MPPI-based Informative Trajectory Planning for Search and Capture of Drifting Targets with ASVs
Pith reviewed 2026-06-27 09:35 UTC · model grok-4.3
The pith
MPPI control lets ASVs optimize long-horizon trajectories to search for and capture multiple drifting targets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
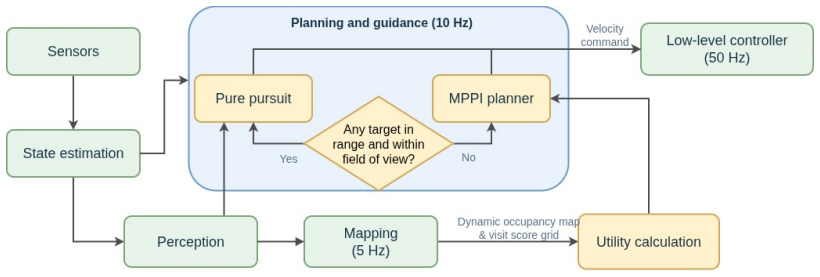
A spatiotemporal informative planning method based on model predictive path integral control directly generates kinematic-level commands by optimising continuous trajectories over long horizons. A multi-objective cost balances search and tracking objectives while ensuring safe, feasible trajectories. In the interception stage the system switches to a pure pursuit guidance controller for physical capture of moving targets.
What carries the argument
Model predictive path integral (MPPI) control, which samples candidate trajectories, evaluates them with a multi-objective cost that combines search information gain and target tracking error, and selects the lowest-cost sequence to produce control commands.
If this is right
- The planner produces feasible kinematic commands without an intermediate path-planning layer.
- Switching to pure pursuit at interception enables physical capture once a target is reached.
- The same framework applies to both environmental cleanup and search-and-rescue scenarios involving drifting objects.
- Field trials confirm the planner works on real ASVs in open water.
Where Pith is reading between the lines
- The approach could transfer to other vehicle types if their dynamics replace the ASV model inside the MPPI sampling step.
- Adding an energy or time cost term to the multi-objective function would let operators tune the planner for longer missions.
- If target motion models improve, longer planning horizons become viable without increasing prediction error.
Load-bearing premise
Drifting targets admit sufficiently accurate short-term motion predictions over the MPPI planning horizon so the cost function can trade off exploration versus tracking without rapid divergence from reality.
What would settle it
Run the planner on targets whose drift is deliberately made less predictable than the model assumes over the planning horizon and check whether capture success rate drops below the baselines.
Figures

read the original abstract
Autonomous surface vehicles offer an efficient solution for environmental cleanup as well as search and rescue operations in open waters. Targets in these settings drift continuously, so efficient search must balance exploration of unobserved regions with tracking of known targets. However, most target tracking and pursuit scenarios consider simple guidance behaviours and short-term predictions for decision-making. In this letter, we address the problem of search and capture of multiple drifting targets, such as litter, in dynamic environments, using a hybrid planning framework. A key aspect of our strategy is a spatiotemporal informative planning method based on model predictive path integral (MPPI) control, a sampling-based model predictive control approach. The planner directly generates kinematic-level commands by optimising continuous trajectories over long horizons. A multi-objective cost balances search and tracking objectives while ensuring safe, feasible trajectories. In the interception stage, we switch to a pure pursuit guidance controller for the physical capture of moving targets. Experiments show that our planner outperforms the chosen planning baselines. Finally, we validate our approach in field trials with an ASV.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to present a spatiotemporal informative planning method based on model predictive path integral (MPPI) control for search and capture of multiple drifting targets with autonomous surface vehicles (ASVs). The planner directly generates kinematic-level commands by optimizing continuous trajectories over long horizons using a multi-objective cost that balances search and tracking objectives while ensuring safe, feasible trajectories. It switches to a pure pursuit guidance controller for physical interception. Experiments are said to show outperformance over chosen planning baselines, with validation in field trials with an ASV.
Significance. If the results hold, the work offers a practical hybrid framework for balancing exploration and tracking in dynamic marine settings via sampling-based MPC. The long-horizon continuous trajectory optimization and direct kinematic command generation are practical strengths, and the field trials provide real-world grounding. The multi-objective cost formulation for trading off objectives is a potentially useful contribution to informative planning in robotics.
major comments (1)
- [Motion model for drifting targets and experimental validation sections] The central claim requires that short-term drift predictions for targets remain sufficiently accurate over the full MPPI planning horizon so that the multi-objective cost can meaningfully trade off exploration versus tracking. No independent validation of prediction error (e.g., position or velocity RMSE as a function of horizon length) or sensitivity analysis to realistic drift-model mismatch is reported. This is load-bearing for attributing any reported superiority over baselines to the planning method itself rather than to prediction quality.
minor comments (1)
- [Abstract] The abstract asserts outperformance and successful field trials but supplies no quantitative results, error bars, baseline details, or data exclusion criteria. Adding a concise statement of key metrics would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The major comment raises an important point about validating the underlying drift predictions, which we address directly below.
read point-by-point responses
-
Referee: [Motion model for drifting targets and experimental validation sections] The central claim requires that short-term drift predictions for targets remain sufficiently accurate over the full MPPI planning horizon so that the multi-objective cost can meaningfully trade off exploration versus tracking. No independent validation of prediction error (e.g., position or velocity RMSE as a function of horizon length) or sensitivity analysis to realistic drift-model mismatch is reported. This is load-bearing for attributing any reported superiority over baselines to the planning method itself rather than to prediction quality.
Authors: We agree that an explicit, independent validation of drift prediction accuracy over the planning horizon would strengthen attribution of performance gains to the MPPI planner. The current manuscript demonstrates end-to-end system performance in simulation and field trials but does not isolate prediction error metrics. In the revised manuscript we will add a dedicated subsection to the experimental validation section that reports position and velocity RMSE of the drift model as a function of horizon length, computed from the ASV field-trial data. We will also include a sensitivity analysis to realistic perturbations in the drift-model parameters. These additions will directly address the concern while preserving the existing results. revision: yes
Circularity Check
No significant circularity; derivation applies existing MPPI with novel cost and reports experimental comparison.
full rationale
The provided abstract and reader summary describe a hybrid planning framework that applies standard MPPI control to generate trajectories, augmented by a new multi-objective cost balancing search and tracking. No equations, fitted parameters, or self-citations are quoted that would reduce the claimed performance gains to quantities defined by the inputs themselves. The central result is presented as an application of an external method (MPPI) plus experimental validation against baselines, which is self-contained and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Plastic waste inputs from land into the ocean,
J. R. Jambeck, R. Geyer, C. Wilcox, T. R. Siegler, M. Perryman, A. Andrady, R. Narayan, and K. L. Law, “Plastic waste inputs from land into the ocean,”science, vol. 347, no. 6223, pp. 768–771, 2015
2015
-
[2]
Robots for environmental monitoring: Significant advancements and applications,
M. Dunbabin and L. Marques, “Robots for environmental monitoring: Significant advancements and applications,”IEEE Robot. & Automat. Mag., vol. 19, no. 1, pp. 24–39, 2012
2012
-
[3]
R. R. Murphy,Disaster robotics. MIT press, 2017
2017
-
[4]
Wireless sensor networks for environmental monitoring,
A. Lanzolla and M. Spadavecchia, “Wireless sensor networks for environmental monitoring,”Sensors, vol. 21, no. 4, 2021
2021
-
[5]
A survey on coverage path planning for robotics,
E. Galceran and M. Carreras, “A survey on coverage path planning for robotics,”Robot. and Auton. Sys., vol. 61, no. 12, pp. 1258–1276, 2013
2013
-
[6]
Multi-robot target detection and tracking: taxonomy and survey,
C. Robin and S. Lacroix, “Multi-robot target detection and tracking: taxonomy and survey,”Auton. Robots, vol. 40, pp. 729–760, 2016
2016
-
[7]
Spatio-temporal attention network for persistent monitoring of multiple mobile targets,
Y . Wang, Y . Wang, Y . Cao, and G. Sartoretti, “Spatio-temporal attention network for persistent monitoring of multiple mobile targets,” inProc. IEEE/RSJ Intl. Conf. on Intell. Robots and Sys. (IROS), 2023
2023
-
[8]
Hierarchical planning for long-horizon multi-target tracking under target motion uncertainty,
J. Yuan, B. Moon, M. Cao, and S. Scherer, “Hierarchical planning for long-horizon multi-target tracking under target motion uncertainty,” IEEE Robot. and Automat. Lett., vol. 10, no. 12, pp. 13 113–13 120, 2025
2025
-
[9]
Receding horizon
A. Bircher, M. Kamel, K. Alexis, H. Oleynikova, and R. Siegwart, “Receding horizon” next-best-view” planner for 3d exploration,” in Proc. IEEE Intl. Conf. on Robot. & Automat. (ICRA), 2016
2016
-
[10]
Sampling-based robotic infor- mation gathering algorithms,
G. A. Hollinger and G. S. Sukhatme, “Sampling-based robotic infor- mation gathering algorithms,”Intl. Journal of Robot. Research (IJRR), vol. 33, no. 9, pp. 1271–1287, 2014
2014
-
[11]
Information-theoretic planning with trajectory optimization for dense 3d mapping
B. Charrow, G. Kahn, S. Patil, S. Liu, K. Goldberg, P. Abbeel, N. Michael, and V . Kumar, “Information-theoretic planning with trajectory optimization for dense 3d mapping.” inProc. of Robot. Sci. & Sys (RSS), 2015
2015
-
[12]
Active mapping via gradient ascent optimization of shannon mutual information over continuous se (3) trajectories,
A. Asgharivaskasi, S. Koga, and N. Atanasov, “Active mapping via gradient ascent optimization of shannon mutual information over continuous se (3) trajectories,” inProc. IEEE/RSJ Intl. Conf. on Intell. Robots and Sys. (IROS), 2022
2022
-
[13]
Pampc: Perception- aware model predictive control for quadrotors,
D. Falanga, P. Foehn, P. Lu, and D. Scaramuzza, “Pampc: Perception- aware model predictive control for quadrotors,” inProc. IEEE/RSJ Intl. Conf. on Intell. Robots and Sys. (IROS), 2018. 1Video from field trial athttps://youtu.be/hfmq0VDAw6w
2018
-
[14]
On global optimization for informative path planning,
P. Bostr ¨om-Rost, D. Axehill, and G. Hendeby, “On global optimization for informative path planning,”IEEE Control Sys. Lett., vol. 2, no. 4, pp. 833–838, 2018
2018
-
[15]
Marine trash collection: A multi-agent, multi-target search,
P. Wang, M. Meghjani, and G. Chen, “Marine trash collection: A multi-agent, multi-target search,” inProc. MTS/IEEE OCEANS Hampton Roads, 2022
2022
-
[16]
Multi-object active search and tracking by multiple agents in untrusted, dynamically changing en- vironments,
M. Jeong, C. Molinaro, T. Deb, Y . Zhang, A. Pugliese, E. Santos, V . Subrahmanian, and A. Q. Li, “Multi-object active search and tracking by multiple agents in untrusted, dynamically changing en- vironments,”Auton. Robots, vol. 50, no. 1, p. 1, 2026
2026
-
[17]
Detecting, localizing, and tracking an unknown number of moving targets using a team of mobile robots,
P. Dames, P. Tokekar, and V . Kumar, “Detecting, localizing, and tracking an unknown number of moving targets using a team of mobile robots,”Intl. Journal of Robot. Research (IJRR), vol. 36, no. 13-14, pp. 1540–1553, 2017
2017
-
[18]
Target localization and pursuit with networked robotic vehicles: Theory, simulation, and experiments,
N. Hung, E. Cunha, F. Branco, and A. Pascoal, “Target localization and pursuit with networked robotic vehicles: Theory, simulation, and experiments,”Journal of Field Robot. (JFR), vol. 42, no. 5, pp. 2124– 2135, 2025
2025
-
[19]
Search and pursuit-evasion in mobile robotics: A survey,
T. H. Chung, G. A. Hollinger, and V . Isler, “Search and pursuit-evasion in mobile robotics: A survey,”Auton. Robots, vol. 31, no. 4, pp. 299– 316, 2011
2011
-
[20]
Op- timizing plastic waste collection in water bodies using heterogeneous autonomous surface vehicles with deep reinforcement learning,
A. M. Barrionuevo, S. Y . Luis, D. G. Reina, and S. L. T. Mar ´ın, “Op- timizing plastic waste collection in water bodies using heterogeneous autonomous surface vehicles with deep reinforcement learning,”IEEE Robot. and Automat. Lett., vol. 10, no. 5, pp. 4930–4937, 2025
2025
-
[21]
Sim-to-real transfer and robustness evaluation of reinforcement learning control with integrated perception on an asv for floating waste capture,
L. F. W. Batista, S. Aravecchia, and C. Pradalier, “Sim-to-real transfer and robustness evaluation of reinforcement learning control with integrated perception on an asv for floating waste capture,”IEEE Trans. on Field Robot., pp. 1–1, 2026
2026
-
[22]
Where to look next: Learning viewpoint rec- ommendations for informative trajectory planning,
M. Lodel, B. Brito, A. Serra-G ´omez, L. Ferranti, R. Babu ˇska, and J. Alonso-Mora, “Where to look next: Learning viewpoint rec- ommendations for informative trajectory planning,” inProc. IEEE Intl. Conf. on Robot. & Automat. (ICRA), 2022
2022
-
[23]
Multi-objective and model-predictive tree search for spatiotemporal informative planning,
W. Chen and L. Liu, “Multi-objective and model-predictive tree search for spatiotemporal informative planning,” inProc. Conf. on Decision Making and Control (CDC), 2019
2019
-
[24]
An informative planning framework for target tracking and active mapping in dynamic environments with asvs,
S. Ramkumar Sudha, M. Popovi ´c, and E. M. Coates, “An informative planning framework for target tracking and active mapping in dynamic environments with asvs,”IEEE Robot. and Automat. Lett., vol. 11, no. 3, pp. 2690–2697, 2026
2026
-
[25]
Information theoretic mpc for model-based reinforcement learning,
G. Williams, N. Wagener, B. Goldfain, P. Drews, J. M. Rehg, B. Boots, and E. A. Theodorou, “Information theoretic mpc for model-based reinforcement learning,” inProc. IEEE Intl. Conf. on Robot. & Automat. (ICRA), 2017
2017
-
[26]
Multi-agent path integral control for interaction-aware motion planning in urban canals,
L. Streichenberg, E. Trevisan, J. J. Chung, R. Siegwart, and J. Alonso- Mora, “Multi-agent path integral control for interaction-aware motion planning in urban canals,” inProc. IEEE Intl. Conf. on Robot. & Automat. (ICRA), 2023
2023
-
[27]
Pa-mppi: Perception-aware model predictive path integral control for quadrotor navigation in unknown environments,
Y . Zhai, R. Reiter, and D. Scaramuzza, “Pa-mppi: Perception-aware model predictive path integral control for quadrotor navigation in unknown environments,”IEEE Robot. and Automat. Lett., vol. 11, no. 3, pp. 3804–3811, 2026
2026
-
[28]
Drift in the uppermost part of the ocean,
J. R ¨ohrs and K. H. Christensen, “Drift in the uppermost part of the ocean,”Geophysical Research Lett., vol. 42, no. 23, pp. 10–349, 2015
2015
-
[29]
Tigris: An informed sampling-based algorithm for informative path planning,
B. Moon, S. Chatterjee, and S. Scherer, “Tigris: An informed sampling-based algorithm for informative path planning,” in Proc. IEEE/RSJ Intl. Conf. on Intell. Robots and Sys. (IROS), 2022
2022
-
[30]
An informative path planning framework for uav-based terrain monitoring,
M. Popovi ´c, T. Vidal-Calleja, G. Hitz, J. J. Chung, I. Sa, R. Siegwart, and J. Nieto, “An informative path planning framework for uav-based terrain monitoring,”Auton. Robots, vol. 44, no. 6, pp. 889–911, 2020
2020
-
[31]
Storm: An integrated framework for fast joint-space model-predictive control for reactive manipulation,
M. Bhardwaj, B. Sundaralingam, A. Mousavian, N. D. Ratliff, D. Fox, F. Ramos, and B. Boots, “Storm: An integrated framework for fast joint-space model-predictive control for reactive manipulation,” in Proc. of the Conf. on Robot Learning (CoRL), 2022
2022
-
[32]
Toward maritime robotic simu- lation in gazebo,
B. Bingham, C. Ag ¨uero, M. McCarrin, J. Klamo, J. Malia, K. Allen, T. Lum, M. Rawson, and R. Waqar, “Toward maritime robotic simu- lation in gazebo,” inProc. MTS/IEEE OCEANS SEATTLE, 2019
2019
-
[33]
Ship collision avoidance using scenario-based model predictive control,
T. A. Johansen, A. Cristofaro, and T. Perez, “Ship collision avoidance using scenario-based model predictive control,”IF AC-PapersOnLine, vol. 49, no. 23, pp. 14–21, 2016
2016
-
[34]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inProc. IEEE Intl. Symposium on Comput. Intell. in Robot. and Automat., 1997
1997
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.