Teleoperation Operational Design Domain based on Minimal Risk Maneuver Capability
Pith reviewed 2026-06-29 05:47 UTC · model grok-4.3
The pith
Teleoperated road vehicles can base their operational design domain on the capability to perform a minimal risk maneuver with a dedicated independent system.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
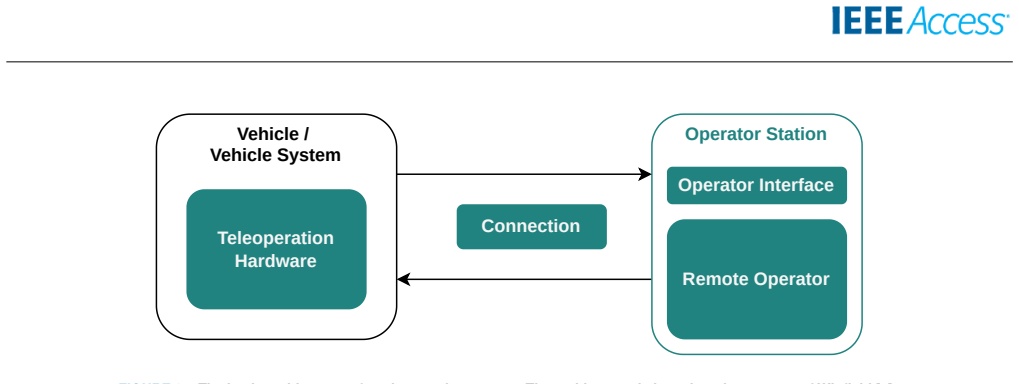
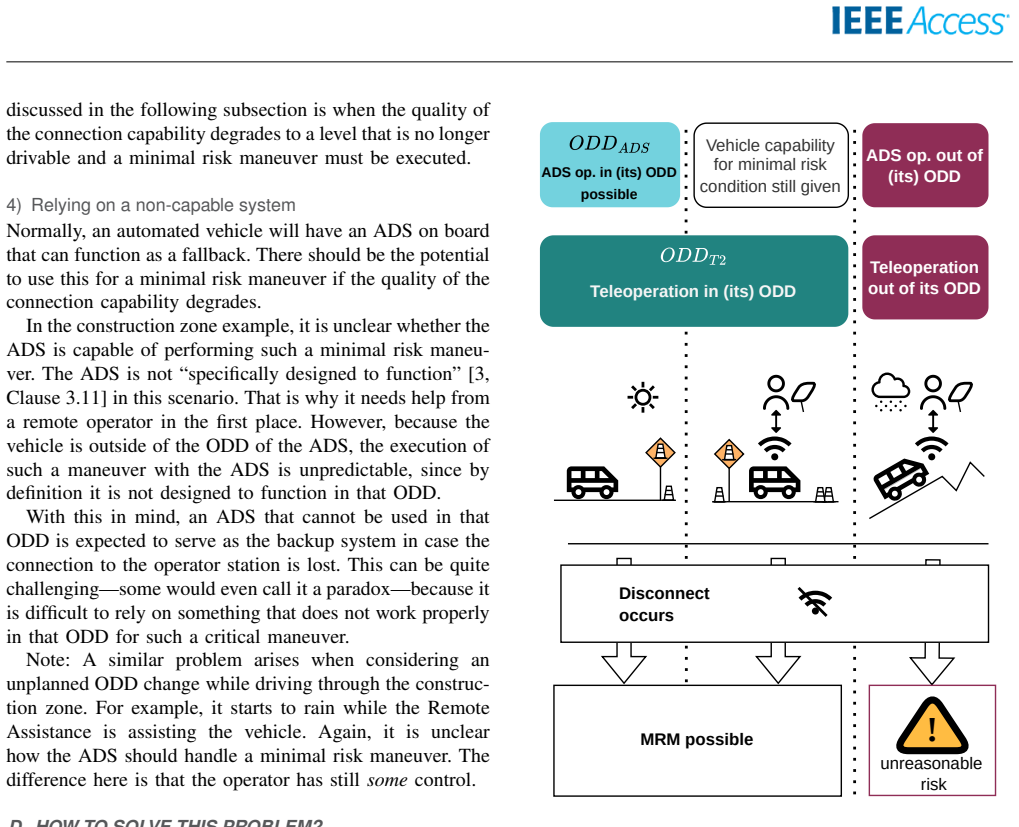
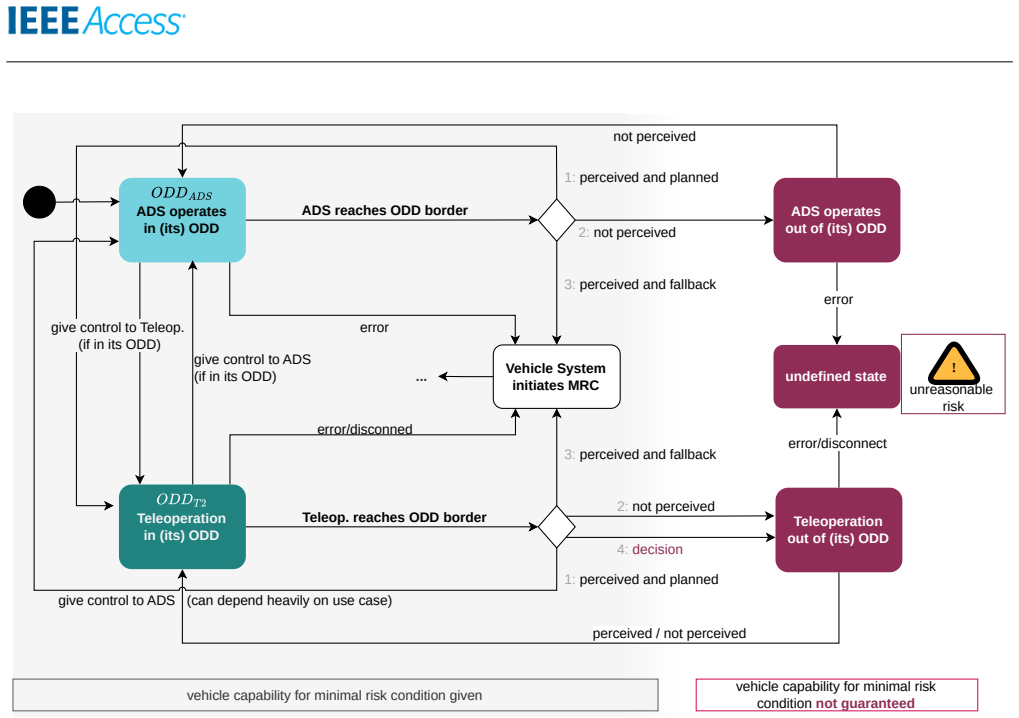
The ODD for a teleoperation system is based on the capability of the teleoperated vehicle to perform a minimal risk maneuver using a dedicated system designed solely for this purpose.
What carries the argument
The dedicated minimal risk maneuver system, which operates independently of the teleoperator and network to manage failures.
Load-bearing premise
A dedicated minimal risk maneuver system can be designed and verified to handle all relevant failure scenarios independently of the teleoperator and network without introducing new unaddressed risks.
What would settle it
A real teleoperation test in which the dedicated system fails to resolve a network outage or vehicle fault safely would show the proposed ODD basis does not hold.
Figures



read the original abstract
This article discusses the concept of an Operational Design Domain (ODD) designed specifically for teleoperated road vehicles. For this purpose, the ODD concept designed for automated driving is adapted for teleoperation. As teleoperation becomes more common in regular traffic, the question arises under which operating conditions such vehicles are able and allowed to drive. Currently, these conditions are selected primarily based on network performance. From a safety perspective, it is difficult to base such a selection on a reliable connection because it is almost impossible to guarantee sufficient reliability. With this in mind, the ODD concept designed for automated driving is adapted for teleoperation: A concept is proposed for basing the ODD for a teleoperation system on the capability of the teleoperated vehicle to perform a minimal risk maneuver using a dedicated system designed solely for this purpose. This concept is then demonstrated using a use case example.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes adapting the Operational Design Domain (ODD) concept from automated driving to teleoperated road vehicles by defining the ODD based on the vehicle's ability to execute a minimal risk maneuver (MRM) via a dedicated system that operates independently of the teleoperator and network, rather than relying on network performance guarantees. The proposal is presented as a conceptual shift and illustrated with a use-case example.
Significance. If the central framing holds, the work could contribute a safety-oriented redefinition of ODD for teleoperation that avoids dependence on unverifiable network reliability. The manuscript offers no machine-checked proofs, parameter-free derivations, or quantitative validation, so its significance rests on whether the conceptual shift can be developed into an engineering solution with verifiable independence of the dedicated MRM system.
major comments (1)
- [Abstract and use-case example] Abstract and use-case example: the claim that the dedicated MRM system can be designed and verified to handle all relevant failure scenarios independently of the teleoperator and network is load-bearing for the proposed ODD definition, yet the manuscript supplies no architecture, sensor/actuator specification, decision logic, or failure-mode enumeration to demonstrate that the system's failure modes are disjoint from the primary teleoperation path.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback on our conceptual proposal. The manuscript adapts the ODD concept for teleoperation by anchoring it to the vehicle's independent MRM capability rather than network guarantees. Below we respond point-by-point to the major comment.
read point-by-point responses
-
Referee: [Abstract and use-case example] Abstract and use-case example: the claim that the dedicated MRM system can be designed and verified to handle all relevant failure scenarios independently of the teleoperator and network is load-bearing for the proposed ODD definition, yet the manuscript supplies no architecture, sensor/actuator specification, decision logic, or failure-mode enumeration to demonstrate that the system's failure modes are disjoint from the primary teleoperation path.
Authors: We agree that independence of the dedicated MRM system is a foundational assumption for the proposed ODD definition. The manuscript is explicitly framed as a conceptual contribution that redefines the ODD in terms of this capability; it does not claim to deliver an engineering design or verification of any specific MRM implementation. The use-case example is intended only to illustrate how the resulting ODD would be applied in practice, not to enumerate failure modes or provide sensor/actuator details. Such concrete architecture, decision logic, and disjoint-failure-mode analysis would be required for any real deployment but lie outside the scope of the present conceptual paper. We will revise the abstract, introduction, and conclusion to state this scope limitation more explicitly and to note that engineering and verifying an independent MRM system constitutes necessary future work. revision: partial
Circularity Check
No circularity; conceptual redefinition without derivations or self-referential reductions
full rationale
The paper proposes a definitional adaptation of the ODD concept for teleoperation, grounding it in the vehicle's ability to perform an MRM via a dedicated independent system. No equations, fitted parameters, predictions, or mathematical derivations appear in the provided text. The central claim is presented as a conceptual shift illustrated by a use-case example rather than a result derived from prior fitted quantities or self-citations. No load-bearing self-citation chains, uniqueness theorems imported from the authors' prior work, or ansatzes smuggled via citation are present. The manuscript is therefore self-contained as a high-level engineering proposal with no reduction of outputs to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Network performance cannot be guaranteed with sufficient reliability for safety-critical decisions.
- domain assumption A dedicated MRM system can be designed solely for fallback without depending on the primary teleoperation link.
invented entities (1)
-
Dedicated minimal risk maneuver system
no independent evidence
Reference graph
Works this paper leans on
-
[1]
The British Standards Institution 2023, BSI Flex 1886 System aspects for remote operation of vehicles – Guide, 2023
2023
-
[2]
Technical report of the working group “Research Needs in Teleoperation
WG Research Needs in Teleoperation, “Technical report of the working group “Research Needs in Teleoperation”,” Federal High- way Res. Inst., Bergisch Gladbach, Germany, Tech. Rep. 2023
2023
-
[3]
Standard J3016, 2021
Taxonomy and Definitions for Terms Related to Driving Automa- tion Systems for On-Road Motor Vehicles, SAE Int. Standard J3016, 2021
2021
-
[4]
Future Directions in Tele-operated Robotics,
A. F. Winfield, “Future Directions in Tele-operated Robotics,” p. 17, 2009
2009
-
[5]
D. Majstorovic, S. Hoffmann, F. Pfab, A. Schimpe, M.-M. Wolf, and F. Diermeyer, Survey on Teleoperation Concepts for Auto- mated Vehicles, 2022. Accessed: Aug. 29, 2022. [Online]. Avail- able: http://arxiv.org/abs/2208.08876
-
[6]
Accessed: May 29, 2024
Fleet response: Lending a helpful hand to Waymo’s autonomously driven vehicles, 2024. Accessed: May 29, 2024. [Online]. Avail- able: https://waymo.com/blog/2024/05/fleet-response
2024
-
[7]
O. Hans, B. Walter, and H.-L. Ross, Our teledriving-first approach: How we build teledrive technology around safety and the human driver, 2024
2024
-
[8]
Evaluation of Remote Driver Performance in Urban Environment Operational Design Domains,
O. Hans, B. Walter, and J. Adamy, “Evaluation of Remote Driver Performance in Urban Environment Operational Design Domains,” IEEE Open J. Intell. Transp. Syst., vol. 6, pp. 722–737, 2025. DOI: 10.1109/OJITS.2025.3574692 Accessed: Dec. 8, 2025. [Online]. Available: https://ieeexplore.ieee.org/document/11017673/
-
[9]
O. Hans and J. Adamy, Identification and Classification of Human Performance related Challenges during Remote Driving, 2025. DOI: 10 . 48550 / arXiv . 2503 . 09865 Accessed: Mar. 18, 2025. [Online]. Available: http://arxiv.org/abs/2503.09865
-
[10]
Road Vehicles - Test scenarios for automated driving systems - Specification for operational design domain, Int. Org. Standardiza- tion Standard ISO 34503, 2023
2023
-
[11]
Commission Implementing Regulation (EU) 2022-1426,
European Union, “Commission Implementing Regulation (EU) 2022-1426,” Official J. Eur. Union, vol. L 221/1, 2022
2022
-
[12]
Road vehicles — Safety and cybersecurity for automated driving systems — Design, verification and validation,
ISO, “Road vehicles — Safety and cybersecurity for automated driving systems — Design, verification and validation,” Int. Org. Standardization, Geneva, Switzerland, Tech. Rep. ISO/TR 4804, 2020
2020
-
[13]
Safety concept for autonomous vehicles,
A. Reschka, “Safety concept for autonomous vehicles,” in Auton. Driving: Tech., Legal Social Aspects, M. Maurer, J. C. Gerdes, B. Lenz, and H. Winner, Eds., Berlin, Heidelberg: Springer, 2016, pp. 473–496. DOI: 10.1007/978-3-662-48847-8_23
-
[14]
N. F. Salem et al., “Safety and risk—why their definitions matter,” in Handbook Assisted Automated Driving, Wiesbaden: Springer Fachmedien Wiesbaden, 2026, pp. 779–800. DOI: 10.1007/978-3- 658-45276-6_40 [Online]. Available: https://doi.org/10.1007/978- 3-658-45276-6_40
-
[15]
Fleischer, Safety and Acceptance – A View of Two Mysteries, 2023
T. Fleischer, Safety and Acceptance – A View of Two Mysteries, 2023
2023
-
[16]
Taxonomy to Unify Fault Tolerance Regimes for Automotive Systems: Defining Fail-Operational, Fail-Degraded, and Fail-Safe,
T. Stolte et al., “Taxonomy to Unify Fault Tolerance Regimes for Automotive Systems: Defining Fail-Operational, Fail-Degraded, and Fail-Safe,” IEEE Trans. Intell. Veh., vol. 7, no. 2, pp. 251–262,
-
[17]
IEEE Transactions on Intelligent Vehicles8(4), 2650–2660 (Apr 2023).https://doi.org/10.1109/tiv
DOI: 10.1109/TIV .2021.3129933 Accessed: Dec. 21, 2022. [Online]. Available: https://ieeexplore.ieee.org/document/9625720/
work page doi:10.1109/tiv 2021
-
[18]
Road Vehicles - Safety of the Intended Functionality, Int. Org. Standardization Standard ISO 21448, 2022
2022
-
[19]
Safe Halt as Fail-safe Concept for Automated Driving Systems,
S. Ackermann, “Safe Halt as Fail-safe Concept for Automated Driving Systems,” Ph.D. dissertation, Tech. Univ. Darmstadt, Darmstadt, 2023. [Online]. Available: https : / / tuprints . ulb . tu - darmstadt.de/id/eprint/24192
2023
-
[20]
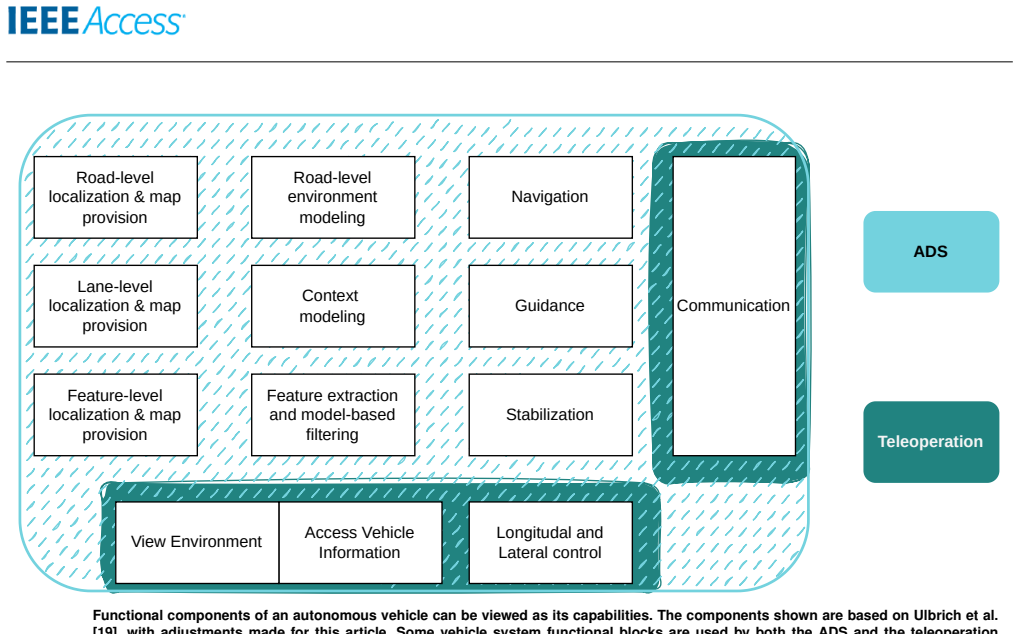
Towards a Functional System Architecture for Automated Vehicles
S. Ulbrich et al., Towards a Functional System Architecture for Automated Vehicles, 2017. Accessed: Aug. 11, 2023. [Online]. Available: http://arxiv.org/abs/1703.08557
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[21]
A. Reschka, “Fertigkeiten- und Fähigkeitengraphen als Grund- lage des sicheren Betriebs von automatisierten Fahrzeugen im öffentlichen Straßenverkehr in städtischer Umgebung,” Ph.D. dis- sertation, Tech. Univ. Braunschweig, 2017. DOI: 10.24355/DBBS. 084- 201707280929 Accessed: Sep. 4, 2023. [Online]. Available: https://leopard.tu-braunschweig.de/receive/d...
-
[22]
ISO/IEC 19540:2022Information Technology - Object Manage- ment Group Unified Architecture Framework (OMG UAF), 2022
2022
-
[23]
Werte- und fähigkeitsbasierte Bewegungsplanung für autonome Straßenfahrzeuge – Ein systemischer Ansatz,
M. Nolte, “Werte- und fähigkeitsbasierte Bewegungsplanung für autonome Straßenfahrzeuge – Ein systemischer Ansatz,” Ph.D. dissertation, Tech. Univ. Braunschweig, Braunschweig, 2025
2025
-
[24]
Aström and R. M. Murray, Feedback Systems: An Introduction for Scientists and Engineers, 2nd. Princeton, NJ: Princeton Univ. Press, 2012
2012
-
[25]
R. E. Kalman, P. L. Falb, and M. A. Arbib, Topics in Mathematical System Theory. New York: McGraw-Hill, 1969
1969
-
[26]
Ergonomics of Human-System Interaction – Part 110: Interaction Principles,
International Organization for Standardization, “Ergonomics of Human-System Interaction – Part 110: Interaction Principles,” ISO, Geneva, Switzerland, Int. Standard ISO 9241-110:2020. [Online]. Available: https://www.iso.org/standard/75258.html
2020
-
[27]
Leon Johann Brettin, Niklas Braun, Robert Graubohm, and Markus Maurer, “Safety Blind Spot in Remote Driving: Considerations for Risk Assessment of Connection Loss Fallback Strategies,” 2025. [Online]. Available: https://arxiv.org/abs/2502.10243
-
[28]
Verordnung über Ausnahmen von straßenverkehrsrechtlichen V orschriften für ferngelenkte Kraftfahrzeuge (Straßenverkehr- Fernlenk-Verordnung – StVFernLV), 2025
2025
-
[29]
Autonome-Fahrzeuge-Genehmigungs-und-Betriebs-Verordnung - AFGBV, 2022
2022
-
[30]
O. Hans, M. Avezum, S. Borysov, H.-L. Ross, and J. Adamy, “Operational Design Domain Qualification Framework for Re- motely Driven Vehicles in Urban Environment,” in 2023 IEEE Int. Automated Veh. Validation Conf. (IA VVC), Austin, TX, USA: IEEE, pp. 1–6. DOI: 10 . 1109 / IA VVC57316 . 2023 . 10328142 Accessed: Dec. 18, 2023. [Online]. Available: https://i...
-
[31]
Hans and B
O. Hans and B. Walter, ODD design for automated and remote driving systems: A path to remotely backed autonomy, 2025. DOI: 10 . 36227 / techrxiv. 174063005 . 51887553 / v1 Accessed: Mar. 7,
2025
-
[32]
[Online]. Available: https : / / www . techrxiv . org / users / 894908/articles/1271408-odd-design-for-automated-and-remote- driving-systems-a-path-to-remotely-backed-autonomy?commit= 319c483747587a727a5ade863b416ada2ff12ea6
-
[33]
Remote Assistance or Remote Driving: The Impact of Operational Design Domains on ADS-Supporting Systems Selection,
O. Hans and B. Walter, “Remote Assistance or Remote Driving: The Impact of Operational Design Domains on ADS-Supporting Systems Selection,” in 2025 IEEE Int. Automated Veh. Validation Conf. (IA VVC), Baden-Baden, Germany: IEEE, pp. 1–7. DOI: 10 . 1109 / IA VVC61942 . 2025 . 11219535 Accessed: Jan. 2, 2026. [Online]. Available: https : / / ieeexplore . iee...
2025
-
[34]
Safety Assurance for Highly Automated Driving – The PEGASUS Approach,
W. Wachenfeld and P. Junietz, “Safety Assurance for Highly Automated Driving – The PEGASUS Approach,” in Automated Veh. Symp., San Francisco, CA, USA, 2016. [Online]. Available: https : / / www . pegasusprojekt . de / files / tmpl / pdf / Automation % 20Vehicle%20Symposium%202016%20Folien.pdf
2016
-
[35]
Kfoury, Jorge Crichigno, and Elias Bou-Harb
M. Scholtes et al., “6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment,” IEEE Access, vol. 9, pp. 59 131–59 147, 2021. DOI: 10.1109/ACCESS.2021. 3072739 Accessed: Mar. 24, 2025. [Online]. Available: https : / / ieeexplore.ieee.org/document/9400833/
-
[36]
Schlussbericht für das Gesamtprojekt,
“Schlussbericht für das Gesamtprojekt,” Tech. Rep., 2020. Ac- cessed: Mar. 25, 2024. [Online]. Available: https : / / www . pegasusprojekt . de / files / tmpl / pdf / PEGASUS _ Abschlussbericht _ Gesamtprojekt.PDF
2020
-
[37]
Accessed: Mar
The PEGASUS Method. Accessed: Mar. 24, 2025. [Online]. Avail- able: https://www.pegasusprojekt.de/en/pegasus-method
2025
-
[38]
Ein Beitrag für methodischen Test von automatisierten Fahrfunktionen,
F. Schuldt, “Ein Beitrag für methodischen Test von automatisierten Fahrfunktionen,” Ph.D. dissertation, Tech. Univ. Braunschweig, Braunschweig, 2017
2017
-
[39]
Wissens- basierte Szenariengenerierung für Betriebsszenarien auf deutschen Autobahnen,
G. Bagschik, T. Menzel, C. Korner, and M. Maurer, “Wissens- basierte Szenariengenerierung für Betriebsszenarien auf deutschen Autobahnen,” vol. 12, Walting, Germany, 2018
2018
-
[40]
Ontology based Scene Creation for the Development of Automated Vehicles
G. Bagschik, T. Menzel, and M. Maurer, Ontology based Scene Creation for the Development of Automated Vehicles, 2018. Ac- cessed: Nov. 2, 2023. [Online]. Available: http://arxiv.org/abs/ 1704.01006 VOLUME 4, 2016 17
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[41]
Data basis for scenario-based validation of HAD on highways,
J. Bock, R. Krajewski, L. Eckstein, J. Klimke, J. Sauerbier, and A. Zlocki, “Data basis for scenario-based validation of HAD on highways,” in 27th Aachen Colloq. Automob. Engine Technol., 2018
2018
-
[42]
Zusammenfassender Abschlussbericht,
Adam Bachorek et al., “Zusammenfassender Abschlussbericht,” Tech. Rep. 1.0, 2024
2024
-
[43]
Toward Automated Vehicle Teleoperation: Vision, Opportunities, and Challenges,
T. Zhang, “Toward Automated Vehicle Teleoperation: Vision, Opportunities, and Challenges,” IEEE Internet Things J., vol. 7, no. 12, pp. 11 347–11 354, 2020. DOI: 10.1109/JIOT.2020.3028766 Accessed: Dec. 6, 2023. [Online]. Available: https://ieeexplore. ieee.org/document/9214882/
-
[44]
Der Mensch als Sensor - Der Weg zum teleoperierten Fahren,
D. F. Diermeyer, S. Gnatzig, F. Chucholowski, T. Tang, and D. M. Lienkamp, “Der Mensch als Sensor - Der Weg zum teleoperierten Fahren,” Conf.: AAET - Automatisierungssysteme, Assistenzsys- teme und eingebettete Syst.e für Transportmittel, p. 16, 2011
2011
-
[45]
Teleop- erated Road Vehicles – The
T. Tang, P. Vetter, S. Finkl, K. Figel, and M. Lienkamp, “Teleop- erated Road Vehicles – The ”Free Corridor” as a Safety Strategy Approach,” Appl. Mech. Mater., vol. 490-491, pp. 1399–1409,
-
[46]
4028 / www
DOI: 10 . 4028 / www. scientific . net / AMM . 490 - 491 . 1399 Accessed: Dec. 5, 2023. [Online]. Available: https://www.scientific. net/AMM.490-491.1399
2023
-
[47]
Safe Corridor: A Trajectory-Based Safety Concept for Teleoperated Road Vehicles,
S. Hoffmann, D. Majstorovic, and F. Diermeyer, “Safe Corridor: A Trajectory-Based Safety Concept for Teleoperated Road Vehicles,” in 2022 Int. Conf. Connected Veh. Expo (ICCVE), Lakeland, FL, USA: IEEE, pp. 1–6. DOI: 10.1109/ICCVE52871.2022.9742770 Accessed: Dec. 6, 2023. [Online]. Available: https://ieeexplore. ieee.org/document/9742770/
-
[48]
Towards a Driver Support System for Teleoperated Driving,
S. Neumeier and C. Facchi, “Towards a Driver Support System for Teleoperated Driving,” in 2019 IEEE Intell. Transp. Syst. Conf. (ITSC), Auckland, New Zealand: IEEE, pp. 4190–4196. DOI: 10.1109/ITSC.2019.8917244 Accessed: Dec. 5, 2023. [Online]. Available: https://ieeexplore.ieee.org/document/8917244/
-
[49]
Measuring the Feasibility of Teleoperated Driving in Mobile Networks,
S. Neumeier, E. A. Walelgne, V . Bajpai, J. Ott, and C. Facchi, “Measuring the Feasibility of Teleoperated Driving in Mobile Networks,” in 2019 Netw. Traffic Meas. Anal. Conf. (TMA), Paris, France: IEEE, pp. 113–120. DOI: 10.23919/TMA.2019.8784466 Accessed: Feb. 7, 2025. [Online]. Available: https : / / ieeexplore . ieee.org/document/8784466/
-
[50]
Risk-Aware Shared Control for Teleoperation of Automated Vehicles in Dynamic Environments,
D. Brecht and F. Diermeyer, “Risk-Aware Shared Control for Teleoperation of Automated Vehicles in Dynamic Environments,” in 2024 IEEE Int. Conf. Syst., Man, Cybern. (SMC), Kuching, Malaysia: IEEE, pp. 3269–3274. DOI: 10.1109/SMC54092.2024. 10831424 Accessed: Apr. 7, 2025. [Online]. Available: https : / / ieeexplore.ieee.org/document/10831424/
-
[51]
The British Standards Institution 2025, BSI Flex 1887 Human factors for remote operations of vehicles – Guide, 2025
2025
-
[52]
Standard, Geneva, Switzerland, 2023
ISO, ISO 34503 Road Vehicles - Test scenarios for automated driving systems - Specification for operational design domain, Int. Standard, Geneva, Switzerland, 2023
2023
-
[53]
A Two-Level Abstraction ODD Definition Language: Part II,
P. Irvine, X. Zhang, S. Khastgir, E. Schwalb, and P. Jennings, “A Two-Level Abstraction ODD Definition Language: Part I,” in 2021 IEEE Int. Conf. Syst., Man, Cybern. (SMC), pp. 2614–2621. DOI: 10.1109/SMC52423.2021.9658751
-
[54]
A Two-Level Abstraction ODD Definition Language: Part II,
E. Schwalb, P. Irvine, X. Zhang, S. Khastgir, and P. Jennings, “A Two-Level Abstraction ODD Definition Language: Part II,” in 2021 IEEE Int. Conf. Syst., Man, Cybern. (SMC), pp. 1669–1676. DOI: 10.1109/SMC52423.2021.9658812
-
[55]
Operational Design Domain for Automated Driving Systems: Taxonomy Definition and Application,
L. Mendiboure, M. L. Benzagouta, D. Gruyer, T. Sylla, M. Aded- jouma, and A. Hedhli, “Operational Design Domain for Automated Driving Systems: Taxonomy Definition and Application,” in 2023 IEEE Intell. Veh. Symp. (IV), pp. 1–6. DOI: 10.1109/IV55152. 2023.10186765
-
[56]
An Automated Vehicle Safety Concept Based on Runtime Restriction of the Operational Design Domain,
I. Colwell, B. Phan, S. Saleem, R. Salay, and K. Czarnecki, “An Automated Vehicle Safety Concept Based on Runtime Restriction of the Operational Design Domain,” in 2018 IEEE Intell. Veh. Symp. (IV), pp. 1910–1917. DOI: 10.1109/IVS.2018.8500530
-
[57]
Autonomous Vehicles Meet the Physical World: RSS, Variability, Uncertainty, and Proving Safety,
P. Koopman, B. Osyk, and J. Weast, “Autonomous Vehicles Meet the Physical World: RSS, Variability, Uncertainty, and Proving Safety,” in Comput. Saf., Rel., Secur. A. Romanovsky, E. Troubit- syna, and F. Bitsch, Eds., vol. 11698, Cham: Springer Int. Pub- lishing, 2019, pp. 245–253. DOI: 10.1007/978-3-030-26601-1_17 Accessed: Sep. 27, 2023. [Online]. Availa...
-
[58]
Towards a Specified Operational Design Domain for a Safe Remote Driving of Trains,
A. Tonk, A. Boussif, J. Beugin, and S. Collart-Dutilleul, “Towards a Specified Operational Design Domain for a Safe Remote Driving of Trains,” in Proc. 31st Eur. Saf. Rel. Conf. (ESREL 2021), Res. Publishing Services, pp. 2128–2135. DOI: 10.3850/978-981-18- 2016 - 8 _ 504 - cd Accessed: Feb. 12, 2025. [Online]. Available: https://rpsonline.com.sg/proceedi...
-
[59]
Standard, Geneva, Switzerland, 2024
ISO 23793-1 Intelligent transport systems — Minimal risk ma- noeuvre (MRM) for automated driving — Part 1: Framework, straight-stop and in-lane stop, Int. Standard, Geneva, Switzerland, 2024
2024
-
[60]
Investigating Intervention Road Scenarios for Teleoperation of Autonomous Vehicles,
F. Tener and J. Lanir, “Investigating Intervention Road Scenarios for Teleoperation of Autonomous Vehicles,” SSRN, preprint, 2023. DOI: 10.2139/ssrn.4423621 Accessed: Dec. 12, 2023. [Online]. Available: https://www.ssrn.com/abstract=4423621
-
[61]
Teleoperation: The Holy Grail to Solve Problems of Automated Driving? Sure, but Latency Matters,
S. Neumeier, P. Wintersberger, A.-K. Frison, A. Becher, C. Facchi, and A. Riener, “Teleoperation: The Holy Grail to Solve Problems of Automated Driving? Sure, but Latency Matters,” in Proc. 11th Int. Conf. Automot. User Interfaces Interactive Veh. Appl., Utrecht Netherlands: ACM, 2019, pp. 186–197. DOI: 10.1145/3342197. 3344534 Accessed: Dec. 6, 2023. [On...
-
[62]
Sensor and Actuator Latency during Teleoperation of Automated Vehicles,
J.-M. Georg, J. Feiler, S. Hoffmann, and F. Diermeyer, “Sensor and Actuator Latency during Teleoperation of Automated Vehicles,” in 2020 IEEE Intell. Veh. Symp. (IV), Las Vegas, NV , USA: IEEE, pp. 760–766. DOI: 10 . 1109 / IV47402 . 2020 . 9304802 Accessed: Jul. 17, 2024. [Online]. Available: https : / / ieeexplore . ieee . org / document/9304802/
-
[63]
Brecht et al., Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements, 2024
D. Brecht et al., Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements, 2024. Accessed: Jun. 18,
2024
-
[64]
Available: http://arxiv.org/abs/2404.15030
[Online]. Available: http://arxiv.org/abs/2404.15030
-
[65]
Hanna Koskinen, Andreas Schrank, Esko Lehtonen, and Michael Oehl, “Analyzing the Remote Operation Task to Support Highly Automated Vehicles – Suggesting the Core Task Analysis to Ensure the Human-Centered Design of the Remote Operation Station,” in HCI Mobility, Transport, Automot. Syst. Ser. Lecture Notes Comput. Sci. V ol. 14732, Cham: Springer Nature S...
-
[66]
Road Vehicles - Functional Safety, Int. Org. Standardization Stan- dard ISO 26262, 2018
2018
-
[67]
Accessed: Dec
Deutscher Bundestag, Straßenverkehrsgesetz. Accessed: Dec. 5,
-
[68]
Available: https://www.gesetze- im- internet.de/ stvg/
[Online]. Available: https://www.gesetze- im- internet.de/ stvg/
-
[69]
Federal Ministry for Digital and Transport, Ordinance on the Approval and Operation of Autonomous Motor Vehicles (AFGBV),
-
[70]
Available: https://www.gesetze- im- internet.de/ afgbv/ LEON JOHANN BRETTINreceived the B.Sc
[Online]. Available: https://www.gesetze- im- internet.de/ afgbv/ LEON JOHANN BRETTINreceived the B.Sc. degree in computer sciene from Ostfalia Univer- sity of Applied Sciences, Wolfenbüttel, Germany (2017) and the M.Sc. degree in computer science from Technische Universität Braunschweig, Ger- many (2021). He is currently a Research Asso- ciate with the I...
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.