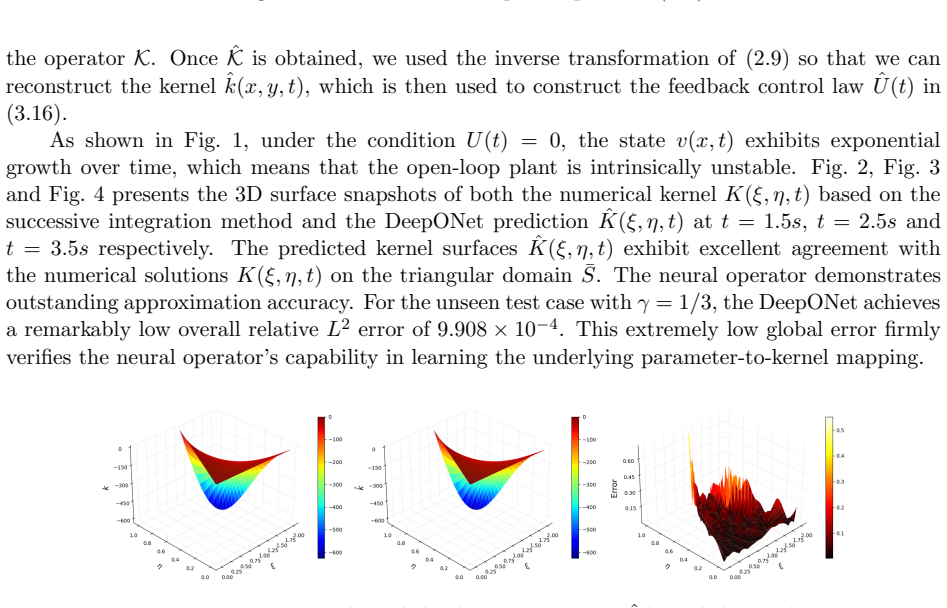
Operator Learning for PDE Backstepping Control of Parabolic Equations on Time-Varying Domains
Pith reviewed 2026-06-26 23:39 UTC · model grok-4.3
The pith
A neural operator approximates the time-varying backstepping kernel to stabilize parabolic PDEs on moving domains with exponential decay on finite intervals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The time-varying backstepping design is recast as an operator from the moving-boundary trajectory to the kernel function; after a fixed-domain transformation that establishes continuous dependence, a neural operator approximation of this map produces a feedback law under which the closed-loop parabolic system decays exponentially on every finite time interval.
What carries the argument
The backstepping kernel operator, approximated via DeepONet after mapping the time-varying domain to a fixed reference domain.
If this is right
- The closed-loop system admits an exponential decay estimate on any prescribed finite time interval.
- Online kernel generation accelerates by nearly three orders of magnitude compared with repeated numerical solves of the kernel PDE.
- Real-time boundary feedback stabilization becomes feasible for parabolic systems whose spatial domain changes with time.
Where Pith is reading between the lines
- The same fixed-domain mapping plus operator learning could reduce computation in other parameter-dependent PDE control designs where kernels must be recomputed online.
- Hardware-in-the-loop tests on physical systems with deforming domains would directly check whether the observed speedup translates to closed-loop performance under sensor noise and actuator limits.
- Extending the operator input to include additional parameters such as variable coefficients could broaden the approach beyond pure domain motion.
Load-bearing premise
The continuous dependence of the kernel on the boundary trajectory is strong enough that the neural approximation error still preserves the exponential decay property of the exact backstepping controller.
What would settle it
A simulation or experiment in which the closed-loop state fails to exhibit the predicted exponential decay rate when the neural operator is used in place of the exact kernel would falsify the claim.
Figures





read the original abstract
This paper develops a learning-based boundary control framework for stabilizing a parabolic equation defined on time-varying spatial domain. Although the partial differential equation (PDE) backstepping method provides a systematic theoretical framework for such moving-boundary systems, its real-time implementation is hindered by the need to repeatedly solve time-varying kernel PDEs on evolving domains. To overcome this limitation, we first formulate the time-varying backstepping design as an operator that maps the moving-boundary trajectory to the corresponding backstepping kernel. By mapping the time-varying domain of the backstepping kernel equation onto a fixed reference domain, we establish the continuous dependence of the kernel on the moving-boundary trajectory, which provides the theoretical basis for approximating the backstepping design operator by a neural operator. Based on the approximate kernel operator, we construct the corresponding boundary feedback controller to stabilize the system. It is shown that the closed-loop system admits an exponential decay estimate on any prescribed finite time interval. For numerical implementation, DeepONet is employed to learn the time-varying kernel operator from offline-generated numerical kernel solutions and is subsequently deployed online to generate the required time-varying kernels without repeatedly solving the kernel PDE. Numerical benchmarks demonstrate that the proposed neural-operator-based implementation bypasses repeated online solution of the time-varying kernel PDE, achieves a significant acceleration of close to three orders of magnitude compared with conventional numerical kernel solvers, and thus enables real-time stabilization of the system on time-varying spatial domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops an operator-learning framework for boundary feedback stabilization of a parabolic PDE on a time-varying spatial domain. It reformulates the backstepping kernel design as an operator from the moving-boundary trajectory to the kernel, establishes continuous dependence of this operator via a fixed-reference-domain mapping, approximates the operator with DeepONet trained offline on numerical kernel solutions, and claims that the resulting approximate feedback yields an exponential decay estimate for the closed-loop system on any prescribed finite interval [0,T]. Numerical examples report a computational speedup of nearly three orders of magnitude relative to repeated online solution of the time-varying kernel PDE.
Significance. If the stability claim with the learned kernel holds, the work provides a practical route to real-time backstepping control for moving-boundary parabolic systems by eliminating repeated kernel PDE solves. The fixed-domain mapping that yields continuous dependence of the kernel operator is a clear technical strength, as is the explicit numerical acceleration result. These elements together address a recognized implementation barrier in the field.
major comments (2)
- [§3] §3 (stability theorem for approximate kernel): the argument that the neural-operator approximation preserves the exponential decay estimate on [0,T] invokes continuous dependence of the kernel on the trajectory but supplies no quantitative modulus of continuity or explicit stability margin relating the approximation error ||K_approx - K|| (in the norm used for the target-system perturbation) to the allowable residual that keeps the decay rate positive. Without this bound the link from offline DeepONet training to the claimed closed-loop decay remains unsecured.
- [§4] §4 (numerical validation): the reported closed-loop simulations do not quantify the realized DeepONet approximation error in the same norm appearing in the stability proof, nor do they show how that error affects the observed decay rate across different trajectories; this leaves the practical margin between training accuracy and theoretical requirement unverified.
minor comments (3)
- [Abstract] Abstract: the statement of the exponential decay estimate should specify the norm and whether the decay rate depends on the length of the interval [0,T].
- [§2] Notation: the mapping from the time-varying domain to the fixed reference domain is introduced without a dedicated symbol; consistent notation would improve readability when the operator is later approximated.
- [Figures 3-5] Figure captions: several figures comparing kernel solutions lack error bars or quantitative L^2 or L^∞ discrepancy values between the DeepONet output and the reference solver.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and positive assessment of the significance of the work. We address the major comments point by point below.
read point-by-point responses
-
Referee: [§3] §3 (stability theorem for approximate kernel): the argument that the neural-operator approximation preserves the exponential decay estimate on [0,T] invokes continuous dependence of the kernel on the trajectory but supplies no quantitative modulus of continuity or explicit stability margin relating the approximation error ||K_approx - K|| (in the norm used for the target-system perturbation) to the allowable residual that keeps the decay rate positive. Without this bound the link from offline DeepONet training to the claimed closed-loop decay remains unsecured.
Authors: We agree that the stability theorem invokes the established continuous dependence of the kernel operator (via the fixed-reference-domain mapping) without supplying an explicit modulus of continuity or a quantitative stability margin that directly relates the approximation error in the target-system norm to a positive decay rate. The current argument guarantees that sufficiently accurate approximations preserve the exponential decay on any fixed [0,T], but does not quantify the allowable residual. We will add a remark or auxiliary lemma in the revised manuscript that derives a modulus of continuity for the kernel operator and an explicit margin relating the perturbation size to the decay rate on [0,T]. revision: yes
-
Referee: [§4] §4 (numerical validation): the reported closed-loop simulations do not quantify the realized DeepONet approximation error in the same norm appearing in the stability proof, nor do they show how that error affects the observed decay rate across different trajectories; this leaves the practical margin between training accuracy and theoretical requirement unverified.
Authors: The numerical section demonstrates stabilization and the reported speedup using the learned kernels, but does not report the approximation error in the precise norm appearing in the stability proof nor explicitly correlate that error with observed decay rates across trajectories. We will revise the numerical examples to include the kernel approximation errors measured in the relevant norm from the proof, together with comparisons of realized versus theoretical decay rates for multiple trajectories, thereby verifying the practical margin between training accuracy and the theoretical requirement. revision: yes
Circularity Check
No significant circularity; derivation relies on standard backstepping plus operator approximation without reduction to inputs by construction
full rationale
The paper maps the time-varying kernel PDE to a fixed domain to establish continuous dependence of the kernel on the boundary trajectory, then trains a neural operator (DeepONet) offline on numerical solutions of that operator and deploys it for real-time feedback. The exponential decay claim for the closed-loop system with the approximate kernel is asserted after constructing the controller from the learned operator, but the provided text contains no equations or steps where a stability estimate is obtained by fitting a parameter to the target data or by renaming the training input as a prediction. No self-citation chains, uniqueness theorems imported from the authors' prior work, or ansatzes smuggled via citation appear in the abstract or description. The central claim therefore remains independent of the fitted values and does not reduce to its own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- DeepONet weights and biases
axioms (1)
- domain assumption Continuous dependence of the backstepping kernel on the moving-boundary trajectory after fixed-reference-domain mapping
Reference graph
Works this paper leans on
-
[1]
Computation of empirical eigenfunctions and order reduction for nonlinear parabolic PDE systems with time-dependent spatial domains
Antonios Armaou and Panagiotis D Christofides. Computation of empirical eigenfunctions and order reduction for nonlinear parabolic PDE systems with time-dependent spatial domains. Nonlinear Analysis, Theory, Methods and Applications, 47(4):2869–2874, 2001
2001
-
[2]
Neural operators for bypassing gain and control computations in PDE backstepping.IEEE Transactions on Automatic Control, 69(8):5310–5325, 2023
Luke Bhan, Yuanyuan Shi, and Miroslav Krstic. Neural operators for bypassing gain and control computations in PDE backstepping.IEEE Transactions on Automatic Control, 69(8):5310–5325, 2023
2023
-
[3]
Operator learning for nonlinear adaptive control
Luke Bhan, Yuanyuan Shi, and Miroslav Krstic. Operator learning for nonlinear adaptive control. InLearning for dynamics and control conference, pages 346–357. PMLR, 2023
2023
-
[4]
American Mathematical Soc., 2007
Jean-Michel Coron.Control and nonlinearity. American Mathematical Soc., 2007
2007
-
[5]
Ap- proximation rates of deeponets for learning operators arising from advection–diffusion equa- tions.Neural Networks, 153:411–426, 2022
Beichuan Deng, Yeonjong Shin, Lu Lu, Zhongqiang Zhang, and George Em Karniadakis. Ap- proximation rates of deeponets for learning operators arising from advection–diffusion equa- tions.Neural Networks, 153:411–426, 2022
2022
-
[6]
Boundary time- varying feedbacks for fixed-time stabilization of constant-parameter reaction–diffusion systems
Nicol´ as Espitia, Andrey Polyakov, Denis Efimov, and Wilfrid Perruquetti. Boundary time- varying feedbacks for fixed-time stabilization of constant-parameter reaction–diffusion systems. Automatica, 103:398–407, 2019
2019
-
[7]
PDE backstepping control of one- dimensional heat equation with time-varying domain.Automatica, 54:41–48, 2015
Mojtaba Izadi, Javad Abdollahi, and Stevan S Dubljevic. PDE backstepping control of one- dimensional heat equation with time-varying domain.Automatica, 54:41–48, 2015
2015
-
[8]
An efficient implementation of back- stepping observers for time-varying parabolic PDEs.IFAC Proceedings Volumes, 45(2):798– 803, 2012
Lukas Jadachowski, Thomas Meurer, and Andreas Kugi. An efficient implementation of back- stepping observers for time-varying parabolic PDEs.IFAC Proceedings Volumes, 45(2):798– 803, 2012
2012
-
[9]
Control and state estimation of the one-phase stefan problem via backstepping design.IEEE Transactions on Automatic Control, 64(2):510–525, 2018
Shumon Koga, Mamadou Diagne, and Miroslav Krstic. Control and state estimation of the one-phase stefan problem via backstepping design.IEEE Transactions on Automatic Control, 64(2):510–525, 2018
2018
-
[10]
Springer, 2020
Shumon Koga and Miroslav Krstic.Materials phase change PDE control&estimation. Springer, 2020
2020
-
[11]
Neural operators of backstepping controller and observer gain functions for reaction–diffusion PDEs.Automatica, 164:111649, 2024
Miroslav Krstic, Luke Bhan, and Yuanyuan Shi. Neural operators of backstepping controller and observer gain functions for reaction–diffusion PDEs.Automatica, 164:111649, 2024
2024
-
[12]
SIAM, 2008
Miroslav Krstic and Andrey Smyshlyaev.Boundary control of PDEs: A course on backstepping designs. SIAM, 2008. 17
2008
-
[13]
Zongyi Li, Nikola Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Fourier neural operator for parametric partial differential equations.arXiv preprint arXiv:2010.08895, 2020
Pith/arXiv arXiv 2010
-
[14]
Learning nonlinear operators via deeponet based on the universal approximation theorem of operators
Lu Lu, Pengzhan Jin, Guofei Pang, Zhongqiang Zhang, and George Em Karniadakis. Learning nonlinear operators via deeponet based on the universal approximation theorem of operators. Nature machine intelligence, 3(3):218–229, 2021
2021
-
[15]
Kaijing Lyu, Umberto Biccari, and Jun-Min Wang. Operator learning for prescribed-time stabilization of reaction-diffusion systems.arXiv preprint arXiv:2602.23157, 2026
arXiv 2026
-
[16]
Boundary control of a parallel-flow heat exchanger by input–output linearization.Journal of Process Control, 20(10):1161–1174, 2010
Ahmed Maidi, Moussa Diaf, and Jean-Pierre Corriou. Boundary control of a parallel-flow heat exchanger by input–output linearization.Journal of Process Control, 20(10):1161–1174, 2010
2010
-
[17]
Tracking control for boundary controlled parabolic PDEs with varying parameters: Combining backstepping and differential flatness.Automatica, 45(5):1182–1194, 2009
Thomas Meurer and Andreas Kugi. Tracking control for boundary controlled parabolic PDEs with varying parameters: Combining backstepping and differential flatness.Automatica, 45(5):1182–1194, 2009
2009
-
[18]
James Ng and Stevan Dubljevic. Optimal boundary control of a diffusion–convection-reaction PDE model with time-dependent spatial domain: Czochralski crystal growth process.Chemical engineering science, 67(1):111–119, 2012
2012
-
[19]
Closed-form boundary state feedbacks for a class of 1- d partial integro-differential equations.IEEE Transactions on Automatic control, 49(12):2185– 2202, 2004
Andrey Smyshlyaev and Miroslav Krstic. Closed-form boundary state feedbacks for a class of 1- d partial integro-differential equations.IEEE Transactions on Automatic control, 49(12):2185– 2202, 2004
2004
-
[20]
Backstepping observers for a class of parabolic PDEs
Andrey Smyshlyaev and Miroslav Krstic. Backstepping observers for a class of parabolic PDEs. Systems&Control Letters, 54(7):613–625, 2005
2005
-
[21]
Backstepping neural operators for 2×2 hyperbolic PDEs.Automatica, 178:112351, 2025
Shanshan Wang, Mamadou Diagne, and Miroslav Krstic. Backstepping neural operators for 2×2 hyperbolic PDEs.Automatica, 178:112351, 2025
2025
-
[22]
Deep learning of delay-compensated backstepping for reaction–diffusion PDEs.IEEE Transactions on Automatic Control, 70(6):4209–4216, 2025
Shanshan Wang, Mamadou Diagne, and Miroslav Krstic. Deep learning of delay-compensated backstepping for reaction–diffusion PDEs.IEEE Transactions on Automatic Control, 70(6):4209–4216, 2025
2025
-
[23]
On approximation and imple- mentation of transformation based feedback laws for distributed parameter systems.IFAC- PapersOnLine, 50(1):6786–6792, 2017
Frank Woittennek, Marcus Riesmeier, and Stefan Ecklebe. On approximation and imple- mentation of transformation based feedback laws for distributed parameter systems.IFAC- PapersOnLine, 50(1):6786–6792, 2017. 18
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.