-the-art success rates of 58% on RoboTwin 2.0, 98% on LIBERO, and 4.36 average length on CALVIN, plus matching OpenVLA-OFT performance in sim-to-real transfer using only 50% of the demonstration data.
Significance. If the unified representation produced by the VBE remains informative and non-collapsed across distribution shifts, the approach could meaningfully improve generalization and data efficiency in VLA models. The choice of causal Mamba for long-horizon aggregation is technically interesting and could influence future work on temporally coherent behavior modeling.
major comments (3)
- [§3.2] §3.2 (VBE architecture): the manuscript provides no auxiliary loss, contrastive term, or information-bottleneck analysis to enforce that the single Mamba state remains task-informative rather than collapsing to coarse priors under distribution shifts. This is load-bearing for the robustness and 50%-data-efficiency claims, as performance gains could instead arise from the PBD or dataset-specific tuning.
- [Table 2] Table 2 (main results): success rates and average lengths are reported without error bars, number of evaluation seeds, or statistical tests, so it is impossible to determine whether the reported margins over OpenVLA and other baselines are reliable.
- [§4.3] §4.3 (sim-to-real ablation): the 50% data-efficiency result is presented without component ablations that isolate the VBE representation from the phase-conditioning mechanism or other architectural choices, leaving open the possibility that the gains are not attributable to the claimed temporally coherent representation.
minor comments (2)
- Notation for the unified behavior representation (denoted variously as z or h in the text) is introduced without a single consistent equation or diagram reference, complicating traceability from encoder output to decoder input.
- [Figure 3] Figure 3 caption does not specify the exact trajectory length or number of Mamba layers used in the visualized state evolution, reducing clarity of the temporal coherence argument.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. We have carefully considered each comment and provide point-by-point responses below. We believe these revisions will enhance the clarity and rigor of our work.
read point-by-point responses
-
Referee: [§3.2] §3.2 (VBE architecture): the manuscript provides no auxiliary loss, contrastive term, or information-bottleneck analysis to enforce that the single Mamba state remains task-informative rather than collapsing to coarse priors under distribution shifts. This is load-bearing for the robustness and 50%-data-efficiency claims, as performance gains could instead arise from the PBD or dataset-specific tuning.
Authors: We agree that an explicit mechanism to prevent representation collapse would strengthen the claims regarding the VBE's robustness. While the causal Mamba's state update rules and the reconstruction objective through the PBD implicitly encourage informative representations, we acknowledge the absence of dedicated analysis. In the revised manuscript, we will include an information-bottleneck analysis and report the mutual information between the VBE state and task-specific variables to demonstrate that the representation remains task-informative across shifts. revision: yes
-
Referee: [Table 2] Table 2 (main results): success rates and average lengths are reported without error bars, number of evaluation seeds, or statistical tests, so it is impossible to determine whether the reported margins over OpenVLA and other baselines are reliable.
Authors: We concur that the lack of error bars and statistical validation makes it difficult to assess the significance of the improvements. We will rerun the evaluations with multiple random seeds (at least 5) and report means with standard deviations. Additionally, we will include p-values from appropriate statistical tests comparing BehaviorVLA to baselines in the updated Table 2. revision: yes
-
Referee: [§4.3] §4.3 (sim-to-real ablation): the 50% data-efficiency result is presented without component ablations that isolate the VBE representation from the phase-conditioning mechanism or other architectural choices, leaving open the possibility that the gains are not attributable to the claimed temporally coherent representation.
Authors: The referee correctly points out that the current ablation study does not fully isolate the contributions of the VBE. To address this, we will expand the ablation experiments in §4.3 to include variants where the VBE is replaced with a standard encoder or where phase conditioning is removed, while keeping other components fixed. This will help attribute the data-efficiency gains specifically to the temporally coherent representation learned by the VBE. revision: yes
Circularity Check
No circularity: empirical architecture proposal with benchmark validation
full rationale
The paper proposes BehaviorVLA as a new VLA framework consisting of a causal Mamba VBE for long-horizon aggregation into a unified representation and a phase-conditioned PBD decoder. All performance claims (SOTA rates on RoboTwin 2.0, LIBERO, CALVIN; 50% data efficiency in sim-to-real) are presented as direct experimental outcomes rather than derived predictions. No equations, self-definitional reductions, fitted parameters renamed as predictions, or load-bearing self-citations appear in the abstract or described chain. The work is self-contained as an architectural contribution validated on standard benchmarks.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.