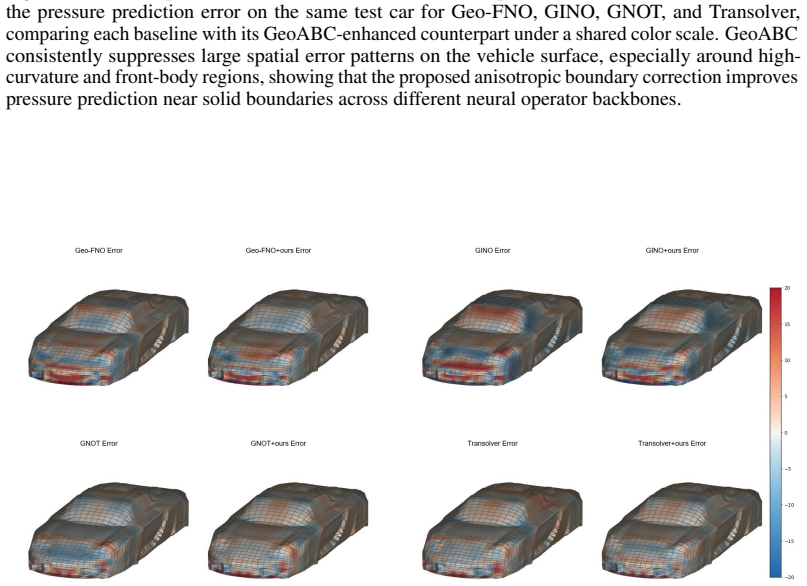
Geometry-Aware Anisotropic Boundary Correction for Aerodynamic Simulation
Pith reviewed 2026-06-27 14:54 UTC · model grok-4.3
The pith
GeoABC adds geometry-conditioned anisotropic boundary correction to neural operators for more accurate near-wall aerodynamic predictions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
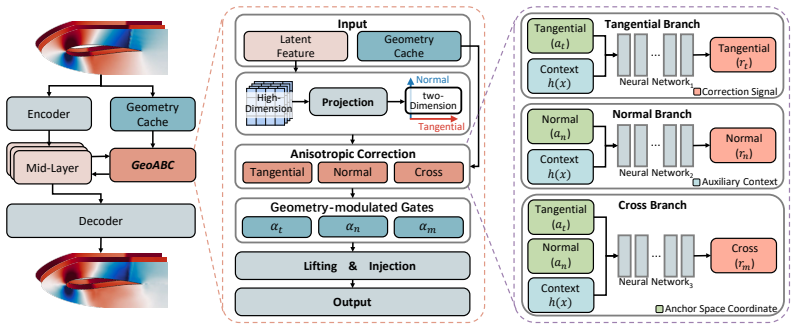
GeoABC is a geometry-conditioned anisotropic boundary correction framework that leverages boundary geometries to introduce direction-aware boundary correction into the intermediate representations of neural operators, transforming boundary geometry from static input features into a structural prior that modulates physical prediction and reduces near-boundary relative L2 error by approximately 38 percent on average.
What carries the argument
GeoABC, the geometry-conditioned anisotropic boundary correction framework, which injects direction-aware corrections from boundary geometry into neural operator intermediate layers to separately handle tangential flow propagation along the wall and normal constraint by the wall.
If this is right
- GeoABC can be attached to multiple existing neural operator architectures without altering their core design.
- The correction narrows the near-wall performance gap that appears across mainstream neural operators for aerodynamic tasks.
- Gains appear consistently on both 2D airfoil and 3D car flow problems.
- Boundary geometry changes from a passive input into an active modulator of the predicted flow field.
Where Pith is reading between the lines
- The same direction-aware correction idea could be tested in other interface-dominated simulations such as heat conduction or wave propagation at material boundaries.
- Combining GeoABC with mesh-free neural operators might allow high-resolution near-wall accuracy without increasing overall grid density.
- Evaluating the framework on full-vehicle or aircraft geometries would show whether the 38 percent error reduction holds at larger scales.
Load-bearing premise
Aerodynamic flows near solid boundaries exhibit consistent anisotropy that geometry information can capture and correct inside the neural operator's intermediate representations.
What would settle it
Running the same 2D airfoil or 3D car experiments with the identical neural operator backbone but without the anisotropic geometry correction and finding no reduction or an increase in near-boundary relative L2 error.
Figures



read the original abstract
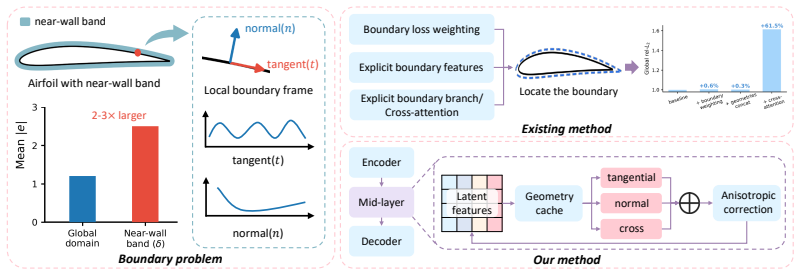
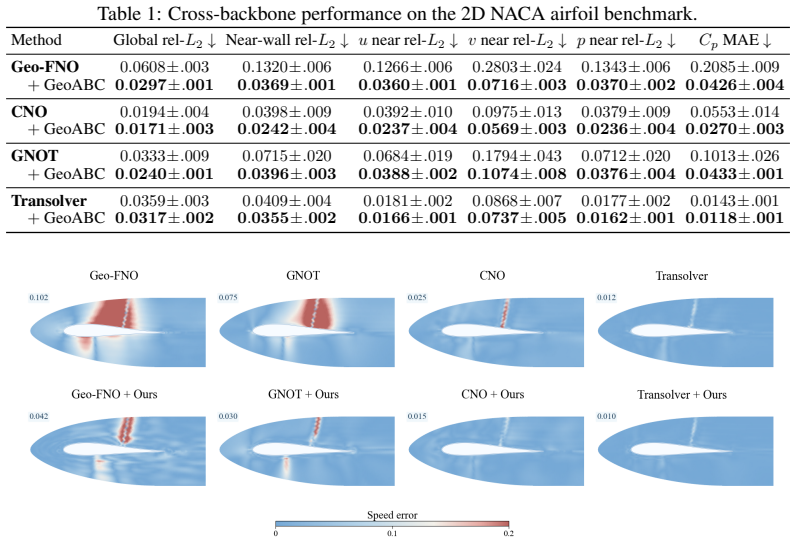
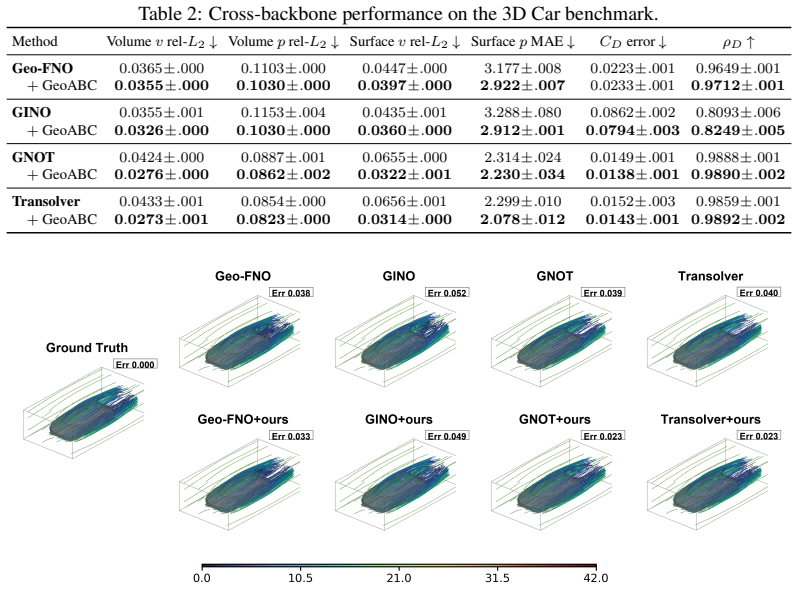
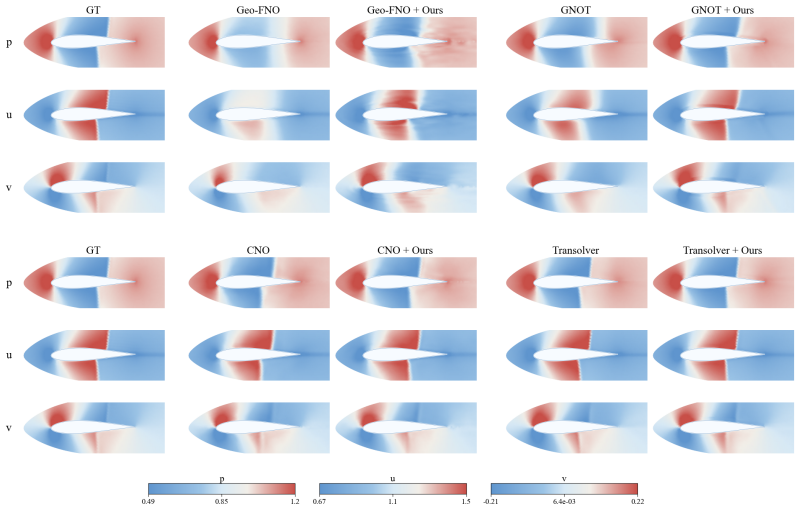
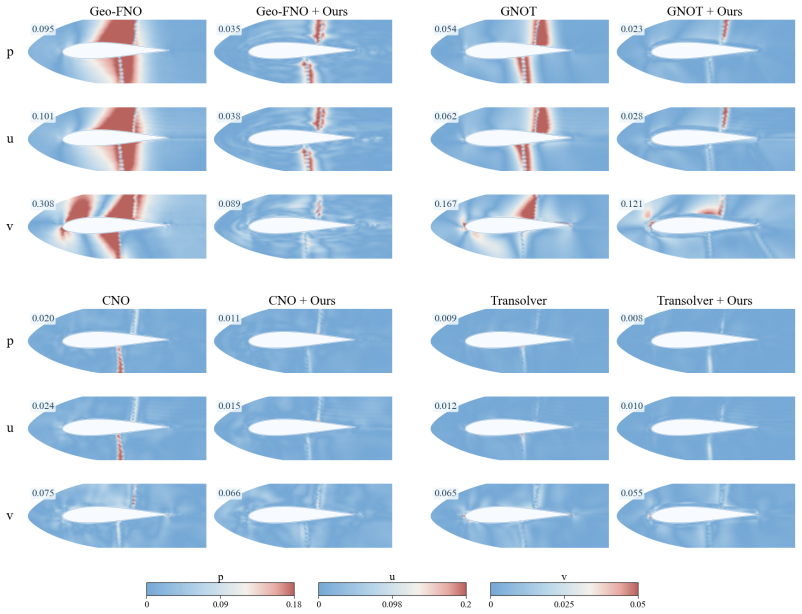
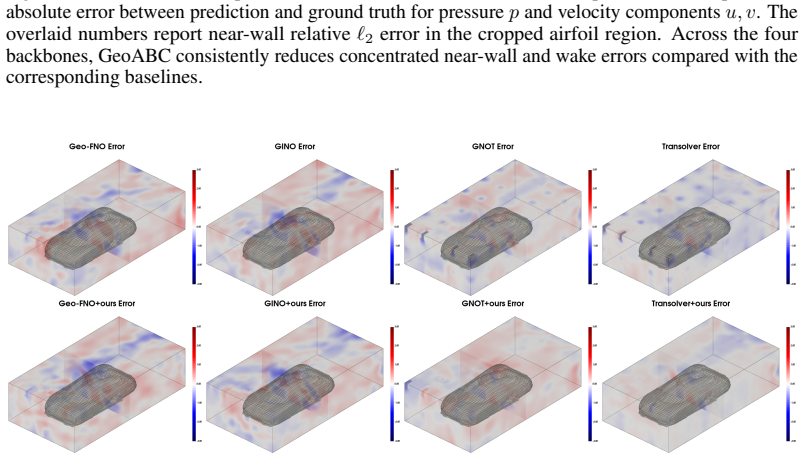
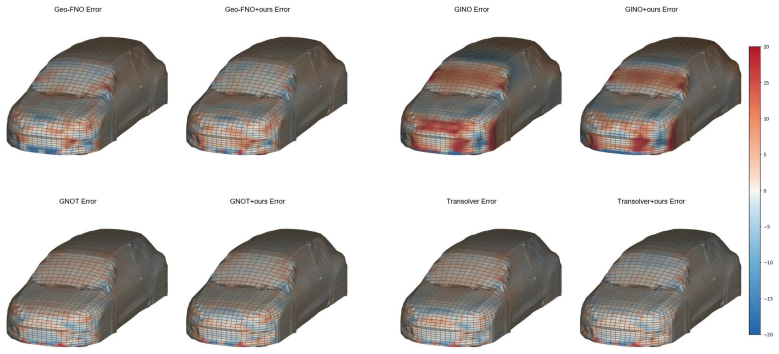
Aerodynamic simulation is a key component of engineering shape design, where core quantities such as the surface pressure coefficient strongly depend on flow dynamics near solid boundaries. Neural operators provide an efficient alternative to expensive Computational Fluid Dynamics (CFD) solvers. However, conventional methods treat the boundary region isotropically, failing to account for the distinct physical behaviors along the boundaries. In reality, the aerodynamic process exhibits anisotropy: along the tangential direction, flow propagates along the wall; along the normal direction, physical quantities are constrained by the wall. To explicitly model the distinct physical behaviors, we propose GeoABC, a geometry-conditioned anisotropic boundary correction framework. GeoABC leverages the boundary geometries to introduce direction-aware boundary correction into the intermediate representations of neural operators, transforming boundary geometry from static input features into a structural prior that modulates physical prediction. On 2D airfoil and 3D car tasks, GeoABC consistently adapts to multiple neural operator backbones, reducing near-boundary relative $L_2$ error by $\sim$38\% on average, narrowing the structural near-wall gap shared by mainstream neural operators, and advancing neural operators toward high-fidelity aerodynamic simulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes GeoABC, a geometry-conditioned anisotropic boundary correction framework for neural operators applied to aerodynamic simulation. It claims that standard neural operators treat boundaries isotropically and fail to capture the distinct tangential propagation versus normal constraint behaviors near walls; GeoABC conditions intermediate representations on boundary geometry to introduce direction-aware corrections. Empirical results on 2D airfoil and 3D car tasks show an average ~38% reduction in near-boundary relative L2 error across multiple backbones, narrowing the structural near-wall gap.
Significance. If the reported gains are robust, this approach could meaningfully improve near-wall fidelity in neural-operator surrogates for aerodynamics, a known weakness that limits their engineering utility. Credit is due for the consistent adaptation across backbones and for testing on both 2D and 3D geometries.
major comments (1)
- [§4] §4 (Experiments): the central claim attributes the ~38% near-boundary L2 reduction specifically to the anisotropic (direction-aware) component that models tangential flow propagation versus normal constraint. No ablation isolating this directionality from a geometry-conditioned but isotropic variant is reported, leaving it unclear whether anisotropy is load-bearing or whether geometry modulation alone suffices.
minor comments (1)
- [Abstract] Abstract: the 38% error reduction is stated without reference to the precise baselines, number of runs, or definition of the near-boundary region, which weakens immediate assessment of the result.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on our experimental design. We address it below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [§4] §4 (Experiments): the central claim attributes the ~38% near-boundary L2 reduction specifically to the anisotropic (direction-aware) component that models tangential flow propagation versus normal constraint. No ablation isolating this directionality from a geometry-conditioned but isotropic variant is reported, leaving it unclear whether anisotropy is load-bearing or whether geometry modulation alone suffices.
Authors: We agree that an explicit ablation isolating the anisotropic (direction-aware) component from a purely geometry-conditioned isotropic variant would strengthen the central claim. In the revised manuscript we will add this ablation by implementing and evaluating a geometry-conditioned isotropic baseline on the same 2D airfoil and 3D car tasks, thereby quantifying the incremental benefit attributable to directionality. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents GeoABC as an empirical framework that conditions neural operator representations on boundary geometry to enforce direction-aware corrections motivated by observed tangential vs. normal flow behaviors. The central performance claim (∼38% near-boundary L2 reduction) is reported as an outcome of applying the method to 2D airfoil and 3D car tasks across multiple backbones; no derivation, uniqueness theorem, or fitted parameter is shown to reduce by construction to the target metric. No self-citations appear in the provided text, and the anisotropy modeling is introduced as an architectural choice rather than a self-referential definition. The result is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Aerodynamic process exhibits anisotropy: along the tangential direction, flow propagates along the wall; along the normal direction, physical quantities are constrained by the wall.
invented entities (1)
-
GeoABC framework
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Anderson.Computational Fluid Dynamics: The Basics with Applications
John D. Anderson.Computational Fluid Dynamics: The Basics with Applications. McGraw- Hill, New York, 1995
1995
-
[2]
Aerodynamic design via control theory.Journal of Scientific Computing, 3(3):233–260, 1988
Antony Jameson. Aerodynamic design via control theory.Journal of Scientific Computing, 3(3):233–260, 1988
1988
-
[3]
Butterworth- Heinemann, 3rd edition, 2015
Jiri Blazek.Computational Fluid Dynamics: Principles and Applications. Butterworth- Heinemann, 3rd edition, 2015
2015
-
[4]
Ferziger and Milovan Peri´c.Computational Methods for Fluid Dynamics
Joel H. Ferziger and Milovan Peri´c.Computational Methods for Fluid Dynamics. Springer, 3rd edition, 2002
2002
-
[5]
Aerodynamic design optimization: Challenges and perspectives.Com- puters & Fluids, 239:105391, 2022
Joaquim RRA Martins. Aerodynamic design optimization: Challenges and perspectives.Com- puters & Fluids, 239:105391, 2022
2022
-
[6]
Method for the constrained design of natural laminar flow airfoils.Journal of aircraft, 34(6):706–712, 1997
Bradford E Green, John L Whitesides, Richard L Campbell, and Raymond E Mineck. Method for the constrained design of natural laminar flow airfoils.Journal of aircraft, 34(6):706–712, 1997
1997
-
[7]
Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang
George Em Karniadakis, Ioannis G. Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang. Physics-informed machine learning.Nature Reviews Physics, 3(6):422–440, 2021
2021
-
[8]
Maziar Raissi, Paris Perdikaris, and George Em Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019
2019
-
[9]
Machine learning for fluid mechanics.Annual review of fluid mechanics, 52(1):477–508, 2020
Steven L Brunton, Bernd R Noack, and Petros Koumoutsakos. Machine learning for fluid mechanics.Annual review of fluid mechanics, 52(1):477–508, 2020
2020
-
[10]
Learning nonlinear operators via deeponet based on the universal approximation theorem of operators
Lu Lu, Pengzhan Jin, Guofei Pang, Zhongqiang Zhang, and George Em Karniadakis. Learning nonlinear operators via deeponet based on the universal approximation theorem of operators. Nat. Mach. Intell., 3(3):218–229, 2021
2021
-
[11]
Stuart, and Anima Anandkumar
Zongyi Li, Nikola Borislavov Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhat- tacharya, Andrew M. Stuart, and Anima Anandkumar. Fourier neural operator for parametric partial differential equations. In9th International Conference on Learning Representations, ICLR 2021, Virtual Event, Austria, May 3-7, 2021. OpenReview.net, 2021
2021
-
[12]
Stuart, and Anima Anandkumar
Nikola Kovachki, Zongyi Li, Burigede Liu, Kamyar Azizzadenesheli, Kaushik Bhattacharya, Andrew M. Stuart, and Anima Anandkumar. Neural operator: Learning maps between function spaces with applications to PDEs.Journal of Machine Learning Research, 24(89):1–97, 2023
2023
-
[13]
Neural fields for rapid aircraft aerodynamics simulations.Scientific Reports, 14(1):25496, 2024
Giovanni Catalani, Siddhant Agarwal, Xavier Bertrand, Frederic Tost, Michael Bauerheim, and Joseph Morlier. Neural fields for rapid aircraft aerodynamics simulations.Scientific Reports, 14(1):25496, 2024
2024
-
[14]
Prediction of compressor blade cascade flow field based on fourier neural operator.Aerospace Science and Technology, 163:110208, 2025
Lixiang Jiang, Xinlong Feng, and Quanyong Xu. Prediction of compressor blade cascade flow field based on fourier neural operator.Aerospace Science and Technology, 163:110208, 2025
2025
-
[15]
Towards scalable surrogate models based on neural fields for large scale aerodynamic simulations.Computers & Fluids, page 106929, 2025
Giovanni Catalani, Jean Fesquet, Xavier Bertrand, Frédéric Tost, Michael Bauerheim, and Joseph Morlier. Towards scalable surrogate models based on neural fields for large scale aerodynamic simulations.Computers & Fluids, page 106929, 2025
2025
-
[16]
Effect of adverse pressure gradients on turbulent wing boundary layers.Journal of Fluid Mechanics, 883:A8, 2020
Álvaro Tanarro, Ricardo Vinuesa, and Philipp Schlatter. Effect of adverse pressure gradients on turbulent wing boundary layers.Journal of Fluid Mechanics, 883:A8, 2020
2020
-
[17]
Pressure-gradient turbulent boundary layers developing around a wing section.Flow, turbulence and combustion, 99(3):613–641, 2017
Ricardo Vinuesa, Seyed M Hosseini, Ardeshir Hanifi, Dan S Henningson, and Philipp Schlatter. Pressure-gradient turbulent boundary layers developing around a wing section.Flow, turbulence and combustion, 99(3):613–641, 2017
2017
-
[18]
Strategies for turbulence modelling and simulations.International journal of heat and fluid flow, 21(3):252–263, 2000
Philippe R Spalart. Strategies for turbulence modelling and simulations.International journal of heat and fluid flow, 21(3):252–263, 2000. 10
2000
-
[19]
Unsteady aerodynamic characteristics of pitching flat plates at low reynolds numbers.Journal of Aircraft, 58(4):917–934, 2021
Camli Badrya, Bharath Govindarajan, Albert Medina, Seung Joon Yang, and Inderjit Chopra. Unsteady aerodynamic characteristics of pitching flat plates at low reynolds numbers.Journal of Aircraft, 58(4):917–934, 2021
2021
-
[20]
Design of airfoils to mitigate wake bursting
Brent W Pomeroy and Michael S Selig. Design of airfoils to mitigate wake bursting. In55th AIAA Aerospace Sciences Meeting, page 1210, 2017
2017
-
[21]
Enhancing computational fluid dynamics with machine learning.Nature Computational Science, 2(6):358–366, 2022
Ricardo Vinuesa and Steven L Brunton. Enhancing computational fluid dynamics with machine learning.Nature Computational Science, 2(6):358–366, 2022
2022
-
[22]
Fourier neural operator with learned deformations for pdes on general geometries.J
Zongyi Li, Daniel Zhengyu Huang, Burigede Liu, and Anima Anandkumar. Fourier neural operator with learned deformations for pdes on general geometries.J. Mach. Learn. Res., 24:388:1–388:26, 2023
2023
-
[23]
GNOT: A general neural operator transformer for operator learning
Zhongkai Hao, Zhengyi Wang, Hang Su, Chengyang Ying, Yinpeng Dong, Songming Liu, Ze Cheng, Jian Song, and Jun Zhu. GNOT: A general neural operator transformer for operator learning. In Andreas Krause, Emma Brunskill, Kyunghyun Cho, Barbara Engelhardt, Sivan Sabato, and Jonathan Scarlett, editors,International Conference on Machine Learning, ICML 2023, 23-...
2023
-
[24]
Kovachki, Christopher B
Zongyi Li, Nikola B. Kovachki, Christopher B. Choy, Boyi Li, Jean Kossaifi, Shourya Prakash Otta, Mohammad Amin Nabian, Maximilian Stadler, Christian Hundt, Kamyar Azizzadenesheli, and Animashree Anandkumar. Geometry-informed neural operator for large-scale 3d pdes. In Alice Oh, Tristan Naumann, Amir Globerson, Kate Saenko, Moritz Hardt, and Sergey Levine...
2023
-
[25]
Thompson, Z
Joe F. Thompson, Z. U. A. Warsi, and C. Wayne Mastin.Numerical Grid Generation: Founda- tions and Applications. North-Holland, New York, 1985
1985
-
[26]
Neural operator: Learning maps between function spaces with applications to pdes.Journal of Machine Learning Research, 24(89):1–97, 2023
Nikola Kovachki, Zongyi Li, Burigede Liu, Kamyar Azizzadenesheli, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Neural operator: Learning maps between function spaces with applications to pdes.Journal of Machine Learning Research, 24(89):1–97, 2023
2023
-
[27]
Temporal neural operator for modeling time- dependent physical phenomena.Scientific Reports, 15(1):32791, 2025
Waleed Diab and Mohammed Al Kobaisi. Temporal neural operator for modeling time- dependent physical phenomena.Scientific Reports, 15(1):32791, 2025
2025
-
[28]
Continuum attention for neural operators.Journal of Machine Learning Research, 26(300):1–52, 2025
Edoardo Calvello, Nikola B Kovachki, Matthew E Levine, and Andrew M Stuart. Continuum attention for neural operators.Journal of Machine Learning Research, 26(300):1–52, 2025
2025
-
[29]
Fano: Fourier advection neural operator for weather prediction.IEEE Transactions on Geoscience and Remote Sensing, 2026
Kenghong Lin, Huiwei Lin, Baoquan Zhang, Yangjinxi Ge, Dong Liu, Xutao Li, Yunming Ye, and Chuyao Luo. Fano: Fourier advection neural operator for weather prediction.IEEE Transactions on Geoscience and Remote Sensing, 2026
2026
-
[30]
Transolver: A fast transformer solver for pdes on general geometries
Haixu Wu, Huakun Luo, Haowen Wang, Jianmin Wang, and Mingsheng Long. Transolver: A fast transformer solver for pdes on general geometries. In Ruslan Salakhutdinov, Zico Kolter, Katherine A. Heller, Adrian Weller, Nuria Oliver, Jonathan Scarlett, and Felix Berkenkamp, editors,Forty-first International Conference on Machine Learning, ICML 2024, Vienna, Aust...
2024
-
[31]
Dpot: auto-regressive denoising operator transformer for large-scale pde pre-training
Zhongkai Hao, Chang Su, Songming Liu, Julius Berner, Chengyang Ying, Hang Su, Anima Anandkumar, Jian Song, and Jun Zhu. Dpot: auto-regressive denoising operator transformer for large-scale pde pre-training. InProceedings of the 41st International Conference on Machine Learning, ICML’24. JMLR.org, 2024
2024
-
[32]
Universal physics transformers: A framework for efficiently scaling neural operators.Advances in Neural Information Processing Systems, 37:25152–25194, 2024
Benedikt Alkin, Andreas Fürst, Simon Schmid, Lukas Gruber, Markus Holzleitner, and Johannes Brandstetter. Universal physics transformers: A framework for efficiently scaling neural operators.Advances in Neural Information Processing Systems, 37:25152–25194, 2024. 11
2024
-
[33]
Pretraining codomain attention neural operators for solving multiphysics pdes.Advances in Neural Information Processing Systems, 37:104035–104064, 2024
Ashiqur Rahman, Robert J George, Mogab Elleithy, Daniel Leibovici, Zongyi Li, Boris Bonev, Colin White, Julius Berner, Raymond A Yeh, Jean Kossaifi, et al. Pretraining codomain attention neural operators for solving multiphysics pdes.Advances in Neural Information Processing Systems, 37:104035–104064, 2024
2024
-
[34]
Poseidon: Efficient foundation models for pdes
Maximilian Herde, Bogdan Raoni ´c, Tobias Rohner, Roger Käppeli, Roberto Molinaro, Em- manuel De Bezenac, and Siddhartha Mishra. Poseidon: Efficient foundation models for pdes. Advances in Neural Information Processing Systems, 37:72525–72624, 2024
2024
-
[35]
Geopt: Scaling physics simulation via lifted geometric pre-training, 2026
Haixu Wu, Minghao Guo, Zongyi Li, Zhiyang Dou, Mingsheng Long, Kaiming He, and Wojciech Matusik. Geopt: Scaling physics simulation via lifted geometric pre-training, 2026
2026
-
[36]
From cheap geometry to expensive physics: A physics-agnostic pretraining framework for neural operators
Zhizhou Zhang, Youjia Wu, Kaixuan Zhang, and Yanjia Wang. From cheap geometry to expensive physics: A physics-agnostic pretraining framework for neural operators. InThe Fourteenth International Conference on Learning Representations, 2026
2026
-
[37]
BENO: boundary- embedded neural operators for elliptic pdes
Haixin Wang, Jiaxin Li, Anubhav Dwivedi, Kentaro Hara, and Tailin Wu. BENO: boundary- embedded neural operators for elliptic pdes. InThe Twelfth International Conference on Learning Representations, ICLR 2024, Vienna, Austria, May 7-11, 2024. OpenReview.net, 2024
2024
-
[38]
Cross-field interface-aware neural operators for multiphase flow simulation
Zhenzhong Wang, Xin Zhang, Jun Liao, and Min Jiang. Cross-field interface-aware neural operators for multiphase flow simulation. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40, pages 26769–26777, 2026
2026
-
[39]
Benedikt Alkin, Maurits Bleeker, Richard Kurle, Tobias Kronlachner, Reinhard Sonnleit- ner, Matthias Dorfer, and Johannes Brandstetter. Ab-upt: Scaling neural cfd surrogates for high-fidelity automotive aerodynamics simulations via anchored-branched universal physics transformers.arXiv preprint arXiv:2502.09692, 2025
arXiv 2025
-
[40]
Point cloud neural operator for parametric pdes on complex and variable geometries.Computer Methods in Applied Mechanics and Engineering, 443:118022, 2025
Chenyu Zeng, Yanshu Zhang, Jiayi Zhou, Yuhan Wang, Zilin Wang, Yuhao Liu, Lei Wu, and Daniel Zhengyu Huang. Point cloud neural operator for parametric pdes on complex and variable geometries.Computer Methods in Applied Mechanics and Engineering, 443:118022, 2025
2025
-
[41]
Learning three-dimensional flow for interactive aerody- namic design.ACM Transactions on Graphics (TOG), 37(4):1–10, 2018
Nobuyuki Umetani and Bernd Bickel. Learning three-dimensional flow for interactive aerody- namic design.ACM Transactions on Graphics (TOG), 37(4):1–10, 2018
2018
-
[42]
Bogdan Raonic, Roberto Molinaro, Tim De Ryck, Tobias Rohner, Francesca Bartolucci, Rima Alaifari, Siddhartha Mishra, and Emmanuel de Bézenac. Convolutional neural operators for robust and accurate learning of pdes. In Alice Oh, Tristan Naumann, Amir Globerson, Kate Saenko, Moritz Hardt, and Sergey Levine, editors,Advances in Neural Information Processing ...
arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.