4D Radar Meets LiDAR and Camera: Cooperative Perception under Adverse Weather
Pith reviewed 2026-06-28 22:27 UTC · model grok-4.3
The pith
4D imaging radar integrated into cooperative perception maintains performance when LiDAR and cameras degrade in fog and rain.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
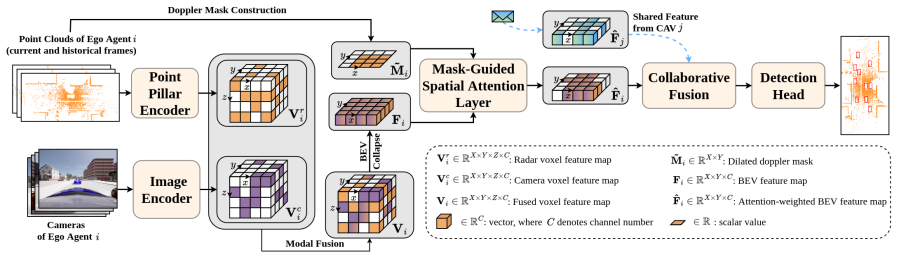
By extending radar-camera and LiDAR-radar pipelines with a Doppler-guided spatial attention mechanism for multi-agent fusion, 4D imaging radar delivers substantial robustness gains in fog and rain, including large improvements when it substitutes for degraded LiDAR, as validated on the released OPV2V-R and Adver-City-R benchmarks and on MAN TruckScenes.
What carries the argument
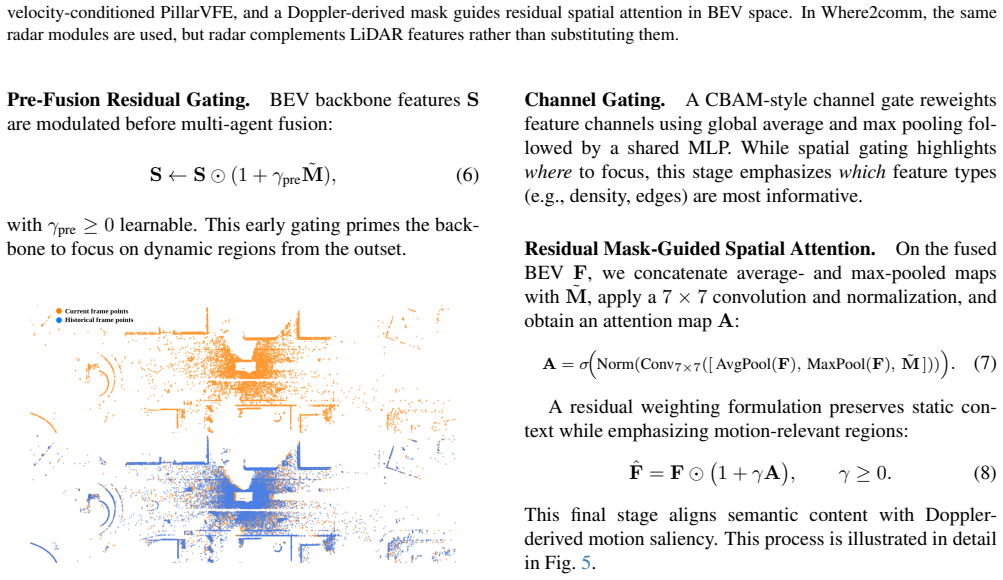
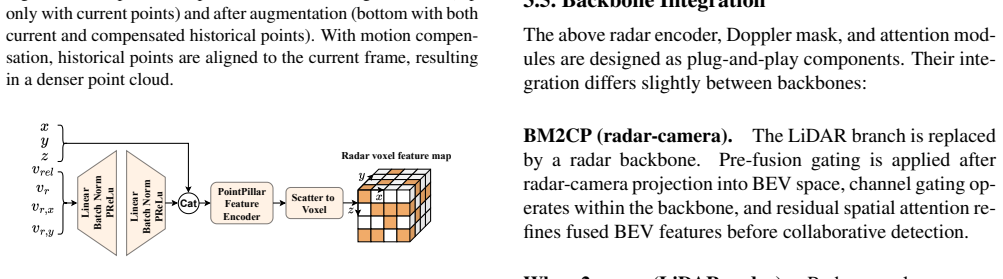
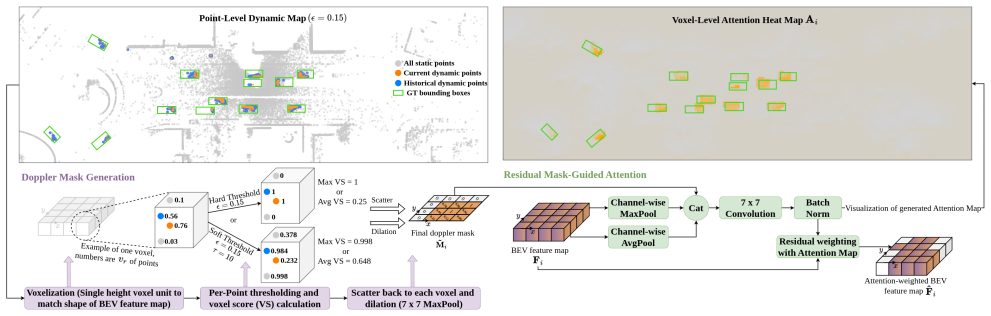
Doppler-guided spatial attention mechanism that performs multi-agent fusion by leveraging radar velocity information to weight spatial features across agents.
If this is right
- Radar-camera pipelines can maintain accuracy when LiDAR is fully unavailable due to weather.
- LiDAR-radar pipelines gain complementary coverage that offsets camera and LiDAR losses.
- The same fusion architecture transfers from simulation to recorded truck data.
- Collaborative perception no longer requires every agent to have perfectly functioning optical sensors.
Where Pith is reading between the lines
- Benchmark releases with controlled degradation could become standard for testing other weather-robust modalities.
- The Doppler attention idea might extend to single-agent fusion or to other velocity-capable sensors.
- Longer-term, fleets could reduce reliance on multiple high-cost LiDAR units if radar proves sufficient in mixed conditions.
Load-bearing premise
The physics-based LiDAR degradation model used to create the OPV2V-R and Adver-City-R benchmarks accurately captures how real LiDAR behaves in fog and rain.
What would settle it
Field tests in genuine fog or rain where replacing simulated-degraded LiDAR with real 4D radar produces no measurable detection improvement over the non-radar baseline.
Figures

read the original abstract
Cooperative perception is important for autonomous driving but remains fragile when cameras and LiDAR degrade in adverse weather. We address this challenge by integrating 4D imaging radar as a weather-robust modality into collaborative perception and introducing a Doppler-guided spatial attention mechanism for multi-agent fusion. Our approach extends two representative backbones: a radar-camera pipeline where radar substitutes LiDAR, and a LiDAR-radar pipeline where radar complements LiDAR. To support evaluation, we release radar-augmented benchmarks, OPV2V-R and Adver-City-R, with physics-based LiDAR degradation. Experiments show strong robustness gains in fog and rain, including substantial improvements when radar replaces degraded LiDAR. Additional validation on MAN TruckScenes demonstrates transfer beyond simulation. Overall, our results highlight 4D imaging radar as a robust modality for all-weather collaborative perception. Dataset and code are available at: https://url.fzi.de/SlimComm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that integrating 4D imaging radar into cooperative perception systems, via a Doppler-guided spatial attention mechanism for multi-agent fusion, yields strong robustness gains under fog and rain. It extends two backbones (radar-camera substitution and LiDAR-radar complement), releases physics-based LiDAR-degraded benchmarks OPV2V-R and Adver-City-R, reports experimental improvements on these benchmarks (including radar replacing degraded LiDAR), and shows transfer on real MAN TruckScenes data.
Significance. If the central claims hold, the work positions 4D imaging radar as a practical weather-robust modality for collaborative perception, directly addressing fragility of camera/LiDAR fusion in adverse conditions. The benchmark releases and code availability would support follow-on research.
major comments (1)
- [Abstract; benchmark release paragraph] Abstract and benchmark construction section: the headline robustness gains (including radar replacing degraded LiDAR) are demonstrated exclusively on OPV2V-R and Adver-City-R, which rely on an unvalidated physics-based LiDAR degradation model. No quantitative comparison of simulated point density, noise distribution, or intensity statistics against real adverse-weather LiDAR is provided, and the MAN TruckScenes experiment does not isolate or validate this model. This is load-bearing for the central empirical claim.
minor comments (1)
- [Abstract] The abstract reports only qualitative gains without any numerical values, error bars, or ablation summaries, which reduces immediate readability even though full results appear later.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the single major comment below and outline the planned revisions.
read point-by-point responses
-
Referee: [Abstract; benchmark release paragraph] Abstract and benchmark construction section: the headline robustness gains (including radar replacing degraded LiDAR) are demonstrated exclusively on OPV2V-R and Adver-City-R, which rely on an unvalidated physics-based LiDAR degradation model. No quantitative comparison of simulated point density, noise distribution, or intensity statistics against real adverse-weather LiDAR is provided, and the MAN TruckScenes experiment does not isolate or validate this model. This is load-bearing for the central empirical claim.
Authors: We agree that the manuscript does not contain a direct quantitative comparison (e.g., point-density histograms, noise statistics, or intensity distributions) between the physics-based degradation model and real adverse-weather LiDAR captures. The model follows established physical scattering principles previously used in the LiDAR simulation literature, but we did not perform or report such a side-by-side validation. The MAN TruckScenes experiment demonstrates transfer of the overall method to real adverse-weather data; however, it does not isolate or validate the specific degradation parameters used in the simulated benchmarks. We will revise the benchmark-construction section to provide additional implementation details of the degradation model and add an explicit limitations paragraph stating that the reported gains on OPV2V-R and Adver-City-R rest on simulation and that direct real-world statistical validation of the degradation model remains future work. This revision will be made in the next version of the manuscript. revision: yes
Circularity Check
No circularity: empirical results on released benchmarks with no derivation chain or fitted predictions.
full rationale
The paper reports experimental robustness gains on OPV2V-R and Adver-City-R benchmarks generated via a physics-based LiDAR degradation model, plus transfer on MAN TruckScenes. No equations, parameter fits, or predictions are described that reduce to inputs by construction. No self-citation load-bearing steps, uniqueness theorems, or ansatzes appear in the provided text. The central claims are direct empirical measurements on the introduced datasets and are therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Lang, Sourabh V ora, Venice Erin Liong, Qiang Xu, Anush Krishnan, Yuning Pan, Giancarlo Baldan, and Oscar Beijbom
Holger Caesar, Varun Bankiti, Alex H. Lang, Sourabh V ora, Venice Erin Liong, Qiang Xu, Anush Krishnan, Yuning Pan, Giancarlo Baldan, and Oscar Beijbom. nuscenes: A mul- timodal dataset for autonomous driving. InProceedings of 8 the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 11618–11628, 2020. 2
2020
-
[2]
CARLA: An open urban driving simulator
Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio Lopez, and Vladlen Koltun. CARLA: An open urban driving simulator. InProceedings of the 1st Annual Conference on Robot Learning, pages 1–16, 2017. 1, 5
2017
-
[3]
Man truckscenes: A multimodal dataset for autonomous trucking in diverse conditions, 2024
Felix Fent, Fabian Kuttenreich, Florian Ruch, Farija Rizwin, Stefan Juergens, Lorenz Lechermann, Christian Nissler, An- drea Perl, Ulrich V oll, Min Yan, and Markus Lienkamp. Man truckscenes: A multimodal dataset for autonomous trucking in diverse conditions, 2024. 2, 5, 8
2024
-
[4]
Ramp-cnn: A novel neural network for enhanced automo- tive radar object recognition.IEEE Sensors Journal, 21(4): 5119–5132, 2021
Xiangyu Gao, Guanbin Xing, Sumit Roy, and Hui Liu. Ramp-cnn: A novel neural network for enhanced automo- tive radar object recognition.IEEE Sensors Journal, 21(4): 5119–5132, 2021. 2
2021
-
[5]
Doppdrive: Doppler-driven temporal aggregation for improved radar object detection
Yuval Haitman and Oded Bialer. Doppdrive: Doppler-driven temporal aggregation for improved radar object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 26085–26094, 2025. 8
2025
-
[6]
Simple-bev: What really mat- ters for multi-sensor bev perception? In2023 IEEE Inter- national Conference on Robotics and Automation (ICRA), pages 2759–2765
Adam W Harley, Zhaoyuan Fang, Jie Li, Rares Ambrus, and Katerina Fragkiadaki. Simple-bev: What really mat- ters for multi-sensor bev perception? In2023 IEEE Inter- national Conference on Robotics and Automation (ICRA), pages 2759–2765. IEEE, 2023. 1
2023
-
[7]
Where2comm: Communication-efficient collab- orative perception via spatial confidence maps.Advances in neural information processing systems, 35:4874–4886,
Yue Hu, Shaoheng Fang, Zixing Lei, Yiqi Zhong, and Si- heng Chen. Where2comm: Communication-efficient collab- orative perception via spatial confidence maps.Advances in neural information processing systems, 35:4874–4886,
-
[8]
Nguyen, Mostafa Rahimi Azghadi, Yuxuan Xia, Qing-Long Han, and Sumei Sun
Tao Huang, Jianan Liu, Xi Zhou, Dinh C. Nguyen, Mostafa Rahimi Azghadi, Yuxuan Xia, Qing-Long Han, and Sumei Sun. V2x cooperative perception for autonomous driving: Recent advances and challenges, 2024. 1
2024
-
[9]
V2x-r: Cooperative lidar-4d radar fusion with denoising dif- fusion for 3d object detection
Xun Huang, Jinlong Wang, Qiming Xia, Siheng Chen, Bisheng Yang, Xin Li, Cheng Wang, and Chenglu Wen. V2x-r: Cooperative lidar-4d radar fusion with denoising dif- fusion for 3d object detection. In2025 IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition (CVPR), pages 27390–27400, 2025. 1, 2, 6, 7
2025
-
[10]
Weather- aware collaborative perception with uncertainty reduction
Ping Jiang, Xiaoheng Deng, Weishang Wu, Lixin Lin, Xuechen Chen, Chen Chen, and Shaohua Wan. Weather- aware collaborative perception with uncertainty reduction. IEEE Transactions on Intelligent Transportation Systems, 25 (12):20059–20072, 2024. 2
2024
-
[11]
Adver-city: Open-source multi-modal dataset for collaborative perception under ad- verse weather conditions, 2025
Mateus Karvat and Sidney Givigi. Adver-city: Open-source multi-modal dataset for collaborative perception under ad- verse weather conditions, 2025. 1, 2, 5
2025
-
[12]
Velat Kilic, Deepti Hegde, Vishwanath Sindagi, A Brinton Cooper, Mark A Foster, and Vishal M Patel. Lidar light scattering augmentation (lisa): Physics-based simulation of adverse weather conditions for 3d object detection.arXiv preprint arXiv:2107.07004, 2021. 1, 5
-
[13]
Craft: Camera-radar 3d object detection with spatio-contextual fusion transformer
Youngseok Kim, Sanmin Kim, Jun Won Choi, and Dong- suk Kum. Craft: Camera-radar 3d object detection with spatio-contextual fusion transformer. InProceedings of the AAAI Conference on Artificial Intelligence, pages 1160– 1168, 2023. 2
2023
-
[14]
Lang, Sourabh V ora, Holger Caesar, Lubing Zhou, Jiong Yang, and Oscar Beijbom
Alex H. Lang, Sourabh V ora, Holger Caesar, Lubing Zhou, Jiong Yang, and Oscar Beijbom. Pointpillars: Fast encoders for object detection from point clouds. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019. 8
2019
-
[15]
V2x-dgw: Domain generalization for multi-agent perception under ad- verse weather conditions, 2025
Baolu Li, Jinlong Li, Xinyu Liu, Runsheng Xu, Zhengzhong Tu, Jiacheng Guo, Xiaopeng Li, and Hongkai Yu. V2x-dgw: Domain generalization for multi-agent perception under ad- verse weather conditions, 2025. 2
2025
-
[16]
Autonomous vehicles: A critical review (2004-2024) and a vision for the future.Authorea Preprints, 2025
Henry Liu, Zhong Cao, Xintao Yan, Shuo Feng, and Qiujing Lu. Autonomous vehicles: A critical review (2004-2024) and a vision for the future.Authorea Preprints, 2025. 1
2004
-
[17]
Hongsi Liu, Jun Liu, Guangfeng Jiang, and Xin Jin. Mssf: A 4d radar and camera fusion framework with multi-stage sam- pling for 3d object detection in autonomous driving.IEEE Transactions on Intelligent Transportation Systems, 26(6): 8641–8656, 2025. 2
2025
-
[18]
A survey on autonomous driving datasets: Statistics, annotation quality, and a future outlook.IEEE Transactions on Intelligent Vehicles, 2024
Mingyu Liu, Ekim Yurtsever, Jonathan Fossaert, Xingcheng Zhou, Walter Zimmer, Yuning Cui, Bare Luka Zagar, and Alois C Knoll. A survey on autonomous driving datasets: Statistics, annotation quality, and a future outlook.IEEE Transactions on Intelligent Vehicles, 2024. 1
2024
-
[19]
Radarpillars: Efficient object detec- tion from 4d radar point clouds
Alexander Musiat, Laurenz Reichardt, Michael Schulze, and Oliver Wasenm¨uller. Radarpillars: Efficient object detec- tion from 4d radar point clouds. In2024 IEEE 27th Inter- national Conference on Intelligent Transportation Systems (ITSC), pages 1656–1663, 2024. 2, 3
2024
-
[20]
Centerfusion: Center-based radar and camera fusion for 3d object detection
Ramin Nabati and Hairong Qi. Centerfusion: Center-based radar and camera fusion for 3d object detection. InProceed- ings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), pages 1527–1536, 2021. 2
2021
-
[21]
A deep learning-based radar and camera sensor fusion architecture for object detec- tion
Felix Nobis, Maximilian Geisslinger, Markus Weber, Jo- hannes Betz, and Markus Lienkamp. A deep learning-based radar and camera sensor fusion architecture for object detec- tion. In2019 Symposium on Sensor Data Fusion: Trends, Solutions, Applications (SDF), pages 1–7, 2019. 2
2019
-
[22]
K-radar: 4d radar object detection for autonomous driving in various weather conditions.Advances in Neural Information Processing Systems, 35:3819–3829, 2022
Dong-Hee Paek, Seung-Hyun Kong, and Kevin Tirta Wijaya. K-radar: 4d radar object detection for autonomous driving in various weather conditions.Advances in Neural Information Processing Systems, 35:3819–3829, 2022. 2
2022
-
[23]
Andras Palffy, Ewoud Pool, Srimannarayana Baratam, Ju- lian F. P. Kooij, and Dariu M. Gavrila. Multi-class road user detection with 3+1d radar in the view-of-delft dataset.IEEE Robotics and Automation Letters, 7(2):4961–4968, 2022. 6
2022
-
[24]
4d mmwave radar for sensing enhancement in adverse environments: Advances and challenges, 2025
Xiangyuan Peng, Miao Tang, Huawei Sun, Kay Bierzyn- ski, Lorenzo Servadei, and Robert Wille. 4d mmwave radar for sensing enhancement in adverse environments: Advances and challenges, 2025. 1
2025
-
[25]
Adaptive feature fu- sion for cooperative perception using lidar point clouds
Donghao Qiao and Farhana Zulkernine. Adaptive feature fu- sion for cooperative perception using lidar point clouds. In Proceedings of the IEEE/CVF winter conference on applica- tions of computer vision, pages 1186–1195, 2023. 2, 6
2023
-
[26]
Scalability in perception for au- tonomous driving: Waymo open dataset, 2020
Pei Sun, Henrik Kretzschmar, Xerxes Dotiwalla, Aurelien Chouard, Vijaysai Patnaik, Paul Tsui, James Guo, Yin Zhou, Yuning Chai, Benjamin Caine, Vijay Vasudevan, Wei Han, Jiquan Ngiam, Hang Zhao, Aleksei Timofeev, Scott Ettinger, Maxim Krivokon, Amy Gao, Aditya Joshi, Sheng Zhao, 9 Shuyang Cheng, Yu Zhang, Jonathon Shlens, Zhifeng Chen, and Dragomir Anguel...
2020
-
[27]
Simulating realistic rain, snow, and fog varia- tions for comprehensive performance characterization of li- dar perception
Sven Teufel, Georg V olk, Alexander V on Bernuth, and Oliver Bringmann. Simulating realistic rain, snow, and fog varia- tions for comprehensive performance characterization of li- dar perception. In2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), pages 1–7, 2022. 2
2022
-
[28]
Per- ception for connected autonomous vehicles under adverse weather conditions
Dimitra Tsakmakopoulou and Konstantinos Moustakas. Per- ception for connected autonomous vehicles under adverse weather conditions. In2024 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), pages 3161– 3166, 2024. 2
2024
-
[29]
Perception methods for adverse weather based on vehicle infrastructure cooperation system: A re- view.Sensors, 24(2), 2024
Jizhao Wang, Zhizhou Wu, Yunyi Liang, Jinjun Tang, and Huimiao Chen. Perception methods for adverse weather based on vehicle infrastructure cooperation system: A re- view.Sensors, 24(2), 2024. 2
2024
-
[30]
Interfusion: Interaction-based 4d radar and lidar fusion for 3d object detection
Li Wang, Xinyu Zhang, Baowei Xv, Jinzhao Zhang, Rong Fu, Xiaoyu Wang, Lei Zhu, Haibing Ren, Pingping Lu, Jun Li, and Huaping Liu. Interfusion: Interaction-based 4d radar and lidar fusion for 3d object detection. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 12247–12253, 2022. 2
2022
-
[31]
Collaborative perception datasets for autonomous driv- ing: A review.IEEE Sensors Journal, 2025
Naibang Wang, Deyong Shang, Yan Gong, Xiaoxi Hu, Ziy- ing Song, Lei Yang, Yuhan Huang, Xiaoyu Wang, and Jianli Lu. Collaborative perception datasets for autonomous driv- ing: A review.IEEE Sensors Journal, 2025. 2
2025
-
[32]
Multi-sensor fusion in automated driving: A survey.IEEE Access, 8: 2847–2868, 2020
Zhangjing Wang, Yu Wu, and Qingqing Niu. Multi-sensor fusion in automated driving: A survey.IEEE Access, 8: 2847–2868, 2020. 1
2020
-
[33]
Foundation models for au- tonomous driving systems: An initial roadmap.ACM Trans- actions on Software Engineering and Methodology, 2026
Xiongfei Wu, Mingfei Cheng, Xiaoning Ren, Qiang Hu, Jianlang Chen, Yuheng Huang, Maxime Cordy, Yao Zhang, Xiaofei Xie, Lei Ma, et al. Foundation models for au- tonomous driving systems: An initial roadmap.ACM Trans- actions on Software Engineering and Methodology, 2026. 1
2026
-
[34]
Lxl: Lidar excluded lean 3d object detection with 4d imaging radar and camera fusion.IEEE Transactions on Intelligent Vehicles, 9(1):79–92, 2024
Weiyi Xiong, Jianan Liu, Tao Huang, Qing-Long Han, Yux- uan Xia, and Bing Zhu. Lxl: Lidar excluded lean 3d object detection with 4d imaging radar and camera fusion.IEEE Transactions on Intelligent Vehicles, 9(1):79–92, 2024. 2
2024
-
[35]
Opv2v: An open benchmark dataset and fusion pipeline for perception with vehicle-to-vehicle communica- tion
Runsheng Xu, Hao Xiang, Xin Xia, Xu Han, Jinlong Li, and Jiaqi Ma. Opv2v: An open benchmark dataset and fusion pipeline for perception with vehicle-to-vehicle communica- tion. In2022 International Conference on Robotics and Au- tomation (ICRA), pages 2583–2589. IEEE, 2022. 1, 2, 6
2022
-
[36]
Radarnet: Exploiting radar for robust per- ception of dynamic objects
Bin Yang, Runsheng Guo, Ming Liang, Sergio Casas, and Raquel Urtasun. Radarnet: Exploiting radar for robust per- ception of dynamic objects. InEuropean conference on com- puter vision, pages 496–512. Springer, 2020. 3
2020
-
[37]
A review of envi- ronmental perception technology based on multi-sensor in- formation fusion in autonomous driving.World Electric Ve- hicle Journal, 16(1), 2025
Boquan Yang, Jixiong Li, and Ting Zeng. A review of envi- ronmental perception technology based on multi-sensor in- formation fusion in autonomous driving.World Electric Ve- hicle Journal, 16(1), 2025. 1
2025
-
[38]
Spatio-temporal domain awareness for multi-agent collab- orative perception
Kun Yang, Dingkang Yang, Jingyu Zhang, Mingcheng Li, Yang Liu, Jing Liu, Hanqi Wang, Peng Sun, and Liang Song. Spatio-temporal domain awareness for multi-agent collab- orative perception. InProceedings of the IEEE/CVF In- ternational Conference on Computer Vision (ICCV), pages 23383–23392, 2023. 6
2023
-
[39]
V2x-radar: A multi-modal dataset with 4d radar for cooperative perception.Advances in Neural In- formation Processing Systems (NeurIPS), 2025
Lei Yang, Xinyu Zhang, Jun Li, Chen Wang, Jiaqi Ma, Zhiy- ing Song, Tong Zhao, Ziying Song, Li Wang, Mo Zhou, Yang Shen, and Chen Lv. V2x-radar: A multi-modal dataset with 4d radar for cooperative perception.Advances in Neural In- formation Processing Systems (NeurIPS), 2025. 2
2025
-
[40]
Radar-camera fusion for object detection and semantic segmentation in au- tonomous driving: A comprehensive review.IEEE Transac- tions on Intelligent Vehicles, 9(1):2094–2128, 2024
Shanliang Yao, Runwei Guan, Xiaoyu Huang, Zhuoxiao Li, Xiangyu Sha, Yong Yue, Eng Gee Lim, Hyungjoon Seo, Ka Lok Man, Xiaohui Zhu, and Yutao Yue. Radar-camera fusion for object detection and semantic segmentation in au- tonomous driving: A comprehensive review.IEEE Transac- tions on Intelligent Vehicles, 9(1):2094–2128, 2024. 1
2094
-
[41]
Mar- ius Z¨ollner
Melih Yazgan, Mythra Varun Akkanapragada, and J. Mar- ius Z¨ollner. Collaborative perception datasets in autonomous driving: A survey. In2024 IEEE Intelligent Vehicles Sympo- sium (IV), pages 2269–2276, 2024. 2
2024
-
[42]
Real-world problems in collaborative per- ception: A categorized review of intermediate fusion meth- ods.IEEE IV, 2024
Melih Yazgan, Thomas Graf, Min Liu, Tobias Fleck, and J Marius Z¨ollner. Real-world problems in collaborative per- ception: A categorized review of intermediate fusion meth- ods.IEEE IV, 2024. 1
2024
-
[43]
Slimcomm: Doppler-guided sparse queries for bandwidth-efficient cooperative 3-d perception
Melih Yazgan, Qiyuan Wu, Iramm Hamdard, Shiqi Li, and J Marius Zoellner. Slimcomm: Doppler-guided sparse queries for bandwidth-efficient cooperative 3-d perception. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 1782–1791, 2025. 2, 3, 6, 7
2025
-
[44]
Dair-v2x: A large-scale dataset for vehicle- infrastructure cooperative 3d object detection
Haibao Yu, Yizhen Luo, Mao Shu, Yiyi Huo, Zebang Yang, Yifeng Shi, Zhenglong Guo, Hanyu Li, Xing Hu, Jirui Yuan, and Zaiqing Nie. Dair-v2x: A large-scale dataset for vehicle- infrastructure cooperative 3d object detection. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21361–21370, 2022. 1, 2
2022
-
[45]
Perception and sensing for autonomous ve- hicles under adverse weather conditions: A survey.ISPRS Journal of Photogrammetry and Remote Sensing, 196:146– 177, 2023
Yuxiao Zhang, Alexander Carballo, Hanting Yang, and Kazuya Takeda. Perception and sensing for autonomous ve- hicles under adverse weather conditions: A survey.ISPRS Journal of Photogrammetry and Remote Sensing, 196:146– 177, 2023. 1, 2, 5
2023
-
[46]
Bm2cp: Effi- cient collaborative perception with lidar-camera modalities
Binyu Zhao, Wei ZHANG, and Zhaonian Zou. Bm2cp: Effi- cient collaborative perception with lidar-camera modalities. InConference on Robot Learning, pages 1022–1035. PMLR,
-
[47]
Rc- fusion: Fusing 4-d radar and camera with bird’s-eye view features for 3-d object detection.IEEE Transactions on In- strumentation and Measurement, 72:1–14, 2023
Lianqing Zheng, Sen Li, Bin Tan, Long Yang, Sihan Chen, Libo Huang, Jie Bai, Xichan Zhu, and Zhixiong Ma. Rc- fusion: Fusing 4-d radar and camera with bird’s-eye view features for 3-d object detection.IEEE Transactions on In- strumentation and Measurement, 72:1–14, 2023. 2
2023
-
[48]
Walter Zimmer, Gerhard Arya Wardana, Suren Sritharan, Xingcheng Zhou, Rui Song, and Alois C. Knoll. Tum- traf v2x cooperative perception dataset. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 22668–22677, 2024. 2 10
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.