Planar constant piecewise smooth vector fields with large hysteresis
Pith reviewed 2026-06-26 15:18 UTC · model grok-4.3
The pith
Planar systems with two linear vector fields and hysteresis switching between two boundaries begin classification of their limit sets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors establish that the planar case with two linear vector fields active across two switching boundaries under large hysteresis provides a tractable setting in which the limit sets of the resulting dynamics can be determined rigorously, serving as the foundation for a broader classification of such models.
What carries the argument
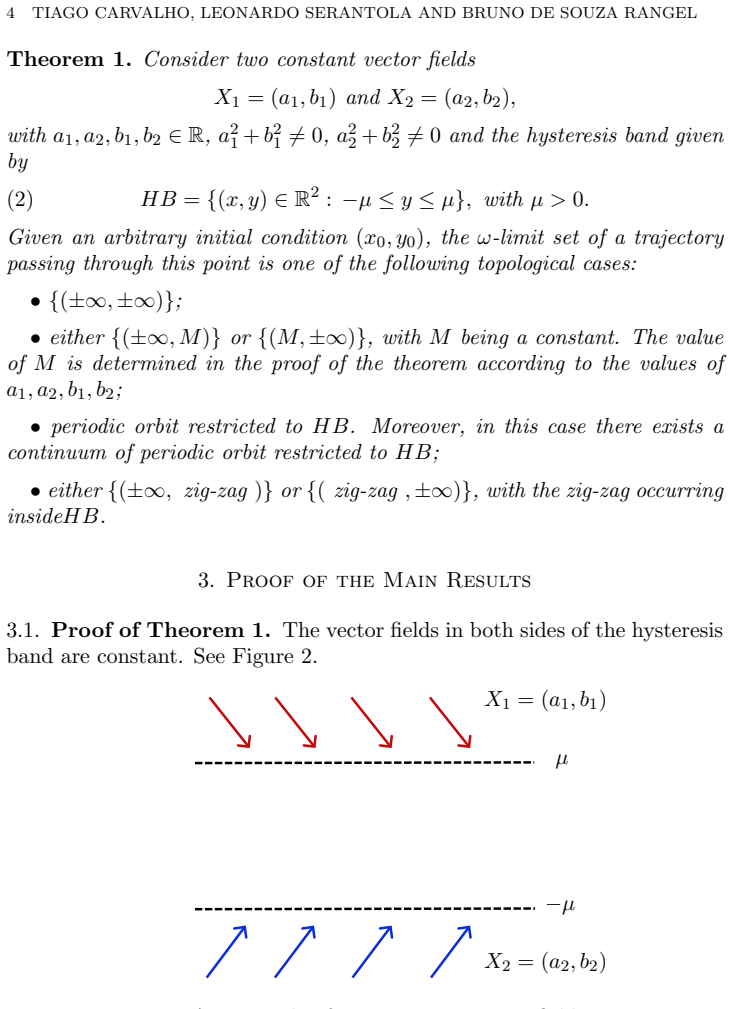
The planar hysteresis switching system consisting of two linear vector fields separated by two boundaries that trigger the switch when trajectories cross the thresholds.
Load-bearing premise
Analysis of the restricted planar case with two linear vector fields and two switching boundaries yields a classification whose structure extends to more general hysteresis models without fundamental alteration.
What would settle it
A specific planar example with two linear vector fields and two hysteresis thresholds whose observed long-term behavior falls outside the limit-set categories obtained from the planar analysis.
Figures















read the original abstract
Throughout this work, we will carry out a rigorous mathematical analysis of a class of control systems that is widely used in applications but still lacks a consistent theoretical foundation for describing the types of limit sets that may arise from its dynamics. There are applications in which, for example, a treatment for a given disease is administered until the level of diseased cells falls below a prescribed threshold C1. At that point, the treatment is suspended in order to allow the patient's organism to recover from its side effects. Subsequently, when the level of diseased cells reaches a second threshold C2 bigger than C1, the treatment is resumed, and the protocol is repeated. To the best of our knowledge, there is not a mathematical classification of such models. In this paper, we initiate what is intended to become a consistent body of literature aimed at determining the limit sets of such models. We begin with the planar case, in which two linear vector fields are active and two switching boundaries are considered. Naturally, in future developments, control systems in higher dimensions, featuring additional vector fields and more general switching manifolds, should also be considered.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript states an intention to carry out rigorous mathematical analysis of planar constant piecewise-smooth vector fields with large hysteresis and to begin classifying their limit sets. It restricts attention to the case of exactly two linear vector fields and two switching boundaries, motivated by applications such as threshold-based treatment protocols, and positions this planar setting as the starting point for a larger research program on such systems.
Significance. A delivered classification of limit sets in this restricted planar setting would address the acknowledged absence of a mathematical foundation for a class of hysteresis-based control systems that appear in applications. The choice of two linear fields and two boundaries is presented as a tractable entry point whose qualitative features might extend to higher dimensions and more fields.
major comments (1)
- [Abstract] Abstract: The abstract states an intention to perform rigorous analysis and begin classification but supplies no theorems, derivations, or concrete limit-set results; the central claim therefore rests on future work that is not yet shown.
Simulated Author's Rebuttal
We thank the referee for their review. We respond to the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract states an intention to perform rigorous analysis and begin classification but supplies no theorems, derivations, or concrete limit-set results; the central claim therefore rests on future work that is not yet shown.
Authors: The manuscript is explicitly an initial contribution that sets up the planar system with two linear fields and two switching boundaries and begins the classification by providing rigorous analysis of trajectories and identification of certain limit sets. We agree, however, that the abstract places greater emphasis on the long-term research program than on the concrete results contained in the paper. In the revised version we will update the abstract to summarize the specific setup, the theorems proved, and the limit sets classified in this work. revision: yes
Circularity Check
No significant circularity; paper initiates classification without load-bearing derivations
full rationale
The manuscript explicitly frames its contribution as the start of a new research program rather than a completed derivation or classification. It states the goal of determining limit sets for planar systems with exactly two linear vector fields and two switching boundaries, but provides no equations, fitted parameters, predictions, or uniqueness theorems that reduce to prior self-citations or inputs by construction. The abstract and setup contain no self-definitional steps, fitted-input predictions, or ansatzes smuggled via citation. The work is self-contained as an initial tractable case whose extension is left for future papers.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
D. J. W. Simpson , A compendium of Hopf-like bifurcations in piecewise-smooth dynamical systems , Phys. Lett., A 382, No. 35, 2439-2444 (2018)
2018
-
[2]
D. J. W. Simpson , Twenty Hopf-like bifurcations in piecewise-smooth dynamical systems , Phys. Rep. 970, 1-80 (2022)
2022
-
[3]
Zhang, Jingsong and Cunningham, Jessica and Brown, Joel and Gatenby, Robert , ntegrating evolutionary dynamics into treatment of metastatic castrate-resistant prostate cancer , Nature Communications 8:1816 (2017)
2017
-
[4]
e76284 (2022)
Zhang, Jingsong and Cunningham, Jessica and Brown, Joel and Gatenby, Robert , Evolution-based mathematical models significantly prolong response to abiraterone in metastatic castrate-resistant prostate cancer and identify strategies to further improve outcomes , eLife, 110, p. e76284 (2022)
2022
-
[5]
RWA 82, p
Tiago Carvalho, Jackson Cunha, Rodrigo Euzébio, Marco Florentino , Dynamics of an intermittent HIV treatment using piecewise smooth vector fields with two switching manifolds , Nonlinear Anal. RWA 82, p. 104256 (2025)
2025
-
[6]
Buzzi and Tiago Carvalho and Marco A
Claudio A. Buzzi and Tiago Carvalho and Marco A. Teixeira , Birth of limit cycles bifurcating from a nonsmooth center , J. Math. Pures Appl. 102, p. 36-47 (2014)
2014
-
[7]
Li, T-Y.; Yorke, J. A. , Period Three Implies Chaos , The American Mathematical Monthly, v. 82, n. 10, p. 985–992, (1975)
1975
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.