A Koopman Set-Membership Approach for Nonlinear Data-Driven Control with Stability Guarantees
Pith reviewed 2026-06-28 16:15 UTC · model grok-4.3
The pith
A rational state-feedback controller designed via sum-of-squares stabilizes unknown nonlinear systems represented as bilinear Koopman models with set-membership uncertainty.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The nonlinear system is represented as a bilinear discrete-time system with a residual error term that is proportionally bounded by the norm of the lifted state and input. Unknown system matrices are characterized via a set-membership representation using collected input-state data pairs. A rational state-feedback controller is then designed by solving a sum-of-squares program to ensure stability for all bilinear systems inside this set and for all admissible residual errors, thereby guaranteeing stability of the original nonlinear system.
What carries the argument
Koopman bilinear realization with proportionally bounded residual error, combined with set-membership description of the unknown matrices and an SOS program that synthesizes a rational state-feedback law.
If this is right
- The closed-loop bilinear system remains stable for every matrix realization consistent with the data and every residual obeying the given bound.
- Stability of the bilinear closed loop directly implies stability of the underlying nonlinear system.
- Only input-state data pairs and the residual bound are required; no exact model parameters are needed.
- The controller takes the explicit form of a rational state-feedback law obtained from a single SOS program.
Where Pith is reading between the lines
- Collecting additional data after the initial design could be used to shrink the set-membership uncertainty and potentially recover a less conservative controller.
- The same set-membership plus SOS structure could be applied to other finite-dimensional lifted representations that admit bilinear or polynomial structure.
- The method could be tested on benchmark nonlinear systems with known analytic residuals to quantify how the size of the residual bound affects the resulting controller gain.
Load-bearing premise
Explicit bounds on the residual error are known and the residual is proportionally bounded by the norm of the lifted state and input.
What would settle it
A trajectory of the original nonlinear system that diverges under the designed controller while the corresponding lifted state-input pairs remain inside the residual bound and the set-membership description of the matrices.
Figures
read the original abstract
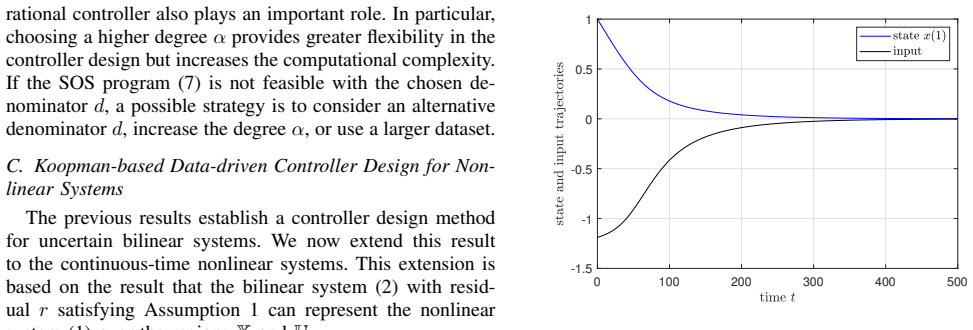
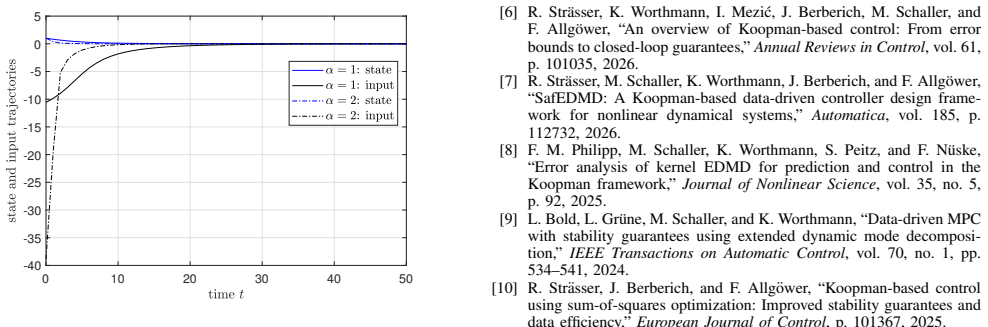
This paper proposes a data-driven controller design method for unknown nonlinear systems based on a Koopman bilinear realization. Using Koopman operator theory, the nonlinear system can be represented as a bilinear discrete-time system with a residual error term. The residual error is proportionally bounded by the norm of the lifted state and input, while the system matrices of the bilinear model are unknown. Assuming that bounds on the residual error are available, the unknown system matrices are characterized via a set-membership representation using the collected input-state data pairs of the nonlinear system. A data-driven controller design method is proposed to ensure stability for all bilinear systems within this set-membership description and for all admissible residual errors. More specifically, we design a rational state-feedback controller that stabilizes the bilinear model with residual error and, consequently, the original nonlinear system, by solving a sum-of-squares (SOS) program. The effectiveness of the proposed approach is demonstrated through numerical examples.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a data-driven method for designing stabilizing controllers for unknown nonlinear systems via a Koopman bilinear realization. The nonlinear dynamics are lifted to a bilinear discrete-time model with an additive residual error term that is assumed proportionally bounded by the norm of the lifted state and input. Unknown bilinear matrices are described by a set-membership representation derived from collected input-state data pairs. Assuming a priori bounds on the residual are known, a rational state-feedback controller is synthesized by solving an SOS program that certifies stability for every bilinear system inside the set-membership description and every admissible residual; the same controller is then claimed to stabilize the original nonlinear system. Numerical examples illustrate the approach.
Significance. If the central claim holds, the work supplies a route to certified robust controllers for nonlinear plants from data, combining Koopman lifting, set-membership uncertainty, and SOS-based synthesis of rational feedback. This is a meaningful contribution to data-driven control with formal guarantees, especially where stability certificates are required. The explicit handling of residual error inside the SOS program and the use of set-membership rather than point estimates are technical strengths.
major comments (2)
- [Abstract and modeling section] Abstract (Koopman bilinear realization paragraph) and the corresponding modeling section: the stability certificate for both the bilinear model and the original nonlinear system is predicated on the assumption that bounds on the residual error term are known a priori and that the error is proportionally bounded by ||lifted state + input||. No procedure, algorithm, or data-driven estimator is supplied to obtain, validate, or tighten these bounds from the collected input-state pairs; if the assumed bounds are invalid or overly conservative, the feasible set of the SOS program may certify a controller that fails to stabilize the true system.
- [Abstract and controller design section] The set-membership description of the bilinear matrices is constructed from data, but the residual bounds remain an external assumption. This creates an asymmetry: the matrix uncertainty is data-driven while the dominant modeling error (the residual) is not, which weakens the claim that the overall method is fully data-driven.
minor comments (2)
- Clarify the precise definition of the proportional residual bound (e.g., the constant multiplying the norm) and whether it is state-dependent or uniform.
- In the numerical examples, report the actual residual norms observed on validation trajectories to allow readers to assess how tight the assumed bounds were.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the residual error bounds and the data-driven aspects of the method. We address each major comment below, acknowledging the assumption on residual bounds and the resulting asymmetry. We will make partial revisions to clarify these points without adding new estimation procedures.
read point-by-point responses
-
Referee: [Abstract and modeling section] Abstract (Koopman bilinear realization paragraph) and the corresponding modeling section: the stability certificate for both the bilinear model and the original nonlinear system is predicated on the assumption that bounds on the residual error term are known a priori and that the error is proportionally bounded by ||lifted state + input||. No procedure, algorithm, or data-driven estimator is supplied to obtain, validate, or tighten these bounds from the collected input-state pairs; if the assumed bounds are invalid or overly conservative, the feasible set of the SOS program may certify a controller that fails to stabilize the true system.
Authors: We agree that the stability certificates rely on a priori known bounds on the residual, as explicitly stated in the abstract and modeling section. No data-driven estimator or validation procedure for these bounds is supplied in the manuscript because the contribution centers on set-membership uncertainty for the bilinear matrices and SOS synthesis of rational feedback given such bounds. In practice, bounds may be derived from domain knowledge, separate validation experiments, or conservative estimates; overly loose bounds can indeed render the SOS program conservative or infeasible. We will add a clarifying remark in the revised introduction and conclusions on this modeling assumption and its practical implications, but we do not claim a general estimator. revision: partial
-
Referee: [Abstract and controller design section] The set-membership description of the bilinear matrices is constructed from data, but the residual bounds remain an external assumption. This creates an asymmetry: the matrix uncertainty is data-driven while the dominant modeling error (the residual) is not, which weakens the claim that the overall method is fully data-driven.
Authors: The referee accurately notes the asymmetry. The set-membership representation of the bilinear matrices is constructed solely from the collected input-state data pairs, whereas residual bounds are introduced as an external modeling assumption. The manuscript does not assert that the method is fully data-driven with respect to all sources of uncertainty; the data-driven component is limited to the matrix set, with robustness to bounded residuals. We will revise the abstract and introduction to remove any potential overstatement of the data-driven scope and to explicitly distinguish the two uncertainty sources, aligning the presentation with standard robust control practice where disturbance bounds are often given a priori. revision: partial
Circularity Check
No significant circularity; derivation relies on external assumptions and standard SOS optimization
full rationale
The paper's central claim is a controller design procedure that takes collected input-state data pairs plus externally assumed bounds on the residual error term (proportionally bounded by ||lifted state + input||) and produces a rational state-feedback controller via an SOS program that certifies stability for the entire set-membership family. No equation in the abstract or described method reduces the stability certificate to a fitted parameter or renames an input quantity as a prediction. The residual bounds are stated as an assumption rather than derived inside the paper, and the SOS step is a standard semidefinite program applied to the set description; it does not create a self-definitional loop. Self-citations, if present, are not shown to be load-bearing for the uniqueness or correctness of the result. The method is therefore self-contained against its stated external inputs and benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The nonlinear system admits a bilinear discrete-time realization under the Koopman lift with residual error proportionally bounded by the norm of the lifted state and input.
Reference graph
Works this paper leans on
-
[1]
Isidori,Nonlinear control systems: an introduction
A. Isidori,Nonlinear control systems: an introduction. Springer, 1985
1985
-
[2]
P. A. Parrilo,Structured semidefinite programs and semialgebraic geometry methods in robustness and optimization. California Institute of Technology, 2000
2000
-
[3]
Nonlinear control syn- thesis by sum of squares optimization: A Lyapunov-based approach,
S. Prajna, A. Papachristodoulou, and F. Wu, “Nonlinear control syn- thesis by sum of squares optimization: A Lyapunov-based approach,” inIEEE 5th Asian control conference, 2004
2004
-
[4]
On the design of rational polynomial state feedback controllers,
M. Newton, Z. Xiong, H. Wang, and A. Papachristodoulou, “On the design of rational polynomial state feedback controllers,”arXiv preprint arXiv:2511.18988, 2025
-
[5]
Hamiltonian systems and transformation in Hilbert space,
B. O. Koopman, “Hamiltonian systems and transformation in Hilbert space,”Proceedings of the National Academy of Sciences, vol. 17, no. 5, pp. 315–318, 1931
1931
-
[6]
An overview of Koopman-based control: From error bounds to closed-loop guarantees,
R. Str ¨asser, K. Worthmann, I. Mezi ´c, J. Berberich, M. Schaller, and F. Allg ¨ower, “An overview of Koopman-based control: From error bounds to closed-loop guarantees,”Annual Reviews in Control, vol. 61, p. 101035, 2026
2026
-
[7]
SafEDMD: A Koopman-based data-driven controller design frame- work for nonlinear dynamical systems,
R. Str ¨asser, M. Schaller, K. Worthmann, J. Berberich, and F. Allg¨ower, “SafEDMD: A Koopman-based data-driven controller design frame- work for nonlinear dynamical systems,”Automatica, vol. 185, p. 112732, 2026
2026
-
[8]
Error analysis of kernel EDMD for prediction and control in the Koopman framework,
F. M. Philipp, M. Schaller, K. Worthmann, S. Peitz, and F. N ¨uske, “Error analysis of kernel EDMD for prediction and control in the Koopman framework,”Journal of Nonlinear Science, vol. 35, no. 5, p. 92, 2025
2025
-
[9]
Data-driven MPC with stability guarantees using extended dynamic mode decomposi- tion,
L. Bold, L. Gr ¨une, M. Schaller, and K. Worthmann, “Data-driven MPC with stability guarantees using extended dynamic mode decomposi- tion,”IEEE Transactions on Automatic Control, vol. 70, no. 1, pp. 534–541, 2024
2024
-
[10]
Koopman-based control using sum-of-squares optimization: Improved stability guarantees and data efficiency,
R. Str ¨asser, J. Berberich, and F. Allg ¨ower, “Koopman-based control using sum-of-squares optimization: Improved stability guarantees and data efficiency,”European Journal of Control, p. 101367, 2025
2025
-
[11]
A note on persistency of excitation,
J. C. Willems, P. Rapisarda, I. Markovsky, and B. L. De Moor, “A note on persistency of excitation,”Systems & Control Letters, vol. 54, no. 4, pp. 325–329, 2005
2005
-
[12]
Formulas for data-driven control: Stabi- lization, optimality, and robustness,
C. De Persis and P. Tesi, “Formulas for data-driven control: Stabi- lization, optimality, and robustness,”IEEE Transactions on Automatic Control, vol. 65, no. 3, pp. 909–924, 2019
2019
-
[13]
Linear tracking MPC for nonlinear systems—Part II: The data-driven case,
J. Berberich, J. K ¨ohler, M. A. M ¨uller, and F. Allg ¨ower, “Linear tracking MPC for nonlinear systems—Part II: The data-driven case,” IEEE Transactions on Automatic Control, vol. 67, no. 9, pp. 4406– 4421, 2022
2022
-
[14]
Willems’ fundamental lemma for nonlinear systems with Koopman linear embedding,
X. Shang, J. Cort ´es, and Y . Zheng, “Willems’ fundamental lemma for nonlinear systems with Koopman linear embedding,”IEEE Control Systems Letters, vol. 8, pp. 3135–3140, 2024
2024
-
[15]
Data-enabled predictive control for nonlinear sys- tems based on a Koopman bilinear realization,
Z. Xiong, Z. Yuan, K. Miao, H. Wang, J. Cort ´es, and A. Pa- pachristodoulou, “Data-enabled predictive control for nonlinear sys- tems based on a Koopman bilinear realization,” inIEEE 64th Confer- ence on Decision and Control (CDC), 2025, pp. 6498–6503
2025
-
[16]
Quadratic matrix inequalities with applications to data-based control,
H. J. van Waarde, M. K. Camlibel, J. Eising, and H. L. Trentelman, “Quadratic matrix inequalities with applications to data-based control,” SIAM Journal on Control and Optimization, vol. 61, no. 4, pp. 2251– 2281, 2023
2023
-
[17]
H. J. van Waarde, M. K. Camlibel, and H. L. Trentelman,Data-Based Linear Systems and Control Theory, 1st ed. Kindle Direct Publishing,
-
[18]
Available: https://henkvanwaarde.github.io/dblsct
[Online]. Available: https://henkvanwaarde.github.io/dblsct
-
[19]
Decoupling parameter variation from noise: Biquadratic Lyapunov forms in data-driven lpv control,
C. Verhoek, J. Eising, F. D ¨orfler, and R. T ´oth, “Decoupling parameter variation from noise: Biquadratic Lyapunov forms in data-driven lpv control,” inIEEE 63rd Conference on Decision and Control (CDC), 2024, pp. 6761–6766
2024
-
[20]
Data-driven inference on optimal input- output properties of polynomial systems with focus on nonlinearity measures,
T. Martin and F. Allg ¨ower, “Data-driven inference on optimal input- output properties of polynomial systems with focus on nonlinearity measures,”IEEE Transactions on Automatic Control, vol. 68, no. 5, pp. 2832–2847, 2023
2023
-
[21]
Data-driven stabilization of nonlinear polynomial systems with noisy data,
M. Guo, C. De Persis, and P. Tesi, “Data-driven stabilization of nonlinear polynomial systems with noisy data,”IEEE Transactions on Automatic Control, vol. 67, no. 8, pp. 4210–4217, 2021
2021
-
[22]
Bilinear data- driven min-max MPC: Designing rational controllers via sum-of- squares optimization,
Y . Xie, J. Berberich, R. Str ¨asser, and F. Allg ¨ower, “Bilinear data- driven min-max MPC: Designing rational controllers via sum-of- squares optimization,” inIEEE 64th Conference on Decision and Control (CDC), 2025, pp. 1042–1047
2025
-
[23]
Data-driven min–max MPC for linear systems: Robustness and adaptation,
Y . Xie, J. Berberich, and F. Allg ¨ower, “Data-driven min–max MPC for linear systems: Robustness and adaptation,”Automatica, vol. 183, p. 112612, 2026
2026
-
[24]
LMI-based data-driven robust model predictive control,
H. H. Nguyen, M. Friedel, and R. Findeisen, “LMI-based data-driven robust model predictive control,”IFAC-PapersOnLine, vol. 56, no. 2, pp. 4783–4788, 2023
2023
-
[25]
Trade-offs in learning controllers from noisy data,
A. Bisoffi, C. De Persis, and P. Tesi, “Trade-offs in learning controllers from noisy data,”Systems & Control Letters, vol. 154, p. 104985, 2021
2021
-
[26]
Control design and analysis for discrete time bilinear systems using sum of squares methods,
M. Vatani, M. Hovd, and S. Olaru, “Control design and analysis for discrete time bilinear systems using sum of squares methods,” inIEEE 53rd Conference on Decision and Control (CDC), 2014, pp. 3143– 3148
2014
-
[27]
C. W. Scherer and S. Weiland,Linear matrix inequalities in control, 3rd ed. New York : Spring-Verlag, 2000
2000
-
[28]
SOSTOOLS Version 4.00 Sum of Squares Optimization Toolbox for MATLAB
A. Papachristodoulou, J. Anderson, G. Valmorbida, S. Prajna, P. Seiler, and P. A. Parrilo,SOSTOOLS: Sum of squares optimization toolbox for MATLAB, arXiv:1310.4716, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[29]
The MOSEK optimization toolbox for MATLAB manual. version 10.1
M. Aps, “The MOSEK optimization toolbox for MATLAB manual. version 10.1.” 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.