Triadic Dynamics Aware Diffusion Posterior Sampling for Inverse Problems: Optimizing Guidance and Stochasticity Schedules
Pith reviewed 2026-06-29 18:39 UTC · model grok-4.3
The pith
Scheduling data consistency, classifier-free guidance, and stochasticity together in a triadic pattern improves diffusion posterior sampling for imaging inverse problems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
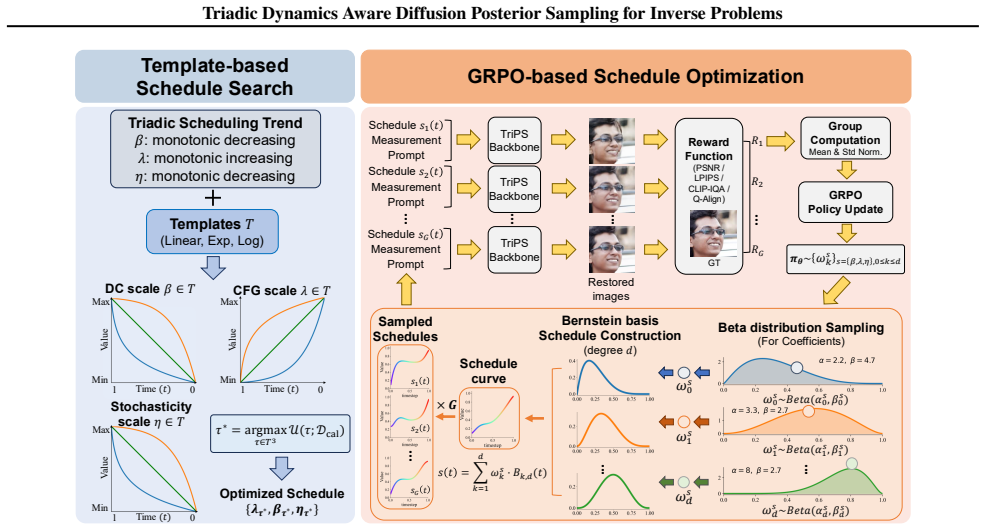
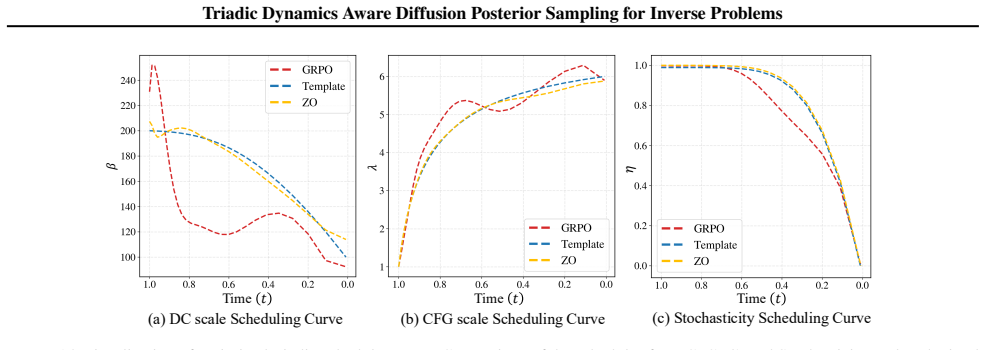
TriPS reformulates posterior sampling as a time-varying control problem and optimizes the three-component schedules to follow a triadic trend of decreasing data consistency and stochasticity scales alongside increasing classifier-free guidance scale, using either template-based search or reinforcement learning to locate the curves.
What carries the argument
Triadic trend: the time-dependent pattern in which data consistency and stochasticity scales fall while classifier-free guidance scale rises during the diffusion sampling trajectory.
If this is right
- Higher data fidelity in the reconstructed images compared with fixed-schedule baselines.
- Improved perceptual realism in the final outputs.
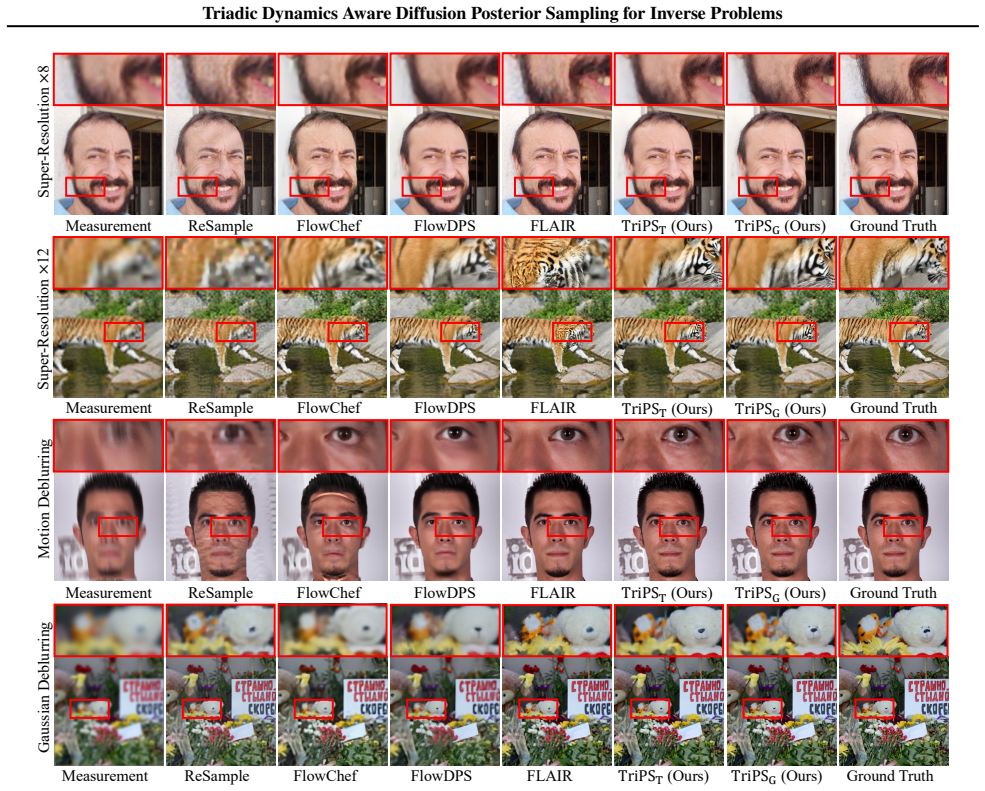
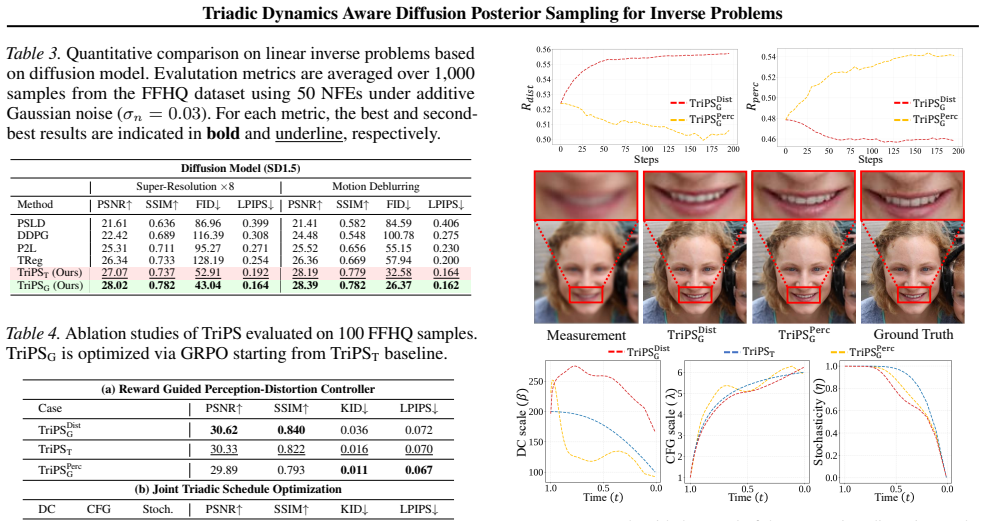
- Outperformance of state-of-the-art methods on both fidelity and realism metrics.
- Two practical ways to obtain the schedules: template search over functional priors and GRPO reinforcement learning.
Where Pith is reading between the lines
- The same control-problem view of sampling could be applied to diffusion tasks outside imaging inverse problems.
- Similar dynamic balancing of guidance terms may appear in other iterative generative algorithms.
- Validation on a broader set of inverse problems would test whether the triadic pattern remains dominant.
Load-bearing premise
The triadic trend derived from the conflict analysis is the optimal dynamic schedule that generalizes across inverse problems.
What would settle it
An experiment on standard imaging inverse-problem benchmarks in which any schedule that increases data consistency scale together with classifier-free guidance scale produces measurably higher fidelity and realism than the triadic schedule.
Figures






read the original abstract
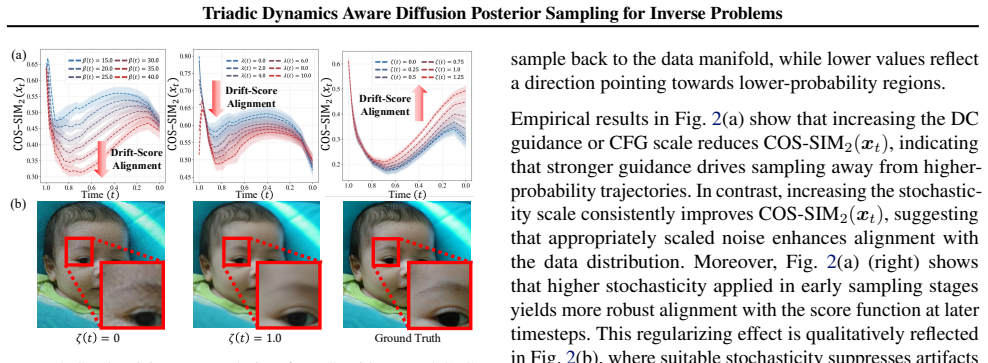
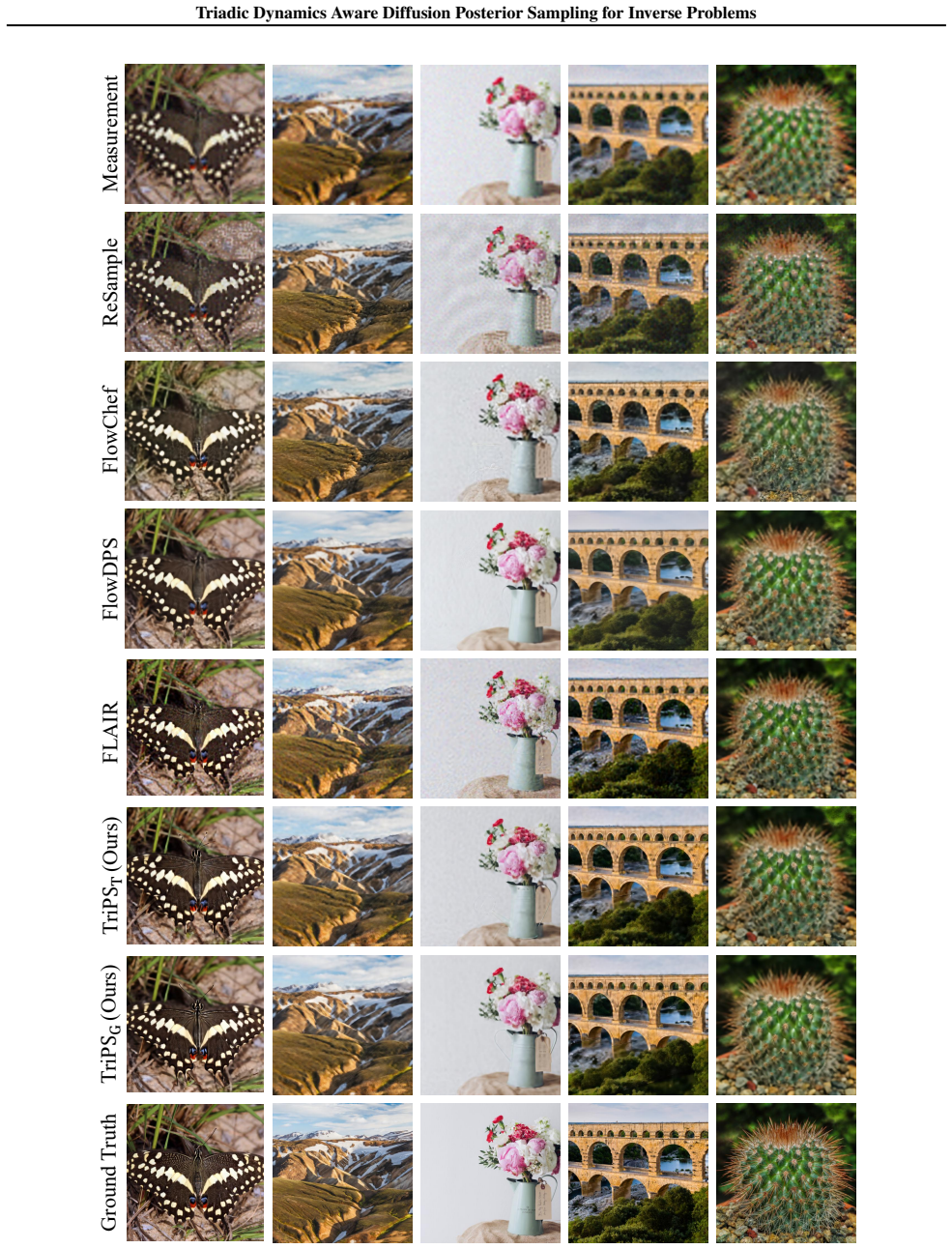
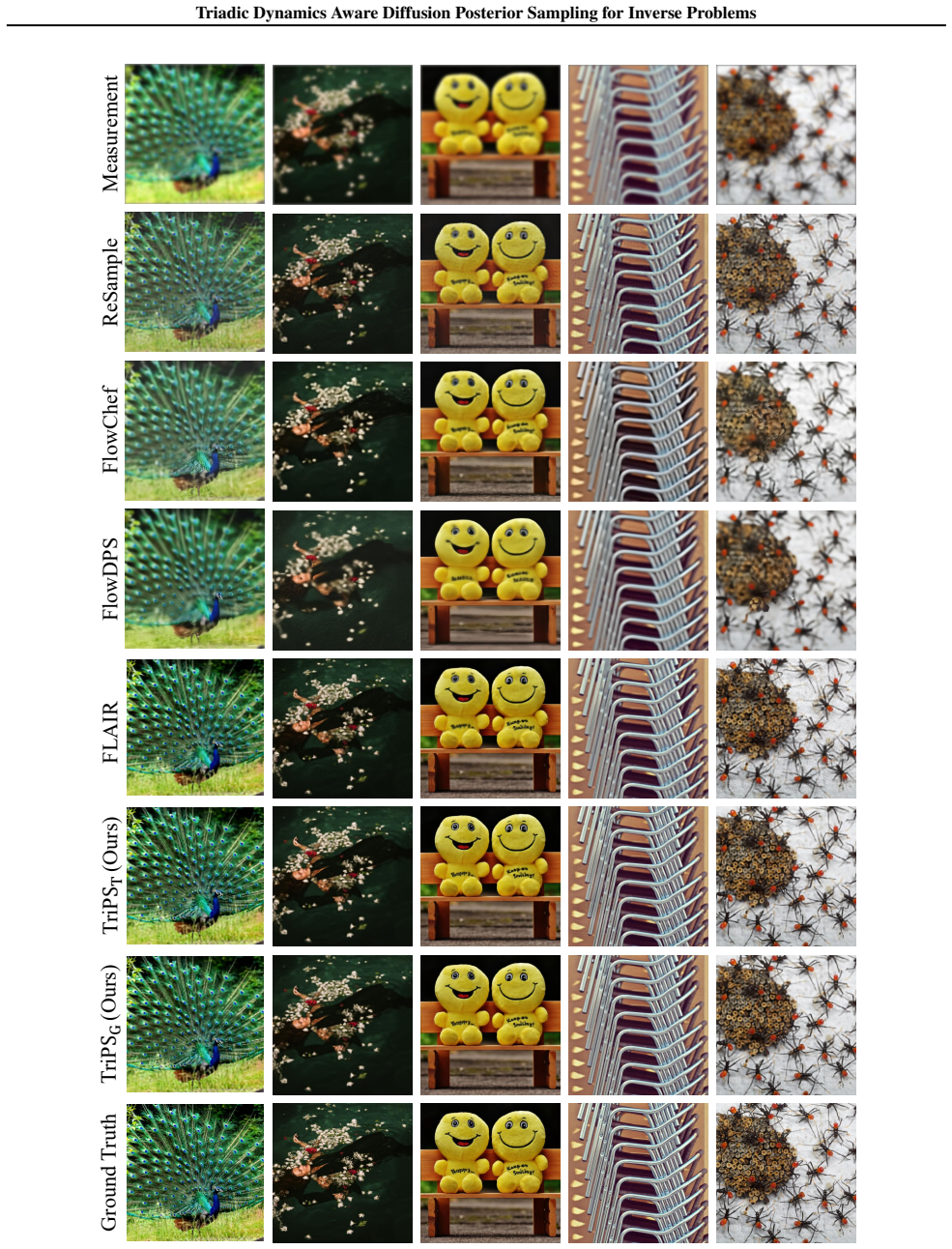
Generative posterior sampling using diffusion models has emerged as a dominant paradigm for solving inverse problems in imaging, which usually consists of three main components: data consistency (DC) guidance, classifier-free guidance (CFG) and stochasticity. While prior arts have focused on how to develop each or all components, less attention has given to how to schedule them, leading to heuristically fixed or partially adjusted suboptimal schedules. In this work, we argue that the interactions among all three components in terms of scheduling are crucial for significantly improved performance in solving inverse problems in imaging. Our analysis shows that aggressive CFG early in sampling conflict with DC guidance, while stochasticity brings the trajectory back to higher-probability regions. Based on these findings, we propose Triadic Dynamics Aware Posterior Sampling (TriPS), which reformulates posterior sampling as a time-varying control problem and optimizes schedules following a triadic trend of decreasing DC and stochasticity scales alongside increasing CFG scale. TriPS achieves this through two strategies: template-based search over functional priors for reliable baseline schedules, and Group Relative Policy Optimization (GRPO)-based reinforcement learning for more flexible temporal curves. Experiments demonstrate TriPS outperforms state-of-the-art baselines in data fidelity and perceptual realism.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that the scheduling interactions among data consistency (DC) guidance, classifier-free guidance (CFG), and stochasticity are crucial for diffusion posterior sampling in inverse imaging problems. Analysis indicates aggressive early CFG conflicts with DC while stochasticity returns trajectories to higher-probability regions. TriPS reformulates sampling as a time-varying control problem and optimizes schedules to follow a triadic trend (decreasing DC/stochasticity scales with increasing CFG scale) via template-based search over functional priors and Group Relative Policy Optimization (GRPO). Experiments are stated to show outperformance versus state-of-the-art baselines in data fidelity and perceptual realism.
Significance. If the triadic dynamic is shown to be optimal and generalizes, the work would advance diffusion-based inverse problem solvers by replacing heuristic or partial schedules with a principled, analysis-driven optimization of all three components. The dual strategy of reliable template search plus flexible RL-based curves is a methodological strength worth crediting.
major comments (2)
- [Abstract] Abstract: the central claim of outperformance rests on the triadic trend being the optimal dynamic, yet the abstract supplies no quantitative results, dataset details, ablation studies against non-triadic schedules, or derivation of the control formulation, leaving the premise without visible supporting evidence.
- [Analysis section] Analysis of component interactions: the optimality of the triadic trend (decreasing DC and stochasticity with rising CFG) is asserted from the stated conflict between early aggressive CFG and DC guidance plus the role of stochasticity, but no ablations are described comparing this specific form to alternative temporal curves; this is load-bearing for attributing gains to the triadic choice rather than the optimization procedure itself.
minor comments (1)
- [Method] The reformulation of posterior sampling as a time-varying control problem would benefit from explicit equations defining the schedule parameterization in the main text for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments identify opportunities to strengthen the presentation of evidence for the triadic trend and its optimality. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of outperformance rests on the triadic trend being the optimal dynamic, yet the abstract supplies no quantitative results, dataset details, ablation studies against non-triadic schedules, or derivation of the control formulation, leaving the premise without visible supporting evidence.
Authors: We agree the abstract is concise and omits quantitative results and ablations due to length limits. The body of the manuscript contains these details (experiments on standard inverse-problem benchmarks, control-problem derivation in Section 3, and comparisons). We will revise the abstract to incorporate key quantitative gains and a brief reference to the time-varying control formulation while preserving readability. revision: yes
-
Referee: [Analysis section] Analysis of component interactions: the optimality of the triadic trend (decreasing DC and stochasticity with rising CFG) is asserted from the stated conflict between early aggressive CFG and DC guidance plus the role of stochasticity, but no ablations are described comparing this specific form to alternative temporal curves; this is load-bearing for attributing gains to the triadic choice rather than the optimization procedure itself.
Authors: Section 4 derives the triadic trend from the identified component conflicts and the stabilizing role of stochasticity. The subsequent optimization (template search plus GRPO) discovers schedules consistent with this trend and demonstrates gains over baselines. We acknowledge that explicit ablations isolating the triadic shape against other temporal forms would more directly attribute improvements. We will add these ablations in the revision. revision: yes
Circularity Check
No significant circularity; triadic trend derived from stated analysis rather than self-definition or fitted inputs.
full rationale
The abstract and provided context present an independent analysis of CFG-DC-stochasticity interactions leading to the triadic scheduling premise, followed by template search and GRPO optimization as separate procedures. No equations or claims reduce reported performance gains to a parameter fitted from the same experiments by construction. No self-citation load-bearing steps are identifiable from the given text. This matches the default expectation of non-circularity for a method paper whose central claim rests on empirical optimization rather than renaming or self-referential derivation. Minor score accounts for possible unquoted analysis details but finds no load-bearing reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Diffusion models can be used for posterior sampling in inverse problems via guidance terms
Reference graph
Works this paper leans on
-
[1]
and Timofte, R
Agustsson, E. and Timofte, R. Ntire 2017 challenge on sin- gle image super-resolution: Dataset and study. InCVPRW, pp. 126–135,
2017
-
[2]
9 Triadic Dynamics Aware Diffusion Posterior Sampling for Inverse Problems Erbach, J., Narnhofer, D., Dombos, A., Schiele, B., Lenssen, J. E., and Schindler, K. Solving inverse problems with flair.arXiv preprint arXiv:2506.02680,
-
[3]
Flow-GRPO: Training Flow Matching Models via Online RL
Liu, J., Liu, G., Liang, J., Li, Y ., Liu, J., Wang, X., Wan, P., Zhang, D., and Ouyang, W. Flow-grpo: Training flow matching models via online rl.arXiv preprint arXiv:2505.05470,
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
FlowLPS: Langevin-Proximal Sampling for Flow-based Inverse Problem Solvers
Park, J. and Ye, J. C. Flowlps: Langevin-proximal sampling for flow-based inverse problem solvers.arXiv preprint arXiv:2512.07150,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
Pourya, M., Rawas, B. E., and Unser, M. Flower: A flow- matching solver for inverse problems.arXiv preprint arXiv:2509.26287,
-
[6]
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models
Shao, Z., Wang, P., Zhu, Q., Xu, R., Song, J., Bi, X., Zhang, H., Zhang, M., Li, Y ., Wu, Y ., et al. Deepseekmath: Push- ing the limits of mathematical reasoning in open language models.arXiv preprint arXiv:2402.03300,
work page internal anchor Pith review Pith/arXiv arXiv
-
[7]
Q-Align: Teaching LMMs for Visual Scoring via Discrete Text-Defined Levels
Wu, H., Zhang, Z., Zhang, W., Chen, C., Liao, L., Li, C., Gao, Y ., Wang, A., Zhang, E., Sun, W., et al. Q-align: Teaching lmms for visual scoring via discrete text-defined levels.arXiv preprint arXiv:2312.17090,
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
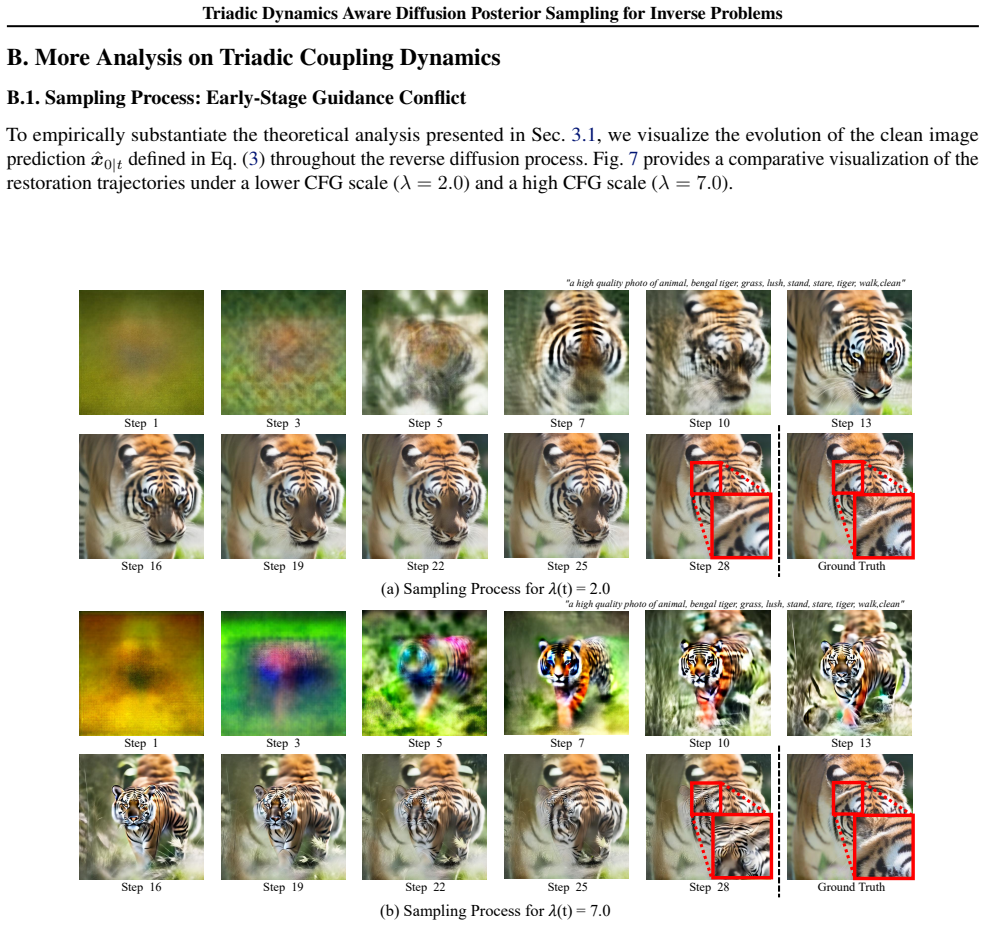
a high quality photo of animal, bengal tiger, grass, lush, stand, stare, tiger, walk,clean
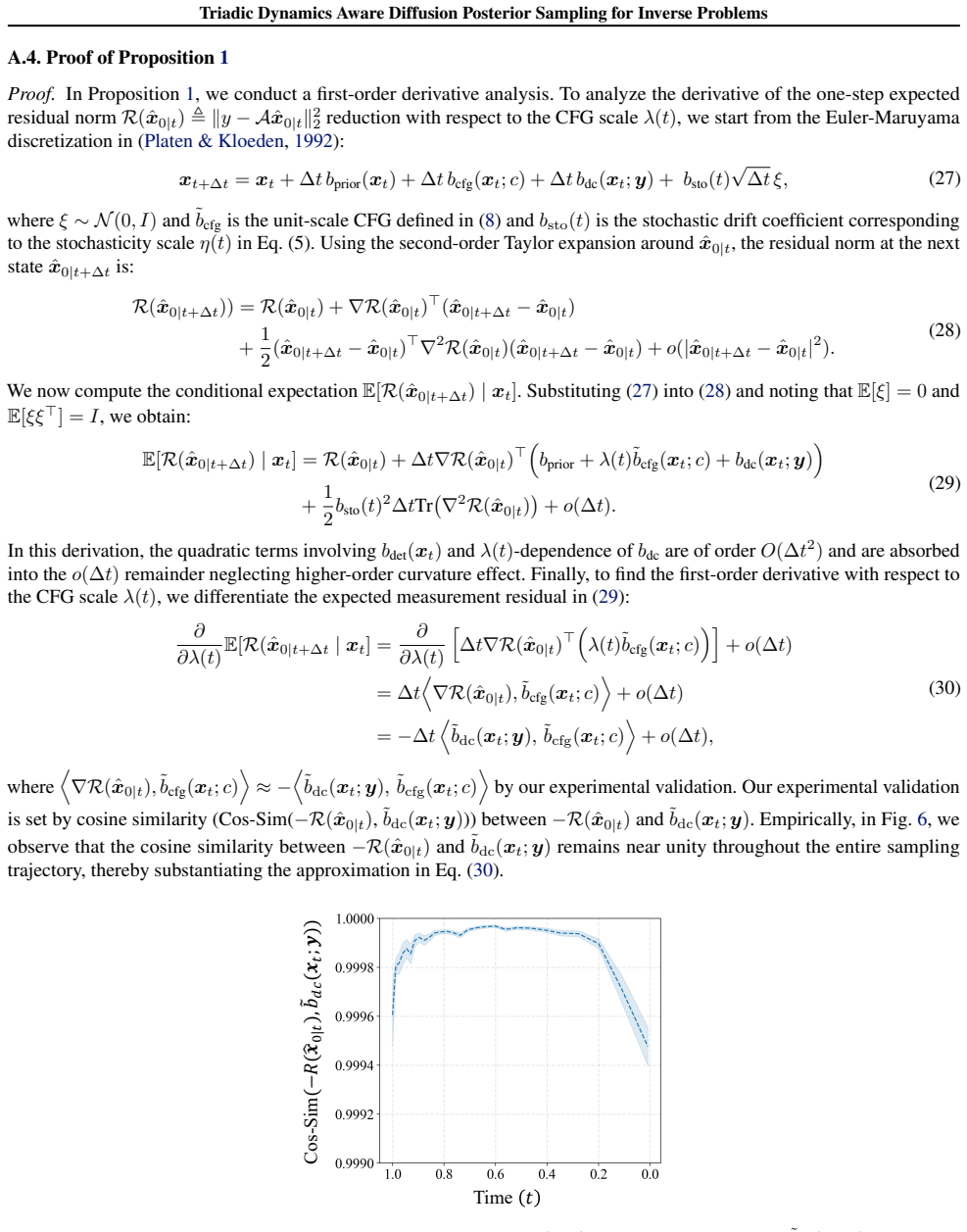
=− 1 t2 xt −(1−t)x 0 .(23) Using∇ xt logp t(xt) =E[∇ xt logp t(xt |x 0)|x t]gives ∇xt logp t(xt) =− 1 t2 xt −(1−t)E[x 0 |x t] .(24) Substituting (19) yields: ∇xt logp t(xt) =− xt t − 1−t t vt(xt)≈ − xt t − 1−t t vθ(xt;∅).(25) Equivalently, solving (25) forv t gives vt(xt) =− xt 1−t − t 1−t ∇xt logp t(xt),(26) which matches the form used in (Liu et al., 20...
2025
-
[9]
CFG-induced velocity field 4: ˆz0|t ←z t −σ tvt(zt) 5: ˆz1|t ←z t + (1−σ t)vt(zt) 6: ˜z0|t(y)← ˆz0|t −β(t)∇ ˆz0|t L(AD( ˆz0|t),y) Eq
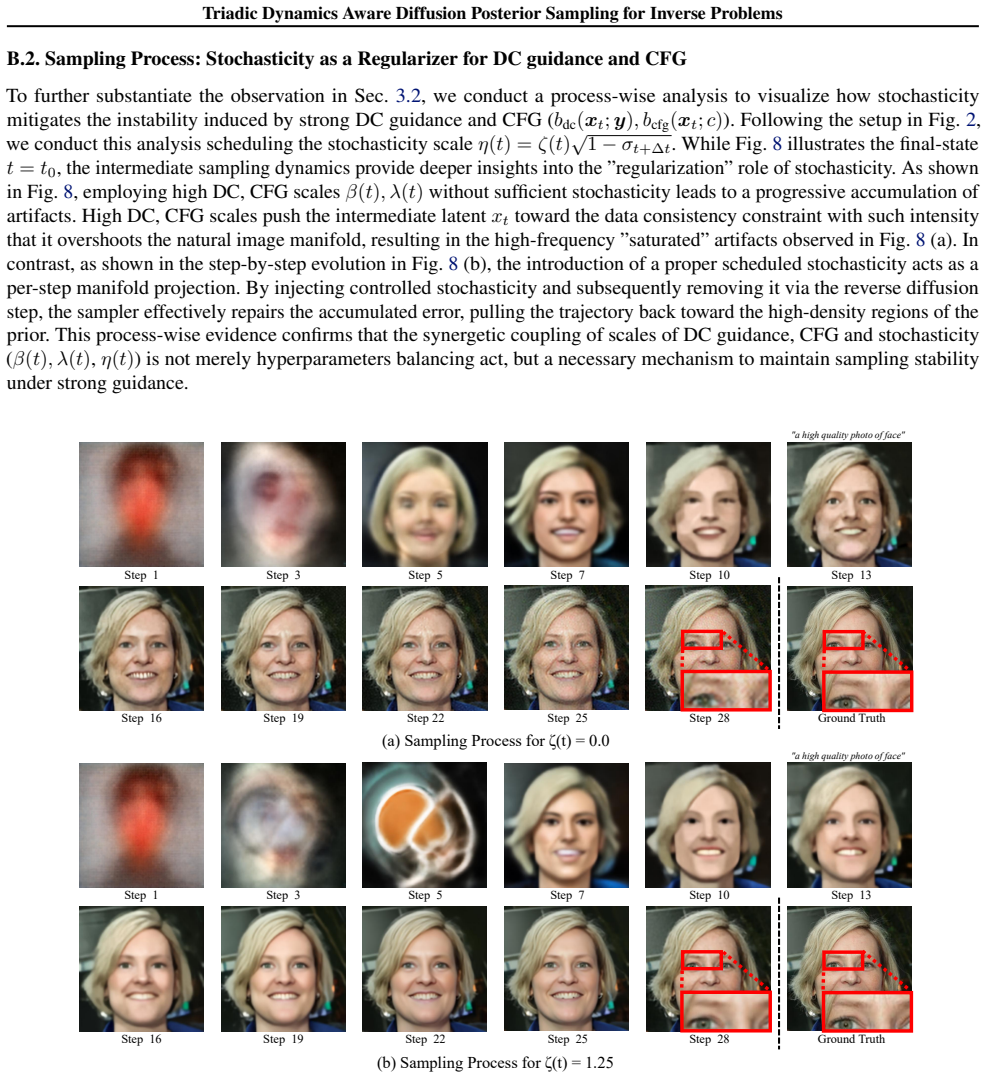
We 17 Triadic Dynamics Aware Diffusion Posterior Sampling for Inverse Problems Algorithm 1Inference of TriPS (Flow Matching) Require: Measurement y, linear operator A (and adjoint A⊤), pre-trained flow model vθ, V AE encoder/decoder(E,D) , text embeddings(c ∅, c), noise schedule{σ t}t∈[0,1], Schedules of DC, CFG, Stochasticity scaleβ(t), λ(t), η(t) 1:z 1 ...
2023
-
[10]
curves (linearly increasing to decreasing / linearly decreasing to increasing) for inpainting task. This divergence stems from the spatial nature of the inpainting task: as the sampling process approaches the low-noise regime, maintaining or even intensifying the DC guidance ensures a seamless transition between the generated content and the ground-truth ...
2025
-
[11]
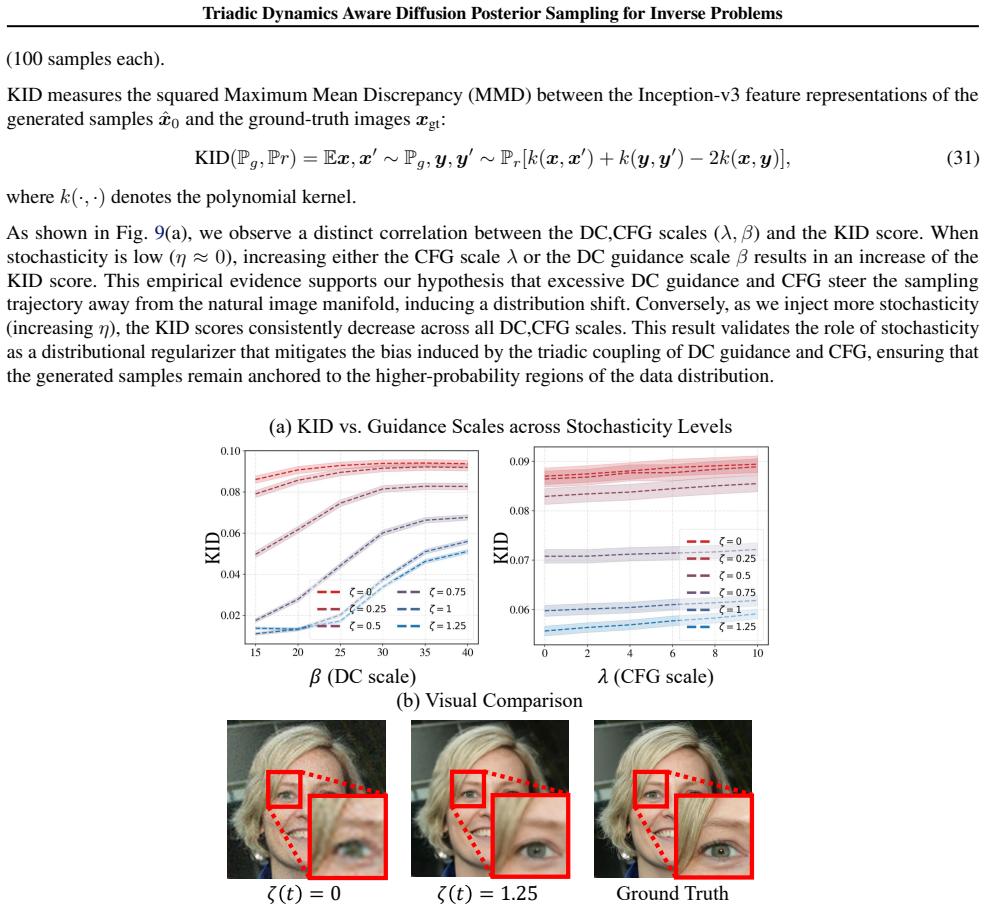
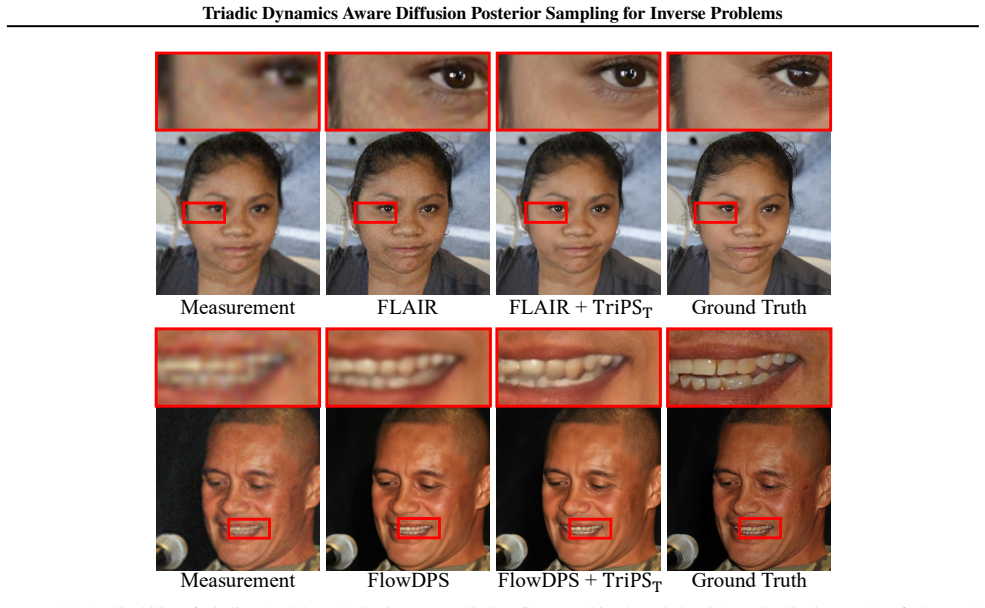
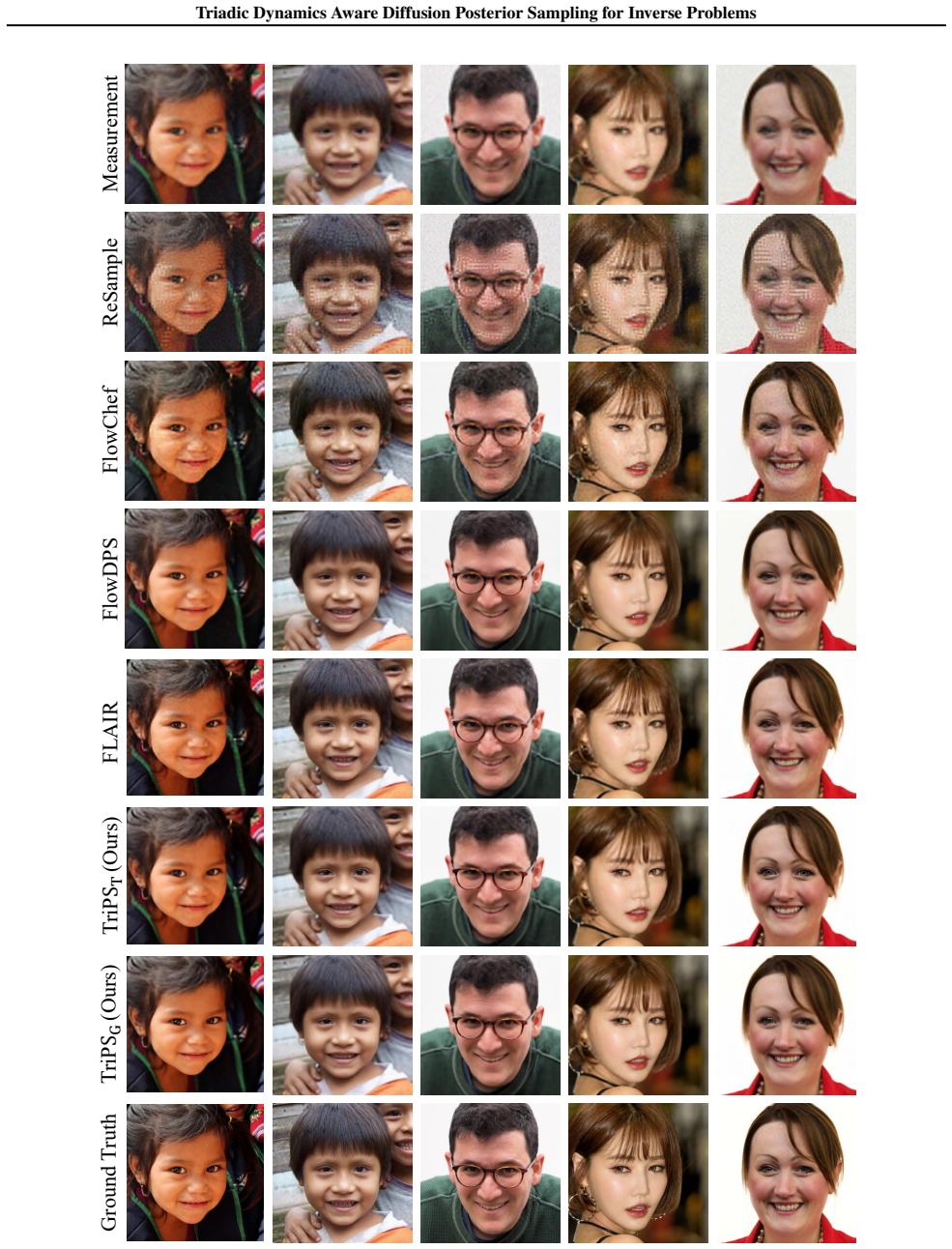
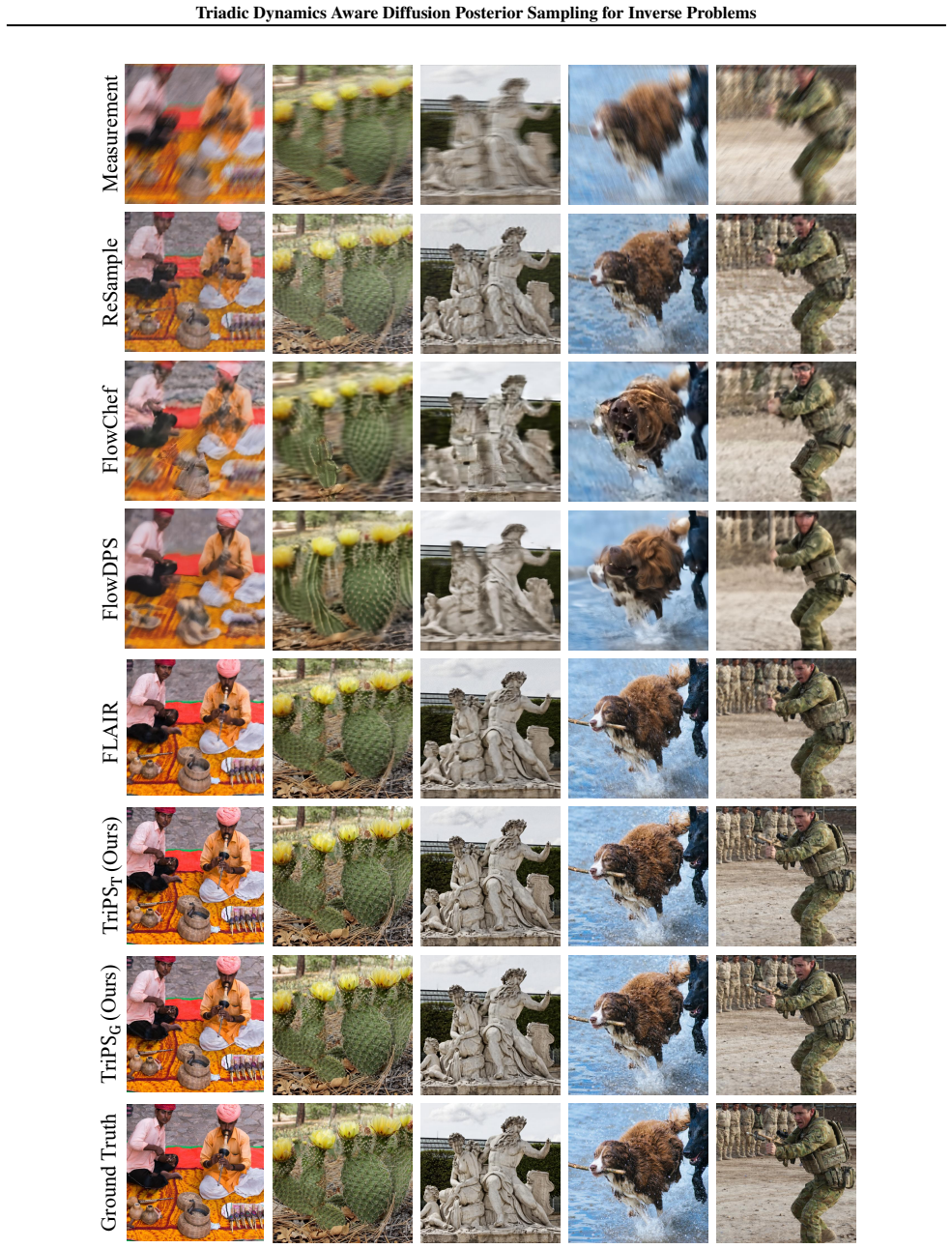
baselines against their counterparts integrated with our proposed triadic schedule optimization framework. Method PSNR↑SSIM↑KID↓LPIPS↓ FlowDPS 28.090.779 0.012 0.105 FlowDPS + TriPST 27.97 0.782 0.009 0.099 FLAIR 29.180.778 0.041 0.120 FLAIR + TriPST 29.03 0.784 0.008 0.099 maintaining competitive performance in distortion metrics (PSNR, SSIM) relative to...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.