Vision-Language-Action Models Meet World Models: Embodied Agentic AI for Low-Altitude Wireless Networks
Pith reviewed 2026-06-27 08:31 UTC · model grok-4.3
The pith
Integrating vision-language-action models with world models enables embodied decision-making for UAVs in low-altitude wireless networks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
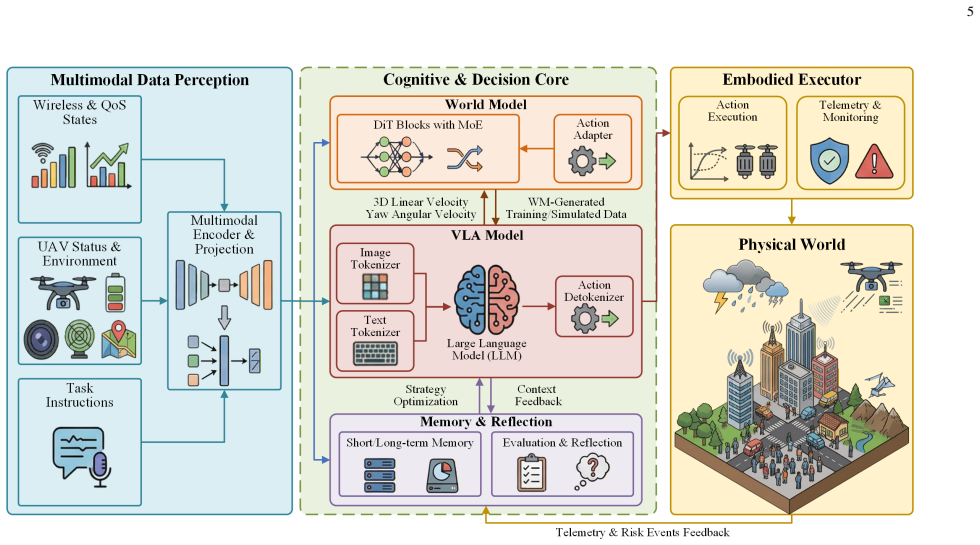
The Embodied Agentic UAV framework centers on a Vision-Language-Action model for end-to-end embodied decision-making from perception to control and introduces a World Model to capture the coupling between UAV actions and environmental state evolution for prediction, policy verification, and dynamic optimization, along with memory and reflection mechanisms for adaptive closed-loop optimization.
What carries the argument
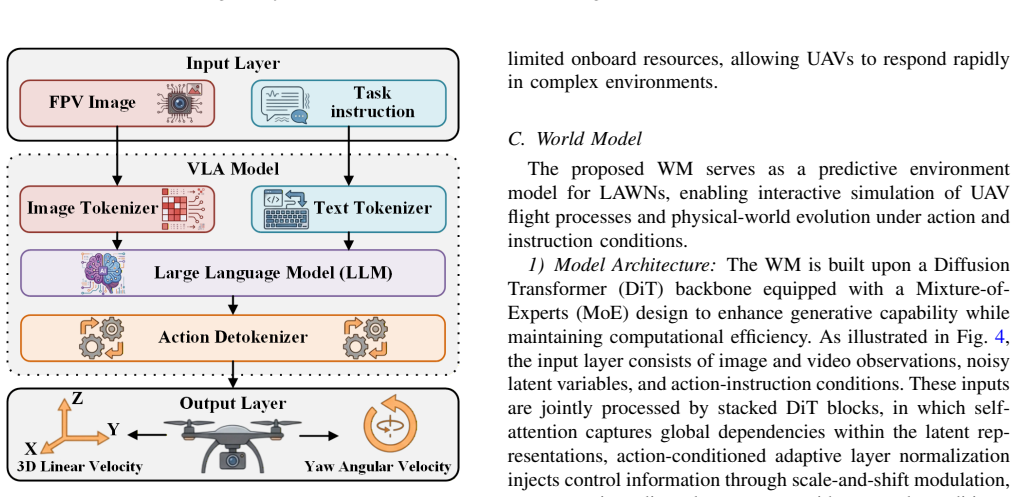
The Vision-Language-Action (VLA) model as the execution core paired with a World Model that models action-environment coupling.
If this is right
- The framework supports environment prediction, policy verification, and dynamic optimization.
- It forms an adaptive closed-loop optimization paradigm of decision, execution, evaluation, and update.
- This enhances the system's autonomous decision-making capability and continual evolution ability.
- Experimental results show it enables robust, predictive, and sustainable autonomous control in LAWNs.
Where Pith is reading between the lines
- Such a system might reduce the need for constant human oversight in UAV network management.
- It could be adapted to ground-based robotic systems facing similar perception and control challenges.
- Integrating these models may lead to more energy-efficient operations in wireless networks by optimizing UAV paths and actions.
Load-bearing premise
A World Model can sufficiently capture the coupling between UAV actions and environmental state evolution to support prediction and optimization.
What would settle it
Real-world UAV flight tests where the world model predictions diverge significantly from actual environmental changes or where the closed-loop optimization fails to improve performance over time.
Figures



read the original abstract
Low-Altitude Wireless Networks (LAWNs), composed of Unmanned Aerial Vehicles (UAVs) and other aerial platforms, provide integrated perception, communication, and computation services in low-altitude airspace. However, deploying large generative models in this domain faces three major challenges: 1) Limited embodied action mapping; 2) Inadequate physical environment modeling; 3) Insufficient closed-loop optimization. To address these challenges, this study proposes an Embodied Agentic UAV framework. Centered on a Vision-Language-Action (VLA) model as the execution core, the framework establishes an end-to-end embodied decision-making pipeline from multimodal environmental perception to continuous control generation. In addition, a World Model (WM) is introduced to capture the coupling between UAV actions and environmental state evolution, thereby supporting environment prediction, policy verification, and dynamic optimization. Furthermore, memory and reflection mechanisms are incorporated to form an adaptive closed-loop optimization paradigm of decision, execution, evaluation, and update, thereby enhancing the system's autonomous decision-making capability and continual evolution ability in complex dynamic environments. Experimental results validate its effectiveness in enabling robust, predictive, and sustainable autonomous control in LAWNs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an Embodied Agentic UAV framework for Low-Altitude Wireless Networks (LAWNs) that centers a Vision-Language-Action (VLA) model as the execution core, augmented by a World Model (WM) to capture couplings between UAV actions and environmental state evolution. Memory and reflection mechanisms are added to create a closed-loop paradigm of decision, execution, evaluation, and update. The abstract asserts that experimental results validate the framework's effectiveness for robust, predictive, and sustainable autonomous control.
Significance. If the claimed integration of VLA models with WM successfully enables environment prediction, policy verification, and dynamic optimization in UAV settings, the work could advance embodied AI applications in wireless networks by addressing gaps in physical modeling and closed-loop adaptation for dynamic low-altitude environments.
major comments (1)
- Abstract: The assertion that 'Experimental results validate its effectiveness' supplies no methods, metrics, baselines, datasets, or quantitative results, which is load-bearing for the central effectiveness claim and prevents any assessment of whether the WM captures the stated action-environment coupling for prediction and optimization.
minor comments (1)
- The manuscript would benefit from explicit architectural diagrams or pseudocode to clarify the end-to-end pipeline from multimodal perception through WM-based verification to control generation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the single major comment below and agree that the abstract can be strengthened for greater transparency.
read point-by-point responses
-
Referee: [—] Abstract: The assertion that 'Experimental results validate its effectiveness' supplies no methods, metrics, baselines, datasets, or quantitative results, which is load-bearing for the central effectiveness claim and prevents any assessment of whether the WM captures the stated action-environment coupling for prediction and optimization.
Authors: We agree that the abstract, being a concise summary, does not include the requested specifics on methods, metrics, baselines, datasets, or quantitative results. These details appear in the Experiments and Results sections of the full manuscript, which describe the simulation environments, metrics (including prediction accuracy for action-environment couplings and control stability), baselines (standard VLA without WM and traditional UAV controllers), UAV trajectory datasets, and quantitative gains (e.g., improved predictive performance and closed-loop optimization). To directly address the concern and enable immediate assessment of the WM's role, we will revise the abstract to incorporate a brief statement of the key experimental setup, metrics, and findings demonstrating the claimed couplings and effectiveness. revision: yes
Circularity Check
No derivation chain present; no circularity detected
full rationale
The paper text (abstract and description) contains no equations, derivations, fitted parameters, self-citations, or load-bearing claims that reduce any result to its own inputs by construction. The proposal introduces a VLA+WM framework conceptually and asserts experimental validation, but supplies no mathematical steps, ansatzes, or uniqueness theorems that could be inspected for self-definition or renaming. This is the common case of a framework paper with no derivational content to analyze for circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Advancing the control of low-altitude wireless networks: Architecture, design principles, and future directions,
H. Jin, W. Yuan, J. Wu, J. Wang, D. Niyato, X. Wang, G. K. Kara- giannidis, Z. Lin, Y . Gong, D. I. Kimet al., “Advancing the control of low-altitude wireless networks: Architecture, design principles, and future directions,”npj Wireless Technology, vol. 2, no. 1, p. 2, 2026
2026
-
[2]
Measurement-based modeling and analysis of uav air-ground channels at 1 and 4 ghz,
Z. Cui, C. Briso-Rodr ´ıguez, K. Guan, C. Calvo-Ram ´ırez, B. Ai, and Z. Zhong, “Measurement-based modeling and analysis of uav air-ground channels at 1 and 4 ghz,”IEEE Antennas and Wireless Propagation Letters, vol. 18, no. 9, pp. 1804–1808, 2019
2019
-
[3]
A comprehensive survey of large ai models for future communications: Foundations, applications, and challenges,
F. Jiang, C. Pan, L. Dong, K. Wang, M. Debbah, D. Niyato, and Z. Han, “A comprehensive survey of large ai models for future communications: Foundations, applications, and challenges,”IEEE Communications Sur- veys & Tutorials, vol. 28, pp. 4731–4764, 2026
2026
-
[4]
Vision- language-action models for robotics: A review towards real-world ap- plications,
K. Kawaharazuka, J. Oh, J. Yamada, I. Posner, and Y . Zhu, “Vision- language-action models for robotics: A review towards real-world ap- plications,”IEEE Access, vol. 13, pp. 162 467–162 504, 2025
2025
-
[5]
Artificial general intelligence (agi)-native wireless systems: A journey beyond 6g,
W. Saad, O. Hashash, C. K. Thomas, C. Chaccour, M. Debbah, N. Man- dayam, and Z. Han, “Artificial general intelligence (agi)-native wireless systems: A journey beyond 6g,”Proceedings of the IEEE, vol. 113, no. 9, pp. 849–887, 2025
2025
-
[6]
Closing the planning–learning loop with application to autonomous driving,
P. Cai and D. Hsu, “Closing the planning–learning loop with application to autonomous driving,”IEEE Transactions on Robotics, vol. 39, no. 2, pp. 998–1011, 2023
2023
-
[7]
Dronenav: Unified text-visual representation and structured spatial reasoning for robust uav vision-and-language navigation,
F. Liu, G. Li, L. Zou, Y . Chen, and P. Cheng, “Dronenav: Unified text-visual representation and structured spatial reasoning for robust uav vision-and-language navigation,”Neurocomputing, p. 133492, 2026
2026
-
[8]
From large ai models to agentic ai: A tutorial on future intelligent communications,
F. Jiang, C. Pan, K. Wang, P. Michiardi, O. A. Dobre, and M. Debbah, “From large ai models to agentic ai: A tutorial on future intelligent communications,”IEEE Journal on Selected Areas in Communications, vol. 44, pp. 3507–3540, 2026
2026
-
[9]
Generative ai-empowered signal processing for collaborative embodied agents: A survey on agentic secu- rity,
G. Pan, Y . Tao, Z. Yang, J. Li, Y . Peng, X. Bao, Y . Zhang, Z. Hua, S. Wang, R. Zhang, and C. Du, “Generative ai-empowered signal processing for collaborative embodied agents: A survey on agentic secu- rity,”IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 6741–6759, 2026
2026
-
[10]
Vla-adapter: An effective paradigm for tiny-scale vision-language-action model,
Y . Wang, P. Ding, L. Li, C. Cui, Z. Ge, X. Tong, W. Song, H. Zhao, W. Zhao, P. Houet al., “Vla-adapter: An effective paradigm for tiny-scale vision-language-action model,” inProceedings of the AAAI conference on artificial intelligence, vol. 40, no. 22, 2026, pp. 18 638– 18 646
2026
-
[11]
One-step diffusion with distribution matching distillation,
T. Yin, M. Gharbi, R. Zhang, E. Shechtman, F. Durand, W. T. Freeman, and T. Park, “One-step diffusion with distribution matching distillation,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 6613–6623
2024
-
[12]
Openvla: An open-source vision-language-action model,
M. J. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakrishna, S. Nair, R. Rafailov, E. P. Foster, P. R. Sanketi, Q. Vuonget al., “Openvla: An open-source vision-language-action model,” inConference on Robot Learning. PMLR, 2025, pp. 2679–2713
2025
-
[13]
Advancing open-source world models,
R. Team, Z. Gao, Q. Wang, Y . Zeng, J. Zhu, K. L. Cheng, Y . Li, H. Wang, Y . Xu, S. Maet al., “Advancing open-source world models,” arXiv preprint arXiv:2601.20540, 2026
Pith/arXiv arXiv 2026
-
[14]
Racevla: Vla-based racing drone navigation with human-like behaviour,
V . Serpiva, A. Lykov, A. Myshlyaev, M. H. Khan, A. A. Ab- dulkarim, O. Sautenkov, and D. Tsetserukou, “Racevla: Vla-based racing drone navigation with human-like behaviour,”arXiv preprint arXiv:2503.02572, 2025
arXiv 2025
-
[15]
Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collab- oration 0,
A. O’Neill, A. Rehman, A. Maddukuri, A. Gupta, A. Padalkar, A. Lee, A. Pooley, A. Gupta, A. Mandlekar, A. Jainet al., “Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collab- oration 0,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 6892–6903. BIOGRAPHIES Feibo Jiang(jiangfb@hunnu.e...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.