Wheel-Mounted/GNSS Fusion with AI-Aided Position Updates
Pith reviewed 2026-06-28 09:57 UTC · model grok-4.3
The pith
A neural network regressing displacement from wheel-mounted inertial data during periodic trajectories cuts vehicle positioning RMSE by 46% when fused with GNSS in an error-state Kalman filter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that imposing periodic trajectories on a vehicle allows a simple neural network to regress displacement directly from wheel-mounted inertial sensor readings, and that feeding these regression outputs as updates into an error-state extended Kalman filter together with GNSS measurements produces approximately 46 percent lower position root mean squared error than standard wheel-mounted inertial sensor fusion with GNSS updates, as shown in multiple real-world experiments.
What carries the argument
Error-state extended Kalman filter that incorporates neural-network displacement regression from inertial data collected on enforced periodic trajectories, combined with GNSS position updates.
If this is right
- Displacement can be estimated from inertial data without additional sensors when periodic trajectories are used.
- Positioning accuracy improves measurably in real-world tests with multiple wheel-mounted sensors.
- The hybrid framework combines neural regression outputs directly with GNSS inside the error-state filter.
- The method applies to autonomous ground vehicle localization tasks.
Where Pith is reading between the lines
- The accuracy gain depends on the ability to enforce periodic motion in practice, which may restrict use in fully unstructured environments.
- Removing the periodic constraint would likely require retraining or redesigning the network to maintain the reported performance.
- The approach could be tested on other vehicle types or sensor placements to check how broadly the SNR boost from periodicity transfers.
Load-bearing premise
The neural network can reliably regress vehicle displacement from inertial readings alone when the vehicle follows enforced periodic trajectories, and that imposing such trajectories does not make the localization task unrealistic for actual use.
What would settle it
Running the same trained network on real trajectories that lack enforced periodicity and measuring whether the position RMSE improvement disappears or shrinks.
Figures

read the original abstract
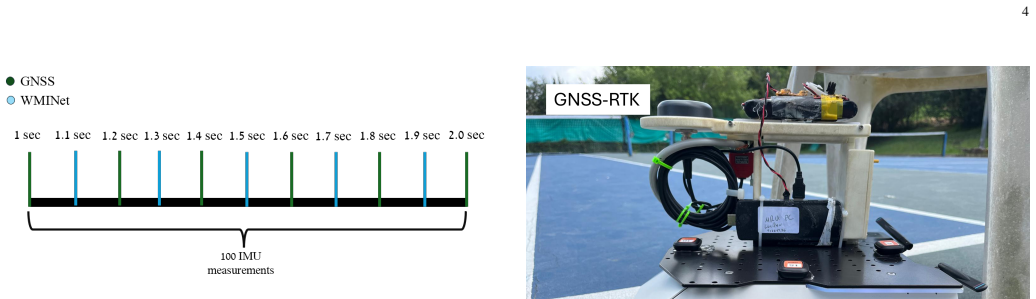
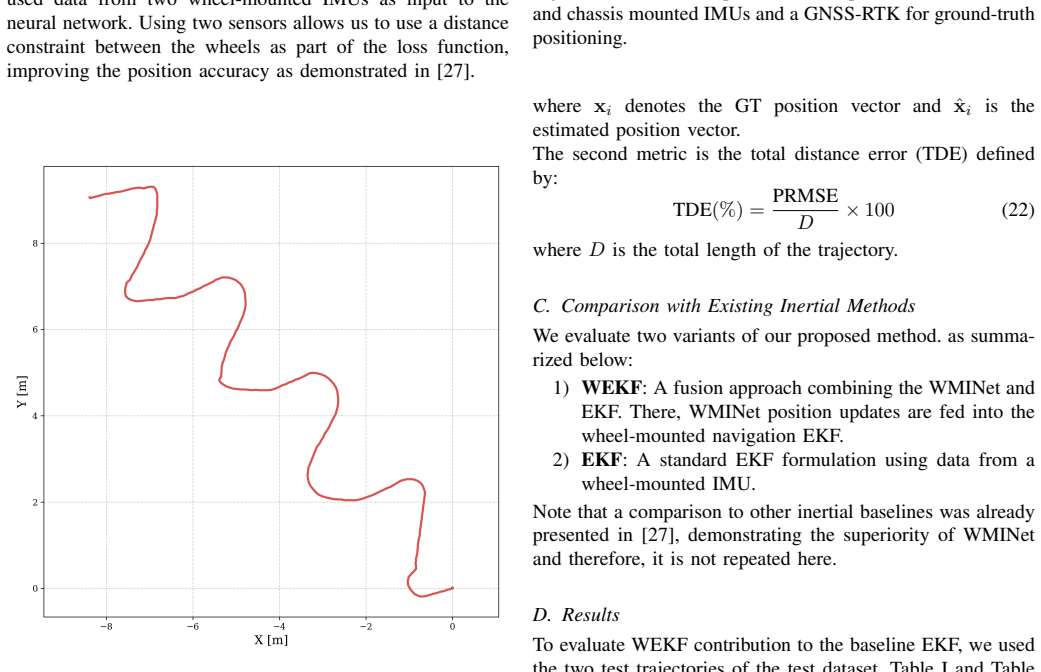
Accurate and robust localization remains a fundamental challenge for autonomous ground vehicles. In this work, we propose a hybrid neural inertial navigation framework that integrates a wheel-mounted inertial sensors, enforced periodic trajectories, and a simple, efficient neural network capable of regressing vehicle displacement with GNSS position updates in an error-state extended Kalman filter. The periodic trajectories increase the inertial signal-to-noise ratio, allowing the network to use only inertial readings to estimate displacement. The approach is validated through real-world experiments using multiple wheel-mounted inertial sensors. Experimental results demonstrate that the proposed method achieves a significant improvement in positioning accuracy, reducing the position root mean squared error by approximately 46 % compared to standard wheel-mounted inertial sensor fusion with GNSS updates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a hybrid neural inertial navigation framework that combines wheel-mounted inertial sensors, enforced periodic trajectories to boost inertial SNR, a neural network to regress vehicle displacement from inertial readings alone, and GNSS position updates within an error-state extended Kalman filter. Real-world experiments with multiple wheel-mounted sensors are claimed to demonstrate a 46% reduction in position RMSE relative to standard wheel-mounted inertial-GNSS fusion.
Significance. If the reported accuracy gain can be isolated to the neural-network displacement regression rather than the trajectory constraint, the framework could offer a lightweight, practical enhancement to inertial navigation for ground vehicles by exploiting periodic motion to enable inertial-only regression within a standard EKF pipeline.
major comments (2)
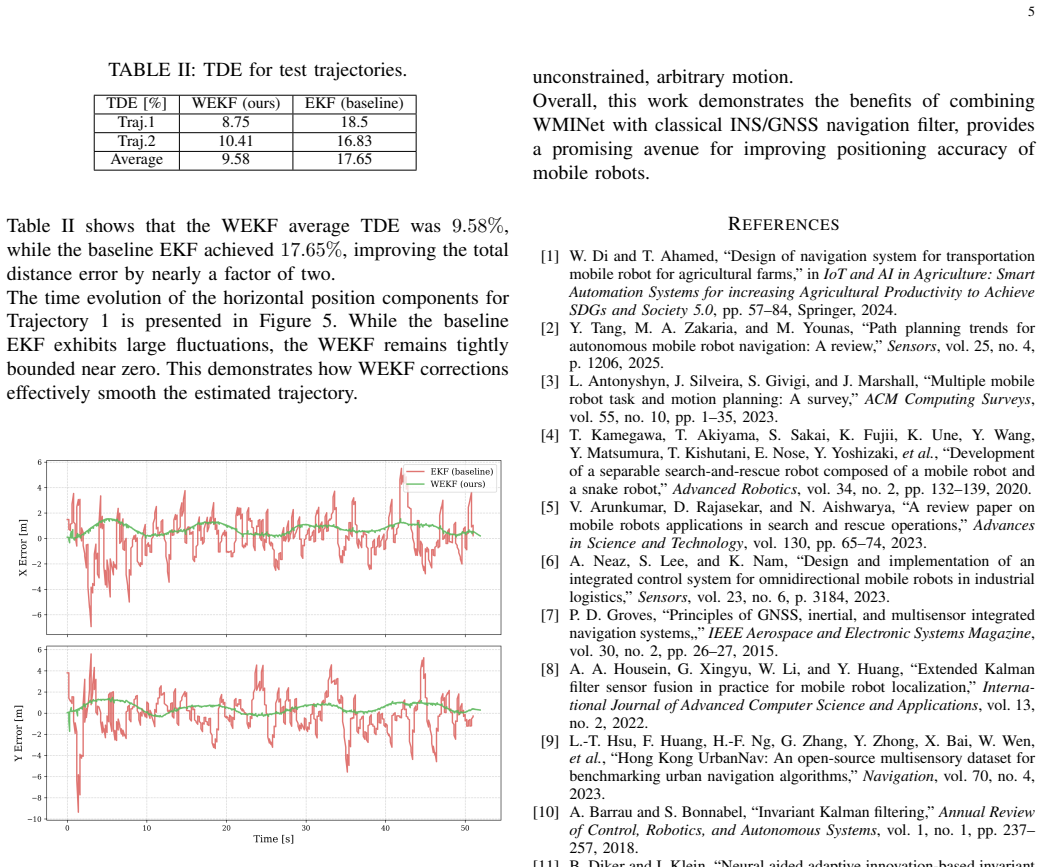
- [Abstract] Abstract: the 46% RMSE reduction is measured under enforced periodic trajectories (explicitly imposed to raise inertial SNR for the NN regression), yet the baseline is described only as 'standard wheel-mounted inertial sensor fusion with GNSS updates' without this constraint; the comparison therefore confounds the NN contribution with the effect of the artificial trajectory, leaving the central claim that the hybrid NN-EKF framework itself delivers the improvement unisolated.
- [Abstract] Abstract: the numerical claim of a 46% RMSE reduction is presented without error bars, dataset size or split details, baseline implementation description, number of trials, or any statistical significance test, rendering the result impossible to evaluate for reliability or reproducibility.
minor comments (1)
- [Abstract] Abstract: the neural network is characterized only as 'simple, efficient' with no mention of architecture, input features, training procedure, or loss, which would be needed for readers to assess or replicate the regression step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the 46% RMSE reduction is measured under enforced periodic trajectories (explicitly imposed to raise inertial SNR for the NN regression), yet the baseline is described only as 'standard wheel-mounted inertial sensor fusion with GNSS updates' without this constraint; the comparison therefore confounds the NN contribution with the effect of the artificial trajectory, leaving the central claim that the hybrid NN-EKF framework itself delivers the improvement unisolated.
Authors: The enforced periodic trajectories form an explicit and necessary element of the proposed hybrid framework, as they are required to raise inertial SNR sufficiently for the neural displacement regression to function. The baseline is the conventional wheel-mounted IMU-GNSS fusion without either the NN or the trajectory constraint. To better isolate the NN contribution, the revised manuscript will add comparative results under matched trajectory conditions (periodic vs. non-periodic) where data permit, clarifying the incremental benefit of the regression step. revision: partial
-
Referee: [Abstract] Abstract: the numerical claim of a 46% RMSE reduction is presented without error bars, dataset size or split details, baseline implementation description, number of trials, or any statistical significance test, rendering the result impossible to evaluate for reliability or reproducibility.
Authors: We agree that the abstract claim requires supporting statistical detail for proper assessment. The revised manuscript will expand both the abstract and the experimental results section to report error bars, dataset sizes and splits, a precise description of the baseline implementation, the number of trials, and the results of statistical significance testing. revision: yes
Circularity Check
No significant circularity; empirical validation stands independent of inputs
full rationale
The paper presents a hybrid method (wheel-mounted IMU + enforced periodic trajectories + NN displacement regression + EKF + GNSS) whose central claim is an experimentally measured 46% RMSE reduction. No equations, self-citations, or uniqueness theorems are invoked that would make any 'prediction' equivalent to a fitted parameter or prior result by construction. The NN regression is trained on data collected under the stated trajectory constraint and then evaluated on held-out real-world runs; this is standard supervised learning, not a self-definitional or fitted-input-called-prediction loop. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- Neural network parameters
axioms (1)
- standard math Error-state extended Kalman filter update equations remain valid when neural-network displacement estimates are inserted as measurements.
Reference graph
Works this paper leans on
-
[1]
Design of navigation system for transportation mobile robot for agricultural farms,
W. Di and T. Ahamed, “Design of navigation system for transportation mobile robot for agricultural farms,” inIoT and AI in Agriculture: Smart Automation Systems for increasing Agricultural Productivity to Achieve SDGs and Society 5.0, pp. 57–84, Springer, 2024
2024
-
[2]
Path planning trends for autonomous mobile robot navigation: A review,
Y . Tang, M. A. Zakaria, and M. Younas, “Path planning trends for autonomous mobile robot navigation: A review,”Sensors, vol. 25, no. 4, p. 1206, 2025
2025
-
[3]
Multiple mobile robot task and motion planning: A survey,
L. Antonyshyn, J. Silveira, S. Givigi, and J. Marshall, “Multiple mobile robot task and motion planning: A survey,”ACM Computing Surveys, vol. 55, no. 10, pp. 1–35, 2023
2023
-
[4]
Development of a separable search-and-rescue robot composed of a mobile robot and a snake robot,
T. Kamegawa, T. Akiyama, S. Sakai, K. Fujii, K. Une, Y . Wang, Y . Matsumura, T. Kishutani, E. Nose, Y . Yoshizaki,et al., “Development of a separable search-and-rescue robot composed of a mobile robot and a snake robot,”Advanced Robotics, vol. 34, no. 2, pp. 132–139, 2020
2020
-
[5]
A review paper on mobile robots applications in search and rescue operations,
V . Arunkumar, D. Rajasekar, and N. Aishwarya, “A review paper on mobile robots applications in search and rescue operations,”Advances in Science and Technology, vol. 130, pp. 65–74, 2023
2023
-
[6]
Design and implementation of an integrated control system for omnidirectional mobile robots in industrial logistics,
A. Neaz, S. Lee, and K. Nam, “Design and implementation of an integrated control system for omnidirectional mobile robots in industrial logistics,”Sensors, vol. 23, no. 6, p. 3184, 2023
2023
-
[7]
Principles of GNSS, inertial, and multisensor integrated navigation systems„
P. D. Groves, “Principles of GNSS, inertial, and multisensor integrated navigation systems„”IEEE Aerospace and Electronic Systems Magazine, vol. 30, no. 2, pp. 26–27, 2015
2015
-
[8]
Extended Kalman filter sensor fusion in practice for mobile robot localization,
A. A. Housein, G. Xingyu, W. Li, and Y . Huang, “Extended Kalman filter sensor fusion in practice for mobile robot localization,”Interna- tional Journal of Advanced Computer Science and Applications, vol. 13, no. 2, 2022
2022
-
[9]
Hong Kong UrbanNav: An open-source multisensory dataset for benchmarking urban navigation algorithms,
L.-T. Hsu, F. Huang, H.-F. Ng, G. Zhang, Y . Zhong, X. Bai, W. Wen, et al., “Hong Kong UrbanNav: An open-source multisensory dataset for benchmarking urban navigation algorithms,”Navigation, vol. 70, no. 4, 2023
2023
-
[10]
Invariant Kalman filtering,
A. Barrau and S. Bonnabel, “Invariant Kalman filtering,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, no. 1, pp. 237– 257, 2018
2018
-
[11]
Neural aided adaptive innovation-based invariant Kalman filter,
B. Diker and I. Klein, “Neural aided adaptive innovation-based invariant Kalman filter,”arXiv preprint arXiv:2603.26709, 2026
-
[12]
Invariant-EKF-based GNSS/INS/vision integration with high convergence and accuracy,
C. Xia, X. Li, S. Li, and Y . Zhou, “Invariant-EKF-based GNSS/INS/vision integration with high convergence and accuracy,” IEEE/ASME Transactions on Mechatronics, 2024
2024
-
[13]
A novel approach for aiding unscented kalman filter for bridging GNSS outages in integrated navigation sys- tems,
N. Al Bitar and A. Gavrilov, “A novel approach for aiding unscented kalman filter for bridging GNSS outages in integrated navigation sys- tems,”Navigation, vol. 68, no. 3, pp. 521–539, 2021
2021
-
[14]
Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration,
Y . Meng, S. Gao, Y . Zhong, G. Hu, and A. Subic, “Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration,”Acta Astronautica, vol. 120, pp. 171–181, 2016
2016
-
[15]
Adaptive neural unscented Kalman filter,
A. Levy and I. Klein, “Adaptive neural unscented Kalman filter,”IEEE Transactions on Intelligent Vehicles, 2026
2026
-
[16]
The INS/GPS integrated navigation based on autonomous underwater vehicle using modified extended Kalman filter,
Y . Hou, L. Cheng, Q. Wang, J. Li, and Y . Ke, “The INS/GPS integrated navigation based on autonomous underwater vehicle using modified extended Kalman filter,”Transactions of the Institute of Measurement and Control, vol. 48, no. 3, pp. 563–574, 2026
2026
-
[17]
Artificial neural networks for navigation systems: A review of recent research,
D.-J. Jwo, A. Biswal, and I. A. Mir, “Artificial neural networks for navigation systems: A review of recent research,”Applied Sciences, vol. 13, no. 7, p. 4475, 2023
2023
-
[18]
Exploring the poten- tial of the deep-learning-aided Kalman filter for GNSS/INS integration: A study on 2-D simulation datasets,
S. Li, M. Mikhaylov, T. Pany, and N. Mikhaylov, “Exploring the poten- tial of the deep-learning-aided Kalman filter for GNSS/INS integration: A study on 2-D simulation datasets,”IEEE Transactions on Aerospace and Electronic Systems, vol. 60, no. 3, pp. 2683–2691, 2023
2023
-
[19]
Deep learning assisted inertial dead reckoning and fusion,
D. Hurwitz, N. Cohen, and I. Klein, “Deep learning assisted inertial dead reckoning and fusion,”IEEE Transactions on Instrumentation and Measurement, 2024
2024
-
[20]
PiDR: Physics-Informed Inertial Dead Reckoning for Autonomous Platforms
A. K. Sahoo and I. Klein, “PiDR: Physics-informed inertial dead reckoning for autonomous platforms,”arXiv preprint arXiv:2601.03040, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[21]
Wheel-INS: A wheel-mounted MEMS IMU-based dead reckoning system,
X. Niu, Y . Wu, and J. Kuang, “Wheel-INS: A wheel-mounted MEMS IMU-based dead reckoning system,”IEEE Transactions on Vehicular Technology, vol. 70, no. 10, pp. 9814–9825, 2021. 6
2021
-
[22]
MEMS IMU carouseling for ground vehicles,
J. Collin, “MEMS IMU carouseling for ground vehicles,”IEEE Trans- actions on Vehicular Technology, vol. 64, no. 6, pp. 2242–2251, 2014
2014
-
[23]
A comparison of three measurement models for the wheel-mounted MEMS IMU-based dead reckoning system,
Y . Wu, X. Niu, and J. Kuang, “A comparison of three measurement models for the wheel-mounted MEMS IMU-based dead reckoning system,”IEEE Transactions on Vehicular Technology, vol. 70, no. 11, pp. 11193–11203, 2021
2021
-
[24]
Wheel-SLAM: Simultaneous localization and terrain mapping using one wheel-mounted IMU,
Y . Wu, J. Kuang, X. Niu, J. Behley, L. Klingbeil, and H. Kuhlmann, “Wheel-SLAM: Simultaneous localization and terrain mapping using one wheel-mounted IMU,”IEEE Robotics and Automation Letters, vol. 8, no. 1, pp. 280–287, 2023
2023
-
[25]
Wheel-mounted inertial datasets,
D. Nemec, G. Versano, V . Simak, M. Gregor, I. Savin, J. Kekelak, and I. Klein, “Wheel-mounted inertial datasets,”Scientific Data, 2025
2025
-
[26]
Pure inertial navigation in challenging environments with wheeled and chassis-mounted inertial sensors,
D. Nemec, G. Versano, I. Savin, V . Simak, J. Kekelak, and I. Klein, “Pure inertial navigation in challenging environments with wheeled and chassis-mounted inertial sensors,”IEEE Transactions on Instrumentation and Measurement, vol. 75, pp. 1–11, 2026
2026
-
[27]
WMInet: A wheel-mounted inertial learning approach for mobile-robot positioning,
G. Versano and I. Klein, “WMInet: A wheel-mounted inertial learning approach for mobile-robot positioning,”IEEE Sensors Journal, 2026
2026
-
[28]
Deep Learning using Rectified Linear Units (ReLU)
A. F. Agarap, “Deep learning using rectified linear units ReLU,”arXiv preprint arXiv:1803.08375, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[29]
Goodfellow,Deep learning, vol
I. Goodfellow,Deep learning, vol. 196. MIT press, 2016
2016
-
[30]
Bar-Shalom, P
Y . Bar-Shalom, P. K. Willett, and X. Tian,Tracking and data fusion, vol. 11. YBS publishing Storrs, CT, USA:, 2011
2011
-
[31]
J. A. Farrell,Aided navigation: GPS with high rate sensors. McGraw- Hill, Inc., 2008
2008
-
[32]
Rosbot XL manual
Husarion, “Rosbot XL manual.” Available at: https://husarion.com/ manuals/rosbot-xl/, 2024
2024
-
[33]
Movella DOT - wearable IMU sensor
Movella, “Movella DOT - wearable IMU sensor.” Available at: https: //www.movella.com/products/wearables/movella-dot, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.