Flyby Distance Pursuit for Guarding a Target with an Inferior Guard
Pith reviewed 2026-06-27 06:15 UTC · model grok-4.3
The pith
A slower guard can force capture of a faster attacker heading to a target when the attacker must arrive above a minimum speed.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Formulating the game with attacker termination at the target together with an auxiliary minimum-separation state removes a structural limitation of standard pursuit games, permits direct embedding of attacker mission constraints, and yields numerical solutions in which an attacker terminal-speed lower bound creates a trade-off between arrival speed and flyby distance that permits capture in a relevant portion of the parameter space.
What carries the argument
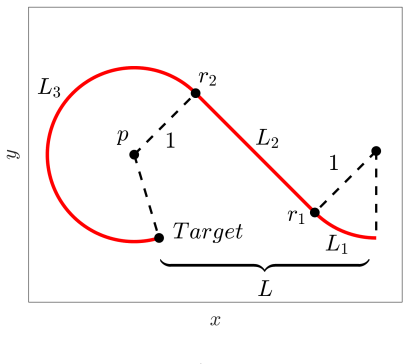
An auxiliary state variable that records the minimum separation distance between the players throughout their trajectories, making the flyby distance available as the game value at the instant the attacker reaches the target.
If this is right
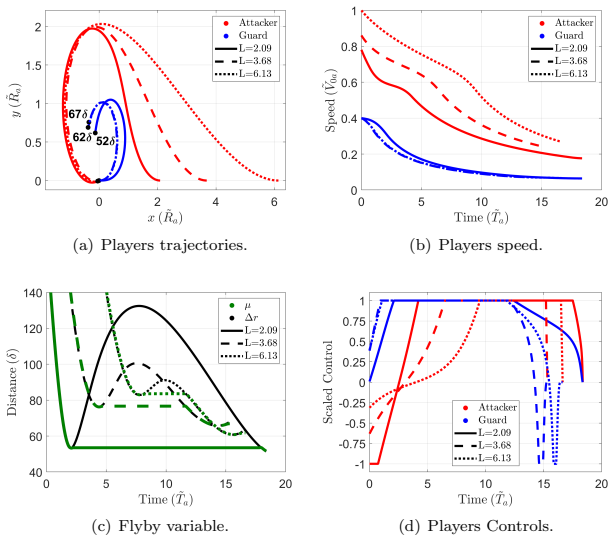
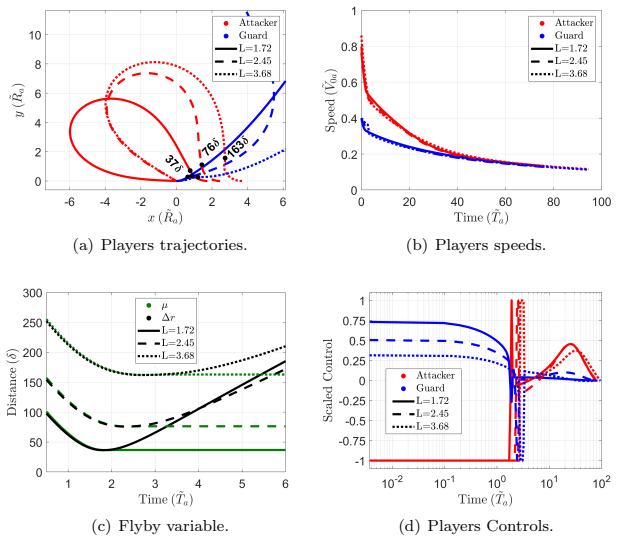
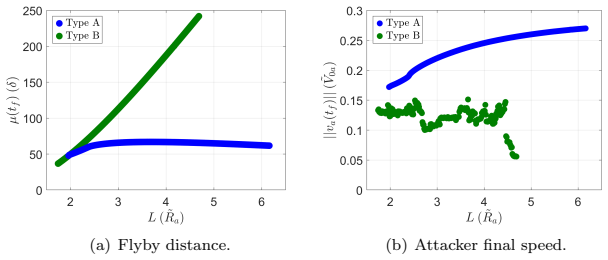
- When the attacker faces no terminal-speed requirement it can reach the target without capture, although the resulting trajectories have long durations and low terminal speeds.
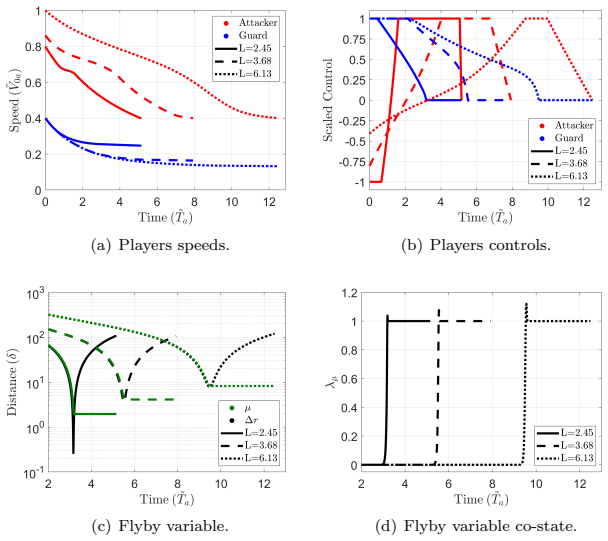
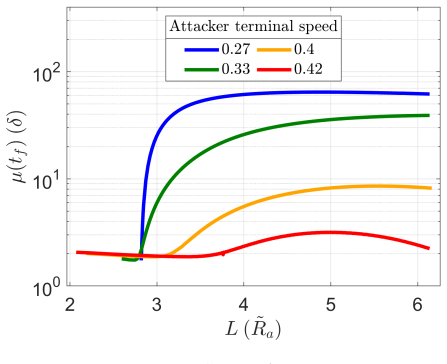
- Adding an attacker terminal-speed constraint produces simpler solution families and exposes an explicit trade-off between that speed and the achieved flyby distance.
- Capture becomes possible once the terminal-speed requirement is imposed, and the region of capturability occupies a relevant portion of the parameter space.
Where Pith is reading between the lines
- The same auxiliary-state construction can be used to embed other attacker mission constraints such as fuel or time limits without changing the underlying game structure.
- The numerically obtained solution families supply candidate feedback strategies that could be tested in higher-fidelity simulations that include wind or actuator limits.
- Extending the formulation to three-dimensional motion would test whether the observed trade-off between terminal speed and flyby distance persists outside the plane.
Load-bearing premise
The auxiliary minimum-separation state can be added to the differential game without altering the players' optimal strategies or introducing extra assumptions on information or control authority.
What would settle it
A set of converged numerical solutions to the two-point boundary-value problem, for the same initial conditions and terminal-speed bound used in the paper, that all produce strictly positive flyby distance.
Figures







read the original abstract
Guarding a target against a fast Attacker with a slower Guard is posed as a differential game. Both players follow nonlinear, thrust-free, aerodynamic motion in the plane. The capturability problem inherent in this scenario is addressed by formulating the game such that the Attacker is constrained to terminate at its Target, and the game value is the flyby distance. The latter is made accessible at termination by introducing an auxiliary state variable that records the players' minimum separation distance throughout their flight. This novel combination of termination condition and auxiliary state removes a structural limitation of current pursuit games and opens a new class of solvable problems. It also enables us to embed attacker mission constraints directly. Taking an indirect approach, we formulate the game's Two-Point Boundary Value Problem, solve it numerically, and identify several solution types. When the Attacker's only constraint is to reach the Target, he can do so without being captured. These types of solutions, however, are less practical due to long flight times and slow terminal speeds. Imposing an Attacker terminal speed constraint yields simpler solutions and reveals the trade-off between terminal speed and flyby distance. We demonstrate that in such a setting, capture is possible in a relevant region of the parameter space.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates guarding a target against a faster Attacker using a slower Guard as a differential game with nonlinear thrust-free aerodynamic dynamics in the plane. The Attacker is constrained to terminate at the Target, the payoff is the minimum flyby distance, and an auxiliary state variable is introduced to record the running minimum separation so that the value is available at termination. An indirect method yields the TPBVP, which is solved numerically to classify solution families; without a terminal-speed constraint the Attacker reaches the Target without capture (but with long flight times and low terminal speeds), while a terminal-speed constraint produces simpler trajectories and a nonempty capture region in parameter space.
Significance. If the auxiliary-state construction preserves the original saddle strategies, the approach removes a structural limitation of standard pursuit games and directly embeds mission constraints, yielding a new class of solvable problems with concrete numerical evidence of capture regions under speed limits.
major comments (2)
- [Formulation and auxiliary state (near Eq. for ˙m)] The auxiliary dynamics (typically ˙m = min(0, separation rate) or smoothed equivalent) are non-Lipschitz; the manuscript must explicitly verify (in the section deriving the Hamiltonian or the TPBVP) that this augmentation leaves the optimal strategies of both players unchanged and does not impose new observability or control-authority assumptions relative to the unaugmented game.
- [Numerical results and solution families] The numerical TPBVP solver is used to identify capture regions under the terminal-speed constraint, yet no convergence diagnostics, validation against known analytic cases, or parameter-sensitivity results are reported; without these the claim that capture occurs in a relevant region of parameter space cannot be assessed.
minor comments (2)
- [Abstract] The abstract states that 'several solution types' are identified but does not name them; a brief enumeration in the introduction would improve readability.
- [Problem formulation] Notation for the auxiliary minimum-separation variable and its terminal condition should be introduced once and used consistently; occasional redefinition risks confusion.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable comments. We address each major comment below and will incorporate the suggested clarifications and additions in a revised manuscript.
read point-by-point responses
-
Referee: [Formulation and auxiliary state (near Eq. for ˙m)] The auxiliary dynamics (typically ˙m = min(0, separation rate) or smoothed equivalent) are non-Lipschitz; the manuscript must explicitly verify (in the section deriving the Hamiltonian or the TPBVP) that this augmentation leaves the optimal strategies of both players unchanged and does not impose new observability or control-authority assumptions relative to the unaugmented game.
Authors: We agree that an explicit verification is warranted given the non-Lipschitz character of the auxiliary dynamics. In the revised manuscript we will add a subsection immediately following the Hamiltonian derivation that demonstrates the augmentation does not alter the players' optimal strategies. Because the auxiliary state m is a passive, non-decreasing recorder whose dynamics do not enter the Hamiltonian or the optimality conditions for the controls, the saddle-point strategies of the original game are recovered unchanged; no additional observability or control-authority assumptions are introduced. revision: yes
-
Referee: [Numerical results and solution families] The numerical TPBVP solver is used to identify capture regions under the terminal-speed constraint, yet no convergence diagnostics, validation against known analytic cases, or parameter-sensitivity results are reported; without these the claim that capture occurs in a relevant region of parameter space cannot be assessed.
Authors: We accept that additional numerical validation is required to substantiate the reported capture regions. The revised manuscript will include (i) convergence diagnostics (residual norms and mesh-refinement studies) for the TPBVP solver, (ii) validation against limiting analytic cases (e.g., equal-speed or infinite-guard-speed limits where capture boundaries are known), and (iii) parameter-sensitivity sweeps over speed ratio and initial geometry to quantify the robustness of the identified capture set. revision: yes
Circularity Check
No circularity: standard state augmentation for min-distance payoff
full rationale
The derivation introduces an auxiliary state to record minimum separation so that the flyby distance becomes the terminal payoff of the TPBVP. This is a conventional optimal-control technique that does not define the payoff in terms of itself or rename a fitted quantity as a prediction. The paper solves the resulting boundary-value problem numerically, identifies solution families, and reports capture regions under an added terminal-speed constraint; none of these steps reduce by construction to the inputs or to a self-citation chain. The central claim therefore remains independent of the formulation choices.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Balakrishnan, Antonios Tsourdos, and Brian A
Sivasubramanya N. Balakrishnan, Antonios Tsourdos, and Brian A. White, editors.Advances in missile guidance, control, and estimation. Automation and control engineering. CRC Press, Boca Raton, Fla., 2013
2013
-
[2]
published in 1995 by Academic Press, New York
Tamer Ba¸ sar and Geert Jan Olsder.Dynamic noncooperative game theory: Revised from the 2nd ed. published in 1995 by Academic Press, New York. Number 23 in Classics in applied mathematics. Society for Industrial and Applied Mathematics (SIAM, 3600 Market Street, Floor 6, Philadelphia, PA 19104), Philadelphia, Pa, 2nd ed edition, 1999
1995
-
[3]
Victor M. Becerra. Solving complex optimal control problems at no cost with PSOPT. In2010 IEEE International Symposium on Computer-Aided Control System Design, pages 1391–1396, 2010
2010
-
[4]
Release 5, 2020
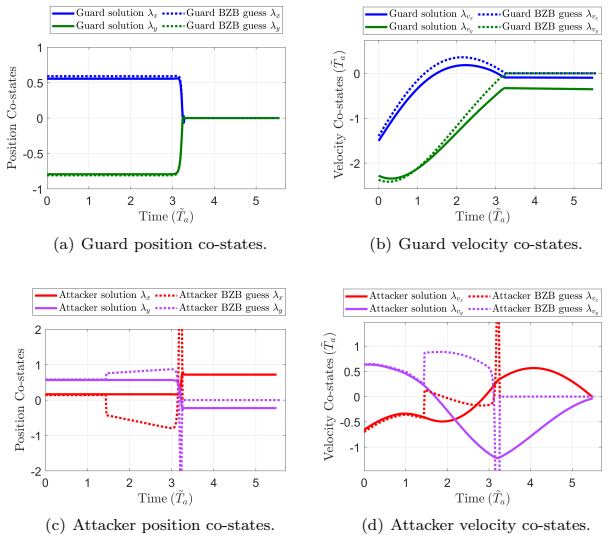
Victor M Becerra.PSOPT Optimal Control Solver User Manual. Release 5, 2020. Available athttps://github.com/PSOPT/psopt/blob/master/ doc/. 25 (a) Guard position co-states. (b) Guard velocity co-states. (c) Attacker position co-states. (d) Attacker velocity co-states. Figure 14: BZB co-states guess comparison with FBDP solution
2020
-
[5]
Ben-Asher and Isaac Yaesh.Advances in missile guidance the- ory
Joseph Z. Ben-Asher and Isaac Yaesh.Advances in missile guidance the- ory. Number 180 in Progress in astronautics and aeronautics. American Institute of Aeronautics and Astronautics, Reston, Va, 1998
1998
-
[6]
Betts.Practical methods for optimal control and estimation using nonlinear programming
John T. Betts.Practical methods for optimal control and estimation using nonlinear programming. Number 19 in Advances in design and control. Society for Industrial and Applied Mathematics, Philadelphia, Pa, 2. ed edition, 2010
2010
-
[7]
Taylor & Francis Group, New York Oxon, 1975
Arthur Earl Bryson and Yu-Chi Ho.Applied optimal control: optimization, estimation, and control. Taylor & Francis Group, New York Oxon, 1975
1975
-
[8]
Carr, Richard G
Ryan W. Carr, Richard G. Cobb, Meir Pachter, and Scott Pierce. Solution of a Pursuit–Evasion Game Using a Near-Optimal Strategy.Journal of Guidance, Control, and Dynamics, 41(4):841–850, 2018
2018
-
[9]
Number 209 in Progress in astronautics and aeronautics
Shaul Gutman.Applied min-max approach to missile guidance and control. Number 209 in Progress in astronautics and aeronautics. American Inst. of Aeronautics and Astronautics, Reston, Va, 2005. 26
2005
-
[10]
Kazuhiro Horie and Bruce A. Conway. Optimal Fighter Pursuit-Evasion Maneuvers Found Via Two-Sided Optimization.Journal of Guidance, Con- trol, and Dynamics, 29(1):105–112, 2006
2006
-
[11]
Dover Publica- tions, Mineola, NY, 1999
Rufus Philip Isaacs.Differential games: a mathematical theory with appli- cations to warfare and pursuit, control and optimization. Dover Publica- tions, Mineola, NY, 1999
1999
-
[12]
Meir Pachter, Eloy Garcia, and David W. Casbeer. Differential Game of Guarding a Target.Journal of Guidance, Control, and Dynamics, 40(11):2991–2998, 2017
2017
-
[13]
Capture Set Computation of an Optimally Guided Missile
Tuomas Raivio. Capture Set Computation of an Optimally Guided Missile. Journal of Guidance, Control, and Dynamics, 24(6):1167–1175, 2001
2001
-
[14]
Tauqeer ul Islam Rizvi, Lin-shu He, and Da-jun Xu
S. Tauqeer ul Islam Rizvi, Lin-shu He, and Da-jun Xu. Optimal trajectory and heat load analysis of different shape lifting reentry vehicles for medium range application.Defence Technology, 11(4):350–361, 2015. 27
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.