Surrogate Assisted Pedestrian Protection Design via a Foundation Model Orchestrated Workflow
Pith reviewed 2026-06-27 01:22 UTC · model grok-4.3
The pith
A foundation model orchestrates surrogates and evolutionary search to generate dozens of pedestrian-safe bumper designs from one run instead of weeks of manual iteration.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
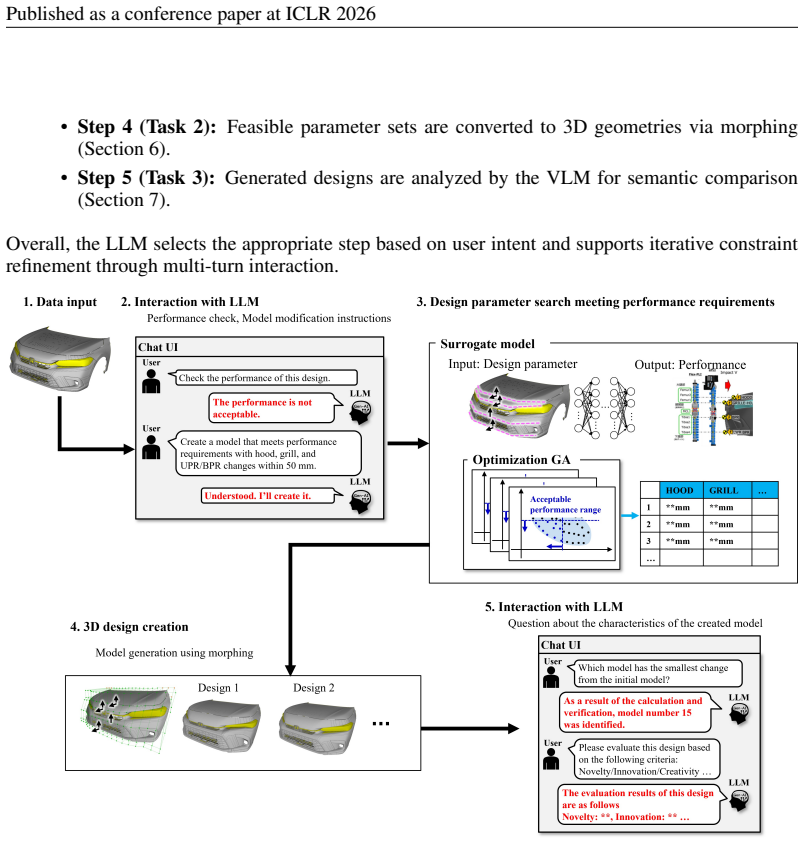
The foundation model-orchestrated workflow combines a surrogate achieving average R²=0.87 with conformal prediction intervals, NSGA-II multiobjective search, a morphing geometry generator, and natural-language orchestration to produce 35 distinct safety-compliant front-bumper designs in a single automated exploration that would otherwise require weeks of conventional CAE iteration.
What carries the argument
The foundation model-orchestrated workflow that links the trained surrogate predictor, NSGA-II search, morphing geometry generator, and LLM-driven interface to enable surrogate-assisted design exploration.
If this is right
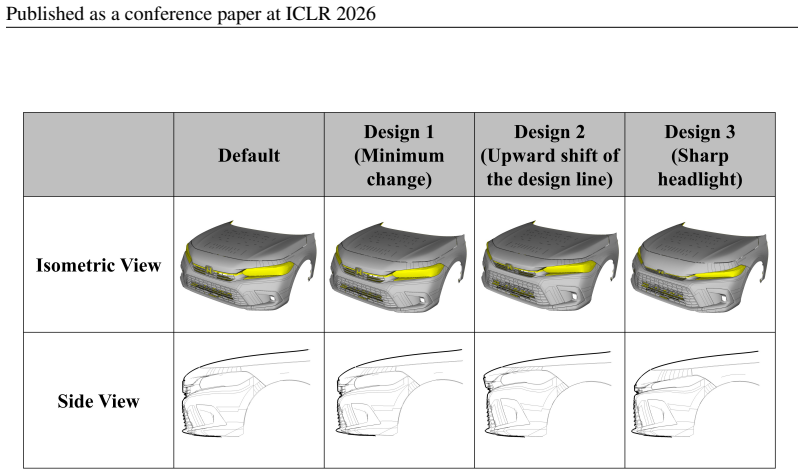
- The workflow produces 35 distinct safety-compliant design alternatives from a single exploration run.
- Evaluation time drops from hours per CAE simulation to seconds per surrogate query.
- Foundation models can act as integration layers between ML surrogates and physics-based simulation in safety-critical domains.
- An LLM natural-language interface plus vision-language comparison supports semantic review of generated geometries.
Where Pith is reading between the lines
- The same orchestration pattern could shorten iteration cycles in other engineering problems that combine nonlinear simulation with multiobjective constraints.
- Conformal intervals may allow engineers to set risk thresholds when accepting surrogate-guided designs without exhaustive re-simulation.
- Extending the geometry generator to additional vehicle subsystems would test whether the workflow scales beyond the front-bumper case.
Load-bearing premise
The surrogate's average R squared of 0.87 together with its conformal prediction intervals remains accurate enough that the parameter sets returned by the search still satisfy injury constraints when re-checked with full nonlinear CAE contact simulations.
What would settle it
Re-evaluate the 35 generated designs with the original high-fidelity CAE simulations and check whether their actual injury metrics fall inside the conformal prediction intervals and meet the user-specified constraints.
Figures


read the original abstract
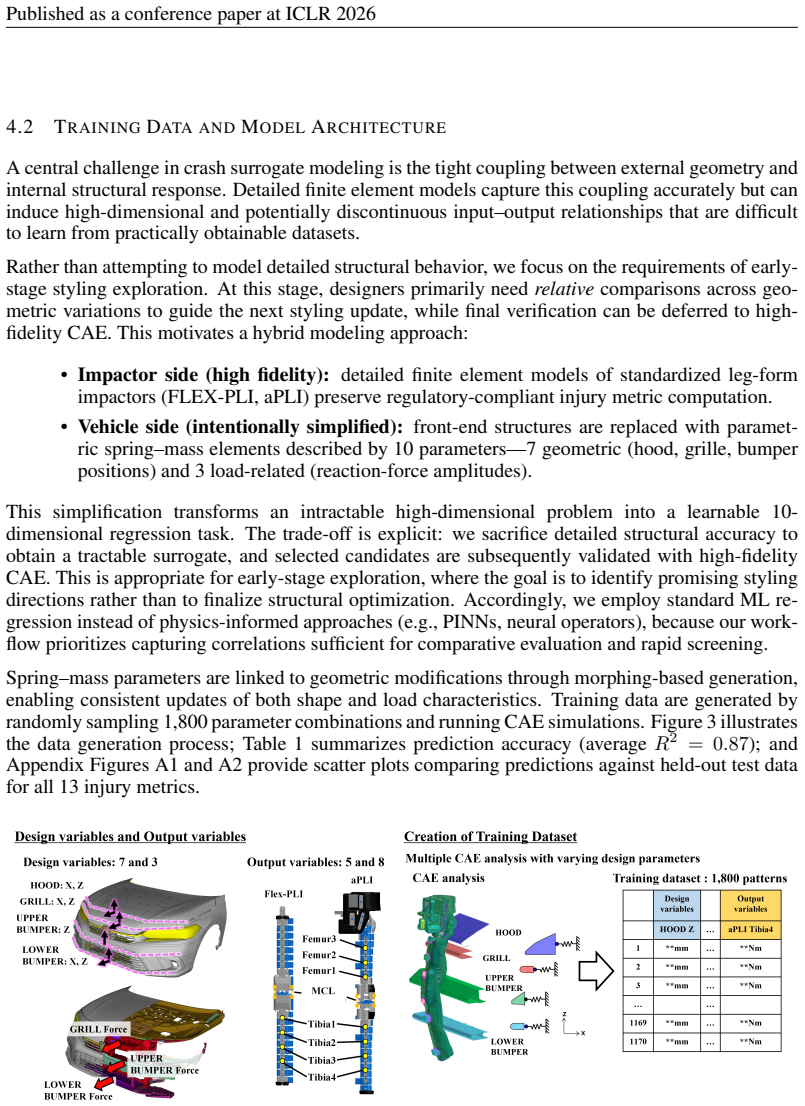
AI-driven engineering workflows face particular challenges in crash safety design: unlike aerodynamics, crash events involve highly nonlinear contact dynamics, material nonlinearity, and discrete state transitions that are difficult to capture with data-driven surrogate models. To the best of our knowledge, we present the first foundation model--orchestrated workflow for crash safety design that enables surrogate-assisted exploration for pedestrian protection, reducing evaluation time from hours per CAE simulation to seconds. The workflow integrates four components: (1) a surrogate trained on CAE crash simulations to predict pedestrian leg injury metrics from design parameters, achieving an average $R^2=0.87$ and providing distribution-free conformal prediction intervals; (2) multiobjective evolutionary search (NSGA-II) to discover diverse feasible parameter sets under user-specified constraints; (3) a morphing-based geometry generator that maps parameters to topology-preserving 3D shapes; and (4) a natural-language interface in which an LLM orchestrates the workflow and a vision--language model supports semantic comparison of generated designs. In an automotive front-bumper case study, the workflow produces 35 distinct safety-compliant alternatives from a single exploration, a process that would require weeks with conventional CAE iteration. These results suggest that foundation models can serve as integration layers between ML surrogates and physics-based simulation, helping bring AI capabilities to safety-critical engineering domains.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a foundation model-orchestrated workflow for surrogate-assisted multi-objective optimization in pedestrian protection crash safety design. It combines a surrogate model (average R²=0.87 with conformal prediction intervals) trained on CAE simulations, NSGA-II search under constraints, a morphing-based geometry generator, and LLM/VLM components for orchestration and semantic comparison. The central result is the generation of 35 distinct safety-compliant front-bumper designs from a single exploration, claimed to reduce evaluation time from hours per CAE run to seconds.
Significance. If the surrogate-guided designs are shown to remain feasible under full nonlinear CAE re-evaluation, the work would illustrate a viable integration layer for foundation models between data-driven surrogates and physics-based simulation in safety-critical domains, addressing the challenges of nonlinear contact dynamics that standard surrogates struggle with.
major comments (2)
- [Abstract] Abstract and workflow description: the headline claim that the workflow produces 35 safety-compliant alternatives rests on the surrogate (R²=0.87 plus conformal intervals) guiding NSGA-II to feasible points, yet the manuscript reports no post-optimization CAE verification campaign on these 35 designs using the original nonlinear contact solver. Crash problems involve sharp state transitions; without this check the practical correctness of the discovered set remains unverified.
- [Methods (surrogate)] Surrogate model section: no training-set size, cross-validation procedure, or hold-out performance details are supplied beyond the average R²=0.87, leaving unclear whether the model generalizes sufficiently near constraint boundaries for the evolutionary search to be reliable.
minor comments (1)
- [Abstract] The 'first' claim in the abstract would benefit from a concise literature positioning paragraph to substantiate novelty relative to prior surrogate-assisted crash design studies.
Simulated Author's Rebuttal
We thank the referee for the constructive and insightful comments on our manuscript. We address each major comment below and will revise the paper accordingly to improve clarity and rigor.
read point-by-point responses
-
Referee: [Abstract] Abstract and workflow description: the headline claim that the workflow produces 35 safety-compliant alternatives rests on the surrogate (R²=0.87 plus conformal intervals) guiding NSGA-II to feasible points, yet the manuscript reports no post-optimization CAE verification campaign on these 35 designs using the original nonlinear contact solver. Crash problems involve sharp state transitions; without this check the practical correctness of the discovered set remains unverified.
Authors: We agree that the absence of post-optimization verification with the full nonlinear CAE solver is a limitation, particularly given the nonlinear contact dynamics and potential sharp state transitions in crash problems. The current claims rely on the surrogate predictions (including conformal intervals) to identify feasible designs. In the revised manuscript, we will add a dedicated verification section reporting results from re-evaluating the 35 designs (or a representative subset) using the original CAE solver to confirm compliance and quantify any surrogate prediction errors. revision: yes
-
Referee: [Methods (surrogate)] Surrogate model section: no training-set size, cross-validation procedure, or hold-out performance details are supplied beyond the average R²=0.87, leaving unclear whether the model generalizes sufficiently near constraint boundaries for the evolutionary search to be reliable.
Authors: We acknowledge that these details were omitted from the surrogate model description. The revised manuscript will explicitly report the training-set size (number of CAE simulations), the cross-validation procedure (e.g., k-fold details), and additional hold-out test performance metrics. This will include analysis of performance near constraint boundaries to better substantiate the reliability of the NSGA-II optimization. revision: yes
Circularity Check
No circularity: workflow integrates external standard components without self-referential reduction
full rationale
The manuscript presents an engineering workflow that chains a trained surrogate (R²=0.87), NSGA-II, a morphing generator, and LLM orchestration to produce design candidates. No equations define any quantity in terms of itself, no fitted parameter is relabeled as an independent prediction, and no load-bearing premise rests on a self-citation chain. The headline result (35 compliant designs) is an empirical output of the described pipeline rather than a quantity forced by construction from its inputs. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[2]
Christopher Baker, Karen Rafferty, and Mark Price
URL https://arxiv.org/abs/2107.07511. Christopher Baker, Karen Rafferty, and Mark Price. Large language models in mechanical engi- neering: A scoping review of applications, challenges, and future directions.Big Data and Cog- nitive Computing, 9(12):305,
-
[3]
URLhttps://doi.org/ 10.3390/bdcc9120305
doi: 10.3390/bdcc9120305. URLhttps://doi.org/ 10.3390/bdcc9120305. Wei Chen and Arun Ramamurthy. Deep generative model for efficient 3d airfoil parameterization and generation,
-
[4]
Kalyanmoy Deb, Amrit Pratap, Sameer Agarwal, and T
URLhttps://arxiv.org/abs/2101.02744. Kalyanmoy Deb, Amrit Pratap, Sameer Agarwal, and T. Meyarivan. A fast and elitist multiobjective genetic algorithm: NSGA-II.IEEE Transactions on Evolutionary Computation, 6(2):182–197, April
-
[5]
doi: 10.1109/4235.996017. URLhttps://doi.org/10.1109/4235.996017. Osamu Ito, Jun Shiraishi, Kazuo Imura, Takeshi Yamatoda, and Yasuhiro Kumatani. Prediction of pedestrian protection performance using machine learning. InProceedings of the 26th Interna- tional Technical Conference on the Enhanced Safety of V ehicles (ESV), pp. 1–10,
-
[6]
URLhttps://doi.org/10.1007/ s00158-024-03771-5
doi: 10.1007/s00158-024-03771-5. URLhttps://doi.org/10.1007/ s00158-024-03771-5. Published: 26 February
-
[7]
Jones, Matthias Schonlau, and William J
doi: 10.1023/A:1008306431147. URLhttps://doi.org/10.1023/A:1008306431147. Bharat Kaushik, P. Daphal, P. Khare, and S. Koralla. Pedestrian safety performance prediction using machine learning techniques. SAE Technical Paper 2021-26-0026, SAE International,
-
[8]
Jonas Kneifl, J ¨org Fehr, Steven L
URL https://doi.org/10.4271/2021-26-0026. Jonas Kneifl, J ¨org Fehr, Steven L. Brunton, and J. Nathan Kutz. Multi-hierarchical surrogate learning for explicit structural dynamical systems using graph convolutional neural networks. Computational Mechanics, 75:1115–1135,
-
[9]
doi: 10.1007/s00466-024-02553-6. URL https://doi.org/10.1007/s00466-024-02553-6. Haoran Li, Yingxue Zhao, Haosu Zhou, Tobias Pfaff, and Nan Li. A new graph-based surrogate model for rapid prediction of crashworthiness performance of vehicle panel components, 2025a. URLhttps://arxiv.org/abs/2503.17386. Jiahui Li, Haodong Wei, Chenhui Yang, Yihang Liu, Ruiy...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1007/s00466-024-02553-6
-
[10]
Alexandre Picard, Simon Lafleur, Arnaud Gros, Ayelet Bessissow, and Florence Petit
URLhttps://arxiv.org/abs/2510.15201. Alexandre Picard, Simon Lafleur, Arnaud Gros, Ayelet Bessissow, and Florence Petit. From con- cept to manufacturing: Evaluating vision-language models for engineering design,
- [11]
-
[12]
11 Published as a conference paper at ICLR 2026 Thomas W
URL https://ntrs.nasa.gov/citations/19990050940. 11 Published as a conference paper at ICLR 2026 Thomas W. Sederberg and Scott R. Parry. Free-form deformation of solid geometric models. In Proceedings of SIGGRAPH, pp. 151–160,
arXiv 2026
-
[13]
URLhttps: //arxiv.org/abs/2509.12224. AUTHORCONTRIBUTIONS Osamu Ito (corresponding author) conceived the project, designed the workflow, implemented the surrogate modeling and optimization pipeline, and wrote the manuscript. Akihiko Katagiri, Yoshikazu Nakagawa, Shin Saeki, Jun Shiraishi, and Masato Sasaki contributed to discussions, pro- vided domain exp...
arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.