Bridging the Sampling Distribution Shift in Radio Map Estimation: A Trajectory-Aware Paradigm
Pith reviewed 2026-06-29 12:48 UTC · model grok-4.3
The pith
Training on random samples causes radio map models to fail on real UAV trajectory data, but stochastic trajectory sampling restores accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
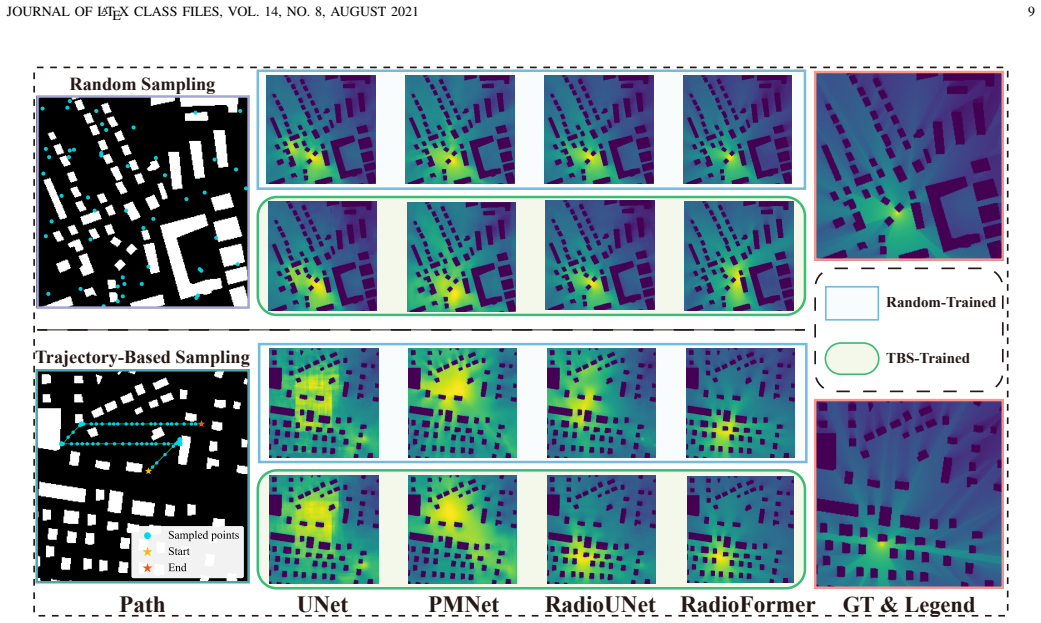
Models trained with random sampling suffer significant performance degradation under trajectory-based observations, with RMSE increasing from 0.0391 to 0.2632 on SpectrumNet. Conversely, our proposed ST-TBS method effectively reduces the RMSE to 0.0571. From a statistical perspective, trajectory-based sampling reduces spatial diversity and increases information redundancy compared to random sampling.
What carries the argument
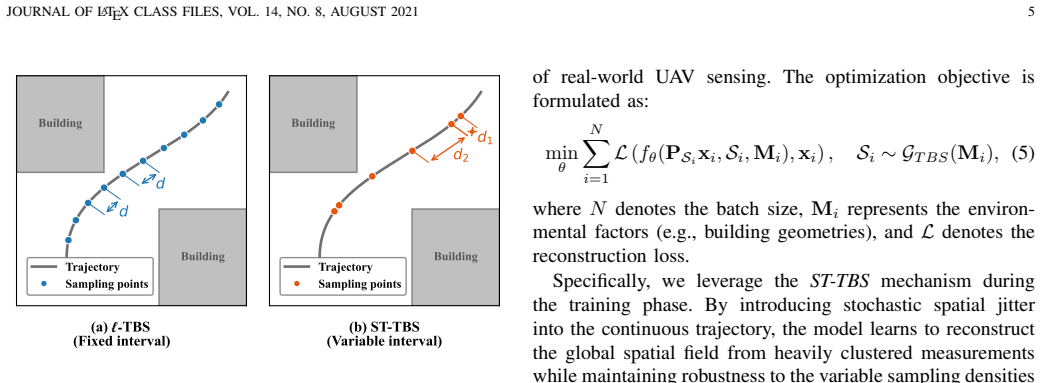
Stochastic-Triggered Trajectory-Based Sampling (ST-TBS), a training paradigm that preserves trajectory continuity while introducing sampling variability to align training and deployment distributions.
If this is right
- Models will generalize reliably to UAV-assisted tasks such as coverage prediction when training uses trajectory-structured samples.
- Aligning training and deployment sampling distributions is required for reliable radio map estimation.
- The reduction in spatial diversity from trajectory sampling is the main reason random-trained models degrade on real measurements.
Where Pith is reading between the lines
- Similar distribution shifts may appear in other spatial sensing tasks that rely on path-constrained collection.
- ST-TBS could be adapted to improve generalization in related problems like temperature field mapping from mobile sensors.
Load-bearing premise
That aligning the sampling pattern between training and real measurements will fix the performance drop and that this fix will hold outside the two tested datasets.
What would settle it
A new experiment on a third radio map dataset where ST-TBS training still leaves RMSE near 0.26 on trajectory test data.
Figures





read the original abstract
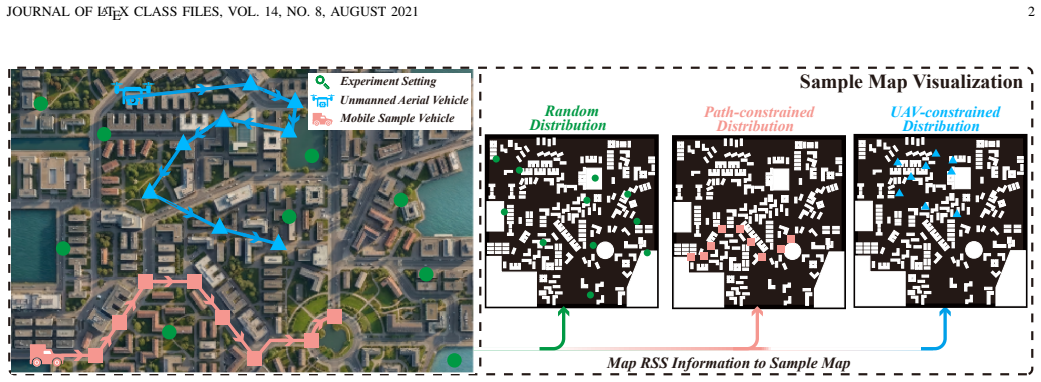
Learning-based radio map estimation (RME) plays a critical role in UAV-assisted wireless sensing, enabling tasks such as coverage prediction and network optimization. Most current methods assume an independently and identically distributed (i.i.d.) training and testing setting based on random sampling. However, practical UAV measurements are collected sequentially along feasible trajectories, resulting in highly structured and spatially correlated patterns. This mismatch introduces a sampling distribution shift that increases the intrinsic difficulty of spatial field recovery and compromises the generalization of models trained under i.i.d. assumptions. To mitigate this issue, we propose a trajectory-aware training paradigm based on Stochastic-Triggered Trajectory-Based Sampling (ST-TBS), which preserves trajectory continuity while introducing sampling variability. Moreover, from a statistical perspective, we show that trajectory-based sampling reduces spatial diversity and increases information redundancy compared to random sampling. Extensive experiments on the RadioMapSeer and SpectrumNet datasets demonstrate that models trained with random sampling suffer significant performance degradation under trajectory-based observations, with RMSE increasing from 0.0391 to 0.2632 on SpectrumNet. Conversely, our proposed ST-TBS method effectively reduces the RMSE to 0.0571. These results highlight the necessity of aligning training and deployment sampling distributions for reliable RME.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper identifies a sampling distribution shift in learning-based radio map estimation between i.i.d. random sampling in training and sequential trajectory-based sampling in UAV deployments. It proposes Stochastic-Triggered Trajectory-Based Sampling (ST-TBS) to preserve continuity while adding variability, and claims from a statistical perspective that trajectory sampling reduces spatial diversity and increases redundancy. Experiments on RadioMapSeer and SpectrumNet report RMSE rising from 0.0391 to 0.2632 under trajectory observations on SpectrumNet, reduced to 0.0571 with ST-TBS.
Significance. If the results hold and the proposed mechanism is validated, the work highlights a practically relevant distribution mismatch that affects generalization in UAV-assisted wireless sensing. The reported RMSE reductions are quantitatively large and could inform more robust training paradigms. No machine-checked proofs or parameter-free derivations are present; the contribution rests on empirical comparisons.
major comments (2)
- [Abstract] Abstract: The assertion that trajectory-based sampling reduces spatial diversity (and that this is the primary driver of the RMSE increase from 0.0391 to 0.2632) is made from a 'statistical perspective' but no concrete metric (e.g., coverage entropy, pairwise distance distribution), derivation, or ablation controlling for diversity while holding path continuity fixed is referenced, leaving open whether other factors such as temporal autocorrelation explain the gap.
- [Experiments] Experiments section: The key RMSE figures (0.0391, 0.2632, 0.0571) are presented without error bars, number of runs, or statistical tests, which is load-bearing for the claim that ST-TBS 'effectively reduces' the error relative to the trajectory baseline.
minor comments (1)
- [Abstract] Abstract: The phrase 'extensive experiments' is used but the abstract itself supplies no implementation details, baseline descriptions, or dataset statistics.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of rigor that we will address in the revision. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that trajectory-based sampling reduces spatial diversity (and that this is the primary driver of the RMSE increase from 0.0391 to 0.2632) is made from a 'statistical perspective' but no concrete metric (e.g., coverage entropy, pairwise distance distribution), derivation, or ablation controlling for diversity while holding path continuity fixed is referenced, leaving open whether other factors such as temporal autocorrelation explain the gap.
Authors: We agree that the current manuscript presents the statistical argument without explicit quantitative support or controlled ablations. The full text argues that trajectory sampling increases redundancy relative to i.i.d. sampling, but does not supply concrete metrics or isolate diversity from temporal effects. In the revised version we will introduce coverage entropy and pairwise distance statistics, plus an ablation that holds path continuity fixed while varying diversity, to clarify the primary driver of the observed RMSE gap. revision: yes
-
Referee: [Experiments] Experiments section: The key RMSE figures (0.0391, 0.2632, 0.0571) are presented without error bars, number of runs, or statistical tests, which is load-bearing for the claim that ST-TBS 'effectively reduces' the error relative to the trajectory baseline.
Authors: We concur that the reported RMSE values lack the statistical detail needed to substantiate the performance claims. The manuscript presents single-run point estimates. In the revision we will repeat all experiments across multiple random seeds, report means and standard deviations, and include appropriate statistical tests (e.g., paired t-tests) to confirm that the reduction from 0.2632 to 0.0571 is significant. revision: yes
Circularity Check
No circularity; empirical claims rest on dataset experiments without definitional reduction
full rationale
The paper advances an empirical argument that trajectory-based sampling degrades RME performance relative to i.i.d. random sampling and that the proposed ST-TBS strategy mitigates the gap, supported by RMSE numbers on RadioMapSeer and SpectrumNet. No equations, derivations, or fitted parameters are presented as predictions; the statistical claim about reduced spatial diversity is asserted from direct comparison of sampling patterns rather than any self-referential construction. No self-citation chains, uniqueness theorems, or ansatzes are invoked to carry the central result. The work therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
3d radio map recon- struction based on generative adversarial networks under constrained air- craft trajectories,
T. Hu, Y . Huang, J. Chen, Q. Wu, and Z. Gong, “3d radio map recon- struction based on generative adversarial networks under constrained air- craft trajectories,”IEEE Transactions on Vehicular Technology, vol. 72, no. 6, pp. 8250–8255, 2023
2023
-
[2]
Deep-learning-based radio map reconstruction for v2x communications,
S. Roger, M. Brambilla, B. C. Tedeschini, C. Botella-Mascarell, M. Co- bos, and M. Nicoli, “Deep-learning-based radio map reconstruction for v2x communications,”IEEE Transactions on Vehicular Technology, vol. 73, no. 3, pp. 3863–3871, 2024
2024
-
[3]
Space- based multi-dimensional spectrum situation awareness: A robust stream- ing tensor subspace tracking approach,
Y . Ma, R. Xiao, X. Zhang, S. Zhang, Y . Gao, and W. Zhang, “Space- based multi-dimensional spectrum situation awareness: A robust stream- ing tensor subspace tracking approach,”IEEE Transactions on Mobile Computing, vol. 25, no. 4, pp. 4602–4617, 2026
2026
-
[4]
Spectrum situation awareness based on time-series depth networks for lte-r communica- tion system,
X. Cai, C. Wu, J. Sheng, Y . Wang, and B. Ai, “Spectrum situation awareness based on time-series depth networks for lte-r communica- tion system,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 8629–8640, 2022
2022
-
[5]
Radiounet: Fast radio map estimation with convolutional neural networks,
R. Levie, . Yapar, G. Kutyniok, and G. Caire, “Radiounet: Fast radio map estimation with convolutional neural networks,”IEEE Transactions on Wireless Communications, vol. 20, no. 6, pp. 4001–4015, 2021
2021
-
[6]
Radiodun: A physics-inspired deep unfolding network for radio map estimation,
T. Chen, Z. Zhou, Z. Fang, W. Zou, K. Liu, K. Chen, Y . Zhang, and Y . Wang, “Radiodun: A physics-inspired deep unfolding network for radio map estimation,” 2025
2025
-
[7]
Pmnet: Robust pathloss map prediction via supervised learning,
J.-H. Lee, O. G. Serbetci, D. P. Selvam, and A. F. Molisch, “Pmnet: Robust pathloss map prediction via supervised learning,” inGLOBE- COM 2023 - 2023 IEEE Global Communications Conference, 2023, pp. 4601–4606
2023
-
[8]
Radioformer: A multiple-granularity radio map estimation transformer with 1‱spatial sampling,
Z. Fang, K. Liu, K. Chen, Q. Liu, J. Zhang, L. Song, and Y . Wang, “Radioformer: A multiple-granularity radio map estimation transformer with 1‱spatial sampling,” 2025. [Online]. Available: https://arxiv.org/abs/2504.19161
-
[9]
Kriging-based interference power constraint: Integrated design of the radio environment map and transmission power,
K. Sato and T. Fujii, “Kriging-based interference power constraint: Integrated design of the radio environment map and transmission power,” IEEE Transactions on Cognitive Communications and Networking, vol. 3, no. 1, pp. 13–25, 2017
2017
-
[10]
Fixed rank kriging for cellular coverage analysis,
H. Braham, S. B. Jemaa, G. Fort, E. Moulines, and B. Sayrac, “Fixed rank kriging for cellular coverage analysis,”IEEE Transactions on Vehicular Technology, vol. 66, no. 5, pp. 4212–4222, 2017
2017
-
[11]
Winips: Wifi-based non-intrusive indoor positioning system with online radio map construc- tion and adaptation,
H. Zou, M. Jin, H. Jiang, L. Xie, and C. J. Spanos, “Winips: Wifi-based non-intrusive indoor positioning system with online radio map construc- tion and adaptation,”IEEE Transactions on Wireless Communications, vol. 16, no. 12, pp. 8118–8130, 2017
2017
-
[12]
High-efficiency urban 3d radio map estimation based on sparse measurements,
X. Chen, X. Zhong, Z. Zhang, L. Dai, and S. Zhou, “High-efficiency urban 3d radio map estimation based on sparse measurements,”IEEE Transactions on Vehicular Technology, vol. 74, no. 10, pp. 16 488– 16 493, 2025
2025
-
[13]
Radio map crowdsourcing update method using sparse representation and low rank matrix recovery for wlan indoor positioning system,
Y . Zhang and L. Ma, “Radio map crowdsourcing update method using sparse representation and low rank matrix recovery for wlan indoor positioning system,”IEEE Wireless Communications Letters, vol. 10, no. 6, pp. 1188–1191, 2021
2021
-
[14]
Compressed tensor completion: Approach for uav-aided 3-d radio map construction,
K. Yin, S. Fang, F. Chu, and Y . Fan, “Compressed tensor completion: Approach for uav-aided 3-d radio map construction,”IEEE Internet of Things Journal, vol. 11, no. 24, pp. 40 516–40 531, 2024
2024
-
[15]
3d compressed spectrum mapping with sampling locations optimization in spectrum- heterogeneous environment,
F. Shen, Z. Wang, G. Ding, K. Li, and Q. Wu, “3d compressed spectrum mapping with sampling locations optimization in spectrum- heterogeneous environment,”IEEE Transactions on Wireless Communi- cations, vol. 21, no. 1, pp. 326–338, 2022
2022
-
[16]
Ra- diomamba: Breaking the accuracy-efficiency trade-off in radio map construction via a hybrid mamba-unet,
H. Jia, N. Cheng, X. Wang, C. Zhou, R. Sun, and X. Shen, “Ra- diomamba: Breaking the accuracy-efficiency trade-off in radio map construction via a hybrid mamba-unet,”IEEE Transactions on Network Science and Engineering, pp. 1–14, 2025
2025
-
[17]
Paying deformable attention to sparse spatial observations for deep radio map estimation,
K. Liu, C. Qiu, K. Chen, Q. Zheng, L. Song, and Y . Wang, “Paying deformable attention to sparse spatial observations for deep radio map estimation,”IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 1436–1450, 2026
2026
-
[18]
Uav trajectory optimization for spectrum cartography: A ppo approach,
L. Li, W. Li, J. Wang, X. Chen, Q. Peng, and W. Huang, “Uav trajectory optimization for spectrum cartography: A ppo approach,” IEEE Communications Letters, vol. 27, no. 6, pp. 1575–1579, 2023
2023
-
[19]
3d spectrum mapping based on roi-driven uav deployment,
Q. Wu, F. Shen, Z. Wang, and G. Ding, “3d spectrum mapping based on roi-driven uav deployment,”IEEE Network, vol. 34, no. 5, pp. 24–31, 2020
2020
-
[20]
Spectrum surveying: Active radio map estimation with autonomous uavs,
R. Shrestha, D. Romero, and S. P. Chepuri, “Spectrum surveying: Active radio map estimation with autonomous uavs,”IEEE Transactions on Wireless Communications, vol. 22, no. 1, pp. 627–641, 2023
2023
-
[21]
Simultaneous navigation and radio mapping for cellular-connected uav with deep reinforcement learning,
Y . Zeng, X. Xu, S. Jin, and R. Zhang, “Simultaneous navigation and radio mapping for cellular-connected uav with deep reinforcement learning,”IEEE Transactions on Wireless Communications, vol. 20, no. 7, pp. 4205–4220, 2021
2021
-
[22]
Energy-efficient aav coverage aware navigation under continuous dynamic constraints: An offlineonline radio map-enhanced drl method,
S. Zhao, F. Zhou, Q. Wu, and F. Shen, “Energy-efficient aav coverage aware navigation under continuous dynamic constraints: An offlineonline radio map-enhanced drl method,”IEEE Transactions on Communica- tions, vol. 74, pp. 899–913, 2026
2026
-
[23]
Online trajectory optimization for energy-efficient cellular-connected uavs with map reconstruction,
H. Zhao, Q. Hao, H. Huang, G. Gui, T. Ohtsuki, H. Sari, and F. Adachi, “Online trajectory optimization for energy-efficient cellular-connected uavs with map reconstruction,”IEEE Transactions on Vehicular Tech- nology, vol. 73, no. 3, pp. 3445–3456, 2024
2024
-
[24]
Adaptive informative path planning using deep reinforcement learning for uav-based active sensing,
J. Rckin, L. Jin, and M. Popovi, “Adaptive informative path planning using deep reinforcement learning for uav-based active sensing,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 4473–4479
2022
-
[25]
Bayesian active learning for sample efficient 5g radio map reconstruction,
K. D. Polyzos, A. Sadeghi, W. Ye, S. Sleder, K. Houssou, J. Calder, Z.-L. Zhang, and G. B. Giannakis, “Bayesian active learning for sample efficient 5g radio map reconstruction,”IEEE Transactions on Wireless Communications, vol. 23, no. 12, pp. 19 382–19 396, 2024
2024
-
[26]
A reinforcement learning framework for efficient informative sensing,
Y . Wei and R. Zheng, “A reinforcement learning framework for efficient informative sensing,”IEEE Transactions on Mobile Computing, vol. 21, no. 7, pp. 2306–2317, 2022
2022
-
[27]
Sparse bayesian learning-based 3-d radio environment map constructionsampling optimization, scenario-dependent dictionary construction, and sparse recovery,
J. Wang, Q. Zhu, Z. Lin, Q. Wu, Y . Huang, X. Cai, W. Zhong, and Y . Zhao, “Sparse bayesian learning-based 3-d radio environment map constructionsampling optimization, scenario-dependent dictionary construction, and sparse recovery,”IEEE Transactions on Cognitive Communications and Networking, vol. 10, no. 1, pp. 80–93, 2024
2024
-
[28]
Uav-aided efficient informative path planning for autonomous 3d spectrum mapping,
Y . Chen, Q. Zhu, J. Wang, Z. Jia, X. Wang, Z. Lin, Y . Huang, Q. Wu, and C. Briso-Rodrguez, “Uav-aided efficient informative path planning for autonomous 3d spectrum mapping,”IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 1664–1677, 2026
2026
-
[29]
Sparse bayesian learning-based hierarchical construction for 3d radio environment maps incorporating channel shadowing,
J. Wang, Q. Zhu, Z. Lin, J. Chen, G. Ding, Q. Wu, G. Gu, and Q. Gao, “Sparse bayesian learning-based hierarchical construction for 3d radio environment maps incorporating channel shadowing,”IEEE Transactions on Wireless Communications, vol. 23, no. 10, pp. 14 560– 14 574, 2024
2024
-
[30]
Learning-based optimization of the under-sampling pattern in mri,
C. D. Bahadir, A. V . Dalca, and M. R. Sabuncu, “Learning-based optimization of the under-sampling pattern in mri,” inInformation Processing in Medical Imaging, A. C. S. Chung, J. C. Gee, P. A. Yushkevich, and S. Bao, Eds. Cham: Springer International Publishing, 2019, pp. 780–792
2019
-
[31]
Active mr k-space sampling with reinforcement learning,
L. Pineda, S. Basu, A. Romero, R. Calandra, and M. Drozdzal, “Active mr k-space sampling with reinforcement learning,” inMedical Image Computing and Computer Assisted Intervention – MICCAI 2020, A. L. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 13 Martel, P. Abolmaesumi, D. Stoyanov, D. Mateus, M. A. Zuluaga, S. K. Zhou, D. Racoceanu, and L....
2020
-
[32]
Radio environment map construction based on gaussian process with positional uncertainty,
P. Zhen, B. Zhang, Y .-Q. Xu, Z. Chen, H. Wang, and D. Guo, “Radio environment map construction based on gaussian process with positional uncertainty,”IEEE Wireless Communications Letters, vol. 11, no. 8, pp. 1639–1643, 2022
2022
-
[33]
T. M. Cover and J. A. Thomas,Elements of Information Theory. John Wiley & Sons, 2012
2012
-
[34]
Dataset of pathloss and toa radio maps with localization application,
C. Yapar, R. Levie, G. Kutyniok, and G. Caire, “Dataset of pathloss and toa radio maps with localization application,” 2022. [Online]. Available: https://dx.doi.org/10.21227/0gtx-6v30
-
[35]
Generative ai on spectrumnet: An open benchmark of multiband 3- d radio maps,
S. Zhang, S. Jiang, W. Lin, Z. Fang, K. Liu, H. Zhang, and K. Chen, “Generative ai on spectrumnet: An open benchmark of multiband 3- d radio maps,”IEEE Transactions on Cognitive Communications and Networking, vol. 11, no. 2, pp. 886–901, 2025
2025
-
[36]
Optimal distance- constrained path planning for sparse radio map recovery,
F. Qiu, K. Liu, L. Zou, J. Liu, and K. Chen, “Optimal distance- constrained path planning for sparse radio map recovery,” in2025 IEEE 102nd Vehicular Technology Conference (VTC2025-Fall), 2025, pp. 1–5
2025
-
[37]
U-net: Convolutional networks for biomedical image segmentation,
O. Ronneberger, P. Fischer, and T. Brox, “U-net: Convolutional networks for biomedical image segmentation,” inMedical Image Computing and Computer-Assisted Intervention - MICCAI 2015 - 18th International Conference Munich, Germany, October 5 - 9, 2015, Proceedings,, N. Navab, J. Hornegger, W. M. W. III, and A. F. Frangi, Eds
2015
-
[38]
CBAM: convolutional block attention module,
S. Woo, J. Park, J. Lee, and I. S. Kweon, “CBAM: convolutional block attention module,” inComputer Vision - ECCV 2018 - 15th European Conference, Munich, Germany, September 8-14, 2018, Proceedings,, V . Ferrari, M. Hebert, C. Sminchisescu, and Y . Weiss, Eds
2018
-
[39]
On the comparison of bilinear, cubic spline, and fuzzy interpolation techniques for robotic position measurements,
Y . Bai and H. Zhuang, “On the comparison of bilinear, cubic spline, and fuzzy interpolation techniques for robotic position measurements,” IEEE Transactions on Instrumentation and Measurement, vol. 54, no. 6, pp. 2281–2288, 2005
2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.