Soft Mobility Theory
Pith reviewed 2026-05-25 02:36 UTC · model grok-4.3
The pith
A hyperelastic body in Stokes flow obeys a configuration-dependent ODE for its generalized coordinates derived via virtual power and reciprocity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Applying the principle of virtual power and the Lorentz reciprocal theorem to a hyperelastic body in a background Stokes flow yields a configuration-dependent ordinary differential equation for the generalized coordinates of the body. This soft mobility equation extends classical rigid-body mobility theory in that the mobility, elastic, body-force, and flow-coupling tensors all depend explicitly on the instantaneous deformation.
What carries the argument
The soft mobility equation, a configuration-dependent ODE obtained by combining virtual power with the Lorentz reciprocal theorem on a hyperelastic body.
If this is right
- The theory applies to hydrodynamically interacting spheres connected by springs via the Rotne-Prager-Yamakawa mobility approximation.
- Simulations are end-to-end differentiable, allowing gradient-based inverse design.
- The known asymptotic optimum for a three-sphere swimmer is recovered.
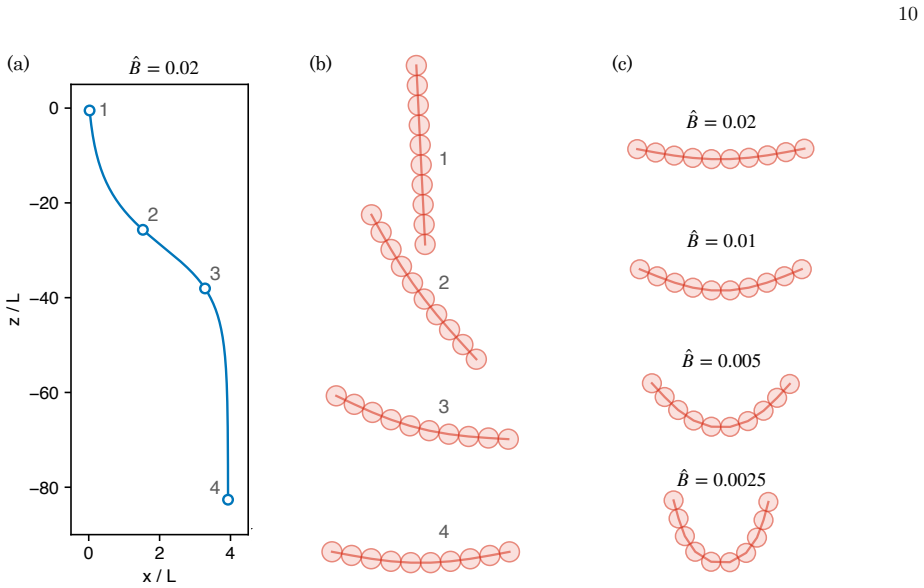
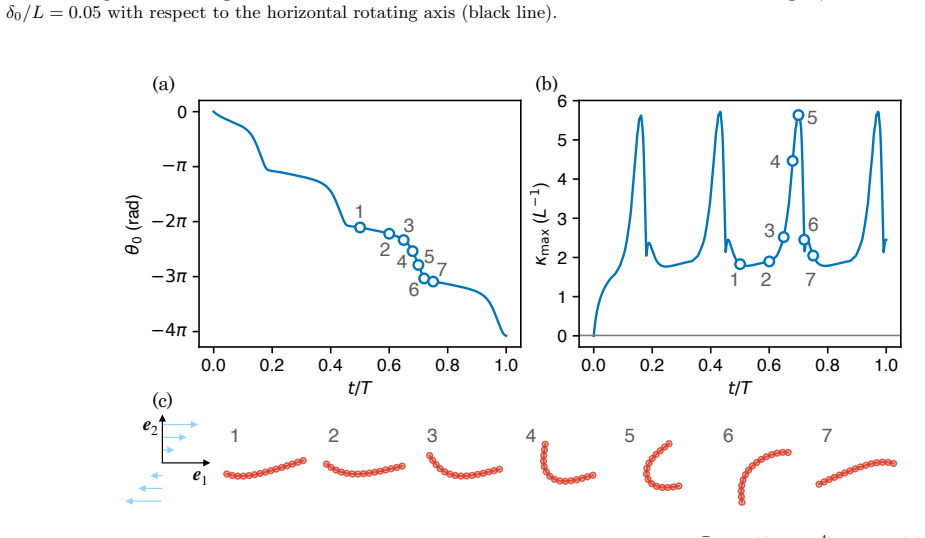
- A soft gyrotactic surfer can be designed that ascends faster than its rigid counterpart in Taylor-Green flow.
Where Pith is reading between the lines
- The differentiable formulation could be used to optimize continuous elastic filaments or membranes beyond discrete sphere models.
- The same virtual-power plus reciprocity approach might extend to non-Newtonian fluids if an appropriate reciprocal theorem holds.
- Direct experimental tracking of deformation in a known flow would provide a quantitative test of the tensor dependence on configuration.
Load-bearing premise
The body can be represented by a finite set of generalized coordinates whose current values fully determine all mobility, elastic, body-force, and flow-coupling tensors.
What would settle it
A measured trajectory of a three-sphere elastic assembly in controlled shear flow that deviates from the ODE prediction at measurable deformation amplitudes.
Figures



read the original abstract
Predicting how a deformable body moves and deforms in a viscous flow underlies problems ranging from microorganism locomotion to soft microrobotics, yet existing frameworks are either problem-specific or ill-suited to inverse design. We propose the soft mobility theory: applying the principle of virtual power and the Lorentz reciprocal theorem to a hyperelastic body in a background Stokes flow yields a configuration-dependent ordinary differential equation for the generalized coordinates of the body. This soft mobility equation extends classical rigid-body mobility theory in that the mobility, elastic, body-force, and flow-coupling tensors all depend explicitly on the instantaneous deformation. We specialize the framework to assemblies of hydrodynamically interacting spheres connected by elastic springs, using the Rotne-Prager-Yamakawa approximation to compute the mobility, and validate it on canonical problems spanning rigid and flexible bodies in quiescent and shear flows. An open-source JAX implementation makes entire simulations end-to-end differentiable. This allows efficient gradient-based inverse design: as proofs of concept, we recover the asymptotic optimum of a three-sphere swimmer and design a soft gyrotactic "surfer" that exploits passive deformation to ascend faster than its rigid counterpart in a Taylor-Green flow.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes 'soft mobility theory,' which applies the principle of virtual power and the Lorentz reciprocal theorem to a hyperelastic body in background Stokes flow to obtain a configuration-dependent ODE for its generalized coordinates. This extends rigid-body mobility by rendering the mobility, elastic, body-force, and flow-coupling tensors explicit functions of instantaneous deformation. The framework is specialized to hydrodynamically interacting spheres linked by elastic springs (using the Rotne-Prager-Yamakawa approximation), validated on rigid/flexible bodies in quiescent and shear flows, and implemented in open-source end-to-end differentiable JAX code that enables gradient-based inverse design (e.g., recovering the three-sphere swimmer optimum and designing a soft gyrotactic surfer).
Significance. If the central reduction holds, the work supplies a general, computationally tractable framework for reduced-order modeling of soft bodies in low-Re flow that unifies classical mobility theory with hyperelasticity. The explicit release of differentiable code and the concrete inverse-design demonstrations are concrete strengths that lower the barrier to optimization in soft microrobotics and biological locomotion.
minor comments (3)
- Abstract, paragraph 2: the claim that all tensors are 'computed from the instantaneous deformation' is stated without a one-sentence pointer to the key steps of the virtual-power/Lorentz reduction; adding this would improve readability without altering the technical content.
- The validation section (as summarized) reports canonical problems but does not indicate whether quantitative error metrics (e.g., L2 deviation from known rigid-body limits or analytic solutions) are tabulated; including such metrics would strengthen the reproducibility claim.
- The JAX implementation is highlighted as a strength; the manuscript should explicitly state the repository URL and licensing in the main text or a dedicated 'Code availability' paragraph.
Simulated Author's Rebuttal
We thank the referee for their positive and constructive summary of the manuscript, which accurately captures the core contribution of soft mobility theory, its specialization to spring-connected spheres, and the value of the open-source differentiable implementation for inverse design. The recommendation for minor revision is noted; however, no specific major comments were provided in the report.
Circularity Check
Derivation applies standard theorems without reduction to inputs
full rationale
The central derivation applies the principle of virtual power and Lorentz reciprocal theorem to obtain a configuration-dependent ODE for generalized coordinates of a hyperelastic body in Stokes flow. All mobility, elastic, body-force, and flow-coupling tensors are stated to be determined directly from the instantaneous deformation via the external Rotne-Prager-Yamakawa approximation for the sphere-spring specialization. No parameter is fitted to data within the paper and then relabeled as a prediction, no self-citation chain supports a uniqueness claim, and the framework is validated against independent canonical cases with released end-to-end code. The derivation chain is therefore self-contained against external benchmarks and does not reduce to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Principle of virtual power applies to a hyperelastic body in Stokes flow
- standard math Lorentz reciprocal theorem holds for the background Stokes flow
Reference graph
Works this paper leans on
-
[4]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[8]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[12]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[16]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[20]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[24]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[28]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
-
[29]
We attach to it the framework (e1,e2,e3)
Body Reference configuration of body X in the volume !0 and ω!0 its boundary. We attach to it the framework (e1,e2,e3). The body deform into x=ω(X,t), with F=ωx/ωXthe deformation gradient tensor. The volume becomes !t. We assume an hyperelastic material such that S(E), the second Piola—Kirchho ”stress tensor, derives from the energy W(E)( i . e . , S=ωW/ωE...
-
[30]
Background flow Because the body is at scale below the Kolmogorov scale, the background flow field u→(r) can be approximated by its linearization around a reference position r0 u→ (r)↑u→ 0 +ε→ 0 ↓(r→r0)+ E→ 0 ·(r→r0), (1) with ε→ 0 =1 2↔↓ u→ the angular velocity of the flow and E→ 0 =1 2(↔u→ +↔Tu→) the rate-of-strain tensor. B. Body
-
[31]
Static equilibrium We want to determine the velocity of the body as a function of the surface forces Fs, body forces Fv, and its elastic properties. The equation of static equilibrium can be written ↔·P+Fv =0 , in!t, (2) P·N = Fs, onω!t, (3) which states the body forces Fvbalance the internal elastic forces and the stress is continuous at the interface so...
-
[32]
The compatible velocity field is noted V↑(X)
Principle of virtual power We use the principle of virtual power, which states that the internal virtual power is equal to the power of the external forces for any compatible velocity field. The compatible velocity field is noted V↑(X). The principle of virtual power can be written ∫ !0 S:˙E↑ dV= ∫ !0 Fv·V↑ dV+ ∫ ω!0 Fs·V↑ dS, (4) with the strain rate assoc...
work page 2020
-
[33]
We thus haveF s =J sfs withJ s the Jacobian of the surface deformation Js =∥F −⊤ ·N∥det(F).(A2)
Surface Jacobian The surface integral can also be expressed in the deformed configuration Z ∂Ω0 Fs ·V ∗ dS= Z ∂Ωt fs ·V ∗ ds= Z ∂Ω0 Jsfs ·V ∗ dS,(A1) withf s =σ·nthe traction (in the deformed configuration), the force exerted by the fluid on the body, whereσis the Cauchy stress tensor. We thus haveF s =J sfs withJ s the Jacobian of the surface deformation...
-
[34]
Boundary integral equation The hydrodynamic tractionf s(z) at a pointz∈∂Ω t is determined by the boundary integral formulation of the Stokes equations [34]. By linearity, the surface traction and the surface velocity are related through u(z) =− 1 4πµ Z ∂Ωt G(y−z)·f s(y) ds(y) + 1 4π Z ∂Ωt u(y)·T(y−z)·n(y) ds(y),(A3) =− 1 8πµ Z ∂Ωt G(y−z)·f s(y) ds(y) + 1 ...
-
[35]
Galerkin discretization Equation (14) is a weak formulation on infinite-dimensional spaceV. To obtain a finite-dimensional system, we restrict˙χto a subspaceV n ⊂Vspanned bynbasis functions{V j}and write ˙χ(X, t) = nX j=1 ˙aj(t)V j(X).(A7) 18 Testing Eq. (14) with eachV i and using the linearity inu ∞ 0 ,ω ∞ 0 , andE ∞ 0 yields the projected system ˆR· ˙a...
-
[36]
Bortz equation The orientation of a rigid body in three dimensions is parameterized by the Rodrigues vectorΘ∈R 3: its direction ˆΘ=Θ/Θ (with Θ =∥Θ∥) is the rotation axis and its magnitude Θ is the rotation angle. The corresponding rotation matrix is given by the Euler–Rodrigues formula R(Θ) = cos Θ1+ sin Θ [ ˆΘ]× + (1−cos Θ) ˆΘ⊗ ˆΘ,(B1) with⊗the outer pro...
-
[37]
Rate-of-strain vectorization The rate-of-strain tensorE ∞ 0 is symmetric and traceless. Symmetry reduces its nine components to six independent entries, and the tracelessness condition tr(E ∞ 0 ) = 0 removes one further degree of freedom, leaving five independent components. We parameterize them as the vector E∞ vect = [E11, E 12, E 13, E 22, E 23],(B6) f...
-
[38]
A. W. Visser, Hydromechanical signals in the plankton, Mar. Ecol. Prog. Ser.222, 1 (2001)
work page 2001
-
[39]
J. D. Wheeler, E. Secchi, R. Rusconi, and R. Stocker, Not just going with the flow: the effects of fluid flow on bacteria and plankton, Annu. Rev. Cell Dev. Biol.35, 213 (2019)
work page 2019
-
[40]
E. Lauga and T. R. Powers, The hydrodynamics of swimming microorganisms, Rep. Prog. Phys.72, 096601 (2009)
work page 2009
-
[41]
Lauga, Bacterial hydrodynamics, Annu
E. Lauga, Bacterial hydrodynamics, Annu. Rev. Fluid Mech.48, 105 (2016)
work page 2016
-
[42]
Lauga,The fluid dynamics of cell motility, Vol
E. Lauga,The fluid dynamics of cell motility, Vol. 62 (Cambridge University Press, 2020)
work page 2020
-
[43]
J. S. Guasto, R. Rusconi, and R. Stocker, Fluid mechanics of planktonic microorganisms, Annu. Rev. Fluid Mech.44, 373 (2012)
work page 2012
-
[44]
Barth` es-Biesel, Motion and deformation of elastic capsules and vesicles in flow, Annu
D. Barth` es-Biesel, Motion and deformation of elastic capsules and vesicles in flow, Annu. Rev. Fluid Mech.48, 25 (2016)
work page 2016
-
[45]
A. Farutin, S. Rafa¨ ı, D. K. Dysthe, A. Duperray, P. Peyla, and C. Misbah, Amoeboid swimming: A generic self-propulsion of cells in fluids by means of membrane deformations, Phys. Rev. Lett.111, 228102 (2013)
work page 2013
-
[46]
T. J. Smayda, Some experiments on the sinking characteristics of two freshwater diatoms, Limnol. Oceanogr.19, 628 (1974)
work page 1974
-
[47]
S. W. Wiseman and C. S. Reynolds, Sinking rate and electrophoretic mobility of the freshwater diatom asterionella formosa: an experimental investigation, Br. Phycol. J.16, 357 (1981)
work page 1981
-
[48]
J. Padis´ ak,´E. Sor´ oczki-Pint´ er, and Z. Rezner, Sinking properties of some phytoplankton shapes and the relation of form resistance to morphological diversity of plankton—an experimental study, inAquatic Biodiversity: A Celebratory Volume in Honour of Henri J. Dumont(Springer, 2003) pp. 243–257
work page 2003
-
[49]
C. H. Wiggins, D. Riveline, A. Ott, and R. E. Goldstein, Trapping and wiggling: elastohydrodynamics of driven microfil- aments, Biophys. J.74, 1043 (1998)
work page 1998
-
[50]
C. Brouzet, G. Verhille, and P. Le Gal, Flexible fiber in a turbulent flow: A macroscopic polymer, Phys. Rev. Lett.112, 074501 (2014)
work page 2014
-
[51]
O. Du Roure, A. Lindner, E. N. Nazockdast, and M. J. Shelley, Dynamics of flexible fibers in viscous flows and fluids, Annu. Rev. Fluid Mech.51, 539 (2019)
work page 2019
-
[52]
P. J. ˙Zuk, A. M. S lowicka, M. L. Ekiel-Je˙ zewska, and H. A. Stone, Universal features of the shape of elastic fibres in shear flow, J. Fluid Mech.914, A31 (2021)
work page 2021
-
[53]
Sitti, Physical intelligence as a new paradigm, Extreme Mech
M. Sitti, Physical intelligence as a new paradigm, Extreme Mech. Lett.46, 101340 (2021)
work page 2021
-
[54]
O. Yasa, Y. Toshimitsu, M. Y. Michelis, L. S. Jones, M. Filippi, T. Buchner, and R. K. Katzschmann, An overview of soft robotics, Annu. Rev. Control Robot. Auton. Syst.6, 1 (2023)
work page 2023
-
[55]
A. C. Tsang, E. Demir, Y. Ding, and O. S. Pak, Roads to smart artificial microswimmers, Adv. Intell. Syst.2, 1900137 (2020)
work page 2020
-
[56]
A. Elnaggar, S. Kang, M. Tian, B. Han, and M. Keshavarz, State of the art in actuation of micro/nanorobots for biomedical applications, Small Sci.4, 2300211 (2024)
work page 2024
-
[57]
S. R. Dabbagh, M. R. Sarabi, M. T. Birtek, S. Seyfi, M. Sitti, and S. Tasoglu, 3d-printed microrobots from design to translation, Nat. Commun.13, 5875 (2022)
work page 2022
-
[58]
C. Mo, G. Li, and X. Bian, Challenges and attempts to make intelligent microswimmers, Front. Phys.11, 1279883 (2023)
work page 2023
- [59]
-
[60]
B. R. Sutherland, M. DiBenedetto, A. Kaminski, and T. Van Den Bremer, Fluid dynamics challenges in predicting plastic pollution transport in the ocean: A perspective, Phys. Rev. Fluids8, 070701 (2023)
work page 2023
-
[61]
Brenner, The stokes resistance of an arbitrary particle, Chem
H. Brenner, The stokes resistance of an arbitrary particle, Chem. Eng. Sci.18, 1 (1963)
work page 1963
-
[62]
J. Happel and H. Brenner,Low Reynolds number hydrodynamics: with special applications to particulate media, first paperback edition ed. (Martinus Nijhoff Publishers, The Hague, 1983)
work page 1983
- [63]
-
[64]
S. Kim, C. Laschi, and B. Trimmer, Soft robotics: a bioinspired evolution in robotics, Trends Biotechnol.31, 287 (2013)
work page 2013
-
[65]
R. Pfeifer and J. Bongard,How the body shapes the way we think: a new view of intelligence(MIT press, 2006)
work page 2006
-
[66]
R. Pfeifer, F. Iida, and M. Lungarella, Cognition from the bottom up: on biological inspiration, body morphology, and soft materials, Trends Cogn. Sci.18, 404 (2014)
work page 2014
- [67]
- [68]
-
[69]
K. Nakajima, H. Hauser, T. Li, and R. Pfeifer, Information processing via physical soft body, Sci. Rep.5, 10487 (2015)
work page 2015
- [70]
-
[71]
C. Pozrikidis,Boundary integral and singularity methods for linearized viscous flow, Cambridge Texts in Applied Mathe- matics (Cambridge University Press, 1992)
work page 1992
-
[72]
F. Balboa Usabiaga, B. Kallemov, B. Delmotte, A. Bhalla, B. Griffith, and A. Donev, Hydrodynamics of suspensions of 21 passive and active rigid particles: a rigid multiblob approach, Commun. Appl. Math. Comput. Sci.11, 217 (2017)
work page 2017
-
[73]
F. Balboa Usabiaga and B. Delmotte, A numerical method for suspensions of articulated bodies in viscous flows, J. Comput. Phys.464, 111365 (2022)
work page 2022
- [74]
-
[75]
A.-K. Tornberg and M. J. Shelley, Simulating the dynamics and interactions of flexible fibers in stokes flows, J. Comput. Phys.196, 8 (2004)
work page 2004
-
[76]
E. Nazockdast, A. Rahimian, D. Zorin, and M. Shelley, A fast platform for simulating semi-flexible fiber suspensions applied to cell mechanics, J. Comput. Phys.329, 173 (2017)
work page 2017
- [77]
-
[78]
J. Garc´ ıa de la Torre and V. A. Bloomfield, Hydrodynamic properties of complex, rigid, biological macromolecules: theory and applications, Q. Rev. Biophys.14, 81 (1981)
work page 1981
-
[79]
P. J. Zuk, E. Wajnryb, K. Mizerski, and P. Szymczak, Rotne–Prager–Yamakawa approximation for different-sized particles in application to macromolecular bead models, J. Fluid Mech.741, R5 (2014)
work page 2014
-
[80]
P. J. Zuk, B. Cichocki, and P. Szymczak, Grpy: an accurate bead method for calculation of hydrodynamic properties of rigid biomacromolecules, Biophys. J.115, 782 (2018)
work page 2018
-
[81]
O. Gonzalez, A. Graf, and J. Maddocks, Dynamics of a rigid body in a Stokes fluid, J. Fluid Mech.519, 133 (2004)
work page 2004
-
[82]
T. A. Witten and H. Diamant, A review of shaped colloidal particles in fluids: anisotropy and chirality, Rep. Prog. Phys. 83, 116601 (2020)
work page 2020
- [83]
-
[84]
J. F. Brady and G. Bossis, Stokesian dynamics, Annu. Rev. Fluid Mech.20, 111 (1988)
work page 1988
-
[85]
K. Ichiki, Improvement of the stokesian dynamics method for systems with a finite number of particles, J. Fluid Mech. 452, 231 (2002)
work page 2002
-
[86]
A. M. Fiore and J. W. Swan, Fast stokesian dynamics, J. Fluid Mech.878, 544 (2019)
work page 2019
-
[87]
J. W. Swan and G. Wang, Rapid calculation of hydrodynamic and transport properties in concentrated solutions of colloidal particles and macromolecules, Phys. Fluids28(2016)
work page 2016
-
[88]
J. Rotne and S. Prager, Variational treatment of hydrodynamic interaction in polymers, J. Chem. Phys.50, 4831 (1969)
work page 1969
-
[89]
Yamakawa, Transport properties of polymer chains in dilute solution: hydrodynamic interaction, J
H. Yamakawa, Transport properties of polymer chains in dilute solution: hydrodynamic interaction, J. Chem. Phys.53, 436 (1970)
work page 1970
-
[90]
E. Wajnryb, K. A. Mizerski, P. J. Zuk, and P. Szymczak, Generalization of the rotne–prager–yamakawa mobility and shear disturbance tensors, J. Fluid Mech.731, R3 (2013)
work page 2013
-
[91]
B. Cichocki, P. Szymczak, and P. J. ˙Zuk, Generalized rotne–prager–yamakawa approximation for brownian dynamics in shear flow in bounded, unbounded, and periodic domains, J. Chem. Phys.154(2021)
work page 2021
-
[92]
B. Delmotte, E. E. Keaveny, F. Plourabou´ e, and E. Climent, Large-scale simulation of steady and time-dependent active suspensions with the force-coupling method, J. Comput. Phys.302, 524 (2015)
work page 2015
-
[93]
B. Delmotte, E. Climent, and F. Plourabou´ e, A general formulation of bead models applied to flexible fibers and active filaments at low Reynolds number, J. Comput. Phys.286, 14 (2015)
work page 2015
-
[94]
P. Fuchter and H. Bloomfield-Gadˆ elha, The three-dimensional coarse-graining formulation of interacting elastohydrody- namic filaments and multi-body microhydrodynamics, J. R. Soc. Interface20, 20230021 (2023)
work page 2023
- [95]
-
[96]
A. Solovev and B. M. Friedrich, Lagrangian mechanics of active systems, Eur. Phys. J. E44, 1 (2021)
work page 2021
-
[97]
E. M. Purcell, Life at low reynolds number, inPhysics and our world: reissue of the proceedings of a symposium in honor of Victor F Weisskopf(World Scientific, 2014) pp. 47–67
work page 2014
-
[98]
A. Najafi and R. Golestanian, Simple swimmer at low reynolds number: Three linked spheres, Phys. Rev. E69, 062901 (2004)
work page 2004
-
[99]
Eloy, Soft mobility Python library (2026),https://github.com/C0PEP0D/SoftMobility
C. Eloy, Soft mobility Python library (2026),https://github.com/C0PEP0D/SoftMobility
work page 2026
-
[100]
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman-Milne, and Q. Zhang, JAX: composable transformations of Python+NumPy programs (2018)
work page 2018
-
[101]
DeepMindet al., The DeepMind JAX Ecosystem (2020)
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.