Vehicle Overacceleration -- A Fundamental Microscopic Mechanism for Traffic Breakdown Control Using Automated Vehicles and AI
Pith reviewed 2026-06-28 20:05 UTC · model grok-4.3
The pith
Traffic breakdown at bottlenecks is governed by vehicle overacceleration rather than overdeceleration in both human-driven and automated traffic.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In both human-driven and automated traffic flow, traffic breakdown is governed by vehicle overacceleration rather than vehicle overdeceleration. This conclusion follows from microscopic modeling that separates traffic breakdown caused by overacceleration from traffic instabilities caused by overdeceleration due to braking behavior.
What carries the argument
Microscopic modeling separation of traffic breakdown caused by overacceleration from instabilities caused by overdeceleration due to braking behavior.
If this is right
- Automated vehicle control algorithms can target prevention of overacceleration to suppress breakdown nucleation.
- The same overacceleration mechanism applies to human-driven traffic, so driver assistance systems should address acceleration discontinuities.
- AI-managed traffic at bottlenecks can use individual vehicle dynamics to maintain flow stability.
- Mixed fleets of human and automated vehicles remain subject to the same breakdown trigger.
Where Pith is reading between the lines
- Traffic management could monitor acceleration profiles in real time to predict and avert breakdowns before they nucleate.
- Vehicle design standards might shift emphasis toward smooth acceleration limits rather than only braking response.
- The distinction between the two mechanisms could be tested in other congested flow systems such as pedestrian movement or supply chains.
Load-bearing premise
Microscopic modeling can reliably separate traffic breakdown caused by overacceleration from traffic instabilities caused by overdeceleration due to braking behavior.
What would settle it
A simulation or field observation in which traffic breakdown occurs at a bottleneck solely through sequences of overdeceleration with no overacceleration present would falsify the central claim.
Figures












read the original abstract
This review article addresses a fundamental controversial question in traffic theory: Is the nucleation character of traffic breakdown at a bottleneck governed by vehicle overdeceleration (overbraking) or by discontinuous vehicle acceleration, referred to as vehicle overacceleration. This question is of particular importance in the context of automated vehicles and AI, whose individual dynamic behavior can enable reliable strategies for traffic breakdown control in the future. We show that, in both human-driven and automated traffic flow, traffic breakdown is governed by vehicle overacceleration rather than vehicle overdeceleration. With this objective, in microscopic modeling we separate traffic breakdown caused by overacceleration from traffic instabilities caused by overdeceleration due to braking behavior, while following recent papers [Phys. Rev. E 108, 014302 (2023); 108, 064305 (2023); 112, 034309 (2025)].
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This review article claims that traffic breakdown at bottlenecks is governed by vehicle overacceleration (discontinuous acceleration) rather than overdeceleration (overbraking) in both human-driven and automated traffic. The conclusion is reached via microscopic modeling that separates overacceleration-induced breakdown from overdeceleration instabilities, following the separation procedure in the author's cited Phys. Rev. E papers from 2023 and 2025.
Significance. If the modeling separation is robust, the result would reframe the nucleation mechanism of traffic breakdown and open pathways for AV and AI-based control strategies that target overacceleration behavior to suppress breakdowns, with potential benefits for traffic flow stability.
major comments (2)
- [Abstract] Abstract: the claim that microscopic modeling separates traffic breakdown caused by overacceleration from instabilities caused by overdeceleration is asserted without any description of the data, simulation setup, error handling, or validation metrics used to achieve the separation.
- [Abstract] Abstract (and referenced modeling): the separation procedure is stated to follow Phys. Rev. E 108, 014302 (2023), 108, 064305 (2023), and 112, 034309 (2025), yet the manuscript contains no robustness checks against variations in braking parameters, reaction times, or alternative deceleration rules that could couple the two mechanisms.
minor comments (1)
- Clarify in the text which results are new to this review versus direct summaries of the cited prior works.
Simulated Author's Rebuttal
We thank the referee for the detailed review and valuable feedback on our manuscript. The paper is a review article that builds upon our previous Phys. Rev. E publications to argue that vehicle overacceleration governs traffic breakdown. We address each major comment below and indicate the revisions we will make to enhance the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that microscopic modeling separates traffic breakdown caused by overacceleration from instabilities caused by overdeceleration is asserted without any description of the data, simulation setup, error handling, or validation metrics used to achieve the separation.
Authors: We agree that the abstract, being concise, does not provide details on the simulation data, setup, error handling, or validation metrics. As this is a review summarizing results from our cited works, these elements are fully described in Phys. Rev. E 108, 014302 (2023), 108, 064305 (2023), and 112, 034309 (2025), including comparisons with empirical data and validation procedures. We will revise the abstract to include a brief statement referencing the modeling framework and validation in those papers, improving transparency for readers. revision: yes
-
Referee: [Abstract] Abstract (and referenced modeling): the separation procedure is stated to follow Phys. Rev. E 108, 014302 (2023), 108, 064305 (2023), and 112, 034309 (2025), yet the manuscript contains no robustness checks against variations in braking parameters, reaction times, or alternative deceleration rules that could couple the two mechanisms.
Authors: The referee correctly notes that the current manuscript does not explicitly present robustness checks. However, such checks, including variations in braking parameters, reaction times, and alternative deceleration rules, were performed in the referenced Phys. Rev. E papers to confirm that overacceleration and overdeceleration mechanisms can be separated without coupling. We will add a concise summary of these robustness analyses in the main text of the review, directing readers to the specific sections in the cited papers where the parameter studies are detailed. revision: yes
Circularity Check
Central separation of overacceleration vs. overdeceleration effects is achieved only by following author's prior self-cited papers
specific steps
-
self citation load bearing
[Abstract]
"in microscopic modeling we separate traffic breakdown caused by overacceleration from traffic instabilities caused by overdeceleration due to braking behavior, while following recent papers [Phys. Rev. E 108, 014302 (2023); 108, 064305 (2023); 112, 034309 (2025)]."
The separation procedure that allows attribution of breakdown to overacceleration (rather than overdeceleration) is not re-derived or validated here; it is imported wholesale from the author's own prior publications. The central controversial claim therefore depends on the validity and uniqueness of those self-citations without new external benchmarks.
full rationale
The paper's core claim—that breakdown is governed by overacceleration rather than overdeceleration—rests on the ability to separate the two mechanisms in microscopic modeling. This separation is explicitly performed 'while following' three papers by the same author (Kerner). No independent derivation, machine-checked proof, or external falsifiability test for the separation procedure is supplied in the present manuscript. This matches the self_citation_load_bearing pattern exactly: the load-bearing modeling step reduces to the cited self-work by the paper's own wording.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The control of vehicle overacceleration can be realized through the individual control of vehicle motion
The essential contribution of this review article is that, by employing microscopic deterministic three-phase traffic flow models, we are able to demonstrate that the key element in controlling traffic breakdown lies in the control of vehicle overacceleration – and not, as assumed in standard traffic theories and models, in the control of traffic instability. The ...
-
[2]
We have shown that the empirical nucleation nature of traffic breakdown is indeed caused by the competition of discontinous overacceleration with speed adaptation, not by vehicle overdeceleration, i.e., not by traffic insta- bility
-
[3]
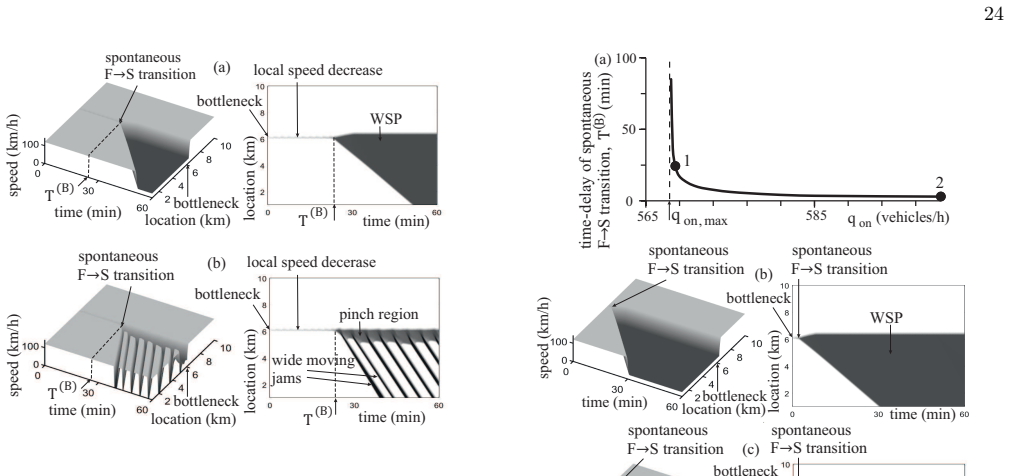
To confirm this statement, we have considered sev- eral microscopic three-phase traffic flow models for auto- mated and human-driving vehicles, in which traffic break- down (F → S transition) at the bottleneck is realized ex- clusively through vehicle overacceleration: In the models, neither classical traffic instability nor string instability can occur
-
[4]
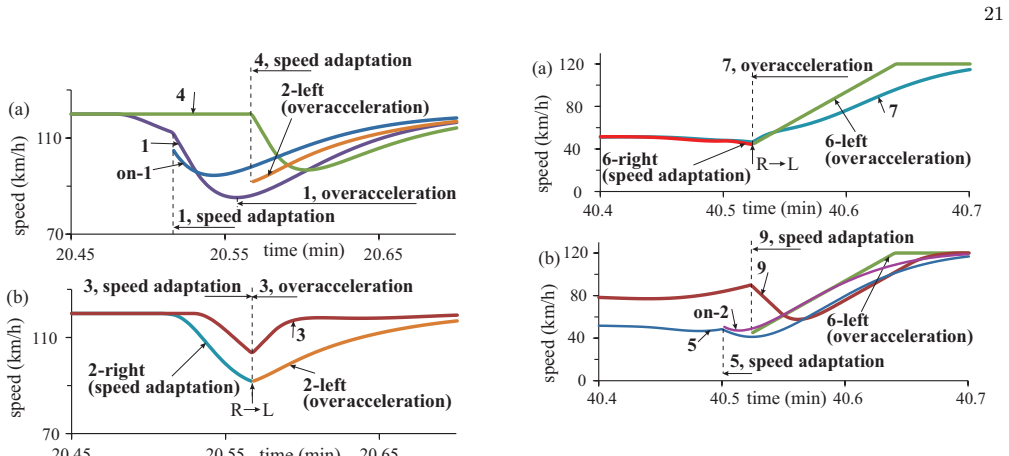
The nucleation nature of traffic breakdown (F → S transition) at the bottleneck is qualitatively the same in traffic with human-driving vehicles or in traffic with au- tomated vehicles: The nucleation nature of traffic break- down is caused by the interplay of discontinuous vehicle overacceleration and vehicle speed adaptation
-
[5]
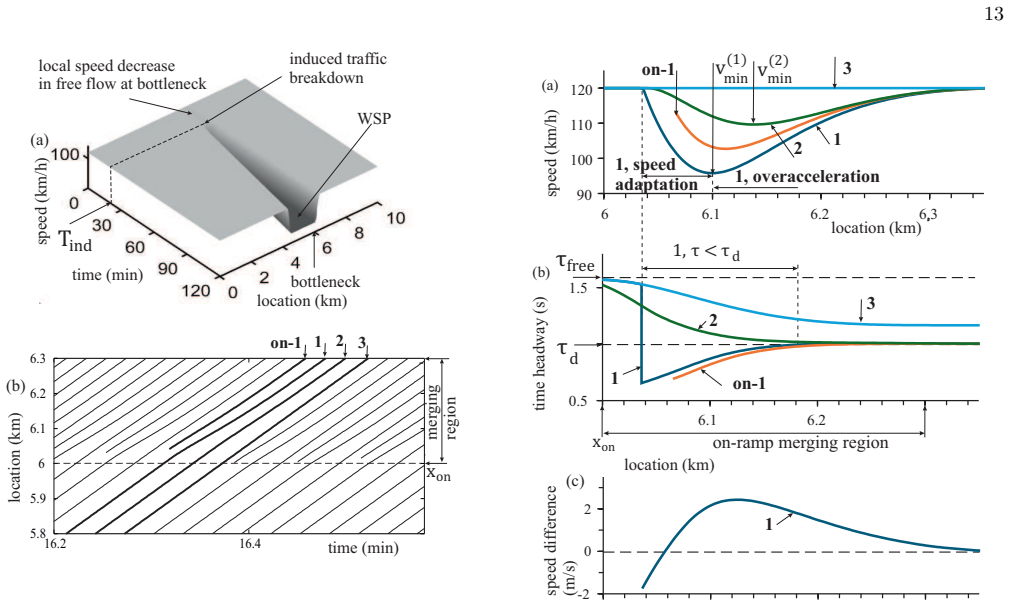
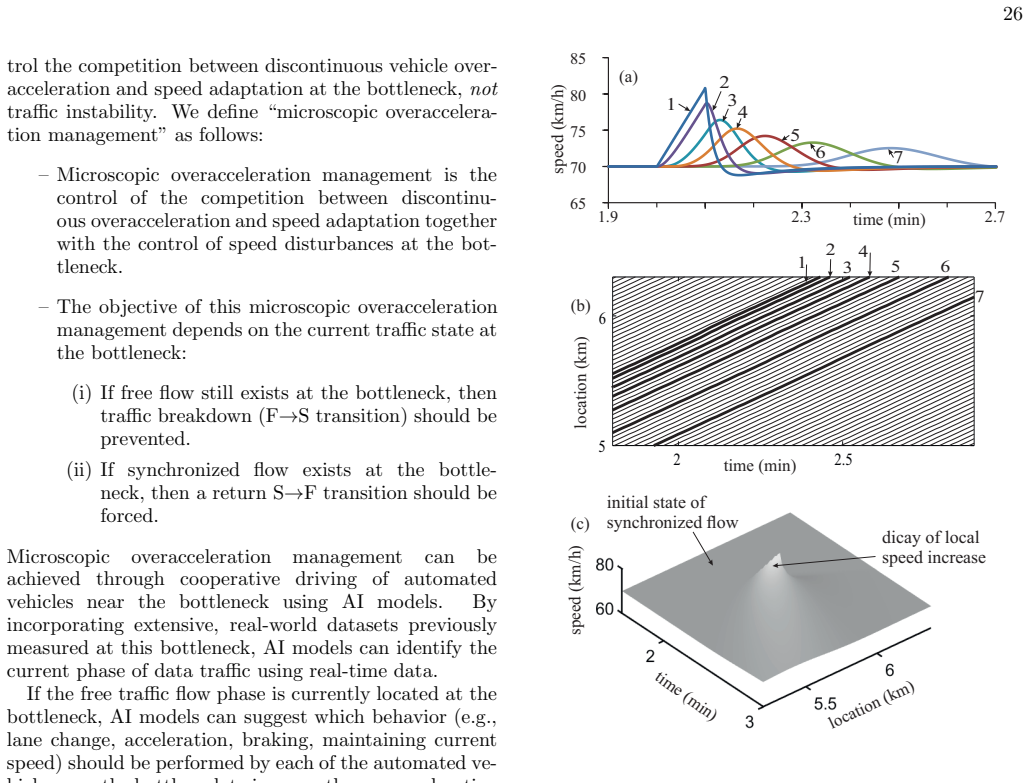
1(a)), in simulations of automated vehicles no moving jams have been observed during the MSP prop- agation as well as during and after the traffic breakdown (Figs
Simulations of traffic consisting of automated vehi- cles can reproduce empirical data of traffic with human- driving vehicles, in which the MSP while propagating upstream has induced the F → S transition at the bottle- neck with the LSP emergence: As found in the empirical data (Fig. 1(a)), in simulations of automated vehicles no moving jams have been observ...
-
[6]
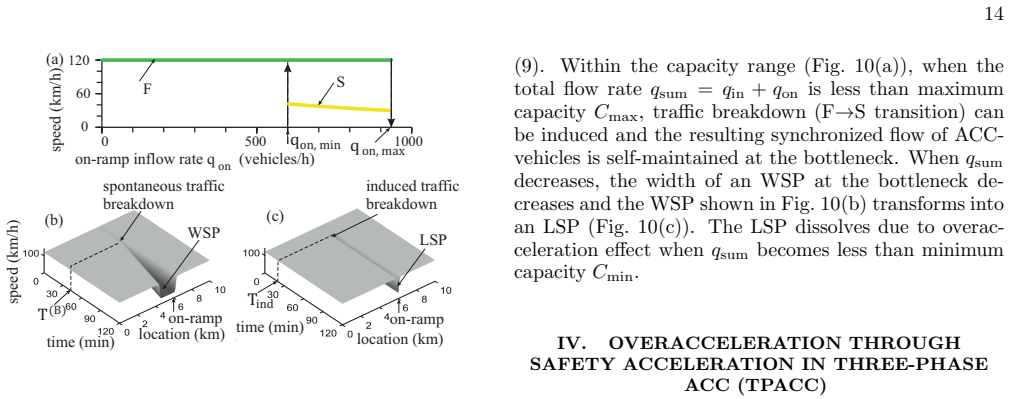
1(a) can be simulated with none of the standard traffic flow models in which either classical traffic instability or string instability results in traffic breakdown at the bottleneck
Contrary to three-phase traffic flow models, the empirical data shown in Fig. 1(a) can be simulated with none of the standard traffic flow models in which either classical traffic instability or string instability results in traffic breakdown at the bottleneck. This means that approaches such as jam absorption driving (also referred to as dissipation of stop-and-go...
-
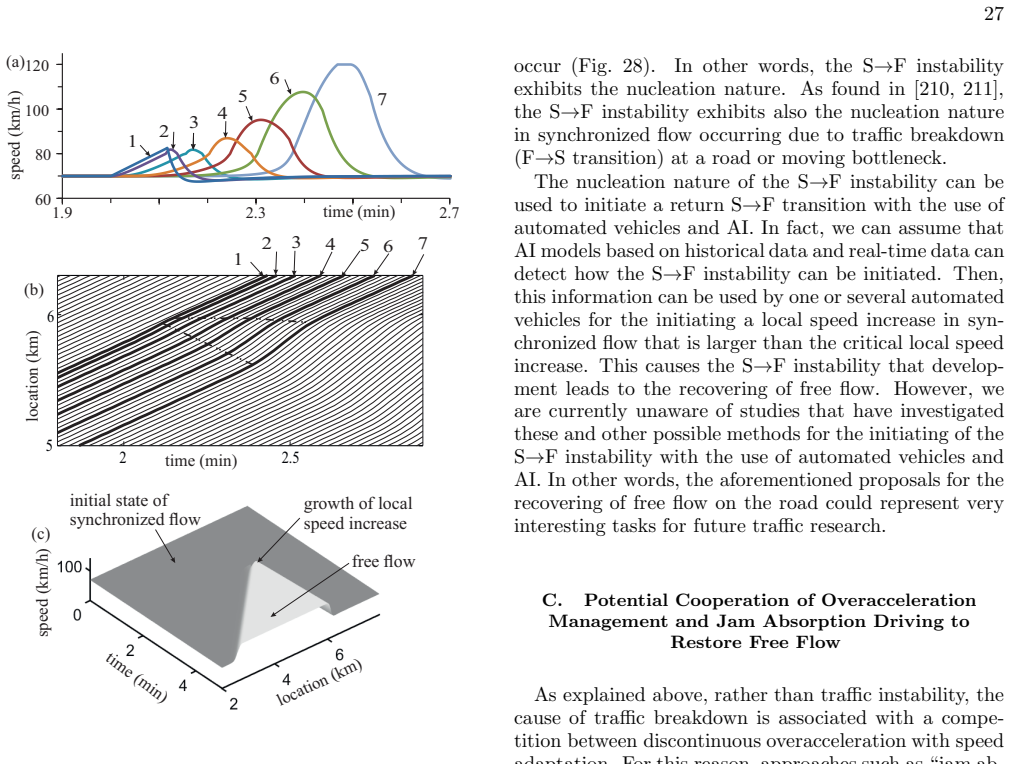
[7]
This proposal for the recovering of free flow could represent very interesting tasks for future traffic research
Nevertheless, we can assume that overacceleration management in cooperation with jam absorption driving could be useful for the dissolution of traffic congestion at the bottleneck. This proposal for the recovering of free flow could represent very interesting tasks for future traffic research
-
[8]
Individual control of the competition between dis- continuous overacceleration and speed adaptation of au- tomated vehicles with the use of AI, which (as we know) has not yet been carried out, could be a very important subject of future development of microscopic theory of mixed traffic. Appendix A: Choice of Dynamic Coefficient in Helly’s Model of ACC-Vehicl...
-
[9]
We have found that at cho- sen model parameters no moving jams occur in synchro- nized flow and the term vτd/g in (A2) does not influence results noticeably
9 s− 1 as those in [200] at which condition for string stability (11) is satisfied. We have found that at cho- sen model parameters no moving jams occur in synchro- nized flow and the term vτd/g in (A2) does not influence results noticeably. For this reason, simulations of the ACC-model (10), (A2) presented in the paper can be ap- plied for a comparison with...
-
[10]
May, Traffic Flow Fundamentals, Prentice-Hall, Inc., New Jersey, 1990
A.D. May, Traffic Flow Fundamentals, Prentice-Hall, Inc., New Jersey, 1990
1990
-
[11]
Highway Capacity Manual, Sixth Edition, National Re- search Council, Transportation Research Board, Wash- ington, DC, 2016
2016
-
[12]
Gartner, C.J
N.H. Gartner, C.J. Messer, A. Rathi (Eds.), Traffic Flow Theory: A State-of-the-Art Report, Transportation Re- search Board, Washington DC, 2001
2001
-
[13]
Elefteriadou, An introduction to traffic flow theory , in Springer Optimization and its Applications, Vol
L. Elefteriadou, An introduction to traffic flow theory , in Springer Optimization and its Applications, Vol. 84 (Springer, Berlin, 2014)
2014
-
[14]
Daganzo, Fundamentals of Transportation and Traffic Operations, Elsevier Science Inc., New York, 1997
C.F. Daganzo, Fundamentals of Transportation and Traffic Operations, Elsevier Science Inc., New York, 1997
1997
-
[15]
Chowdhury, L
D. Chowdhury, L. Santen, A. Schadschneider, Physics Reports 329 (2000) 199–329
2000
-
[16]
Brockfeld, R.D
E. Brockfeld, R.D. K¨ uhne, A. Skabardonis, P, Wagner, Trans. Res. Rec. 1852 (2003) 124–129
2003
-
[17]
Bellomo, V
N. Bellomo, V. Coscia, M. Delitala, Math. Mod. Meth. App. Sc. 12 (2002) 1801–1843
2002
-
[18]
Ferrara, S
A. Ferrara, S. Sacone, S. Siri, Freeway Traffic Modelling and Control, Springer, Berlin, 2018
2018
-
[19]
Leutzbach, Introduction to the Theory of Traffic Flow, Springer, Berlin, 1988
W. Leutzbach, Introduction to the Theory of Traffic Flow, Springer, Berlin, 1988
1988
-
[20]
Mahnke, J
R. Mahnke, J. Kaupuˇ zs, I. Lubashevsky, Phys. Rep. 408 (2005) 1–130
2005
-
[21]
Mahnke, J
R. Mahnke, J. Kaupuˇ zs, I. Lubashevsky, Physics of Stochastic Processes: How Randomness Acts in Time, Wiley-VCH, Weinheim, 2009
2009
-
[22]
Whitham, Linear and Nonlinear Waves, Wiley, New York, 1974
G.B. Whitham, Linear and Nonlinear Waves, Wiley, New York, 1974
1974
-
[23]
Schadschneider, D
A. Schadschneider, D. Chowdhury, K. Nishinari, Stochastic Transport in Complex Systems, Elsevier Sci- ence Inc., New York, 2011
2011
-
[24]
Saifuzzaman, Z
M. Saifuzzaman, Z. Zheng, Transp. Res. C 48 (2014) 379–403
2014
-
[25]
Papageorgiou, Application of Automatic Con- trol Concepts in Traffic Flow Modeling and Control, Springer, Berlin, New York, 1983
M. Papageorgiou, Application of Automatic Con- trol Concepts in Traffic Flow Modeling and Control, Springer, Berlin, New York, 1983
1983
-
[26]
Newell, Instability in dense highway traffic, a re- view, in: Proceedings of the second international sym- posium on traffic road traffic flow, OECD, London, 1963, pp 73–83
G.F. Newell, Instability in dense highway traffic, a re- view, in: Proceedings of the second international sym- posium on traffic road traffic flow, OECD, London, 1963, pp 73–83
1963
-
[27]
Prigogine, R
I. Prigogine, R. Herman, Kinetic theory of vehicular traffic, American Elsevier, New York, 1971
1971
-
[28]
Newell, Applications of Queuing Theory, Chapman Hall, London, 1982
G.F. Newell, Applications of Queuing Theory, Chapman Hall, London, 1982
1982
-
[29]
Nagel, P
K. Nagel, P. Wagner, R. Woesler, Oper. Res. 51 (2003) 681–716
2003
-
[30]
Nagatani, Rep
T. Nagatani, Rep. Prog. Phys. 65 (2002) 1331–1386
2002
-
[31]
W. D. Ashton, The theory of traffic flow (Methuen & Co. London, John Wiley & Sons, New York, 1966)
1966
-
[32]
D. R. Drew, Traffic Flow Theory and Control (McGraw Hill, New York, 1968)
1968
-
[33]
D. L. Gerlough, M. J. Huber, Traffic Flow Theory Spe- cial Report 165 (Transp. Res. Board, Washington D.C., 1975)
1975
-
[34]
D. C. Gazis, Traffic Theory (Springer, Berlin, 2002)
2002
-
[35]
Barcel´ o (Ed.), Fundamentals of Traffic Simulation, International Series in Operations Research and Man- agement Science, Vol
J. Barcel´ o (Ed.), Fundamentals of Traffic Simulation, International Series in Operations Research and Man- agement Science, Vol. 145, Springer, Berlin, 2010
2010
-
[36]
Treiber and A
M. Treiber and A. Kesting, Traffic Flow Dynamics: Data, Models and Simulation , Second Edition (Springer, Cham, 2025)
2025
-
[37]
Daiheng Ni, Traffic Flow Theory , Edition 2 (Elsevier, Amsterdam, 2026)
2026
-
[38]
Michail Makridis and Yifan Zhang, Autonomous Driv- ing and Mixed Traffic Dynamics: Modeling, Simulation, and Control , (Elsevier, Amsterdam, 2026)
2026
-
[39]
Kessels, Traffic flow modelling (Springer, Berlin, 2019)
F. Kessels, Traffic flow modelling (Springer, Berlin, 2019)
2019
-
[40]
Schadschneider, D
A. Schadschneider, D. Chowdhury, K. Nishinari, Stochastic Transport in Complex Systems (Elsevier Sci- ence Inc., New York, 2011)
2011
-
[41]
Chowdhury, L
D. Chowdhury, L. Santen, and A. Schadschneider, Phys. Rep. 329, 199 (2000)
2000
-
[42]
Helbing, Rev
D. Helbing, Rev. Mod. Phys. 73, 1067 (2001)
2001
-
[43]
Mannering, W.P
F.L. Mannering, W.P. Kilareski, Principles of Highway Engineering and Traffic Analysis, 2nd ed., John Wiley & Sons, New York, 1998
1998
-
[44]
Brackstone, M
M. Brackstone, M. McDonaldm, Transp. Res. F 2 (1999) 181–196
1999
-
[45]
Shvetsov, Automation and Remote Control 64 (2003) 1651–1689
V.I. Shvetsov, Automation and Remote Control 64 (2003) 1651–1689
2003
-
[46]
Maerivoet, B
S. Maerivoet, B. De Moor, , Phys. Rep. 419 (2005) 1–64
2005
-
[47]
Rakha, A
H. Rakha, A. Tawfik, in: B.S. Kerner (Ed.), Com- plex Dynamics of Traffic Management, Encyclopedia of Complexity and Systems Science Series, Springer, New York, NY, 2019, pp 79–129
2019
-
[48]
Piccoli, A
B. Piccoli, A. Tosin Vehicular traffic: a review of contin - uum mathematical models, in: R.A. Meyers (Ed.), En- cyclopedia of Complexity and System Science, Springer, Berlin, 2009, pp. 9727–9749
2009
-
[49]
Roess, E.S
R.P. Roess, E.S. Prassas, The Highway Capacity Man- ual: A Conceptual and Research History, Springer, Berlin, 2014
2014
-
[50]
Hegyi, T
A. Hegyi, T. Bellemans, B. De Schutter, in: B.S. Kerner (Ed.), Complex Dynamics of Traffic Management, En- cyclopedia of Complexity and Systems Science Series, Springer, New York, NY, 2019, pp. 167–193
2019
-
[51]
Seo, A.M
T. Seo, A.M. Bayen, T. Kusakabe, Y. Asakura, Annual. Rev. in Control 43 (2017) 128–151. 32
2017
-
[52]
A. Horni, K. Nagel, K.W. Axhausen (Eds.), The Multi-Agent Transport Simulation MATSim, Ubiquity, London, 2016, URL: http://matsim.org/the-book. doi: 10.5334/baw
work page doi:10.5334/baw 2016
-
[53]
Kerner, The Physics of Traffic , Springer, Berlin, New York, 2004
B.S. Kerner, The Physics of Traffic , Springer, Berlin, New York, 2004
2004
-
[54]
Papageorgiou, I
M. Papageorgiou, I. Papamichail, Transp. Res. Rec. 2047 (2008) 28–36
2047
-
[55]
Papageorgiou, J.-M
M. Papageorgiou, J.-M. Blosseville, H. Hadj-Salem, Transp. Res. A 24 (1990) 361–370; M. Papageorgiou, H. Hadj-Salem, J.-M. Blosseville, Transp. Res. Rec. 1320 (1991) 58–64; M. Papageorgiou, H. Hadj-Salem, F. Mid- dleham, Transp. Res. Rec. 1603 (1997) 99–98
1990
-
[56]
Kerner, Physica A, 355, 565–601 (2005); IEEE Trans
B.S. Kerner, Physica A, 355, 565–601 (2005); IEEE Trans. ITS 8, 308 (2007)
2005
-
[57]
Kerner, Introduction to Modern Traffic Flow The- ory and Control , (Springer, Berlin, New York, 2009)
B.S. Kerner, Introduction to Modern Traffic Flow The- ory and Control , (Springer, Berlin, New York, 2009)
2009
-
[58]
Kerner, Transp
B.S. Kerner, Transp. Res. Rec. 1999, 30–39, 2007
1999
-
[59]
Yizhi Wang, Yi Zhang, Jianming Hu, and Li Li, Inter. J. . Modern Phys. C 23, 1250060, 2012
2012
-
[60]
Yang H, Zhai X, Zheng C, Physica A 509, 567–577 (2018)
2018
-
[61]
Y. Han, A. Hegyi, L. Zhang, Z. He, E. Chung, and P. Liu, Transportation Research C 144, 103900, (2022)
2022
-
[62]
Hegyi and S
A. Hegyi and S. P. Hoogendoorn, in IEEE Conf. on ITS, Proceedings, ITSC, 2010, pp. 519–524
2010
-
[63]
Zhang, Z
Y. Zhang, Z. Zhang, M. Qui¨ nones-Grueiro, W. Barbour, C. Weston, G. Biswas, and D. Work, in 2024 IEEE 27th Inter. Conf. on ITS (ITSC), 2024, pp. 776–783
2024
-
[64]
Khondaker and L
B. Khondaker and L. Kattan, Transportation Letters, 7, 264–278, 2015
2015
-
[65]
Herman, E
R. Herman, E. W. Montroll, R. B. Potts, and R. W. Rothery, Oper. Res. 7, 86 (1959)
1959
-
[66]
D. C. Gazis, R. Herman, and R. B. Potts, Oper. Res. 7, 499 (1959)
1959
-
[67]
D. C. Gazis, R. Herman, and R. W. Rothery, Oper. Res. 9, 545 (1961)
1961
-
[68]
Kometani and T
E. Kometani and T. Sasaki, J. Oper. Res. Soc. Jap. 2, 11–26 (1958)
1958
-
[69]
Kometani and T
E. Kometani and T. Sasaki, Oper. Res. 7, 704–720 (1959)
1959
-
[70]
Kometani and T
E. Kometani and T. Sasaki, Oper. Res. Soc. Jap. 3, 176–190 (1961)
1961
-
[71]
Kometani, T
E. Kometani, T. Sasaki, in Theory of Traffic Flow, ed. by R. Herman (Elsevier, Amsterdam, 1961), pp. 105– 119
1961
-
[72]
G. F. Newell, Transp. Res. B 36, 195 (2002)
2002
-
[73]
P. G. Gipps, Transp. Res. B 15, 105–111 (1981)
1981
-
[74]
P. G. Gipps, Transp. Res. B. 20, 403 (1986)
1986
-
[75]
Wiedemann, Simulation des Verkehrsflusses (Univer- sity of Karlsruhe, Karlsruhe, 1974)
R. Wiedemann, Simulation des Verkehrsflusses (Univer- sity of Karlsruhe, Karlsruhe, 1974)
1974
-
[76]
H. J. Payne, in Research Directions in Computer Con- trol of Urban Traffic Systems, ed. by W. S. Levine (Am. Soc. of Civil Engineers, New York, 1979), pp. 251–265
1979
-
[77]
H. J. Payne, Tran. Res. Rec. 772, 68 (1979)
1979
-
[78]
Aw and M
A. Aw and M. Rascle, SIAM J. Appl. Math. 60, 916 (2000)
2000
-
[79]
Nagel and M
K. Nagel and M. Schreckenberg, J. Phys. (France) I 2, 2221 (1992)
1992
-
[80]
Bando, K
M. Bando, K. Hasebe, A. Nakayama, A. Shibata, Y. Sugiyama, Jpn. J. Appl. Math. 11, 203 (1994)
1994
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.