Cooperative Circumnavigation for Multiple Unmanned Surface Vehicles Without External Localization
Pith reviewed 2026-06-28 06:25 UTC · model grok-4.3
The pith
Multiple USVs maintain circular formation around a target using only onboard sensors by making relative motions persistently exciting for their Kalman filters.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The coupled oscillator-based formation controller ensures that the relative motions between the USVs, as well as between each USV and the target, satisfy the persistent excitation condition, thereby guaranteeing observability of the Maximum Correntropy Kalman Filter and the Pseudo-Linear Kalman Filter used for position estimation.
What carries the argument
Coupled oscillator-based formation controller that enforces the persistent excitation condition on relative motions to guarantee observability of the two Kalman filters.
If this is right
- The USVs achieve and hold a uniform circular formation of any chosen radius around the target.
- Relative positions among the vehicles and to the target are estimated continuously by the respective Kalman filters.
- The entire system functions without external localization infrastructure.
- Numerical simulations confirm that the controller simultaneously achieves the formation and keeps the filters observable.
Where Pith is reading between the lines
- The same motion-design principle could be tested on other vehicle types that must circle a target with limited sensors.
- If the persistent-excitation guarantee holds over long durations, estimation drift would remain bounded without external corrections.
- The separation of active inter-vehicle sensing from passive target sensing may simplify hardware requirements in other multi-agent formation tasks.
Load-bearing premise
The heterogeneous perception strategy supplies enough relative-range, displacement, and bearing measurements for the chosen Kalman filters to produce usable position estimates.
What would settle it
A run in which the USVs' relative trajectories are altered so the persistent-excitation condition is violated and the position estimates from either filter diverge or become unbounded.
Figures

read the original abstract
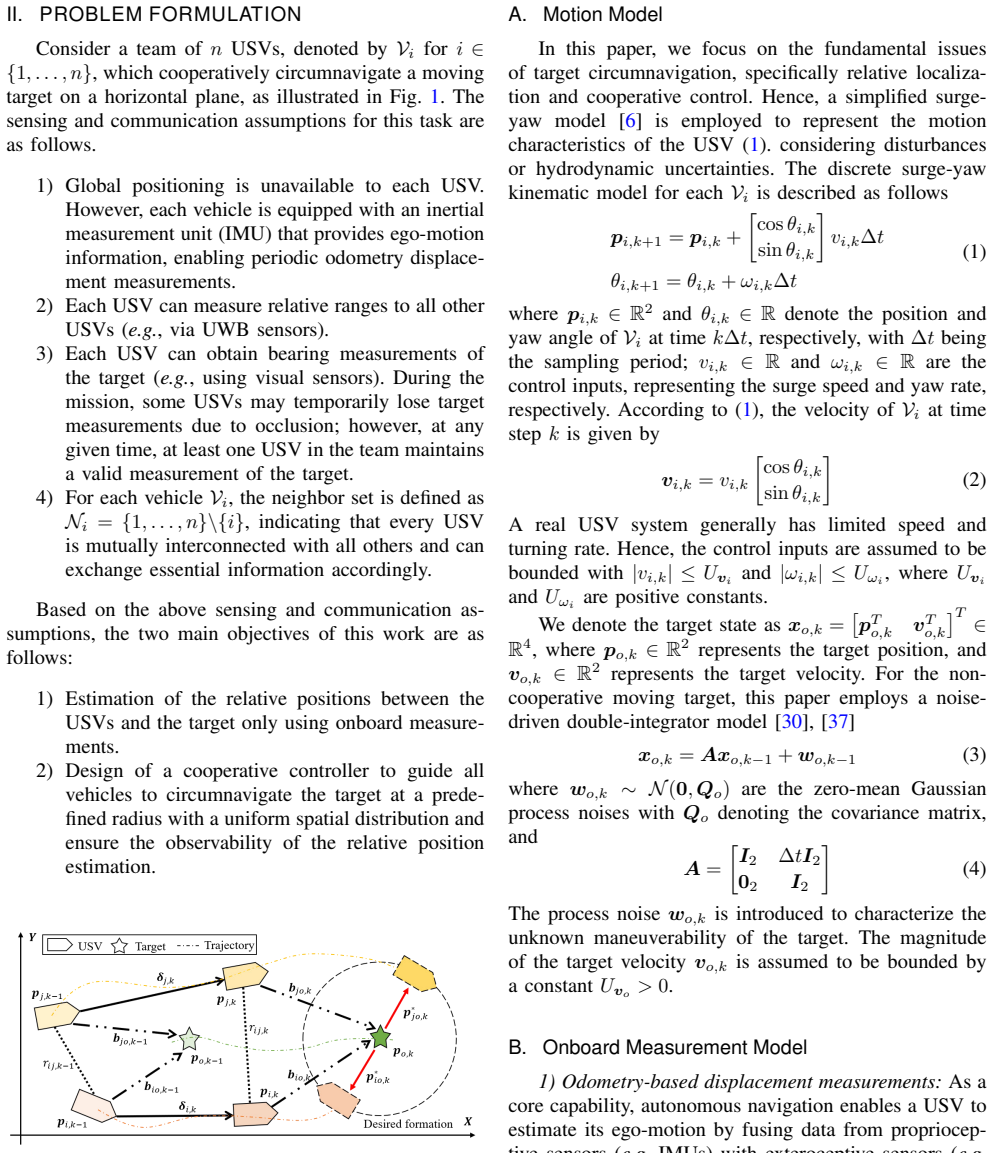
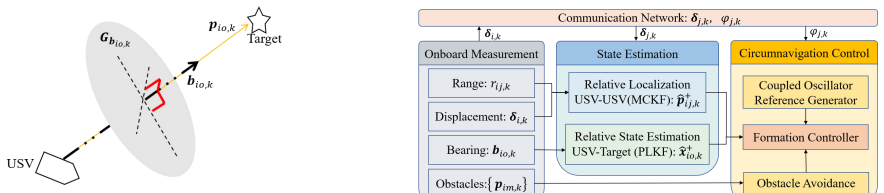
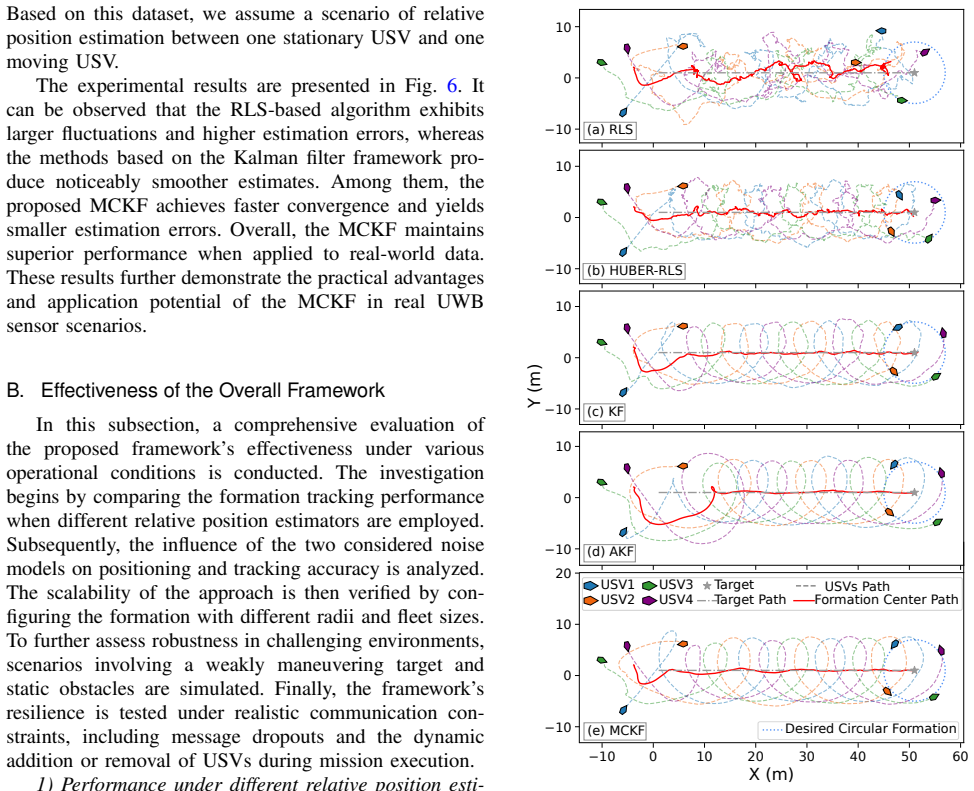
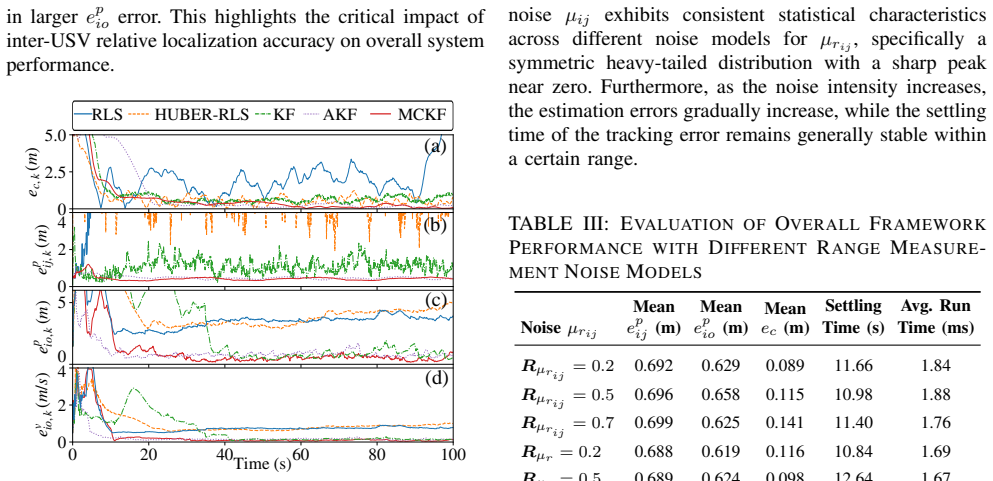
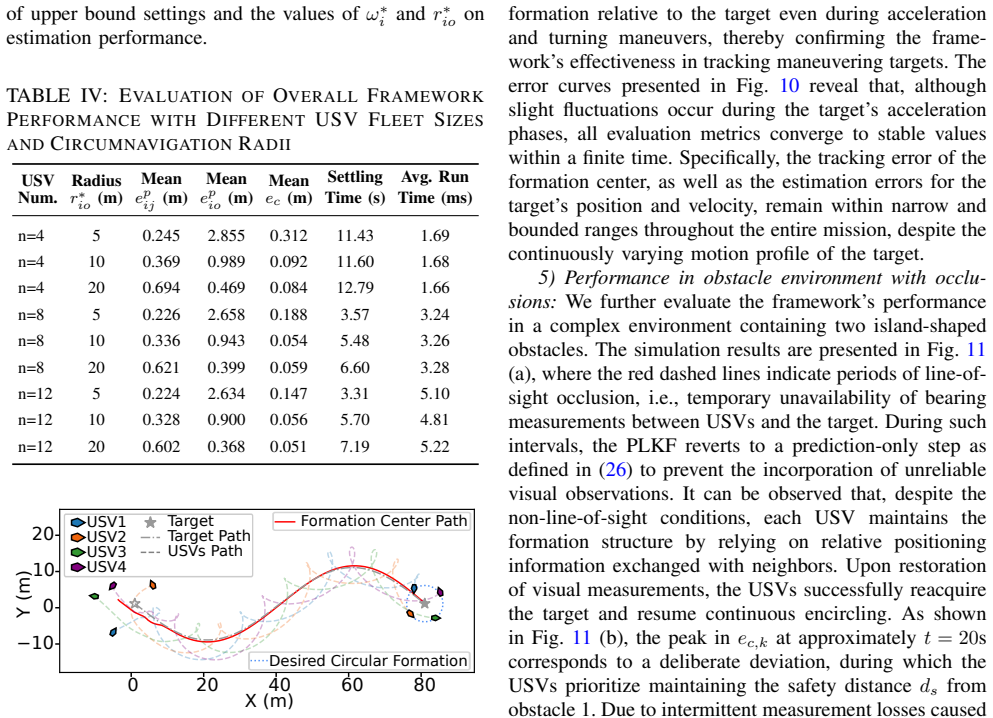
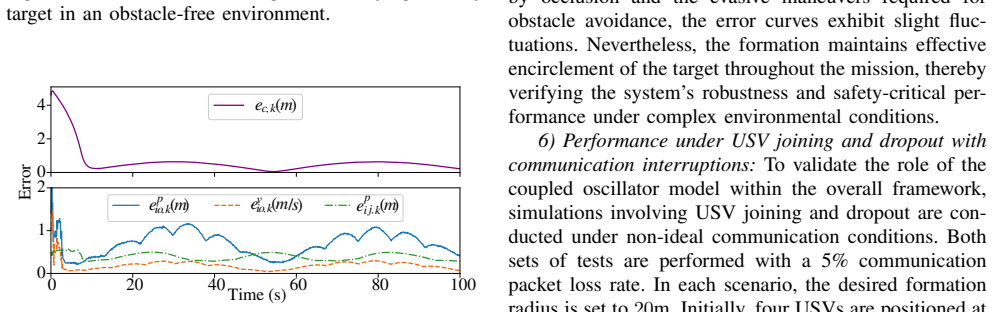
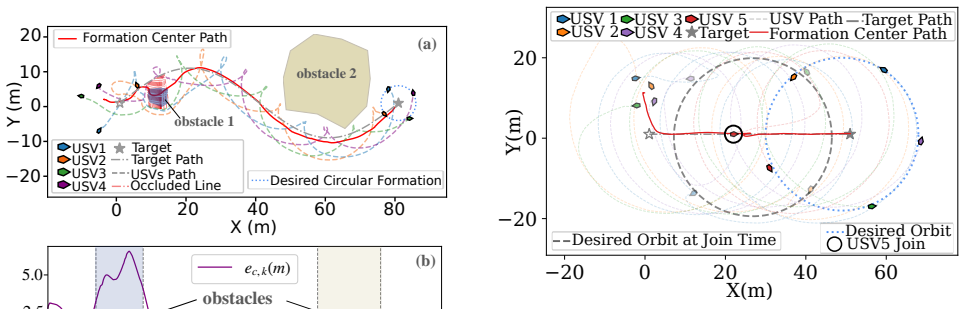
This paper proposes a cooperative target circumnavigation framework for multiple unmanned surface vehicles (USVs) operating without external localization. The objective is to maintain a uniform circular formation of a specified radius around a target using only limited onboard sensing. The framework adopts a heterogeneous perception strategy that distinguishes between the asymmetric sensing relationships with the target and among the USVs. Specifically, the USVs obtain relative range and displacement measurements through active perception and inter-vehicle communication, while bearing measurements to a non-cooperative target are acquired via passive sensors. To estimate relative positions--both among USVs and between each USV and the target--we employ a Maximum Correntropy Kalman Filter and a Pseudo-Linear Kalman Filter, respectively. A coupled oscillator-based formation controller is designed to ensure system observability while achieving circumnavigation. Theoretical analysis demonstrates that the controller ensures the relative motions between the USVs, as well as that between each USV and the target, satisfy the persistent excitation condition, thereby guaranteeing observability of the Kalman-based filters. The effectiveness of the proposed approach is validated through numerical simulations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a cooperative circumnavigation framework for multiple USVs without external localization. It uses heterogeneous perception (active range/displacement among USVs via comms, passive bearing to target), MCKF for USV-USV relative position estimation, PLKF for USV-target estimation, and a coupled oscillator controller designed to induce persistent excitation (PE) in relative motions to guarantee observability of the filters. Effectiveness is shown via numerical simulations and theoretical analysis claiming controller-induced PE ensures filter observability.
Significance. If the PE guarantees transfer rigorously to the modified filters (accounting for correntropy in MCKF and linearization in PLKF), the work would offer a useful contribution to decentralized marine robotics by tightly coupling formation control with estimation observability in GPS-denied settings. The heterogeneous sensing and oscillator-based design are practical strengths, though the result's impact depends on closing the gap between standard linear PE theory and the specific nonlinear filter properties.
major comments (2)
- [Theoretical analysis] Theoretical analysis section: The claim that the coupled oscillator controller ensures relative motions satisfy the PE condition (thereby guaranteeing observability of MCKF and PLKF) invokes standard results for linear time-varying systems, but does not re-derive the excitation condition or observability Gramian under the correntropy-based cost in MCKF (which alters the information matrix) or the pseudo-linear approximation in PLKF (which introduces linearization error). This leaves the central observability guarantee unverified for the actual filters used.
- [Controller design] Controller design and observability proof: The design couples the oscillator dynamics to relative motions to enforce PE, but the manuscript does not explicitly address whether this creates circularity (i.e., the controller assumes the excitation it must induce) or whether the resulting trajectories satisfy the filter-specific persistence conditions required for MCKF convergence and PLKF bias analysis.
minor comments (2)
- Notation for the heterogeneous measurements (range, displacement, bearing) should be unified across the estimation and control sections to avoid ambiguity in the observability analysis.
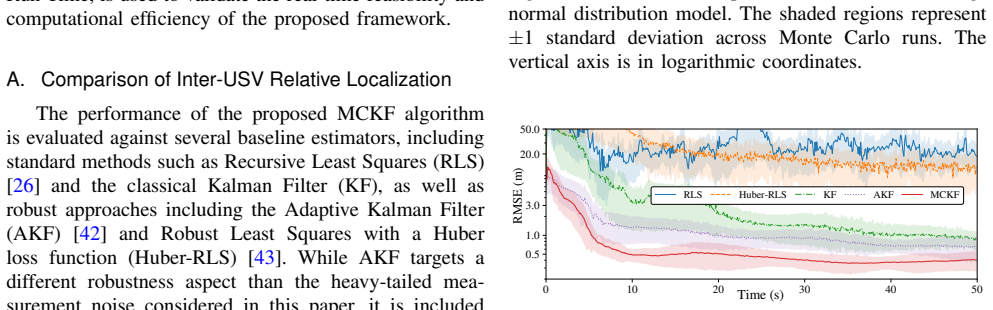
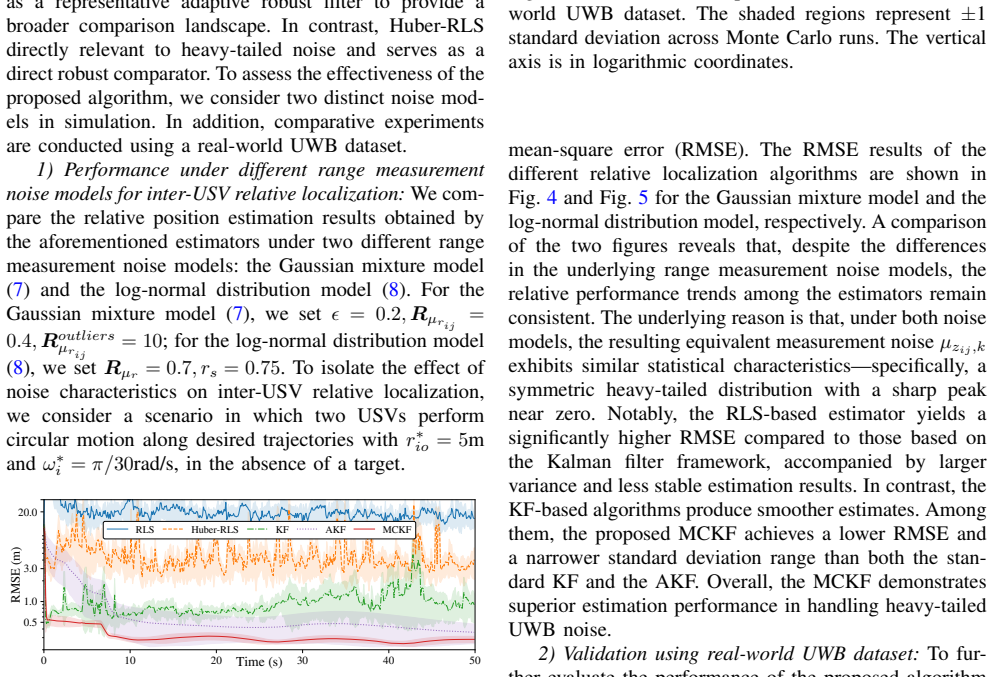
- [Numerical simulations] Simulation section: Include quantitative metrics (e.g., estimation RMSE, formation error) comparing against a baseline without the PE-inducing controller to strengthen the validation.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the theoretical analysis and controller design. We provide point-by-point responses below.
read point-by-point responses
-
Referee: [Theoretical analysis] Theoretical analysis section: The claim that the coupled oscillator controller ensures relative motions satisfy the PE condition (thereby guaranteeing observability of MCKF and PLKF) invokes standard results for linear time-varying systems, but does not re-derive the excitation condition or observability Gramian under the correntropy-based cost in MCKF (which alters the information matrix) or the pseudo-linear approximation in PLKF (which introduces linearization error). This leaves the central observability guarantee unverified for the actual filters used.
Authors: We agree that the manuscript applies standard PE results for LTV systems without an explicit re-derivation of the observability Gramian accounting for the correntropy cost function in the MCKF or the linearization in the PLKF. The analysis focuses on the underlying relative-motion regressors satisfying PE, which is intended to ensure positive definiteness of the information matrix for the base linear models. To strengthen the presentation, we will revise the theoretical analysis section to include additional discussion on the transfer of the PE condition to the modified filters, citing supporting results from robust filtering literature where appropriate. revision: yes
-
Referee: [Controller design] Controller design and observability proof: The design couples the oscillator dynamics to relative motions to enforce PE, but the manuscript does not explicitly address whether this creates circularity (i.e., the controller assumes the excitation it must induce) or whether the resulting trajectories satisfy the filter-specific persistence conditions required for MCKF convergence and PLKF bias analysis.
Authors: The coupled oscillator is embedded in the control law to generate trajectories with persistent relative motion by design; the PE proof is carried out on the closed-loop kinematic equations and holds for the motion trajectories independently of the instantaneous filter estimates. This structure avoids circularity because the excitation is enforced at the trajectory level, which then enables filter convergence. We will revise the manuscript to add an explicit clarification paragraph separating the control-induced PE from the filter convergence analysis and confirming that the resulting trajectories meet the required conditions for both the MCKF and PLKF. revision: yes
Circularity Check
No significant circularity; controller design and PE proof are independent
full rationale
The abstract states that a coupled oscillator controller is designed to achieve circumnavigation while ensuring PE, with separate theoretical analysis demonstrating that relative motions satisfy the PE condition to guarantee filter observability. This is a standard non-circular control design pattern (design for dual objectives, then prove satisfaction of excitation conditions) rather than any self-definitional reduction, fitted input renamed as prediction, or load-bearing self-citation chain. No equations or claims in the provided text reduce the observability guarantee to an assumption by construction. The derivation remains self-contained against standard linear time-varying system results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Survey of deep learning for autonomous surface vehicles in marine environments,
Y . Qiao, J. Yin, W. Wang, F. Duarte, J. Yang, and C. Ratti, “Survey of deep learning for autonomous surface vehicles in marine environments,”IEEE Trans. Intell. Transp. Syst., vol. 24, no. 4, pp. 3678–3701, 2023
2023
-
[2]
Unmanned surface vehicles: An overview of developments and challenges,
Z. Liu, Y . Zhang, X. Yu, and C. Yuan, “Unmanned surface vehicles: An overview of developments and challenges,”Annu. Rev. Control, vol. 41, pp. 71–93, 2016. AUTHOR ET AL.: SHORT ARTICLE TITLE 15
2016
-
[3]
Model-Reference Reinforcement Learning for Collision-Free Tracking Control of Autonomous Surface Vehicles,
Q. Zhang, W. Pan, and V . Reppa, “Model-Reference Reinforcement Learning for Collision-Free Tracking Control of Autonomous Surface Vehicles,”IEEE Trans. Intell. Transport. Syst., vol. 23, no. 7, pp. 8770–8781, Jul. 2022
2022
-
[4]
A cooperative localization algorithm based on time delay square root cubature kalman filter for USVs,
M. Tong, Y . Zhang, Q. Wang, and J. Shao, “A cooperative localization algorithm based on time delay square root cubature kalman filter for USVs,” in2022 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), 2022, pp. 1–4
2022
-
[5]
Coordinated target tracking by multiple unmanned surface vehicles with communication delays based on a distributed event-triggered extended state observer,
S. Gao, Z. Peng, L. Liu, H. Wang, and D. Wang, “Coordinated target tracking by multiple unmanned surface vehicles with communication delays based on a distributed event-triggered extended state observer,”Ocean Eng., vol. 227, p. 108283, May 2021
2021
-
[6]
Distributed Control of Unmanned Marine Vehicles for Target Circumnavigation in Communication-Denied Environments,
Z. Yan, H. Zheng, Z. Jiang, and W. Xu, “Distributed Control of Unmanned Marine Vehicles for Target Circumnavigation in Communication-Denied Environments,”IEEE/ASME Trans. Mechatron., pp. 1–12, 2024
2024
-
[7]
Internal model observer-based distributed moving-target-fencing control of multiple underactuated ma- rine surface vehicles with intermittent communications,
Y . Zheng and L. Zhang, “Internal model observer-based distributed moving-target-fencing control of multiple underactuated ma- rine surface vehicles with intermittent communications,”Ocean Eng., vol. 300, p. 117383, May 2024
2024
-
[8]
Cooperative strategy for pursuit- evasion problem with collision avoidance,
Z. Sun, H. Sun, P. Li, and J. Zou, “Cooperative strategy for pursuit- evasion problem with collision avoidance,”Ocean Eng., vol. 266, p. 112742, Dec. 2022
2022
-
[9]
Cooperative standoff tracking of moving targets using modified lyapunov vector field guidance,
F. Che, Y . Niu, J. Li, and L. Wu, “Cooperative standoff tracking of moving targets using modified lyapunov vector field guidance,” Appl. Sci., vol. 10, no. 11, p. 3709, 2020
2020
-
[10]
Circumnavigation of a moving target in 3d by multi-agent systems with collision avoidance: An orthogonal vector fields- based approach,
H. Zhong, Y . Wang, Z. Miao, J. Tan, L. Li, H. Zhang, and R. Fierro, “Circumnavigation of a moving target in 3d by multi-agent systems with collision avoidance: An orthogonal vector fields- based approach,”Int. J. Control Autom. Syst., vol. 17, no. 1, pp. 212–224, 2019
2019
-
[11]
Formation control and collision avoidance of un- manned water surface vehicles in maritime environments,
V . Mwaffo, “Formation control and collision avoidance of un- manned water surface vehicles in maritime environments,”J. Franklin Inst., vol. 361, no. 7, p. 106791, 2024
2024
-
[12]
Coopera- tive game method of heterogeneous unmanned surface vehicles based on distributed decision-making framework,
C. Chen, X. Liang, Z. Zhang, D. Liu, C. Yu, and W. Li, “Coopera- tive game method of heterogeneous unmanned surface vehicles based on distributed decision-making framework,”Ocean Eng., vol. 338, p. 122048, 2025
2025
-
[13]
Robusth ∞ time-varying formation tracking for heterogeneous multi-agent systems with unknown control input,
J. Liu, S. Yang, C. Dong, and P. Song, “Robusth ∞ time-varying formation tracking for heterogeneous multi-agent systems with unknown control input,”Electronics, vol. 14, no. 12, p. 2494, 6 2025
2025
-
[14]
Rein- forcement learning-based moving-target enclosing control for an unmanned surface vehicle in multi-obstacle environments,
Q. Wang, C. Liu, Y . Meng, X. Ren, and X. Wang, “Rein- forcement learning-based moving-target enclosing control for an unmanned surface vehicle in multi-obstacle environments,” Ocean Eng., vol. 304, p. 117920, Jul. 2024
2024
-
[15]
Finite-Time Learning- Based Optimal Elliptical Encircling Control for UA Vs With Prescribed Constraints,
X. Shao, F. Zhang, J. Liu, and Q. Zhang, “Finite-Time Learning- Based Optimal Elliptical Encircling Control for UA Vs With Prescribed Constraints,”IEEE Trans. Intell. Transport. Syst., vol. 26, no. 5, pp. 7065–7080, May 2025
2025
-
[16]
Enhanced Fixed-Time Collision-Free Elliptical Circumnavigation Coordination for UA Vs,
Z. Mei, X. Shao, Y . Xia, and J. Liu, “Enhanced Fixed-Time Collision-Free Elliptical Circumnavigation Coordination for UA Vs,”IEEE Trans. Aerosp. Electron. Syst., vol. 60, no. 4, pp. 4257–4270, Aug. 2024
2024
-
[17]
Distributed coordinated tracking control of multiple unmanned surface vehicles under complex marine environments,
X. Liang, X. Qu, Y . Hou, Y . Li, and R. Zhang, “Distributed coordinated tracking control of multiple unmanned surface vehicles under complex marine environments,”Ocean Eng., vol. 205, p. 107328, Jun. 2020
2020
-
[18]
Bearing-Only Motional Target- Surrounding Control for Multiple Unmanned Surface Vessels,
B.-B. Hu and H.-T. Zhang, “Bearing-Only Motional Target- Surrounding Control for Multiple Unmanned Surface Vessels,” IEEE Trans. Ind. Electron., vol. 69, no. 4, pp. 3988–3997, Apr. 2022
2022
-
[19]
Range-based target localization and pursuit with autonomous vehicles: An approach using posterior crlb and model predictive control,
N. T. Hung, N. Crasta, D. Moreno-Salinas, A. M. Pascoal, and T. A. Johansen, “Range-based target localization and pursuit with autonomous vehicles: An approach using posterior crlb and model predictive control,”Robot. Auton. Syst., vol. 132, p. 103608, 2020
2020
-
[20]
Distance-Based Elliptical Circumnavigation Control for Non-Holonomic Robots With Event-Triggered Unknown System Dynamics Estimators,
X. Shao, S. Li, W. Zhang, and E. Q. Wu, “Distance-Based Elliptical Circumnavigation Control for Non-Holonomic Robots With Event-Triggered Unknown System Dynamics Estimators,”IEEE Trans. Intell. Transport. Syst., vol. 24, no. 4, pp. 3986–3998, Apr. 2023
2023
-
[21]
Cooperative Distributed Estimation and Control of Multiple Autonomous Vehicles for Range-Based Underwater Target Localization and Pursuit,
N. T. Hung, F. F. C. Rego, and A. M. Pascoal, “Cooperative Distributed Estimation and Control of Multiple Autonomous Vehicles for Range-Based Underwater Target Localization and Pursuit,”IEEE Trans. Contr. Syst. Technol., vol. 30, no. 4, pp. 1433–1447, Jul. 2022
2022
-
[22]
Circumnavigation using distance measurements under slow drift,
I. Shames, S. Dasgupta, B. Fidan, and B. D. O. Anderson, “Circumnavigation using distance measurements under slow drift,”IEEE Trans. Autom. Control, vol. 57, no. 4, pp. 889– 903, 2012
2012
-
[23]
Enclosing control for multiagent systems with a moving target of unknown bounded velocity,
S. Ju, J. Wang, and L. Dou, “Enclosing control for multiagent systems with a moving target of unknown bounded velocity,” IEEE T. Cybern., vol. 52, no. 11, pp. 11 561–11 570, 2022
2022
-
[24]
Adaptive Bearing- Only Target Localization and Circumnavigation Under Un- known Wind Disturbance: Theory and Experiments,
D. Sui, M. Deghat, Z. Sun, and M. Eskandari, “Adaptive Bearing- Only Target Localization and Circumnavigation Under Un- known Wind Disturbance: Theory and Experiments,”IEEE Robot. Autom. Lett., vol. 9, no. 12, pp. 11 321–11 328, Dec. 2024
2024
-
[25]
A Recursive Total Least Squares Solution for Bearing-Only Target Motion Anal- ysis and Circumnavigation,
L. Li, X. Liu, Z. Qiu, T. Hu, and Q. Zhang, “A Recursive Total Least Squares Solution for Bearing-Only Target Motion Anal- ysis and Circumnavigation,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2025, pp. 18 942–18 947
2025
-
[26]
Persistently Excited Adaptive Relative Localization and Time- Varying Formation of Robot Swarms,
T.-M. Nguyen, Z. Qiu, T. H. Nguyen, M. Cao, and L. Xie, “Persistently Excited Adaptive Relative Localization and Time- Varying Formation of Robot Swarms,”IEEE Trans. Robot., vol. 36, no. 2, pp. 553–560, 04 2020
2020
-
[27]
Cooperative Circumnavigation for Multi-Quadrotor Systems Via Onboard Sensing,
X. Liu, L. Li, X. Zhou, Q. Zhang, and T. Hu, “Cooperative Circumnavigation for Multi-Quadrotor Systems Via Onboard Sensing,”IEEE Robot. Autom. Lett., vol. 10, no. 49, pp. 9248– 9255, 2025
2025
-
[28]
Ultra-Wideband and Odometry-Based Cooperative Relative Localization With Application to Multi- UA V Formation Control,
K. Guo, X. Li, and L. Xie, “Ultra-Wideband and Odometry-Based Cooperative Relative Localization With Application to Multi- UA V Formation Control,”IEEE Trans. Cybern., vol. 50, no. 6, pp. 2590–2603, Jun. 2020
2020
-
[29]
Vehicle Co- operative Positioning With Tightly Coupled GNSS/INS/UWB Integration Based on Improved Multiple Fading Factors and Adaptive Cost Function,
J. Zhao, W. Sun, W. Ding, Y . Li, P. Sun, and P. Sun, “Vehicle Co- operative Positioning With Tightly Coupled GNSS/INS/UWB Integration Based on Improved Multiple Fading Factors and Adaptive Cost Function,”IEEE Trans. Intell. Transport. Syst., vol. 26, no. 7, pp. 9740–9754, Jul. 2025
2025
-
[30]
Three-Dimensional Bearing-Only Target Following via Observability-Enhanced He- lical Guidance,
J. Li, Z. Ning, S. He, C.-H. Lee, and S. Zhao, “Three-Dimensional Bearing-Only Target Following via Observability-Enhanced He- lical Guidance,”IEEE Trans. Robot., pp. 1–18, 2022
2022
-
[31]
Integrated UWB-Vision approach for autonomous docking of UA Vs in GPS-denied environments,
T.-M. Nguyen, T. H. Nguyen, M. Cao, Z. Qiu, and L. Xie, “Integrated UWB-Vision approach for autonomous docking of UA Vs in GPS-denied environments,” in2019 International Conference on Robotics and Automation (ICRA), 5 2019, pp. 9603–9609
2019
-
[32]
MURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments,
A. Fishberg, B. Quiter, and J. P. How, “MURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments,”IEEE Robot. Autom. Lett., pp. 1–8, 2024
2024
-
[33]
Maximum cor- rentropy Kalman filter,
B. Chen, X. Liu, H. Zhao, and J. C. Principe, “Maximum cor- rentropy Kalman filter,”Automatica, vol. 76, pp. 70–77, Feb. 2017
2017
-
[34]
Localiza- tion and Circumnavigation of a Slowly Moving Target Using Bearing Measurements,
M. Deghat, I. Shames, B. D. O. Anderson, and C. Yu, “Localiza- tion and Circumnavigation of a Slowly Moving Target Using Bearing Measurements,”IEEE Trans. Automat. Contr., vol. 59, no. 8, pp. 2182–2188, Aug. 2014
2014
-
[35]
Formation Control for Enclosing and Tracking via Relative Localization,
X. Liu, D. Zhang, Q. Zhang, and T. Hu, “Formation Control for Enclosing and Tracking via Relative Localization,”IEEE Trans. Aerosp. Electron. Syst., vol. 61, no. 4, pp. 10 558–10 569, 2025
2025
-
[36]
Formation Control for Mov- ing Target Enclosing via Relative Localization,
X. Liu, K. Liu, T. Hu, and Q. Zhang, “Formation Control for Mov- ing Target Enclosing via Relative Localization,” in2023 62nd 16 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. XX, No. XX XXXXX 2022 IEEE Conference on Decision and Control (CDC). Singapore, Singapore: IEEE, Dec. 2023, pp. 1400–1405
2022
-
[37]
Optimal spatial–temporal triangulation for bearing-only cooperative mo- tion estimation,
C. Zheng, Y . Mi, H. Guo, H. Chen, Z. Lin, and S. Zhao, “Optimal spatial–temporal triangulation for bearing-only cooperative mo- tion estimation,”Automatica, vol. 175, p. 112216, May 2025
2025
-
[38]
Synchronization in complex networks of phase oscillators: A survey,
F. D ¨orfler and F. Bullo, “Synchronization in complex networks of phase oscillators: A survey,”Automatica, vol. 50, no. 6, pp. 1539–1564, Jun. 2014
2014
-
[39]
A survey of multi-agent formation control,
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,”Automatica, vol. 53, pp. 424–440, Mar. 2015
2015
-
[40]
Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures,
D. Zhou, Z. Wang, and M. Schwager, “Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures,”IEEE Trans. Robot., vol. 34, no. 4, pp. 916– 923, Aug. 2018
2018
-
[41]
Collision-free time- varying formation control via relative localization,
F. Xue, J. Zuo, X. Liu, and Q. Zhang, “Collision-free time- varying formation control via relative localization,” inIntel- ligent Robotics and Applications, X. Lan, X. Mei, C. Jiang, F. Zhao, and Z. Tian, Eds. Singapore: Springer Nature Singapore, 2025, pp. 363–375
2025
-
[42]
A novel adaptive kalman filter with inaccurate process and measure- ment noise covariance matrices,
Y . Huang, Y . Zhang, Z. Wu, N. Li, and J. Chambers, “A novel adaptive kalman filter with inaccurate process and measure- ment noise covariance matrices,”IEEE Trans. Autom. Control, vol. 63, no. 2, pp. 594–601, 2018
2018
-
[43]
Functional linear regression with huber loss,
H. Tong, “Functional linear regression with huber loss,”J. Com- plex., vol. 74, p. 101696, 2023
2023
-
[44]
UTIL: An ultra-wideband time-difference-of-arrival indoor localization dataset,
W. Zhao, A. Goudar, X. Qiao, and A. P. Schoellig, “UTIL: An ultra-wideband time-difference-of-arrival indoor localization dataset,”Int. J. Robot. Res., vol. 43, no. 10, pp. 1443–1456, Sep. 2024. AUTHOR ET AL.: SHORT ARTICLE TITLE 17
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.